基于MATLAB的注塑机五支铰斜排双曲肘合模系统优化设计
毕业设计(论文)-基于Matlab的槽轮机构优化设计
第一章绪论槽轮机构由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
槽轮机构结构简单,易加工,工作可靠,转角准确,机械效率高。
但是其动程不可调节,转角不能太小,槽轮在起、停时的加速度大,有冲击,并随着转速的增加或槽轮槽数的减少而加剧,故不宜用于高速。
槽轮机构有外啮合和内啮合两种形式。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同。
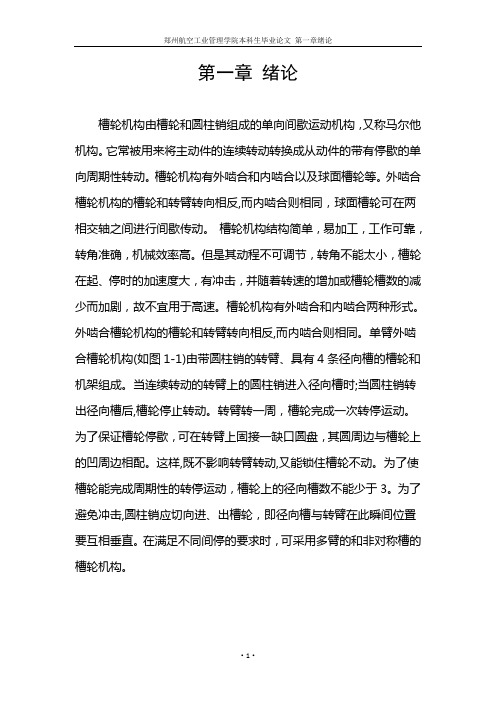
单臂外啮合槽轮机构(如图1-1)由带圆柱销的转臂、具有4条径向槽的槽轮和机架组成。
当连续转动的转臂上的圆柱销进入径向槽时;当圆柱销转出径向槽后,槽轮停止转动。
转臂转一周,槽轮完成一次转停运动。
为了保证槽轮停歇,可在转臂上固接一缺口圆盘,其圆周边与槽轮上的凹周边相配。
这样,既不影响转臂转动,又能锁住槽轮不动。
为了使槽轮能完成周期性的转停运动,槽轮上的径向槽数不能少于3。
为了避免冲击,圆柱销应切向进、出槽轮,即径向槽与转臂在此瞬间位置要互相垂直。
在满足不同间停的要求时,可采用多臂的和非对称槽的槽轮机构。
图1-11.1 槽轮机构的应用槽轮机构具有结构简单、制造容易、工作可靠和机械效率较高等优点。
但是槽轮机构在工作时有冲击,随着转速的增加及槽数的减少而加剧,故不宜用于高速,其适用范围受到一定的限制。
槽轮机构一般用于转速不是很高的自动机械、轻工机械和仪器仪表中。
例如图1-2a所示的电影放映机中的送片机构。
由槽轮带动胶片,作有停歇的送进,从而形成动态画面。
此外也常与其它机构组合,在自动生产线中作为工件传送或转位机构。
如图1-2b,为蜂窝煤制机模盘转位机构。
图1-2a 电影胶片抓拍机构图1-2b 蜂窝煤制机模盘转位机构1.2 槽轮机构的工作原理槽轮机构的运动特性槽轮机构的主要参数是槽数z 和拨盘圆柱销数k 。
基于Adams五点斜排机构的分析与设计
毕业设计说明书学生姓名:学号:学院:机电工程学院专业年级:题目:指导教师:评阅教师:针对现有注塑机的设计上的合模机构存在移模运动不顺畅,不够理想的情况。
首先用Solidworks对注塑机的双肘五点斜排机构建立模型,进行理论分析,确定该机构实现慢—快—慢的理想运动特性的工作区间。
在一定的条件下进行优化,最后设计一组更优的解。
本课题将全部力量集中在这个关键问题的分析上,严格运用方案设计的求解方法,用三维CAD软件Solidworks建立注塑机合模机构各零件、装配体的实体模型,并利用采用现代虚拟样机技术的运动仿真软件对所选方案进行计算机辅助运动学仿真研究,从本质上解决五点斜排合模机构的效率和可靠性。
关键词注塑机改进优化运动仿真Title Computer Aided DesignAbstractIn a clamping unit of injection molding machine, it has the problem that clamping unit cannot move smoothly and its not satisfy ours mind.First of all,I applied the Solidworks software,set up a numerical model to analyze the moving of clamping unit and its characteristic for searching the reasons.Based on the characteristic of joint—double five—point toggle clamping unit,we established its optimum model, analyzed its characteristic.For testing and verify the results,we applied the Adams software to set up the three dimensional model of clamping unit and to simulate its moving。
基于MATLAB的悬置系统优化设计及软件开发
基于MATLAB的悬置系统优化设计及软件开发悬置系统优化设计及软件开发是一个重要的领域,它涉及到机械工程、控制工程、计算机科学等多个学科。
本篇文章将基于MATLAB,介绍一种悬置系统优化设计及软件开发的方法。
1. 悬置系统优化设计悬置系统是指一种涉及到悬浮力、摩擦力和质量等多个因素的机械系统。
它通常是由一个悬置系统模型和一个控制器模型组成。
悬置系统模型可以描述悬浮力、摩擦力和质量等因素对系统性能的影响,从而进行优化设计。
在悬置系统优化设计中,重要的一步是通过建立系统模型,计算系统的动态响应。
MATLAB是一种功能强大的数值计算和科学绘图软件,可以帮助我们方便地计算系统响应。
我们可以利用MATLAB中的ODE solver函数来模拟悬置系统动态响应,对系统进行优化设计。
2. 悬置系统软件开发在悬置系统软件开发中,需要设计一个稳定、高效、易于使用的软件,以实现系统的实时监测和控制。
MATLAB是开发悬置系统软件的一个优秀选择。
首先,我们可以使用MATLAB提供的GUI(图形用户界面)开发工具,创建一个用户友好的界面,以方便用户进行操作。
其次,我们可以将悬置系统模型和控制器模型集成到开发的软件中,实现实时的系统监测和控制。
3. 总结综上所述,基于MATLAB的悬置系统优化设计及软件开发方法是一种高效、易于实现的方法。
它可以帮助我们快速优化悬置系统性能,同时还可以方便地开发一个用户友好的软件,实现实时监测和控制。
对于悬置系统优化设计及软件开发工程师来说,掌握MATLAB技术是非常重要的。
4. 悬置系统优化设计算法悬置系统的优化设计可通过多种优化算法来实现,如遗传算法、粒子群算法和蚁群算法等。
这些算法都是基于数值优化和搜寻的思想,通过不断迭代优化的方式寻找最优解。
在MATLAB中,我们可以使用优化工具箱提供的函数实现悬置系统优化设计。
具体来说,我们需要定义目标函数和约束条件,然后使用优化函数求解最优解。
例如,使用fmincon函数可以实现非线性优化,使用linprog函数可以实现线性优化等。
基于Moldflow的浇注过程流动分析及浇注系统优化设计
基于Moldflow的浇注过程流动分析及浇注系统优化设计基于Moldflow的浇注过程流动分析及浇注系统优化设计第 I 页摘要针对注塑件在实际生产中所产生的气孔、熔接痕、翘曲等问题,利用有限元理论,运用Moldflow软件对气动扳手壳体的几种浇注系统进行填充时间、气孔、熔接痕、翘曲等分析的过程模拟,直观体现熔融塑料在型腔内的变化过程。
比较分析结果表明,选择充型均匀、平稳,熔接痕深度较浅,翘曲较小的浇注系统为最佳设计方案。
关键词: Moldflow,塑料,注射成型基于Moldflow的浇注过程流动分析及浇注系统优化设计第 II 页AbstractAim at the problems with injection molding parts,such as airtraps,weld line and warp,based on finite-element theory,the software of Moldflow was used to simulate the filling time,weld line and warp of the three runner system for the plastic car-inside decorativecover(The changing process of plastic in the cavity wasvisualized(By analyzing the results,a runner system project with even and stable filling,shallow weld line and small curling was chosen(Keywords: Moldflow,plastic,injection molding基于Moldflow的浇注过程流动分析及浇注系统优化设计第 III 页目录1 引言 (1)1.1 研究背景.......................................................................................... 1 1.2 研究意义 (1)1.3 发展趋势…………………………………………………………………………… 1-2………………………………………………… 3 2 注射成型模拟过程的理论基础2.1 注塑成型原理………………………………………………………………………… 3 2.2 塑料的塑化…………………………………………………………………………… 3 2.3 螺杆式塑化过程…………………………………………………………………… 3-4 2.4 注塑过程…………………………………………………………………………… 4-6 2.5 注塑CAE技术理论…………………………………………………………………… 6 3 气动扳手壳体注射成型浇口分析……………………………………………… 73.1 产品成型条件……………………………………………………………………… 7-9 3.2 进浇位置分析………………………………………………………………………9-10 4 气动扳手壳体注射成型方案优化………………………………………………114.1 冷却系统设计…………………………………………………………………………11 4.2 浇注系统设计方案……………………………………………………………… 12-14 4.3 模流分析结果比较……………………………………………………………… 14-23 5 结论……………………………………………………………………………………24 参考文献………………………………………………………………………………25-26 致谢………………………………………………………………………………………27基于Moldflow的浇注过程流动分析及浇注系统优化设计第 1 页1 引言1.1 研究背景注射成型是聚合物材料的主要加工方法之一,其生产效率高,能成型外形复杂、尺寸精确或带嵌件的塑料件。
全电动注塑机混合驱动式合模机构优化分析
有 注 塑机 合模 系统 的基 础上 ,创 新性 地将 混合 驱动 机 构与全 电动注 塑机 合模 机构 结合 ,研 发 出一种 全 电动 注塑 机混 合驱 动式 合模 机构 ,由大 功率 常规 电机取 代 原有 大功 率伺 服 电机 ,与小 功率 伺 服 电机 共 同驱 动合
由于液 压 驱 动 双 曲肘 斜 排 列 七 支 点 合 模 机 构 具 有 超大行 程 比、锁 模 刚性特 性优 越 、移 模 速度高 且 稳 定 等优 势 ,本文 根据 全 电动 注塑 机 的设 计要 求 ,将
Abta t o ep roeo edn ptevl i f hfn d fa ‘lc i i et nmo ig s c:F rt up s fs e igu h eo t o ii moeo l e tc n ci l n r h p cy s t g l e r j o d
第 4 第 4期 0卷 21 0 2年 4月
塑 料 工 业
CHI NA LAS CS NDUS P TI I TRY
全 电动 注 塑 机 混 合 驱 动 式 合 模 机构 优 化 分析
边旭 东 ,伍 先安 ,谢鹏 程 ,丁 玉梅 ,杨 卫 民
( 京 化 工 大 学 机 电工 程 学 院 ,北 京 10 2 ) 北 0 0 9 摘 要 : 以加 快 合 模 机 构 移 模 速 度 和 优 化 移 模 速度 曲 线 为 目的 ,优 化 设 计 出一 种 新 型 混 合 驱 动 式 合 模 机 构 ,并 对 该
mai sa d d n mis e c e e h x si l—l crc h b i 。 rv n c a i g sr t r . tc n y a c x e d d t e e it ng alee ti y rd d e lmp n tucu e i
matlab机械优化设计应用实例
一维优化问题
一维优化问题的数学模型为:
min
具体的调用格式如下: 调用格式1:
f ( x)
x1 x x2
在matlab中,一维优化问题,也就是一维搜索问题的实现是由函数fminbnd 来实现的。
调用方式二: 在命令窗口中输入: [x,fval]=fminsearch(@demfun1,[0,0]) 得到的结果 X= 1.0016 0.8335 Fval= -3.3241
约束优化问题
1.线性规划
f=[-7;-5]; A=[3,2;4,6;0,7]; b=[90;200;210]; lb=zeros(2,1); 调用linprog函数 [x,fval]=linprog(f,A,b,[],[],lb)
方法二:在MATLAB的M编辑器中建立函数文件用来保存所要 求解最小值的函数:
function f=demfun1(x) f= 2*x(1)^3+4*x(1)*x(2)^3-10*x(1)*x(2)+x(2)^2; 保存为demfun1.m。
然后,在命令窗口中调用该函数,这里有两种调用方式:
调用方式一: 在命令窗口中输入: [x,fval]=fminsearch('demfun1',[0,0])
调用格式2:[X,FVAL]=fminunc(FUN,X0) 这种格式的功能是:同时返回解x和在点x处的目标函数值。
1. 求函数F=sin(x)+3的最小值点。
function f=demfun(x) f=sin(x)+3 然后,在命令窗口中输入: X=fminunc(@demfun,2)
压铸机双曲肘合模机构参数关系的研究
( o eeo ca ia adEe t nc nie r gC ia nvri esi c sWu a )Wu a 3 0 4 C ia C l g f l Meh ncln lcr iE g ei ,hn ies y f oce e ( h n, h n 0 7 , hn ) o n n U toG n 4
其n nLi Ls
-
L 1
-
维普资讯
机 械 设 计 与 制 造
一
第1 2期
20 0 7年 1 2月
8 2一
Ma h n r De in c iey sg
&
Ma u a t r n f cu e
文章编号 :0 1 39 (0 7 1— o 2 o 10 — 97 2 0 )2 0 8 - 2
也 o( )cs [s c - o( 一 b m
'
)
() 3 () 4
3 O
13扩 力 比 .
:— snt 一 R Lsi( L  ̄ In s( i 肚
_
—
11机构 总长 .
上 r cs /, ,i( ; + o 、 £ ) d E n
・ 来稿 日期 : ̄7 0 —1 2 -1 8
国内外对双曲肘合模机构的研究取得 了一定的成果 ,也得 到不断 的开发和应用 , 目前仍处于不断完善和推广应用当中: 但
一
图 1双曲肘合模机构原理图
方面是推导更为合理 的数学模 型,另一方面是寻求更为有效 的优化方法。 本文就是基于 Ma C D软件对压铸机双 曲肘合模 tA h 机构 的参数关系进行研究 。
12动 模板 行程 、 . 锁模 油 缸行程 及 行程 比
七支点合模机构及其液压驱动的系统的分析及设计的研究
Anay i a d R e e r h o t S se l ss n s a c f r he y t m o h S v n—po n ft e e e — it
液 压 气 动 与 密 封 / 0 1年 第 1 21 1期
七支点合模机构及 其液压驱动的 系统 的分析及设计 的研 究
张友 根
( 宁波 海达塑 料机 械有 限公 司 , 江宁波 浙
摘
350 ) 12 0
要 :双 曲 肘 斜 排 列 七 支 点 合 模 机 构 是 一种 创新 发 明 的 新 颖 的合 模 机 构 , 压 驱 动 系统 基 于肘 杆 机 构 的 特 性 进 行 设 计 , 者 之 间 液 两
Cl m p n e ha im a t e o ig M c ns nd h Hy r u c iv d a h Dr e
Z HANG Y u g n o — e
( igo ad lsc Mahn r o,t. Nn b 3 0 , C ia Nn b H iaPat c iey C .Ld, ig o 2 0 i 1 5 hn )
K y W od : i et n mo i cie t g c mpn eh ns e rs n ci l n mahn ; o l l ig m c ai j o dg ge o m; svn p it aa s n eerh ee — o ; n l i a d rsac n ys
液压驱动双曲肘斜排列七支点合模机构的分析研究
力 比、 锁模力、 速度增益 、 液压驱动等机构主要技术参 数的工程计算原理 、 方法和设计准则 , 并用实例验证 了工程计算准则的可行性 实例研究表明 , 双曲肘斜 排列七支点合模机构 同比双 曲肘五支点合模机构 , 液 压能耗节能3 %, 5 系统液压驱动装载功率下降4 %。 0
引 言
的双曲肘斜排列五支点外翻式合模机构 、 双曲肘斜排
列五支点 内翻式合模机构简 图。图 1 图 3 ~ 上半部是 液压驱动双曲肘斜排列七支点合模机构革新 了 机构处于移模最大行程的极限 , 下半是机构处于移模 常规 的液压驱动双 曲肘 四支点/ 五支点合模 机构 , 具 最 大行 程 的起始 极 限 。
工作 油 流量 之 间 的关 系 ; 出了移 模行 程 、 程 比 、 提 行 增
I l ; 眵模行程 l l l’
1 ( ) 一 锁 模缸 ; 一 合 2 调模机构 ; 一 3调节模板 ( 尾板 ) 4合模 缸活塞杆 ; ;- 5推力座 ; 一 一 6推力座导柱 ; - 7 上摆杆 ; - 8 推力杆 ; - 9连杆 ;0主摆杆 ; 1
1 ( ) 一 锁 模缸 ;一 合 2调模机构 ;一 3调节模板 ( 尾板 )4合模缸活塞杆 ; ;一
5推力座 ;一 一 6连杆 ; 摆杆 ;- 7 - 8肘杆 ;一 9拉杆 ;0 1一 移动模板 ( 二板 ) ; 1- 1 模具 ;2固定模板 ( 1一 头板 ) 1. ;3 拉杆螺母
作 者简介 : 张友根( 9 7) 男 , 14 一 , 教授级高级工程师 , 享受 国务院政府特 殊 津贴 , 主要从事塑料机械 的科学发展工作 。
探讨合模机构及其发展趋势
探讨合模机构及其发展趋势1 概述新形势下,随着科学技术的蓬勃发展,对于合模机构的技术改革和发展也提上了议程。
合模机构主要包括曲肘式合模机构、全液压直压式合模机构、无拉杆式合模机构和二板式合模机构等几种模式。
作为注塑吹塑工艺的主要设备,合模机构能够为工艺合模流程提供足够的合模力、高强度的模板及系统刚性以及进行高速、平稳、低噪音等优异特性的模板运动。
但在目前研究合模机构及其发展方面,国内外所涉及的文献都比较少,加强对合模机构及其发展的探讨很有必要。
2 注塑机合模机构的类别及典型分析2.1 合模机构的类别根据不同的标准划分,合模机构的类别可以从模板数目、传动形式、合模架构及驱动源等几方面进行划分。
根据模板数目分类,合模机构可以分为三板式和二板式两种。
三板式包括曲肘式和复合稳压式,二板式包括直压式、复合稳压式和无拉杆式等。
若按照传动形式分类,则有全机械式、机械连杆式、全液压直压式及液压机械式等几种,其中,全机械式现已淘汰。
2.2 典型合模机构2.2.1 曲肘式合模机构,包括五点双曲肘内翻式和电动曲肘连杆式两种。
五点双曲肘内翻式合模机构主要由合模油缸、曲肘连杆、后模板、动模板、调模装置及顶出机构等构成,具有成本低、维护低、刚性及运动性好等特点,是目前应用最为广泛的一种注塑机合模机构。
其曲肘连杆具有机构力放大、改善运动特性和自锁等功能,但五点双曲肘内翻式合模机构同时存在锁模力稳定性较差、铰链易磨损、调模难度大和机身庞大等缺陷。
电动曲肘连杆式合模机构由伺服电机、同步带、支角、滚珠丝杆、调模装置及曲肘连杆等构成,具有节能环保、低噪音、高精度和响应性能好等特性,是在五点双曲肘内翻式合模机构的基础上发展起来的新合模机构,因此也保留了其原有的缺点,而且还存在伺服电机超载、整机成本高等问题,不利于推广发展。
2.2.2 全液压直压式合模机构。
充液式合模机构是全液压直压式合模机构的典型代表。
主要构成包括锁模油缸和移模油缸两部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB的注塑机五支铰斜排双曲肘合模系统优化设计石绍伟;杜思莹;杜遥雪;徐百平
【期刊名称】《五邑大学学报(自然科学版)》
【年(卷),期】2014(000)004
【摘要】This study analyses the movement characteristics and mechanical properties of the five-hinge diagonal row hyperbolic elbow clamping mechanism of the 80T injection molding machine, establishes the stroke-bore ratio and enlargement of the thrust of the clamping cylinder as the optimization goal, builds the optimization mathematical model of the clamping mechanism, determines the parametric design process, chooses reasonable constraint parameters according to geometry relationship, and uses the MATLAB software to optimize design for the clamping mechanism. After optimization, the stroke-bore ratio improves by 31.91% and the enlargement of the thrust of clamping cylinder by 0.46%. The improved design provides a theoretical basis for reducing the energy consumption of the five-point diagonal row hyperbolic elbow clamping mechanism and improving its working efficiency and the quality of injection molded parts.%对80T注塑机五支铰斜排双曲肘合模机构的运动特性
和力学特性进行分析,确立以行程比和合模油缸推力放大倍数为优化目标,建立合模机构优化数学模型,确定参数化设计流程,并根据几何关系设立合理的约束参数,用MATLAB 软件对合模机构进行优化设计.优化后,该机构行程比提高了31.91%,
合模油缸推力放大倍数提高了0.46%,为降低五点斜排双曲肘合模机构的能耗,
提高工作效率及注塑件的质量提供理论依据.
【总页数】7页(P55-61)
【作者】石绍伟;杜思莹;杜遥雪;徐百平
【作者单位】五邑大学机电工程学院,广东江门 529020;五邑大学机电工程学院,广东江门 529020;五邑大学机电工程学院,广东江门 529020;广东轻工职业技术学院广东高校高分子材料加工工程技术开发中心,广东广州 510300
【正文语种】中文
【中图分类】TH122
【相关文献】
1.注塑机双曲肘合模系统优化设计的研究 [J], 郭策;陈金元
2.塑料注塑机五点斜排双曲肘合模系统特性研究 [J], 陈学锋;徐言生;胡建国;许中明;殷小春
3.注塑机双曲肘斜排列七支点合模机构的设计研究 [J], 张友根
4.注塑机五铰点双曲肘合模机构的分析与研究 [J], 陈金元
5.压铸机双曲肘五铰点斜排列合模机构运动和力学特性分析 [J], 熊万春;金志明;薛平
因版权原因,仅展示原文概要,查看原文内容请购买。