钻机移动装置制造工艺的研究
我国海洋石油钻井平台现状与技术发展分析
我国海洋石油钻井平台现状与技术发展分析随着我国经济持续高速增长,油气资源供应不足将成为阻碍经济发展的主要矛盾。
为提高对油气资源的占有量,海洋油气的开发己经成为我国实现能源可持续发展的战略重点,加快国内油气勘探开发,大力拓展海外充分利用国内外2种资源、2 个市场,保证石油的安全稳定供应己成为我国的国策。
海洋石油钻井装备产业是以资本密集和技术密集为主要特征、为海洋油气资源开发提供生产工具的企业集合,是海洋油气产业与装备制造业的有机结合体。
我国海洋石油钻井平台现状11我国海洋石油钻井装备产业取得骄人业绩我国油气开发装备技术在引进、消化、吸收、再创新以及国产化方面取得了长足进步。
(1)建造技术比较成熟海洋石油钻井平台是钻井设备立足海上的基础。
从1970年至今,国内共建造移动式钻采平台53座,己经退役7座,在用46座。
目前我国在海洋石油装备建造方面技术已经日趋成熟,有国内外多个平台、船体的建造经验,己成为浮式生产储油装置(FPSO)的设计、制造和实际应用大国,在此领域我国总体技术水平己达到世界先进水平。
(2)部分配套设⑵ 部分配套设备性能稳定海洋钻井平台配套设备设计制造技术与陆上钻井装备类似,但在配置、可靠性及自动化程度等方而都比陆上钻井装备要求更苛刻。
国内在电驱动钻机、钻井泵及井控设备等研制方而技术比较成熟,可以满足7000m 以内海洋石油钻井开发生产需求。
宝石机械、南阳二机厂等设备配套厂有着丰富的海洋石油钻井设备制造经验, 其产品完全可以满足海洋石油钻井工况的需要。
(3)深海油气开发装备研制进入新阶段目前,我国海洋油气资源的开发仍主要集中在200m水深以内的近海海域,尚不具备超过500m深水作业的能力。
随着海洋石油开发技术的进步,深海油气开发己成为海洋石油工业的重要部分。
向深水区域推进的主要原因是由于浅水区域能源有限,满足不了能源需求的快速增长需求,另外,随着钻井技另外,随着钻井技术的创新和发展,己经能够在许多恶劣条件下开展深水钻井。
钻机模块介绍

辅助设备 供气设备、辅助发电设备、钻鼠洞设备、辅助起重设备、工作间/控 制间/储藏间等、固井设备、测井设备、录井设备
SY/T 5323-92 SY/T 5244-91
The types and basic parameters for oil drilling rigs Specification for wire rope for petroleum and gas plant Main hoisting equipment for drilling rig Kill & choke manifold Drilling fluid manifold Safety rules for offshore fixed platform (PRC Economy and Trade Committee 2000)
2、钻前准备
3、钻进(Drilling)
根据不同的地层情况、钻进深度、钻头类型等,使钻头转速n(r/min )、钻压P(t)、泵流量Q(L/min)和泥浆性能各自都处于最佳参数 值,以获得最快的钻进速度。
4、固井(Cementing) 在井眼内下入一层套管,并在套管与井壁的环形空间里灌注水泥浆进行封固。
钻井绞车、辅助刹车、游动系统(钢丝绳、天车、游动滑车及大沟) 、井架(热镀锌低合金钢制造)、起下操作的井口工具及机械化设备 (吊环、吊卡、卡瓦、动力大钳或“铁钻工”、立根移运机构)
动力驱动系统设备:为钻机相关设备提供动力
柴油发电机组及供油设备、或交流/直流电动机及其供电、保护、控制 设备等
传动系统设备:连接动力机与工作机,实现从驱动设备到工作机组的 能量传递、分配及运动方式的转换
锚杆钻机的发展现状

锚杆钻机的发展现状锚杆钻机是实现锚杆支护技术的重要机械设备,随着锚杆支护技术的飞速发展,用于钻凿锚杆孔的锚杆钻机也得到了快速发展。
展望它的发展,有助于不断促进锚杆钻机设备的技术进步,使其更加适应现代支护技术的需要。
本文就目前煤矿专用锚杆钻机的现状作以阐述,希望对今后锚杆钻机的研制生产有所参考。
1 国外锚杆钻机技术发展状况目前,国外应用较为普遍的单体锚杆钻机主要有风动和液压锚杆钻机两种。
风动锚杆钻机有澳大利亚的克莱姆公司WOMBAT型,阿明克公司GO.PHER型和瑞典PRB一300型等;液压锚杆钻机有英国WlSP型,澳大利亚PROBAM型等。
特别是澳大利亚在风动锚杆钻机方面一直保持着较为领先的技术和产品,主要有柱塞马达与齿轮马达2种,采用玻璃钢碳素纤维支腿,产品特点是重量轻、扭矩大、噪音低、耗气量小、机身矮等。
新型锚机组的出现虽然只有l0多年,这种一体化的锚杆支护技术在国外越来越受到重视,发展也很快,常采用性能优良、技术先进、操作维修方便、应用范围广的锚杆钻机与采掘设备配套的锚机组。
如乔伊公司生产的14CM10型采掘锚机组,12ED18型采锚机组,鲍拉特公司的E230型掘锚机组,郎艾道公司的RBI一50L型锚杆钻车等班工作效率已达120—240根。
2国内锚杆钻机的研制状况我国煤矿专用锚杆钻机的研究始于20世纪70年代末,先后研制过机械支腿式锚杆钻机、钻车式锚杆钻机,支腿与导轨式液压锚杆钻机、支腿式气动锚杆钻机、非机械传动电动锚杆钻机、机载式锚杆钻机等。
已形成液压、电动、气动三大系列30多个品种。
(I)液压锚杆钻机液压锚杆钻机是通过液压马达驱动旋转切削破岩的。
通常都附带泵站,由泵站输送的液压油提供动力.带动液压马达转动。
现多采用低速转动的结构,省去齿轮传动机构,直接带动钻机。
液压锚杆钻机可分为单体型和手持型2种形式。
单体钻机主要是MZ系列,由主机、操纵架和泵站三大部分组成。
这种机型只能钻顶部锚杆孔,但钻孔平稳,一次推进行程长。
煤矿专用定向钻机定向钻进技术与装备
2.定向钻机系列简介——钻机
(4)ZYWL-4000D定向钻机(经济型)
13000钻机优势
岩石钻孔深度 定向钻孔直径 孔底马达转矩
钻杆直径 给进/起拔力
最大转矩 电机功率
≥500m
≥800m
提高钻孔效率,降低孔内事故
96mm
120mm
提高钻孔瓦斯抽放效率
450N.m
800N.m
提高了钻机岩石钻进效率
73mm 160kN 6000N.m
89mm 280kN 13000N.m
ZYWL-4000D定向钻机(标准型)
2.定向钻机系列简介——钻机
(3)ZYWL-4000D定向钻机(标准型)
项目
钻进深度 开孔直径 终孔直径 钻杆直径 额定输出转速 额定输出扭矩 给进/起拔力 给进行程 正常给进速度 调斜角度 制动扭矩 爬坡能力 电机功率
外形尺寸
整机重量
单位
m mm mm mm r/min N.m kN mm m/min ° N.m ° kW
为降低钻机成本,对普通履带式钻机的进行定向化改进,设计了经济型 定向钻机,钻机结构尺寸进一步缩小,开孔角度调斜范围进一步扩大,性价 比大幅提高。可配备履带式泵车(进口)或底座式泥浆泵(国产)。
ZYWL-4000D定向钻机(经济型)
履带式泵车(进口泵)
国产泥浆泵
2.定向钻机系列简介——钻机
(4)ZYWL-4000D定向钻机(经济型)
自动化猫道设计在石油钻机上的应用研究
自动化猫道设计在石油钻机上的应用研究
图1 动力猫道示意图
电气控制系统
在运动系统时保证参数合理非常重要,设置
的控制单元,75kW、380V/50Hz
电源。
在控制系统监控工作方面,相关人员应努力做到稳定性高和效率高,以西门子PLC相应的无线控制标准为依据,对司钻一体化控制、紧急控制、无线遥控等综合控制模式进行科学安排。
控制器运转时,若发生局部故障,则当系统具进行顶驱作业,并将钻杆下入V形槽。
当所有的钻杆型槽后,确认它和挡板非常接近时才将吊卡打开。
在这个过程中,钻杆一定要移动到与V形槽完全接触的位置。
然后,根据系统的操作规程来启动双动绞车,根据实际的使用要求将送钻柱装置降到与猫道水平面相齐的位置。
之后,根据标准进行安全销作业,作业结束后再收回。
根据说明书,并且把钻杆从V形槽中推出来。
最后,为了保证内倾斜机构稳定运行,务必将钻杆推到管排架处,然后将内倾斜机构调整到初始状态。
踢出机所示。
图3 踢出机构示意图
石油钻机自动化猫道设计应用案例
在开采某油井时相关人员使用了石油钻机猫道自动化设计方式,该油井具有如表1所示的井身结构。
表1 井身结构情况
套管外
(mm)
固井井
深(m)
水泥封固
井端(m)
套管鞋
深度(m)
层位
固井
井眼
直径
(mm)
139.77417.8
6500~
7417.8
6800.32E1-2km168.3
-7515-0.00K1bs111.1
图2 倾斜机构示意图。
正反循环钻机

正反循环钻机--混凝土灌注桩施工(图)标签:正反循环钻机混凝土灌注桩施工上一篇:沉管灌注桩施工---锤击沉管灌注下一篇:静力压桩机的施工混凝土灌注桩施工[目的要求]了解: 钻孔机械设备, 干作业成孔灌注桩施工工艺, 泥浆制备方法,泥浆护壁成孔灌注桩施工常见工程质量事故及处理方法,挖孔灌注桩施工工艺。
熟悉:护筒的作用及要求,水下浇筑混凝土方法,沉管桩施工中常见问题的分析与处理。
掌握:沉管灌注桩施工工艺。
[讲授重点] 沉管灌注桩施工工艺。
[讲授难点] 沉管灌注桩施工工艺。
泥浆护壁成孔灌注桩施工工艺。
[讲授内容]一、钻孔灌注桩施工(一)钻孔机械设备目前常见的钻孔机械有:全叶螺旋钻孔机、回转钻孔机、潜水钻机、钻扩机、全套管钻机(即贝诺特钻机)。
1.全叶螺旋钻孔机全叶螺旋钻孔机(图2—18)由主机、滑轮组、螺旋钻杆、钻头、滑动支架、出土装置等组成,用于地下水位以上的粘土、粉土、中密以上的砂土或人工填土土层的成孔,成孔孔径为300mm~800mm,钻孔深度8—12m。
配有多种钻头,以适应不同的土层.图2—18 全叶螺旋钻孔机1一电动机;2一变速器;3一钻杆;4一托架;5一钻头;6一立柱;7一斜撑;8一钢管;9一钻头接头;10一刀板;11一定心尖2.回转钻孔机回转钻孔机由机械动力传动,配以笼头式钻头,可以多档调速或液压无级调速,在泥浆护壁条件下,慢速钻进排渣成孔,灌注混凝土成桩。
设备性能可靠,噪音振动小,钻进效率高,钻孔质量好。
该机的最大钻孔直径可达2.5 m,钻进深度可达50—100 m,适用于碎石类土、砂土、粘性土、粉土、强风化岩、软质与硬质岩层等多种地质条件。
3.潜水钻机潜水钻机(图2—19、2—20)适用于粘性土、粘土、淤泥、淤泥质土、砂土、强风化岩、软质岩层,不宜用于碎石土层中。
这种钻机以潜水电动机作动力,工作时动力装置潜在孔底,耗用动力小,钻孔效率高,电动机防水性能好,运转时温升较低,过载能力强,钻架对场地承载力要求低,可采用正循环、反循环两种方式排渣。
动力猫道装置的研制与应用
60目前动力猫道装置主要有绞车提升式、油缸举升式和直推式3种形式。
其中,提升式和油缸举升式动力猫道基本原理相同,均利用提升输送装置至钻台完成管柱输送,仅是驱动方式不同,现场应用较多、技术相对成熟。
直推式动力猫道采用无运动输送架方式将管柱输送到钻台,位置靠近鼠洞处,工作效率高、节能效果好,主要适用于10m以上钻台,未见现场应用报道。
本文介绍的动力猫道装置,是由胜利石油工程公司钻井工艺研究院自主研发,采用绞车提升式的驱动原理,目前已经形成系列化产品,适用于ZJ30-ZJ90钻机,且在现场推广应用,应用效果良好。
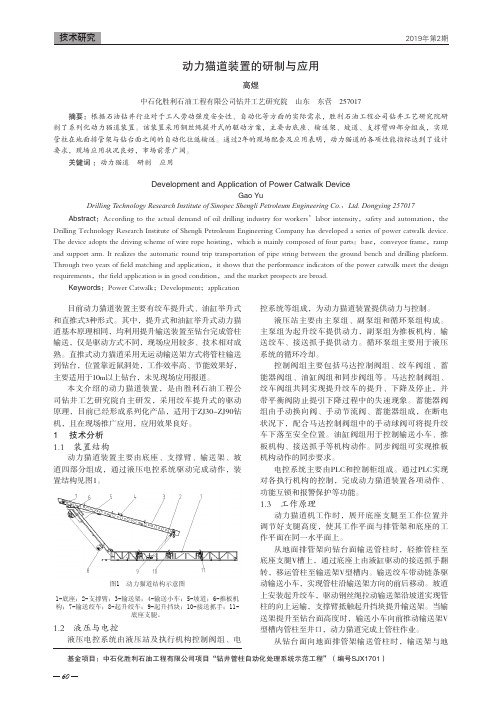
1 技术分析1.1 装置结构动力猫道装置主要由底座、支撑臂、输送架、坡道四部分组成,通过液压电控系统驱动完成动作,装置结构见图1。
图1 动力猫道结构示意图1-底座;2-支撑臂;3-输送架;4-输送小车;5-坡道;6-推板机构;7-输送绞车;8-起升绞车;9-起升挡块;10-接送抓手;11-底座支腿。
1.2 液压与电控液压电控系统由液压站及执行机构控制阀组、电控系统等组成,为动力猫道装置提供动力与控制。
液压站主要由主泵组、副泵组和循环泵组构成。
主泵组为起升绞车提供动力,副泵组为推板机构、输送绞车、接送抓手提供动力。
循环泵组主要用于液压系统的循环冷却。
控制阀组主要包括马达控制阀组、绞车阀组、蓄能器阀组、油缸阀组和同步阀组等。
马达控制阀组、绞车阀组共同实现提升绞车的提升、下降及停止,并带平衡阀防止提引下降过程中的失速现象。
蓄能器阀组由手动换向阀、手动节流阀、蓄能器组成,在断电状况下,配合马达控制阀组中的手动球阀可将提升绞车下落至安全位置。
油缸阀组用于控制输送小车、推板机构、接送抓手等机构动作。
同步阀组可实现推板机构动作的同步要求。
电控系统主要由PLC和控制柜组成。
通过PLC实现对各执行机构的控制,完成动力猫道装置各项动作、功能互锁和报警保护等功能。
1.3 工作原理动力猫道机工作时,展开底座支腿至工作位置并调节好支腿高度,使其工作平面与排管架和底座的工作平面在同一水平面上。
履带式双臂锚杆钻车的研究与设计

(作者单位:江苏中贵重工有限公司)◎王兴文履带式双臂锚杆钻车的研究与设计由于煤矿、巷道施工的特殊性,所以会经常采取钻爆法与机掘法,其中机掘法是最常用的一种方法,尤其是在履带式双臂锚杆钻车研发出来之后,该机械设备立刻成为相关施工作业的首选装备。
履带式双臂锚杆钻车,为全液压驱动,控制方式可以分为手动、半自动和全自动,现在该设备已经得到广泛的普及。
一、履带式双臂锚杆钻车概述1.履带式双臂锚杆钻车。
履带式双臂锚杆钻车,已经是煤矿、巷道施工中的重要工具,不但改善了支护效果、降低支护成本,还能加快施工速度,从而提高施工的效率,另外该设备对巷道的断面利用率非常高,所以在使用上有着明显的优势。
目前锚杆钻车有很多类型,一般会以锚杆钻机的数量进行划分,也就是单臂、多臂锚杆钻车,多臂又分为双臂和四臂等其中最常用的就是双臂锚杆钻车。
该设备结构简单,并且体积非常小,所以使用起来安全性更高,通过升降装置与钻臂变位机构配合动作,可以进行巷道内不同高度不同角度锚杆、锚索打孔的施工作业。
2.履带式双臂锚杆钻车设计原则。
为了能够满足各环境的施工作业,履带式双臂锚杆钻车在设计上要遵守很多原则,这样才能进行锚杆、支护作业,并且要针对施工现场做综合性的考虑。
首先是结构布局必须要紧凑,这是为了能够在狭小的地形内进行施工,而且在两台设备交叉作业时,也能更灵活的调整,避免相互之间无法错车的问题出现。
临时支护装置,能够有效保证相关人员的安全。
二、履带式双臂锚杆钻车使用优势1.施工安全系数得到提高。
任何机械设备在使用过程中,安全性永远都是第一位,履带式双臂锚杆钻车,在安全性上面有足够的保障。
由于设置了可移动、伸缩式的超前临时支护机构,所以施工人员会站在具有防护效果的顶板下进行作业,这样就提高了安全系数,避免施工人员站在空顶下作业,引发安全事故问题。
其次临时支护机构,还拥有托举网片的功能,很多没有使用锚杆钻机的施工单位,都是人员站在空顶下用手临时托举网片,这种方法无疑存在很大的安全隐患面,而托举网片的功能,可以有效避免人工托举网片,同时还减少了施工人员的工作量,当然最重要的是安全性比较高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
钻机移动装置制造工艺的研究
【摘 要】经过对移动装置实际生产过程的研究与总结,编制出
了合理的生产工艺。基本的工艺流程:进料检验→下料领料→h钢
焊接→h钢加工修整→片架焊接→片架吹砂→片架加工→检验→片
架整体衍装→片架横梁找正→焊接→检验→出厂试验→涂装→出
厂检验。
【关键词】移动装置;制造工艺;缺陷
1 进料检验、防腐处理
1.1 板材表面不得有明显的缺陷,不得有明显的凹凸物;凹凸变
形面积小于4cm2;
1.2 型钢及管材1米内弯曲不大于±2mm、总体变形不大于±3mm;
1.3 钢材边沿的飞边毛刺、凹坑、夹层等钢材表面缺陷用砂轮或
焊接修整;
1.4 并对不合格的材料进行隔离并标识。
2 下料及领料
2.1 熟悉图纸、熟悉工艺,必须弄懂弄通。
2.2 领料下料。持相关技术文件进行领料,材料部门按照10%~
15%的损耗计算给料量;施工人员不得无故超量领料,确需超量的
由技术人员签字认可;
2.3 如领料后发现材料有缺陷,则需要对材料进行矫直、矫平。
2.4 薄板使用剪板机下料,(20-50mm)中厚板使用仿型切割或数
控下料,气割下料应清理切口,表面打磨平整。腹板两侧打坡口,
采用半自动打45度坡口,底边留3mm,并用砂轮清理表面氧化皮直
到露出金属光泽。
2.5 型钢下料尽量使用锯床,如需气割下料则长度允差±5mm,
割口表面打磨平整。
2.6 砂轮修光各种毛刺;
2.7 加工件必须将毛刺清理干净,加工表面涂防锈油处理。
3 h钢焊接
3.1 按图纸标准要求对接
(1)长度允差±1mm,宽度允差±3。
(2)对角线误差不大于±5mm。
(3)在翼板上划腹板装配线,在装配胎架上依次装配翼板和腹
板,一端对齐注意,保证h高度尺寸为h+1-·2mm,打磨焊缝区域,
用角钢做支撑,控制焊接时的变形。
(4)h形钢对接的工作程序分两步:第一步将两翼板放入组对机
中,第二步将腹板放入组对机对中组成i形,四角点焊,中间点焊
两道,点焊长50mm。
(5)自动埋弧焊前,将h钢的四条纵向角焊变为船形焊,以保
证焊缝的焊透,提高焊接质量,先用二氧化碳保护焊机进行打底焊,
四条焊缝的焊接方向应一致,控制电流保证焊透。
(6)采用埋弧自动焊焊接角焊缝,为防止h扭曲,四条角焊缝
的焊接方向应一致。h焊接时应控制焊接变形,多层焊接时应多次
翻身施焊。
3.2 焊接变形的控制
自动埋弧焊电流大,热量高,构件易产生变形(翼缘板角变形;
h 钢的纵向弯曲;h钢扭曲变形)。
(1)针对焊接工作的需要制作了一个专用的工作台,这是对焊
接变形的第一步控制。
(2)根据翼缘板与腹板的不同配置调整焊接参数,将角变形控
制在1mm以内。
(3)纵向弯曲是由于h型钢单边受热产生的残余应力分布不均
造成的。可以利用后续焊缝的残余应力平衡上道焊缝的残余应力的
办法,即第1、2道焊缝焊接时,电流调至下限 值,第3道焊缝焊
接时,电流调至平均值,在最后一道焊缝焊接时,将电流调至上限
值,以期消除变形。如采用上述措施后仍有少量变形,则在后续工
序中用火焰法予以校正。
(4)扭曲变形与纵向弯曲产生的原因大致相同。因此,也是通
过合理调整焊接顺序,以后续焊缝的残余应力来平衡前面的焊接残
余应力。
3.3 h钢变形的校正
主要采用三种方法:火焰校正法、机械校正法和反变形法。
(1)机械校正法主要校正翼缘板的角变形,在专用的翼缘矫正
机上,通过机械力进行反复的强制性校正,直到角变形量符合标准
为止。
(2)火焰校正法主要用于校正h钢的纵向弯曲变形,在拱起的
一侧用火焰加热至850℃~900℃,在翼缘板上进行条形加热,在腹
板上进行三角形区加热,加热后用冷水进行跟踪冷却。加热时根据
不同的变形量,控制加热区的大小和加热的温度,以防校正过量和
出现过烧现象。
(3)反变形法用于控制端头板焊接变形。在端头板焊接前,在
施焊部位的反面用大号气焊枪进行烘烤,产生残余应力,待正式施
焊时达到焊接残余应力平衡。最终实现端头板的平整。
4 h钢加工
在h钢校完形后,转至加工进行初加工,加工内容为平端面,钻
孔。
4.1 平端面:制作镗床支架和镗刀工具板;h钢上镗床时要找平
上紧,保证端面与底面的垂直度,总长度的范围误在±1mm。
4.2 钻孔:以已经加工完的端面为垂直基准,以工作台面为水平
基准,进行划线找孔。孔间距误差控制在±0.1mm。
5 片架组焊
5.1 放样:用1:1的比例在装配平台上放出构件实样,然后根
据片架图纸,划出外轮廓线,保证对角线误差不大于5mm,吊入焊
接h钢,用压板紧固。
5.2 组对:250h钢下料,保证与焊接h钢的对接缝隙小于5mm,
缝隙过大不能用钢条进行塞焊。必须打磨见光后,堆焊后再进行施
焊。
5.3 样板固定:第一组点焊完成后,再进行第二次校核,确定总
体尺寸在允许的范围内,在平台上主要控制位置上加限位块。
5.4 组焊:对已组对的片架进行焊接,将可以焊接的焊缝全部焊
完,保证片架不会出现的散开的情况下,可以吊出,进行一件片架
的组对。片架焊接时,尽可能的将片架焊缝置于水平位置焊接,以
保证焊缝的质量和熔深。
5.5 单片架组焊完成后则应立即进行喷砂喷底漆处理。
5.6 横梁焊接:在平台上放样,并制作标准样板。按图下料,在
胎具上统一组焊,保证耳板孔的位置一致。
5.7 片架方孔割削:用半自动下料工具,将轨道与方孔的直线度
进行找正。气焊切割前先用半自动小跑车沿烽线方向进行找正,及
时修正不符合之处。一次切割不要切割太多,最好不要超过2个孔。
每两个孔割完后要对割枪口进行输通,保证烽线的形态;割口以平
整美观为准。每割完一个孔必须测量方孔的尺寸大小是150×75,
允许误差在±2mm,割口不平处应用砂轮进行修整。
6 整体衍装
6.1 清理出够大的场地,按总装图中的顺序进行摆放,保证左、
右轨道的距离符合图纸的尺寸,总体摆放完成后,拉对角线尺寸,
对角线尺寸误差不大于10mm。
6.2 轨道上平面抄平,用水平仪进行上平面抄平,各片架的高度
误差不大于0.5mm。
6.3 拉线找正轨道的直线度,从前端到后端的两点间拉线,进行
轨道的找正。直线度误差不能大于2mm。
6.4 在保证以上安装位置要求的情况下,各片架间的间隙控制在
2mm以内。
6.5 各片架按以上要求组装完成后,采取临时固定措施,以保证
在焊接耳板时不会出现错对的情况。
6.6 耳板焊接:在联接组对完成后,进行耳板焊接;包括横梁耳
板焊接和联接耳板焊接。
(1)横梁耳板焊接:备齐已加工好的联接销子和耳板以及焊接
完成后的横梁,将配件装配好后,按图纸规定的尺寸找好耳板位置,
划好线进行焊接;先点焊,后加强焊。
(2)联接耳板焊接:备齐已加工好的联接销子和耳板,将耳板、
销子与片架销孔装配好后,控制好联接耳板与片架的间隙;先点焊,
后加强焊。也可以先加工好两件工装螺栓和调整垫片,尽量保证各
片架间的联接耳板与片架间隙大小一致。
6.7 耳板焊接时,采取先点焊,后加强焊的顺序。点焊加多焊一
些以保证耳板的联接强度,从而保证在拆装后加强焊进耳板不错
位。
6.8 焊接序号:按总装图中的序号将各序号焊到各片架和横梁和
附件上。保证序号焊接牢固,位置选在不易磕碰,容易看到的位置。
7 解体
7.1 在组对完成片架并且全部的耳板组对完成后,进行可以拆
解。拆解后,各部需加强焊的部位,尽可能的进行水平焊接,以保
证焊接强度和表面焊接质量。
7.2 全部焊接完成后,进行喷吹砂处理。
8 喷漆要求
按有关涂装工艺规范进行涂装,底漆+中间漆+面漆。
[责任编辑:王迎迎]