水下自主航行器(AUV)建模仿真研究
基于空间拘束运动模拟的AUV动力学建模与操纵性优化设计
基于空间拘束运动模拟的AUV动力学建模与操纵性优化设计智能水下机器人(Autonomous Underwater Vehicle,AUV)整合了人工智能、信息融合、模式识别、自主控制、系统集成等方面的技术,在众多民用和军事领域都发挥着不可替代的作用。
良好的操纵性是AUV完成各种复杂水下任务并顺利返回的基本保障,操纵性的研究也成为了分析AUV总体性能的重要组成部分。
水下运动特性研究中,掌握操纵运动规律,正确建立动力学模型是开展其他性能分析与改进工作的基础。
在设计初期,结合任务需求对AUV的操纵性进行综合优化,能有效的提高艇体的航行效率和环境适应能力。
本文对AUV的动力学建模方法和基于改善艇型的操纵性优化方法进行研究,主要完成以下工作:对计算流体力学基本方法进行简要介绍,并以SUBOFF潜艇直航阻力为例,对数值模拟中的网格无关性进行研究,为后续的计算分析确定最佳网格方案。
在此基础上利用CFD模拟PMM模型试验方法,对SUBOFF和HEU潜艇模型的水动力系数进行辨识并与试验结果比较,大部分系数的计算误差较小,验证了所选数值计算方法的可靠性。
为了提高AUV的动力学建模效率,提出一种高效的水动力系数辨识方法-空间拘束运动模拟方法。
基于该方法仅需一次计算即可求得空间运动方程中的全部水动力系数。
通过对两个不同特征潜艇的计算分析,验证了新方法的可靠性。
初始动力学模型中系数众多,且部分系数对艇体的运动影响甚微,因此结合显著性检验方法对动力学模型在保证预报精度的前提下进行简化。
根据AUV的运动特征,研究了AUV操纵性的综合评价方法。
该方法包含垂直面运动、水平面运动以及续航力三个方面,综合考虑了各运动的操纵性指标。
并引入了改进的层次分析法,该方法克服了传统评价方法的缺陷,形成了更科学、客观的AUV操纵性能评价方法,避免了仅对单一操纵性指标进行评价的局限性。
受限于水动力系数求取工作的复杂性,鲜少有AUV艇型参数对操纵性指标的灵敏度分析研究。
基于CAN总线的自主水下航行器内部通信与仿真

基于CAN总线的自主水下航行器内部通信与仿真
刘卫东;高立娥;徐建宁;姬岩鹏;丁艺林
【期刊名称】《系统仿真学报》
【年(卷),期】2007(19)6
【摘要】自主水下航行器(AUV)的电气控制部件(ECU)大量采用嵌入式微处理器,系统的功能和性能得到了显著提高,但部件间的互连复杂,影响了AUV部件的兼容性和系统的扩展性。
论述了基于CAN总线的AUV内部互联结构,对基于报文标志符的CAN总线通信原理,以及AUV深度控制半实物仿真系统的结构进行了详细介绍,最后给出了AUV深度控制半实物仿真结果。
【总页数】3页(P1320-1322)
【关键词】AUV;内部互联;CAN总线;半实物仿真
【作者】刘卫东;高立娥;徐建宁;姬岩鹏;丁艺林
【作者单位】西北工业大学航海工程学院
【正文语种】中文
【中图分类】TP36
【相关文献】
1.自主水下航行器内部通讯总线设计* [J], 吕志刚;曹晓霖
2.无人水下航行器控制系统CAN总线通信设计与仿真研究 [J], 徐袭;石敏
3.基于TMS320F2812的水下自主航行器CAN总线通信 [J], 万伟安;吴旭光;王欢
4.基于CAN总线的自主水下航行器分布式控制系统设计 [J], 董权威;王奥博;岳才
谦;王亭亭
5.自主水下航行器内部通信传输信号延时消除方法研究 [J], 张安安
因版权原因,仅展示原文概要,查看原文内容请购买。
自主水下航行器的研究现状与挑战

的 教育 、 学 和 军 事 价 值 。简 要 的 介 绍 了 自主 水 下 航 行 器 的 国 内 外 的 发 展 概 况 , 论 了 自主水 下 航 行 未 来 发 展 所 存 在 的技 术 科 讨
问题 , 探 讨 了 自主水 下 航 行 器 的 未来 发 展 趋 势 。最 后 , 我 国应 采 取 的对 策 与措 施 提 出 了 建议 。 并 就
Vo1 5. .3 NO. 6
J n,01 u 2 0
火 力 与 指 挥 控 制 F r o t l C mma dCo t l i C nr & o e o n n r o
第 3 卷 第 6期 5 21 0 0年 6月
, I l 声
文章 编 号 : 0 2 0 4 ( 0 0 0 — 0 1 0 10 —6 0 2 1 ) 600 —6
o v g ton a d c fna i a i n om m unia i c ton .
国 内外 的 AUV 研 究 现 状
水 下航 行 器作 为 一种 高 技 术 手段 , 海 底 这块 在
人类 未来 极具价 值 的发 展 空间 中起 着至关 重要 的作 用, 发展水 下航行 器 的意义 是显 而易 见 的 。 人们 获取 海洋 数据 的方法 目前是 昂贵且 有限 的[ 。 1 ] 随着 电子 、 算 机 等新 技 术 的飞速 发 展 及 海洋 计
关 键词 : 自主水 下航 行 器 , 航 , 源信 息 融 合 , 航 通 讯 一 体 化 导 多 导
中 图分 类 号 : P 9 T 31 文献标识码 : A
A ur e f A u o m o s U n r t r Ve c e S v y o t no u de wa e hi l
水下机器人的驱动系统仿真--无刷直流电动机simulink仿真.

为了验证所设计的无刷直流电机驱动控制系统仿真模型的 静、动态性能,我们设定电机空载起动,待进入稳态后, 在t=0.5s时加上负载TL=3N· m。
4.2仿真结果及分析: 4.3.1 绕组电流仿真结果
由图示可以看出,在n=1000r/min的参考转速下,电流经 过短暂时间的波动之后,绕组电流值趋近平稳,由于有电 流限幅环节的作用,相电流波动时冲击不大。由于初始阶 段输入转矩为0,电机不对外做功,所以电流值几乎为零 (由于电机中阻尼系数B的存在,电流稍大于零);从 t=0.5s开始,对电机施加转矩为TL=3N· m的负载,电机绕 组中产生周期性的电流,三相电流电角度相差120°,此 时电流产生的电磁转矩与负载转矩及阻尼力之和相平衡。
无刷直流电机有多相结构,可分为半桥驱动和全桥驱动, 全桥驱动又分成星形和角形连接以及不同的通电方式。
3.无刷直流电机驱动系统的建模仿 真
3.1控制策略选择
在开环控制中,转子位置传感器产生的转子位置信号被检 出后,送至转子位置译码电路,经放大和逻辑变换形成正 确的换相顺序信号,去触发、导通相应的功率开关元件, 使之按一定的顺序接通或关断相绕组,从而电机可按一定 的转速旋转。 在闭环控制中,一般是将反映电机的转速信号与预定转速 控制信号相比较、放大后,用其差动量去校正控制对象, 直至控制转速在一定范围内达到平衡。为了进一步改善系 统的稳态和动态性能,通常采用转速、电流双闭环调节器 的控制策略。
3.2无刷直流电机的数学模型
3.2.1绕组电压方程(基尔霍夫电压定律)
利用基尔霍夫电压定律(KVL)可以得到三相绕组的电压 平衡方程:
2.2.2电磁转矩方程
3.2.3无刷直流电机的运动方程为:
AUV拖曳GPS浮标系统仿真研究

朗伯原 理建 立 了拖缆 的三 维运 动数 学模 型 , 在确 定边 界 条件 的基 础 上 , A 对 UV 拖 曳 G S浮标 系 P
统 的 运 动 进 行 了仿 真 , 出 了拖 缆 在 水 中 的姿 态、 缆 上 的 张 力 分 布 , 对 不 同速 度 下拖 缆 对 得 拖 并
AUV 的作 用 力进行 了对 比 , 具有 一定 的工程 实用价值 。 关 键 词: 自主 水 下航 行 器 , 拖缆 , P G S浮标
必 须 定 期 上 浮 到 近 水 面 并 由 动 力 定 位 系 统 控 制
AUV 悬 停 , 将 消 耗 AUV 的 能 量 , 低 AUV 的 这 降
航程, 而且 在 近水 面 AUV 受 海 洋环 境 力 的影 响 控 制 难度 较 大 。针 对 以上 问题 , 文提 出一种 新 的对 本
程 式[ 1 ÷ + + + F + 日 = 0 () 1
1 拖 曳 系统 三 维 运 动 数 学模 型 的建 立
收 稿 日期 :0 7O一 7 2 0 一l1
作者简介 : 晓旭 (9 1 , 杜 1 8 一)西北工业大学博士生 , 主要从事水下航行器操纵性设计与仿真 的研究 。
中图分 类号 : 3 TP 9
文献标识 码 : A
文章编 号 :0 02 5 (0 8 0 — 0 80 10—78 20 )108—5 A UV 拖 曳 G S浮标 系统 如 图 1所示 , 缆 长 P 拖 为 L, 其上 端与 GP S浮标 相连 , 下端连 接于 AUV 的 尾部( P点 ) 。
体阻力 。 ( )拖缆 在水 中的 重力 1
( )流体 阻力 4
对 于 圆截 面 的 拖 缆 , 长后 单 位缆 长 的 阻力表 伸
无缆自治水下机器人
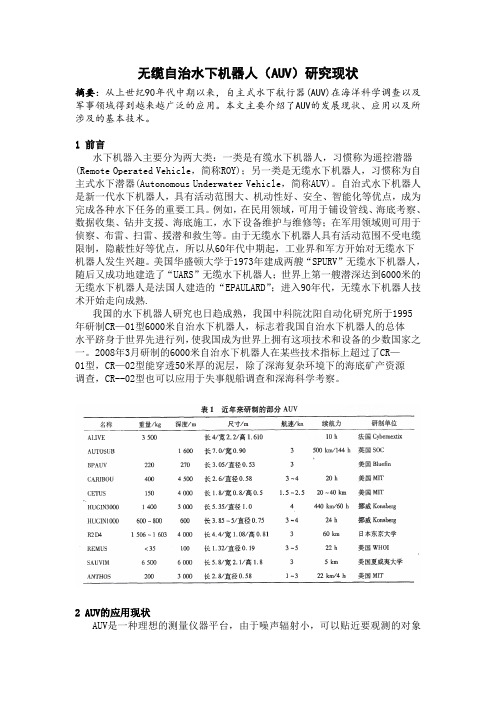
无缆自治水下机器人(AUV)研究现状摘要:从上世纪90年代中期以来,自主式水下航行器(AUV)在海洋科学调查以及军事领域得到越来越广泛的应用。
本文主要介绍了AUV的发展现状、应用以及所涉及的基本技术。
1 前言水下机器入主要分为两大类:一类是有缆水下机器人,习惯称为遥控潜器(Remote Operated Vehicle,简称ROY);另一类是无缆水下机器人,习惯称为自主式水下潜器(Autonomous Underwater Vehicle,简称AUV)。
自治式水下机器人是新一代水下机器人,具有活动范围大、机动性好、安全、智能化等优点,成为完成各种水下任务的重要工具。
例如,在民用领域,可用于铺设管线、海底考察、数据收集、钻井支援、海底施工,水下设备维护与维修等;在军用领域则可用于侦察、布雷、扫雷、援潜和救生等。
由于无缆水下机器人具有活动范围不受电缆限制,隐蔽性好等优点,所以从60年代中期起,工业界和军方开始对无缆水下机器人发生兴趣。
美国华盛顿大学于1973年建成两艘“SPURV”无缆水下机器人,随后又成功地建造了“UARS”无缆水下机器人;世界上第一艘潜深达到6000米的无缆水下机器人是法国人建造的“EPAULARD”;进入90年代,无缆水下机器人技术开始走向成熟.我国的水下机器人研究也日趋成熟,我国中科院沈阳自动化研究所于1995 年研制CR—01型6000米自治水下机器人,标志着我国自治水下机器人的总体水平跻身于世界先进行列,使我国成为世界上拥有这项技术和设备的少数国家之一。
2008年3月研制的6000米自治水下机器人在某些技术指标上超过了CR—01型,CR—02型能穿透50米厚的泥层,除了深海复杂环境下的海底矿产资源调查,CR--02型也可以应用于失事舰船调查和深海科学考察。
2 AUV的应用现状AUV是一种理想的测量仪器平台,由于噪声辐射小,可以贴近要观测的对象(如以设定高度进行海底地形跟踪),因而可以获取采用常规手段不能获取的高质量数据和图像。
欠驱动自主水下航行器移动式回收控制及视景仿真
欠驱动自主水下航行器移动式回收控制及视景仿真在现代科技的不断发展中,水下航行器已经成为海洋探测和海洋资源开发的重要工具。
然而,传统的水下航行器往往受到驱动方式的限制,无法自主进行移动和回收。
为了解决这一问题,研究人员提出了欠驱动自主水下航行器移动式回收控制及视景仿真技术。
欠驱动自主水下航行器移动式回收控制技术主要通过布置在航行器周围的多个推进器来实现。
这些推进器根据控制算法的指令,通过变化推力的大小和方向来控制航行器的运动。
由于推进器数量有限,航行器无法在所有方向上实现精确的控制。
因此,欠驱动自主水下航行器对控制技术的要求较高,需要通过仿真来提前预测和验证控制策略的有效性。
为了实现欠驱动自主水下航行器的移动式回收控制,研究人员首先需要建立合适的控制算法。
这些算法需要考虑到航行器的动态特性、环境参数以及目标移动路径等因素。
通过使用动力学模型和控制理论,研究人员可以设计出适应不同工况和任务的控制策略。
这些策略可以通过计算机仿真来验证其有效性和稳定性。
视景仿真在欠驱动自主水下航行器移动式回收控制中起着至关重要的作用。
通过视景仿真技术,研究人员可以在虚拟环境中创建各种场景,模拟水下航行器的运动和环境响应。
这样可以有效地验证控制策略的可行性,并对其性能进行评估和优化。
此外,视景仿真还可以帮助研究人员分析航行器与环境的交互,优化推进器布置和控制算法,提高水下航行器的运动性能和稳定性。
在实际应用中,欠驱动自主水下航行器移动式回收控制技术有着广泛的应用前景。
例如,在海洋资源开发中,水下航行器可以完成对海底资源的勘探、采集和监测任务。
在海洋环境监测中,水下航行器可以携带各种传感器进行水质、海洋生物和海底地形等方面的监测工作。
此外,水下航行器还可以应用于海底考古和海底科学研究等领域。
综上所述,欠驱动自主水下航行器移动式回收控制及视景仿真技术是一项具有很大潜力的技术。
通过合理设计的控制算法和视景仿真技术的支持,水下航行器可以在水下环境中自主进行移动和回收,完成各种海洋勘探和海洋资源开发任务。
AUV拖曳GPS浮标系统仿真研究
AUV拖曳GPS浮标系统仿真研究
杜晓旭;宋保维;胡海豹;毛昭勇;邵成
【期刊名称】《西北工业大学学报》
【年(卷),期】2008(026)001
【摘要】提出了一种运用拖曳GPS浮标进行自主水下航行器(简称AUV)辅助导航的方案,运用达朗伯原理建立了拖缆的三维运动数学模型,在确定边界条件的基础上,对AUV拖曳GPS浮标系统的运动进行了仿真,得出了拖缆在水中的姿态、拖缆上的张力分布,并对不同速度下拖缆对AUV的作用力进行了对比,具有一定的工程实用价值.
【总页数】5页(P88-92)
【作者】杜晓旭;宋保维;胡海豹;毛昭勇;邵成
【作者单位】西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072
【正文语种】中文
【中图分类】TP39
【相关文献】
1.拖曳式浮标海面尾迹图像仿真研究 [J], 刘岩;王永生;刘翠海;孙华庆;郝晓虎
2.一种基于单移动GPS智能浮标的AUV导航方法 [J], 张加全;刘明雍;李闻白
3.GPS系统仿真和软件GPS接收机的研究 [J], 杨俊;武奇生
4.单测试质量无拖曳卫星无拖曳及姿态系统仿真及其控制研究 [J], 李洪银;胡明
5.面向AUV自主回收的拖曳装置水动力特性研究 [J], 唐东生;谷海涛;冯萌萌;孟令帅;陈佳伦;高伟
因版权原因,仅展示原文概要,查看原文内容请购买。
水下无人航行器高速航行下的运动特性及仿真控制研究
水下无人航行器高速航行下的运动特性及仿真控制研究
王磊;任梦晨;张占阳;李德军;张伟;杨青松
【期刊名称】《舰船科学技术》
【年(卷),期】2024(46)6
【摘要】水下无人航行器具有水下活动范围大、机动性好优点,主要用于大范围地形地貌勘探,水下高速长航程航行时,水下航行器运动特性和姿态控制是研究重点。
本文建立水下航行器垂直面航行运动模型,分析高速航行下的运动特性。
为保证高速航行高效稳定,提出PID方法控制纵倾和滑模方法控制深度的组合控制策略。
通过仿真试验,开展高速航行运动仿真研究。
研究结果表明,在高速航行下,水下航行器会产生一定纵倾,且随着航速增加,纵倾影响会越大,高速状态放大了水下航行器外形上下轻微不对称的特性,诱导产生的垂向水动力及力矩增大,进而引起纵倾;在高速航行条件下,水下航行器能稳定保持定深度长距离航行,控制策略具有很好的适用性。
【总页数】4页(P86-89)
【作者】王磊;任梦晨;张占阳;李德军;张伟;杨青松
【作者单位】中国船舶科学研究中心;深海载人装备国家重点实验室;深海技术科学太湖实验室;上海交通大学
【正文语种】中文
【中图分类】U674.941
【相关文献】
1.无人水下航行器控制系统CAN总线通信设计与仿真研究
2.基于鲁棒滑模控制的水下航行器运动控制仿真研究
3.无人水下航行器分布式运动控制系统设计与仿真验证
4.四旋翼碟形自主水下航行器运动方程建立与流体特性仿真研究
5.Unity3D 无人航行器水下自主航行三维仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
水翼法推进的仿生AUV研制及实验
水翼法推进的仿生AUV研制及实验随着科技的不断发展,水下机器人在海洋资源勘探、教育、环境保护等领域发挥着越来越重要的作用。
而仿生学作为一门跨学科综合性的学科,也在水下机器人研究中得到了广泛应用。
本文介绍的是一种采用水翼法推进的仿生AUV,包括其研制过程和实验结果。
一、研制过程1. 设计原理仿生学中的鱼类水平移动是通过振动鳍鳍膜来完成的。
水翼法推进是将鱼类水平移动的原理转化为机械运动,使用机械运动来模拟水动力学,以提高AUV的效率。
水翼法推进采用两片水翼齐刻,倾斜角度相对大的设计,同时采用对称式,使得AUV的灵活性更高。
通过控制两片水翼的相位差,从而达到前后推进和转变航向方向的效果。
2. 实验过程在研发过程中,我们采用仿真软件对AUV进行设计和仿真。
首先,我们建立了AUV三维模型,并将水翼法推进的结构设计进去。
然后,通过改变水翼的相位差和倾斜角度等参数,在仿真软件中进行模拟实验。
最终获得了合适的设计参数。
接下来,我们开始进行实际的试验。
在试验过程中,我们选择了一个足够大的水池,并将AUV放入水池中。
通过遥控,我们控制了AUV的前后推进和左右方向的调整,并测量了其运动速度、转向精度等性能指标。
实验结果表明,我们的水翼法推进AUV可以通过相位差的控制,轻松地实现前后推进和转变方向的操作,而且具有高速度、更好的灵活性和稳定性等优点。
二、实验结果经过实验,我们获得了以下几点成果:1. 水翼法推进的仿生AUV结构设计得到实现。
2. 实现了水翼法推进的简单控制系统。
3. 实验结果表明,水翼法推进的仿生AUV可以实现较高速度、稳定性和优秀的灵活性。
通过本次实验,我们进一步验证了水翼法推进在仿生AUV中的应用优势,这对于进一步推进水下机器人的研发将具有一定的意义。
在水翼法推进的仿生AUV研制及实验中,需要对相关数据进行采集和分析,以评估其性能表现。
以下将列出所涉及到的数据并进行分析。
1.速度数据在实验中,我们通过计时器和距离测量仪器,测量了水翼法推进的仿生AUV运动的速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水下自主航行器(AUV)建模仿真研究
【摘要】本文对鱼雷形状的水下自主航行器的六自由度非线性动态模型的研制作了较为详细的介绍。
该动态模型充分考虑了各方面的因素,其中包括静水力学,超重,流体力学,操舵、推进力和力矩等。
此外模型还考虑了航行器动力学和环境的影响。
【关键词】水下自主航行器;建模;仿真研究
1.引言
水下自主航行体是一种重要的用于水下勘探的机器人,同时也是用于检测的精密仪器。
其应用领域涵盖:科学研究(海洋学、地理学、地球物理学等),环境保护(废弃垃圾处理监控,沼泽湿地监测等),商业(石油与天然气勘查,海底管道铺设,港口监控等)和军事(水雷战,战场情报收集,智能武器等)。
随着其水下应用的不断增多,AUV的开发需求越来越强烈。
但是水下航行体的动力学是一个高度非线性的且各自由度之间是相互耦合的。
本文介绍了水下自动航行体的动力学数学模型。
AUV的仿真和运动方程的解算是系统设计与控制的基础,因此首先需要分析航行体在水下航行时受到的所有外力和力矩。
其次要对各种力和力矩(惯性力,静水力,流体力,超重,推进力以及环境的影响等)的作用效果加以推导计算,最后求出各方程在特定条件下的数值解。
由于动态仿真能在不扩展现有模型的前提下对给定系统的性能离线做出较为准确的评估,因此动态仿真已经成为AUV开发的强大工具。
本软件用MATLAB SIMULINK和C++语言编写而成,并且利用三维图形界面显示实时数据。
2.AUV模型
水下航行体一般可认为是具有六自由度的刚体,其平动和转动方程可以依据牛顿定律建立。
其六种不同的运动形式分别定义为:前后,左右,上下,横滚,俯仰,偏航。
要对航行体的物理行为进行分析,首先必须建立合适的坐标系。
为此必须理解世界坐标系和艇体坐标系这两种坐标体系及相互转换关系。
文中的动力学运动方程均建立在艇体坐标系下,如图1所示。
3.AUV运动方程
描述AUV运动特征的方程]如下:
作用在水下航行体的所有外力和力矩主要划分为以下6类:(1)静水力和力矩;(2)超重惯性力和力矩;(3)流体动力和力矩;(4)操舵力和力矩;(5)推进力和力矩;(6)环境作用力。
静水力由重力和浮力构成,它们均是方位的函数且与航行体的运动状态无关。
粘滞力是关于运动速度的函数,而艇体的超重效果则主要与加速度有关。
流体力是作用于艇体压力中心的包含牵引力和拖曳力。
压力中心是攻角的函数,当攻角增大时压力中心的位置会偏移。
因此搞清楚压力中心的变化对航行体运动的影响就显得十分重要。
航行体的航行姿态由水平舵和垂直舵控制。
推进力提供动力Xprop和艇体坐标系下绕X轴的动力矩Kprop表示。
环境的影响主要考虑水下的涌流。
仿真的过程中,可以改变方程各参量的值,对航行体的运动可以实时监控。
4.仿真
仿真器由输入、计算和输出3部分构成。
在输入部分,用户可以设定航行体的各种参数,如航行体的几何形状尺寸、质量、流体力学参数等。
计算部分由AUV的六自由度动力学模型构成,模型仿真利用MATLAB SIMULINK编程实现。
工具包由以下五个子系统构成:(1)推进力和力矩计算子系统;(2)静水力和力矩计算子系统;(3)流体动力和力矩计算子系统;(4)操舵力和力矩计算子系统;(5)环境影响(水下涌流)子系统。
动力学子系统负责求解各运动方程,求解时考虑了作用于艇体的外力和力矩以及航行体的运动学。
通过求解得出航行体在艇体坐标系下的加速度、线速度和角速度。
航行体在惯性坐标系的位置则通过坐标转换子系统计算得出。
对动力学运动方程积分可以得出航行体下一时刻的速度值。
结合航行体在艇体坐标系下的最新速度与艇体移动的运动方程可以推导出其在世界坐标系下的速度。
对航行体在世界坐标系下的速度积分并考虑洋流的影响就可以获得航行体的位置。
输出部分主要实现数据的文件保存、二维或三维图形显示、以及航行体机动情况的三维视景显示,如图2所示。
将控制子系统内置于工具包中使我们能使用各种类型的控制器进行仿真模拟,如滑模型控制、模糊控制、自适应控制、QFT方法等。
5.实例
为了说明软件包的性能,我们选取一个名为REMUS的AUV作为实例进行仿真[7]。
将该AUV的已知参数输入,就可以对AUV的行为进行仿真,并将仿真结果与文献[7]中的实验结果进行对照比较。
在以下各图形中可以看到REMUS 的机动情况。
图3显示了航行体方向舵偏角渐变对其运动的影响,其中仿真开始的最初10s内水平舵设为零度,随后的25s内航行体方向舵转为正4度,再后30s 内方向舵转为负4度。
6.结论
利用本文讨论的航行体刚体动力学模型,通过改变航行体的方向舵,艉部水平舵和发动机功率等参数值可以产生航行体的开环行为结果。
所开发的软件不仅可用于系统结构和行为控制策略的最优设计,还可以作为已设计完成系统的试验台。
参考文献
[1]Fossen T.I,“Guidance and Control of Ocean Vehicles”,John Wiley & Sons,1994.
[2]Loueipour M,Narimani M,”Dynamic Modelingand simulation of Remotely Operated Vehicles”,UDT Conference,2006.
[3]Loeipour M.,“Dynamic of underwater vehicles”,sub sea R&D research centre,Isfahan University of Technology,Isfahan,Iran,2001.
[4]Loeipour M.,“Design of Control System for ROV based on QFT Method”,M.S Thesis,1997.
[5]Tabesh A,Narimani M“Design of control system for a ROV”,Sub sea R&D centre,Isfahan University of Technology,1999.
[6]Narimani M,Loeipour M,“Positioning Control of Remotely Operated Vehicle”,UDT Conference,2006.
[7]Prestero T,“Development of Six-DOF simulated model for the REMUS Autonomous Underwater Vehicle”,A dissertation at University of California.
胡玉梅(1967—),女,浙江金华人,毕业于哈尔滨工业大学机械制造系,现供职于中国船舶重工集团公司第710研究所,主要从事UUV研究工作。