基于平面反射镜的物体全方位三维测量方法与制作流程
基于激光干涉仪的高精度三自由度实时测量方法及设备的制作技术

本技术提供了一种基于激光干涉仪的高精度三自由度实时测量方法及装置,解决了运动物体的俯仰角、滚动角以及轴向位移三个自由度的实时测量问题。
该装置包含高精度激光干涉测距仪、外反射角锥棱镜、平面反射镜、快门和控制及数据处理系统。
利用激光干涉测距仪、外反射角锥棱镜和快门测量运动物体不同坐标的三个点,再利用测量得到的三个距离信息及三个坐标的位置信息算出运动物体上三个点的坐标变化,最后利用本技术提供的构造理想平面的方法解算出目标的俯仰、滚动角和轴向位移量。
本技术此方法具有精度高、结构简单、数据处理量小和实时性好的特点。
权利要求书1.一种基于激光干涉仪的高精度三自由度实时测量装置,其特征在于:包括高精度激光测距仪(1)、外反射角锥棱镜(2)、直角屋脊棱镜(3)、快门(4)、控制及数据处理系统(5)、光的传输方向控制(6)、快门控制信号接口(7)、信号传输系统(8)和机构外壳(9);测量装置中高精度激光测距仪(1)和外反射角锥棱镜(2)为同轴安装,其中外反射角锥棱镜的镜面依次与直角屋脊棱镜(3)的脊线平行并使直角屋脊棱镜的入射光与反射光互相垂直;处于同一平面内的三个直角屋脊棱镜(3)之间以两两相距120°的位置固定在机构外壳上;控制及数据处理系统(5)接收由高精度激光测距仪(1)所测的距离信息d1、d2和d3,对其进行运算得到三自由度运动信息,同时控制及数据处理系统(5)发出控制指令控制快门通断状态完成测量。
2.根据权利要求1所述基于激光干涉仪的高精度三自由度实时测量装置,其特征在于:外反射角锥棱镜(2)将沿轴线的平行光束分成沿不同方向传播的三束光,这三束光的传播方向互为120°且垂直于轴线;外反射角锥棱镜(2)结合三个位置互为120°的直角屋脊棱镜实现三个不同位置点距离d1、d2和d3的测量。
3.一种基于激光干涉仪的高精度三自由度实时测量方法,利用权利要求1所述基于激光干涉仪的高精度三自由度实时测量装置,其特征在于:该测量方法包括以下步骤:步骤1)、根据测量装置的具体尺寸,计算出三个次反射镜的中心位置坐标A0(x1,y1,z1)、B0(x2,y2,z2)、C0(x3,y3,z3),控制及数据处理系统(5)发出控制指令依次控制三个快门的通断,使得三束光依次通过快门测得测量距离信息d1、d2和d3;步骤2)、代入d1、d2和d3计算出目标面上三个点的坐标A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3),根据A、B、C三点坐标确定目标面内的两个不共线的向量和由以下的表达式得到当前目标平面法线步骤3)、重复步骤1)和步骤2),获得运动后的目标平面法线步骤4)、根据坐标变换关系两个方向的旋转角分别P和R,则两个方向都存在旋转时,变换矩阵T为:计算得到:其中,步骤5)、根据求出的角位移P和R,代入到原坐标数据中获得只经过转动而没有活塞移动的目标状态坐标A1(x1,y1,z1)、B1(x2,y2,z2)、C1(x3,y3,z3),并计算对应前后坐标点距离|A1-A|、|B1-B|和|C1-C|及它们的均值,用三个点的距离差近似代替活塞移动d;步骤6)、将A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3)存起来作为下一轮测量的原平面数据,按照步骤1)中顺序测量d1、d2和d3,并重复步骤2)-步骤6)进行测量。
激光线扫描工作原理
激光线扫描工作原理激光线扫描是一种广泛应用于各个领域的技术,其工作原理是通过激光束的扫描来获取物体的形状和表面特征。
这种技术在三维建模、测量、制造等领域有着广泛的应用。
本文将详细介绍激光线扫描的工作原理。
一、激光线扫描的基本原理激光线扫描的基本原理是利用激光束的扫描来获取物体的形状和表面特征。
首先,需要使用一个激光器产生一束高强度、高聚焦的激光束。
然后,通过一个扫描装置将激光束沿着特定的路径进行扫描。
扫描装置通常由一个或多个反射镜组成,可以通过控制反射镜的运动来实现激光束的扫描。
二、激光线扫描的实现方式激光线扫描可以通过不同的方式来实现。
其中,常见的方式有平面扫描和三维扫描。
1. 平面扫描:平面扫描是指将激光束限制在一个平面内进行扫描。
这种方式适用于对平面物体的扫描,如纸张、电路板等。
通过控制反射镜的运动,可以实现激光束在平面上的扫描,从而获取物体的形状和表面特征。
2. 三维扫描:三维扫描是指将激光束沿着不同的方向进行扫描,以获取物体的三维形状。
这种方式适用于对不规则形状的物体进行扫描,如雕塑、人体等。
通过控制反射镜的运动,并结合精确的测距技术,可以实现激光束在空间中的扫描,从而获取物体的三维形状。
三、激光线扫描的工作流程激光线扫描的工作流程主要包括激光发射、激光束扫描、光信号接收和数据处理等步骤。
1. 激光发射:首先,需要使用一个激光器产生一束高强度、高聚焦的激光束。
激光器可以是气体激光器、半导体激光器等。
激光束的特性包括波长、功率、发散角等,这些特性会影响到扫描的效果。
2. 激光束扫描:通过控制反射镜的运动,将激光束沿着特定的路径进行扫描。
反射镜可以是平面镜、球面镜等。
通过调整反射镜的角度和运动速度,可以控制激光束的扫描范围和速度。
3. 光信号接收:扫描过程中,激光束照射到物体表面后会发生反射或散射。
接收器会接收到反射或散射的光信号,并将其转换为电信号。
接收器可以是光电二极管、光电倍增管等。
角秒级小角度测量莫尔条纹两平面镜多次反射法法布里-珀罗干涉数字图像处理论文

角秒级小角度测量技术及其在航天器中的应用研究【摘要】小角度是航天测量的重要参数之一。
传统的测角方案难以满足航天技术对精度及轻小化等方面的需求。
本文针对航天测量中如下所述三方面的需求,提出角秒量级三维角度测量新方法:1.针对测量卫星载荷的变形及安装位置的微小变化的需求,采用莫尔条纹与自准直结合的原理,提出正交组合光栅和数字图像处理技术实现俯仰角与偏航角的角秒级测量方案;采用Talbot自成像原理,利用莫尔条纹实现滚动角的角秒级测量方案;验证实验结果表明:本文的测量方法对俯仰角与偏航角的测量精度为0.3’’,滚动角的测量误差不大于±1 ’’,测量范围为±30’。
2.针对测量卫星桁架上有效载荷相对于基准的小角度偏转需求,基于激光在两镜间多次反射角放大原理,利用CCD相机实时监测光斑位置变化,实现俯仰角与偏航角的亚角秒级测量;验证实验结果表明:反射次数为七次时,其测量精度为0.1’’,测量范围为340’’。
用菲涅耳双棱镜取代自准直测角中的平面反射镜,采用通过CCD相机探测返回两个光斑的位置变化,实现三维小角度测量。
3.针对测量航天器部件之间的相对角位移、微振动以及光束精确瞄准等需求,采用法布里-珀罗干涉原理实现小角度测量;仿真验证了所提方法的可... 更多还原【Abstract】 The small angle measurement method with high accuracy plays an important role in the high accuracy measurement field. The traditional methods can’t meet the aerospace need. In order to meet the demand for high accuracy and three-dimensional small angle measurement in different environment of the aerospace technology, the angle measurement schemes were explored and studied.1) In order to measure the deformation and attitude of the detector in the satellite, combining moiréfringe principle and sel... 更多还原【关键词】角秒级;小角度测量;莫尔条纹;两平面镜多次反射法;法布里-珀罗干涉;数字图像处理;【Key words】arc-second level;small angle measurement;Moir éfringe;multiple reflections between two mirrors;Fabry-Perot interferometer;digital image processing;【索购硕士论文全文】Q联系Q:138113721 139938848 即付即发目录摘要9-10ABSTRACT 10第一章概述12-171.1 小角度测量技术12-141.2 国内外发展概况14-161.3 课题的研究背景161.4 研究内容及研究方法16-17第二章图像法处理角度测量数据的理论基础17-282.1 图像法数据处理的基础17-182.2 激光光斑的提取与质心定位18-232.2.1 质心法19-202.2.2 加权质心法202.2.3 Hough 变换法20-212.2.4 圆拟合法21-222.2.5 实例22-232.3 莫尔条纹图像的处理23-262.3.1 莫尔条纹的预处理24-252.3.2 基于Hough 变换的直线提取算法252.3.3 实例25-262.4 本章小结26-28第三章莫尔条纹测角法28-373.1 莫尔条纹二维测角法28-323.1.1 莫尔条纹概述28-303.1.2 基于莫尔条纹的二维测角原理30-323.2 莫尔条纹三维测角法32-343.2.1 基于Talbot 自成像测滚动角原理32-333.2.2 基于莫尔条纹的三维测角原理33-343.3 莫尔条纹测角实验34-363.3.1 验证实验与数据处理34-353.3.2 误差分析35-363.4 本章小结36-37第四章反射式测角法37-544.1 两镜多次反射测角原理37-404.1.1 多次反射的二维测角原理37-394.1.2 测量动态范围分析39-404.2 菲涅耳双棱镜自准直三维测角原理40-444.2.1 坐标旋转变换的矩阵原理40-414.2.2 双棱镜测角光路图41-424.2.3 三维角度求解原理42-444.3 两镜多次反射测角实验44-534.3.1 测角实验装置与结果处理44-464.3.2 误差分析46-484.3.3 光斑位移测量实验48-514.3.4 改进与应用51-534.4 本章小结53-54第五章透射式测角法54-635.1 法布里-珀罗干涉度测角法54-575.1.1 法布里-珀罗干涉原理54-565.1.2 法布里-珀罗干涉测角方法56-575.2 法布里-珀罗干涉测角仿真实验57-585.2.1 原理及光路图57-585.2.2 仿真数据585.3 基于光学内反射小角度测量58-625.3.1 光学内反射测角法原理59-615.3.2 基于光学内反射的差动法测角装置61-625.3.3 光学内反射测角法的特点625.4 本章小结62-63结束语63-65致谢65-66参考文献。
结构光对物体的轮廓的三维测量(最全版)PTT文档

论文的作用和目的
本文对结构光测量技术进行研究,并 阐述其基本原理和关键技术 。就利用 结构三维测量技术对物体的三维轮廓进 行了深入研究,用计算机设计好的正弦 光栅投影到参考面和被测物体表面上, 由照相机获取参考面和被测物体表面的 变形图纹,通过图像预处理、相位主值 计算、相位展开、系统标定、三维数据 计算等技术最后通过Matlab软件得到被 测物体表面的三维轮廓。
随着现代制造业的快速发展,航空航天、汽车等大型制造业对质量控制提出了更高的要求,且由于这些行业的产品一般大而重,往往 需要将质量问题在现场实时解决。 首先用计算机设计好的正弦光栅投影到参考面和被测物体表面上,用照相机获取参考面和被测物体表面的变形条纹如下图 本实验是根据结构光法测量原理对物体的三维轮廓进行测量。 得到参考面和被测物体表面条纹图后,经过图像处理,利用FTP方法计算被测物体和参考面的相位差,最后进行相位展开,得到展开 后的相位差分布如下图,图(a)为折叠相位图(b)为相位展开后的结构 本文对结构光测量技术进行研究,并阐述其基本原理和关键技术 。 由于三维测量的复杂性和特殊性,一直是科技界努力突破的技术难题。 正是基于这种需求,近20年来各种便携式光学三维测量技术相继问世,其中结构光三维测量技术由于具有便携性强、测量速度快、测 量精度高等优点,已成为目前使用最为广泛的一种三维测量技术。
大学物理实验---三维全息光栅
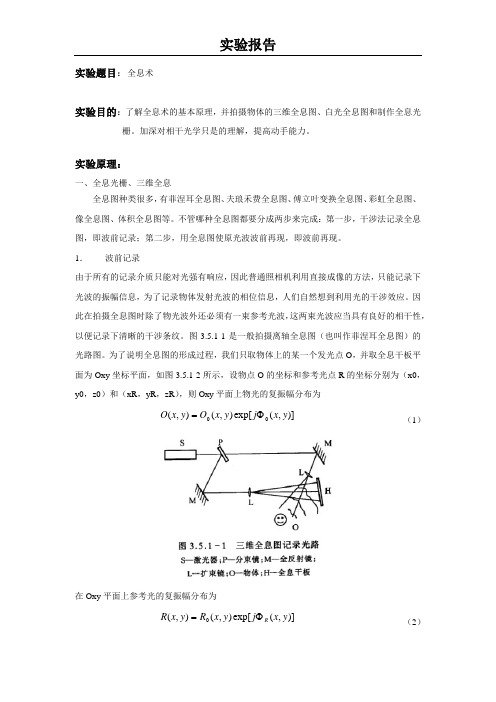
图2
实验仪器
1.激光器(40mw)1 台 4.干板架 1个 1块 2.定时器 1台 3.扩束镜 6.小物体 1个 1个 9.通用底座 4个 5.载物台 1 个
7. 白板或毛玻璃
8.二维调整架 1 个
红敏光致聚合物全息干板性能指标 RSP-1 型红敏光致聚合物全息干板是一种位相型记录介质,它不同于银盐干板,属于有 机聚合的非银盐感光材料。它的性能有以下几个指标: 1、对波长λ=632.8nm、647.1nm 的红光敏感。 2、衍射效率高,>80%。 3、感光灵敏度 5~10mJ/cm2 4、折射率调制度Δn=0.0089 5、分辨率,>4000 条/mm 6、光谱吸收曲线(如图 4 所示)
2. 波前再现
(6)
设再现用的照相光波在 Oxy 平面上的分布为
C ( x, y ) = C 0 ( x, y ) exp[ jΦ C ( x, y )]
此再现光波经过全息图后衍射波的复振幅分布为
Hale Waihona Puke (7)实验报告t = Ct H = Cβ 0 + Cβt[O02 + R02 + 2O0 R0 cos(Φ 0 − Φ R )]
可用作全息记录的感光材料很多, 一般最常用的是卤化银乳胶涂布的超微粒干板, 称为全息 干板,按图 3.5.1-1 拍摄的全息图也叫做平面全息图,我们用振幅透射率来表示其特性,一 般它是一个复函数,具有下面的形式:
τ H ( x, y ) = τ 0 ( x, y ) exp[ jΨ ( x, y )]
由于所有的记录介质只能对光强有响应, 因此普通照相机利用直接成像的方法, 只能记录下 光波的振幅信息,为了记录物体发射光波的相位信息,人们自然想到利用光的干涉效应。因 此在拍摄全息图时除了物光波外还必须有一束参考光波, 这两束光波应当具有良好的相干性, 以便记录下清晰的干涉条纹。图 3.5.1-1 是一般拍摄离轴全息图(也叫作菲涅耳全息图)的 光路图。为了说明全息图的形成过程,我们只取物体上的某一个发光点 O,并取全息干板平 面为 Oxy 坐标平面,如图 3.5.1-2 所示,设物点 O 的坐标和参考光点 R 的坐标分别为(x0, y0,z0)和(xR,yR,zR) ,则 Oxy 平面上物光的复振幅分布为
高层钢结构施工测量放线工法(全站仪 三维坐标定位)
高层钢结构施工测量放线工法(全站仪三维坐标定位)1:高层钢结构施工测量放线工法(全站仪三维坐标定位)1. 引言1.1 目的本文档旨在介绍高层钢结构施工中采用全站仪进行测量放线的工法,包括测量工具、测量原理、操作步骤和注意事项等。
1.2 背景高层钢结构施工对测量放线精度要求高,传统的手工放线方法容易出现误差,引入全站仪进行三维坐标定位测量可以提高施工精度和效率。
2. 测量工具2.1 全站仪全站仪是一种多功能测量仪器,具有测距、测角、测坐标等功能,适用于各种不同类型的测量。
2.2 其他辅助工具除了全站仪,还需要配备三角架、反射镜、测量杆等辅助工具,以保证测量过程的准确性。
3. 测量原理全站仪通过发送激光束和接收反射镜反射的激光束,来测量目标点的坐标。
通过测量多个点的坐标,可以确定各点之间的距离和角度,从而确定放线位置。
4. 操作步骤4.1 设置全站仪在开始放线前,需要进行全站仪的设置,包括设置高度、坐标系、测量精度等参数。
4.2 安装反射镜将反射镜安装在待测量点上,确保反射镜与目标点之间没有遮挡物。
4.3 连接计算机将全站仪通过USB或蓝牙与计算机连接,以便进行数据处理和存储。
4.4 测量目标点在全站仪的监测界面上选择目标点,并进行测量。
根据实际情况,可以选择单次测量或多次平均测量。
5. 注意事项5.1 环境因素施工现场的环境因素,如光照、遮挡物等会影响全站仪的测量精度,需要合理安排测量时间和位置。
5.2 操作规范操作人员需要按照操作规范进行测量,包括设置参数、安装反射镜、测量目标点等步骤。
6. 附件本文档不涉及附件。
7. 法律名词及注释本文档不涉及法律名词和注释。
2:高层钢结构施工测量放线工法(全站仪三维坐标定位)1. 引言1.1 目的本文档旨在详细介绍高层钢结构施工中采用全站仪进行测量放线的工法,以及相关的操作步骤和注意事项。
1.2 背景在高层钢结构施工过程中,测量放线是一个关键的环节。
传统的手工放线方法存在一定的误差,因此引入全站仪进行三维坐标定位测量可以提高施工的精度和效率。
全站仪坐标测量步骤
全站仪坐标测量步骤
为了测量一个地面点的水平和垂直位置(三维坐标),我们需要使用全站仪。
下面是全站仪坐标测量的步骤:
1. 设置全站仪
首先,必须在地面上设置全站仪。
这可以通过放置三脚架和调整水平仪进行完成。
全站仪必须稳定,保持在恒定的水平状态下,以便在整个测量过程中保持准确性。
2. 设置反射器
接下来,必须将反射器设置在将要测量的点(或目标)上。
反射器必须放置在垂直于地面的支撑物上,以确保其稳定性。
反射器的位置必须与全站仪的初始位置相对应,并且必须能够在全站仪视野内被看到。
3. 观察测量点
全站仪旋转,通过透镜观察反射器,并记录反射器的位置。
这个过程叫做“目标测量”。
全站仪可以使用自动目标识别系统,自动锁定反射器,并记录其位置。
在手动模式下,用户必须通过视觉确认反射器位置,然后使用全站仪记录这些坐标。
之后,全站仪旋转并观察其他点,在记录每个点的坐标后,测量就完成了。
4. 计算坐标
测量完成后,用户必须将记录的反射器坐标转换为目标点的实际坐标。
为此,必须使用三角函数和三角测量公式来计算实际坐标。
全站仪测量的精度非常高,可以达到毫米级精度。
它广泛应用于建筑、土木工程和地质测量中。
全息照相实验报告
全息照相实验报告实验报告学⽣姓名:学号:指导教师:实验地点:实验时间:⼀、实验室名称:全息照相实验室⼆、实验项⽬名称:全息照相实验三、实验学时:四、实验原理:普通照相是把物体通过照相物镜成像于照相底⽚上,每个物点转换成⼀个对应的像点。
并将被摄物体在某个瞬时漫射的光波(物光波)所反映的物体的亮度分布成像于底⽚上,底⽚记录的是与物光波振幅的平⽅成⽐例的强度分布,它丢失了物光波的相位信息,所以普通照⽚上的物像没有⽴体感。
全息照相虽然也是⼀种照相过程,但在概念上同普通照相根本不同。
全息照相记录的不是物光的强度分布,⽽是⼲涉条纹。
⼲涉条纹的可见度反映了物光波的振幅,⼲涉条纹的疏密和取向则由物光波的相位决定。
物体上每个点发出的光波记录在整个底⽚上,换⾔之,底⽚上的每个点都记录了所有物点发出的光波。
这样⽤⼲涉法把物光波场的“全部信息”都记录下来所获得的照⽚,称为全息照⽚或全息图。
由全息图可以再现物光波,从⽽形成与原物体逼真的三维像。
这个物光波的完整记录与再现的过程,便称为全息术或全息照相。
(⼀)透射式全息照相1. 物光波波前的记录物光波波前信息包括它的振幅和相位,⽽现有的记录介质只对光的强度即振幅的平⽅产⽣响应。
因此,在波前记录时必须把相位信息转换为强度信息。
为此,⼈们借助于参考光与物光的⼲涉来实现上述转换。
显然,参考光和物光应具有很好的相⼲性,⽽且记录物光波波前的光路需按⼀定的规则布置,以保证获得更佳的⼲涉效果。
⼀种常⽤的静物全息记录光路如图所⽰。
激光束经分束镜分为两束光,⼀束经全反射镜反射并扩束后,均匀照明被摄物,再经被摄物漫反射,带有了被摄物的信息,照射在记录介质——⼲板上,这束光称为物光;另⼀光束经全反射镜反射与扩束镜扩束后,直接均匀地照明⼲板,这束光不带物的信息,称为参考光。
两光波在⼲板上相遇产⽣相⼲叠加形成⼲涉图样,使感光物质感光记录在⼲板上。
经暗房操作处理后,成为可永久保存并随时重现光波波前的全息照⽚。
三坐标测量流程
三坐标测量流程三坐标测量是一种精密测量技术,常用于对物体形状、尺寸、位置等进行测量。
三坐标测量需要使用专业的设备和软件,并且需要经过一系列的步骤才能得到精确的结果。
下面将详细介绍三坐标测量的流程。
一、准备工作1. 确定测量目的和要求:在进行三坐标测量之前,首先需要明确测量目的和要求,例如确定零部件尺寸是否符合设计要求等。
2. 确定测量设备:根据测量目的和要求,选择适合的三坐标测量设备。
常见的设备有手动三坐标测量机、自动三坐标测量机等。
3. 准备工具和辅助装置:根据实际情况准备相应的工具和辅助装置,例如夹具、支撑架等。
4. 清洁被测物体表面:清洁被测物体表面,以保证精度和减少误差。
二、建立工件坐标系1. 建立参考平面:在被测物体上选取一个平整且与设计有关联的部位作为参考平面。
将该平面与三坐标测量机的工作台建立联系。
2. 建立坐标系:在参考平面上选择三个不共线的点,通过三点定位法建立工件坐标系。
根据需要可以建立多个坐标系。
3. 标记测量点:在需要测量的部位上标记出测量点,以便后续进行测量。
三、进行测量1. 设置测量参数:根据需要设置测量参数,例如测量精度、扫描速度等。
2. 放置被测物体:将被测物体放置在三坐标测量机的工作台上,并使用夹具和支撑架固定。
3. 进行扫描或触发式测量:根据实际情况选择扫描式或触发式进行测量。
扫描式需要对整个被测物体进行扫描,触发式则只需对标记的点进行单独测量。
4. 保存数据:将得到的数据保存到计算机中,并生成相应的报告和图形结果。
四、数据处理和分析1. 数据处理:对保存下来的数据进行处理,例如去除噪声、滤波等操作。
2. 数据分析:利用专业软件对数据进行分析和比较,得出结论并生成报告。
五、校验和调整1. 校验测量精度:对测量结果进行校验,以保证测量精度符合要求。
2. 调整被测物体:如果发现被测物体存在偏差,可以通过调整夹具或支撑架等方式进行微调。
3. 重新测量:在校验和调整之后,需要重新进行测量,以确保得到准确的结果。
三维激光扫描技术的原理
三维激光扫描技术的原理三维激光扫描技术是一种通过激光器发射激光束并利用传感器接收反射光来获取物体表面的三维坐标信息的非接触性测量方法。
它广泛应用于工业制造、文化遗产保护、建筑和土木领域,可用于生成实体模型、进行尺寸测量和三维重建等应用。
首先,激光器会发出一束激光束,并通过透镜或反射镜进行聚焦。
这束激光束会以一定的速度扫描整个物体表面。
扫描可以是机械扫描,即通过激光扫描仪的运动来实现,也可以是线性扫描,即通过固定激光扫描仪,利用特殊的偏折镜使激光束扫描物体表面。
接下来,激光束照射到物体表面后会发生反射。
传感器接收到反射光,并将其转换为电信号。
传感器一般采用光电二极管或光电倍增管来接收激光反射光,并将光信号转化为电信号。
然后,通过时间测距原理来确定物体表面的距离。
激光光束从激光器发射到物体表面并经过反射返回传感器需要一定时间,这个时间与激光光束的速度和物体表面的距离成正比。
传感器测量激光的发射与接收时间差,并通过光速的已知值计算出物体表面的距离。
最后,通过坐标变换将物体表面的距离信息转换为三维坐标。
在激光扫描过程中,激光扫描仪在经过不同位置时记录了不同位置的距离信息。
这些距离信息与激光扫描仪的运动轨迹相对应。
通过计算和处理这些距离和位置信息,可以生成物体表面的三维坐标数据。
需要注意的是,为了获得更高精度的扫描结果,通常需要进行额外的校准和补偿,例如对光束的偏差进行校正、利用多个光电传感器进行测量来减少误差等。
总结起来,三维激光扫描技术通过激光器发射激光束,利用传感器接收反射光并通过时间测距原理确定物体表面的距离,最终通过坐标变换转换为三维坐标信息。
这种技术具有高精度、非接触性和快速获取三维信息等优点,因此在许多领域中得到了广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本技术公开了一种基于平面反射镜的物体全方位三维测量方法,首先是搭建摄像机和投影仪组成的条纹投影轮廓术系统,将贴附有标定纸条的左平面反射镜和右平面反射镜设置在被测物体后面,使用投影仪向被测物体投出相移条纹,并触发摄像机同步采图,将缠绕相位图解算为绝对相位图,由绝对相位得到被测物体的三维点云数据,并用标定纸条对平面反射镜进行标定,实现通过单次测量即可得到物体全方位的三维点云数据,最后利用ICP迭代算法对点云进行配准,使点云之间相同的部分尽可能地重合。
本技术具有低成本,简单高效,高精度的优势。
技术要求1.一种基于平面反射镜的物体全方位三维测量方法,其特征在于步骤如下:步骤一:搭建基于平面反射镜的条纹投影轮廓术系统,首先搭建摄像机和投影仪组成的条纹投影轮廓术系统,然后将贴附有标定纸条的左平面反射镜和右平面反射镜设置在被测物体后面,调节贴有标定纸条的平面反射镜的位置,通过平面反射镜的反射作用,摄像机同时观察到被测物体的三个视角的信息;步骤二:投影相移条纹并采图,使用投影仪向被测物体投出相移条纹,并触发摄像机同步采图;步骤三:求解相位并重构点云,对于步骤二中采集到的条纹图案,采用基于条纹投影的相移轮廓术解算出不同频率条纹下的缠绕相位图,随后利用时域相位解缠算法,将缠绕相位图解算为绝对相位图,利用投影仪和摄像机的标定参数,由绝对相位得到被测物体的三维点云数据;步骤四:用标定纸条对平面反射镜进行标定,即利用步骤二和步骤三中的方法对平面反射镜上面的标定纸条的三维信息进行重构,得到标定纸条的三维空间姿态信息,并进行平面拟合,用以近似代替平面反射镜的空间姿态信息,计算拟合平面的单位法向量以及世界坐标系原点到拟合平面的距离,完成两块平面反射镜的标定工作;步骤五:三维点云的转换,根据步骤四得到的平面反射镜的标定参数,计算得到左右平面镜反射镜中三维点云数据到真实世界坐标系的转换矩阵,从而将左右平面镜中的三维点云数据转化到物体实际所在的统一的世界坐标系下,以此方式实现通过单次测量即可得到物体全方位的三维点云数据;步骤六:三维点云的配准,利用ICP迭代算法对点云进行配准,使点云之间相同的部分尽可能地重合。
2.根据权利要求1所述的方法,其特征在于步骤一中,一块标定纸条贴附在左平面反射镜的下部偏左部位,另一块标定纸条贴附在右平面反射镜的下部偏右部位,调节平面反射镜的位置,使两块平面反射镜的交线正对被测物体和投影仪,左平面反射镜、右平面反射镜的夹角在115°-125°之间,以摄像机观察到的三个像均匀分布在视场中,互不重合,且三个像不被标定纸条遮挡。
3.根据权利要求1所述的方法,其特征在于步骤二中,利用基于条纹投影的相移轮廓术,使用投影仪向被测物体投出一系列正弦条纹图案,经过物体漫反射后被摄像机同步采集,采集到的光强表示为:其中N是相移步数,n是相移指数,且n=0,1,...,N-1,In(xc,yc)是对应点的光强,A(xc,yc)为在(xc,yc)点处的背景光强,B(xc,yc)为在(xc,yc)点处的正弦条纹的调制度,为在(xc,yc)点处的待求被测物体的相位。
4.根据权利要求1所述的方法,其特征在于步骤三中,由摄像机同步采集到的经过被测物体表面调制后的条纹图案通过下式解出被测物体的缠绕相位:缠绕相位与绝对相位之间的关系如下式所示:其中Φh(xc,yc)是高频条纹在(xc,yc)点处的无歧义绝对相位,是高频条纹在(xc,yc)点处的缠绕相位,kh(xc,yc)是高频条纹在点(xc,yc)处的条纹级次;利用一个连续无歧义的相位Φl(xc,yc)作为辅助相位,然后根据辅助相位和缠绕相位之间的频率关系来找到各个像素点所对应的级次关系,具体如下式:其中fh是高频条纹的频率,fl是无歧义低频条纹的频率,Φh(xc,yc)是高频条纹在(xc,yc)点处的绝对相位,是高频条纹在(xc,yc)点处的缠绕相位,Φl(xc,yc)是低频条纹在(xc,yc)点处的无歧义绝对相位,kh(xc,yc)是高频条纹在(xc,yc)点处的条纹级次,round[]是就近取整运算;得到绝对相位之后,利用标定板对投影仪和摄像机组成的系统进行标定,通过标定得到的参数建立摄像机CCD上二维图像与被测物体点云空间位置的对应关系,从而将摄像机拍摄到的二维图像重建为对应的空间三维点云数据,具体关系式如下:其中(xw,yw,zw)是待测点在世界坐标系中的坐标,R和T分别是由世界坐标系到相机坐标系的旋转矩阵和平移矩阵,u0和v0分别是物理坐标系与像素坐标系之间的偏移量,(u,v)是点(xw,yw,zw)成像在CCD上的像素坐标,α和β是在像素坐标系上的尺度因子,s是一个常数尺度因子。
5.根据权利要求1所述的方法,其特征在于步骤四中,用标定纸条对平面反射镜进行标定,即选取每块平面反射镜上标定纸条的中心部分,并利用步骤二及步骤三所述的重构方法对这一部分进行重构,得到对应块的三维点云数据,得到三维点云后,通过后续的平面拟合可得到平面反射镜的空间姿态信息,最后利用空间姿态信息算得平面反射镜标定参数nk和dk,从而完成平面反射镜的标定,具体方法如下:获得的点云由很多独立的点组成,由于标定纸条的表面粗糙度以及测量的误差,所以每个点并不是都处于同一个平面内,但是这些点都非常接近纸面所在平面,利用RANSAC算法对获得的标定纸条点云进行平面拟合,在点云中随机选取3个点并建立一个平面Ax+By+Cz+D=0,计算点云中其他所有点到这个平面的距离之和,计算点云中各点与这个平面的距离误差及所有误差的RMS,设定阈值,使平面拟合的RMS尽可能的小,不断选取新的平面直至距离之和满足阈值要求;由拟合平面的方程得到这个平面的单位法向量由于世界坐标系原点O的坐标(xo,yo,zo)在系统标定之后得到,因此利用点和平面之间距离的计算公式算得世界坐标系原点到平面反射镜之间的距离dk,其中A、B、C、D均为拟合平面Ax+By+Cz+D=0的参数,至此计算得到标定参数nk和dk,完成平面反射镜的标定。
6.根据权利要求1所述的方法,其特征在于步骤五中,利用平面反射镜的标定参数nk和dk和平面反射镜的成像几何模型,建立平面反射镜中的虚拟点与物体实际点之间的对应关系如下式所示:其中是平面反射镜中的虚拟点,是物体的实际点,I是单位矩阵,nk是标定得到的平面反射镜的单位法向量,dk是世界坐标系原点到平面反射镜之间的距离,用Tm来表示平面反射镜的反射矩阵;即为(xw,yw,zw),由此得到一个转换矩阵Tm-1,将平面反射镜视角中的三维点云数据转换至物体实际所在坐标系中,转换关系为7.根据权利要求1所述的方法,其特征在于步骤六中,利用ICP迭代算法对点云进行配准,设两块点云之间相同的部分分别表示为:P={pi|pi∈R3,i=1,2,…,a}Q={qj|qj∈R3,j=1,2,…,b}其中Q是参考点云,P是待配准的点云,a为点云P中点的数量,b为点云Q中点的数量,R3表示这些点都是三维点,均有x、y、z坐标;首先取一对在实际中最相近的点:点云P中的一点pi以及点云Q中的一点qj,取n对这样的点对,利用奇异值分解法(SVD)找到两点之间的旋转及平移关系(RC,TC),再定义配准的评价函数:用配准之后三片点云重复部分的重合度来评价配准的效果,并定义阈值的高低,重合度越高理论上需要的阈值越低,当评价函数的值小于定义的阈值之后则完成配准,否则取新的点集,继续迭代直至满足要求,从而完成点云的配准,实现更高精度的全方位三维信息测量。
技术说明书一种基于平面反射镜的物体全方位三维测量方法技术领域本技术属于光学测量技术与计算机立体视觉领域,特别是一种基于平面反射镜的物体全方位三维测量方法。
背景技术随着现代信息技术的发展,三维成像技术被广泛应用于监控安防、数字文化保护、逆向工程、产品质量检测和虚拟现实等领域。
作为三维成像技术中的一种,基于结构光投影和三角测量原理的条纹投影轮廓术具有非接触、精度高、速度快等优点,近些年来一直作为热门方向被研究。
但是单纯的获取被测物体的一部分三维信息并不能很好地满足实际生产的需要,在实际生产中,通常要获取被测物体的全方位三维信息(文献“Automated 360°profilometry of3-D diffuse objects”,作者Maurice Halioua等)。
由于光沿直线转播的性质,所以在由单个摄像机和投影仪组成的传统的条纹投影轮廓术系统中,只有同时被投影仪投出条纹图案照射到以及摄像机拍摄到的部分才能被重构为三维点云数据。
其他部分由于被遮挡,无法被重构,从而实现不了物体全方位三维信息的测量。
为了实现全方位三维信息的测量,通常利用到转台或者机械臂等工具(文献“A 3Dmeasurement method based on multi-view fringe projection by using aturntable”,作者Li-mei Song等),通过对多个视角的测量,获得多个视角的三维点云数据,最后对这些点云数据进行拼接,从而得到全方位的三维点云数据。
由于这种方法需要多次测量,且后续的点云拼接操作复杂,所以存在着费时费力,精度易受转台平整度等机械因素影响,无法测量动态场景等缺陷。
除此之外,也有人提出用平面反射镜进行全方位的三维测量(文献“Surround structured lighting:3-D scanning with orthographicillumination”,作者Douglas Lanman等),但是这些系统普遍存在着成本不菲,光路复杂,系统标定操作繁琐,测量精度低等问题。
技术内容本技术的目的在于提供一种成本低、简单高效和高精度的基于平面反射镜的物体全方位三维测量方法。
实现本技术目的的技术解决方案为:一种基于平面反射镜的物体全方位三维测量方法,步骤如下:步骤一:搭建基于平面反射镜的条纹投影轮廓术系统,首先搭建摄像机和投影仪组成的条纹投影轮廓术系统,然后将贴附有标定纸条的左平面反射镜和右平面反射镜设置在被测物体后面,调节贴有标定纸条的平面反射镜的位置,通过平面反射镜的反射作用,摄像机同时观察到被测物体的三个视角的信息;步骤二:投影相移条纹并采图,使用投影仪向被测物体投出相移条纹,并触发摄像机同步采图;步骤三:求解相位并重构点云,对于步骤二中采集到的条纹图案,采用基于条纹投影的相移轮廓术解算出不同频率条纹下的缠绕相位图,随后利用时域相位解缠算法,将缠绕相位图解算为绝对相位图,利用投影仪和摄像机的标定参数,由绝对相位得到被测物体的三维点云数据;步骤四:用标定纸条对平面反射镜进行标定,即利用步骤二和步骤三中的方法对平面反射镜上面的标定纸条的三维信息进行重构,得到标定纸条的三维空间姿态信息,并进行平面拟合,用以近似代替平面反射镜的空间姿态信息,计算拟合平面的单位法向量以及世界坐标系原点到拟合平面的距离,完成两块平面反射镜的标定工作;步骤五:三维点云的转换,根据步骤四得到的平面反射镜的标定参数,计算得到左右平面镜反射镜中三维点云数据到真实世界坐标系的转换矩阵,从而将左右平面镜中的三维点云数据转化到物体实际所在的统一的世界坐标系下,以此方式实现通过单次测量即可得到物体全方位的三维点云数据;步骤六:三维点云的配准,利用ICP迭代算法对点云进行配准,使点云之间相同的部分尽可能地重合。