浅谈动态交通分配的三种模型以及算法
3-2-交通分布预测

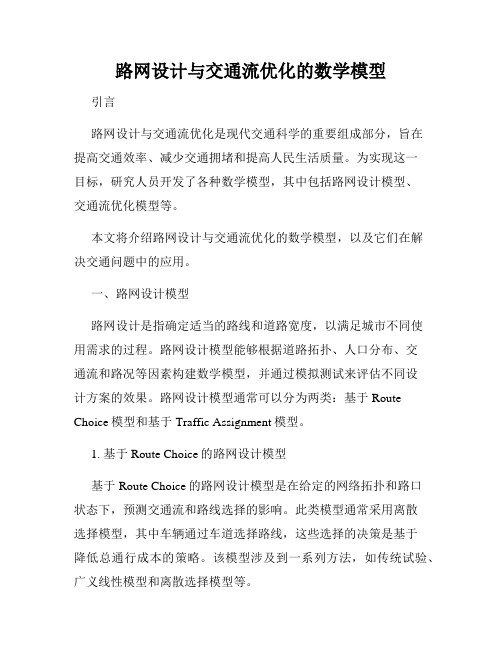
例3-7:利用基础年的OD矩阵和目标年发生交通 量的预测值求目标年OD矩阵
D O
1
2
3 合计 预测值
1
17.0 7.0
4.0 28.0 38.6
2
7.0 38.0 6.0 51.0 91.9
3
4.0 5.0 17.0 26.0 36.0
合计 28.0 50.0 27.0 105.0 166.5
现状的O-D分布 增长系数法预测 重力模型法预测
•即使没有完整的现状OD表也能进行预测。
(其基本假设为交通区 i 到交通区 j的出行分布量与i区 的出行发生量O(i)、j区的出行吸引量D(j)成正比, 与 i区和 j区之间的出行阻抗成反比。)
•重力模型法是交通规划中使用最广泛的 交通分布预测模型。
比较各种增长率模型的基本假设、计算方法和应用 条件。
➢ 常增长率模型? ➢ 平均增长率模型? ➢ Detroit模型(底特律法)? ➢ Fratar模型(福莱特法)? ➢ Furness模型(佛尼斯法)?
增长系数法的特点:
•当土地利用、交通源布局等有较大变化、
预测区域交通设施状况有较大变化时,误 差较大。
不收敛转步骤二,循环进行
4、Fratar模型福莱特法
福莱特法假设i,j小区间分布交通量qij的增长系数 不仅与i小区的发生增长系数和j小区的吸引增长系 数有关,还与整个规划区域的其他交通小区的增长 系数有关。
fF
(FOmi ,
FDmj )
FOmi
FDmj
( Li Lj 2
)
Li
Oim qimj FDmj
D O
1
2
3 合计
路网设计与交通流优化的数学模型
路网设计与交通流优化的数学模型引言路网设计与交通流优化是现代交通科学的重要组成部分,旨在提高交通效率、减少交通拥堵和提高人民生活质量。
为实现这一目标,研究人员开发了各种数学模型,其中包括路网设计模型、交通流优化模型等。
本文将介绍路网设计与交通流优化的数学模型,以及它们在解决交通问题中的应用。
一、路网设计模型路网设计是指确定适当的路线和道路宽度,以满足城市不同使用需求的过程。
路网设计模型能够根据道路拓扑、人口分布、交通流和路况等因素构建数学模型,并通过模拟测试来评估不同设计方案的效果。
路网设计模型通常可以分为两类:基于Route Choice模型和基于Traffic Assignment模型。
1. 基于Route Choice的路网设计模型基于Route Choice的路网设计模型是在给定的网络拓扑和路口状态下,预测交通流和路线选择的影响。
此类模型通常采用离散选择模型,其中车辆通过车道选择路线,这些选择的决策是基于降低总通行成本的策略。
该模型涉及到一系列方法,如传统试验、广义线性模型和离散选择模型等。
2. 基于Traffic Assignment的路网设计模型基于Traffic Assignment的路网设计模型将交通流视为网络流,将道路分配为不同的流量,以便实现网络通量的最小化。
这些模型通常将交通流表示为基于重力模型的概率流模式,并将分派和选路视为应对时空响应的交互性问题。
该模型可以用于构建交通流分配表格和地理信息系统分析。
二、交通流优化模型交通流优化是指通过改善道路系统、车辆和交通管理等措施来提高交通效率和减少拥堵的方法。
交通流优化模型可以根据交通流量、交通流性质、交通管理等因素来构建数学模型,并提出相应的优化方案以实现交通流的最佳分配。
交通流优化模型通常包括以下几个方面:1. 基于最小路径算法的交通流优化模型基于最小路径算法的交通流优化模型主要是通过路径选择算法找到最佳的路径,以最大程度地减小交通阻碍和拥堵问题。
交通流分配

源于资源分配的研究
• 在1940年到1954年期间, Cowles Commission 是当时在数 理经济学以及运用数学规划来分析经济问题等方面最领先 的学术研究中心。Cowles的经济学家在经济科学方面共有 12名Nobel获得者,其中8位在1940~1954期间从事研究。
• “资源分配理论(Theory of Resources Allocation)‖研究开 始于1951年,由兰德公司(Rand Corporation )提供支持. • 研究小组在进行道路网络的有效性研究时,提出了“网络 均衡”。
• Duffin (1947) 表明一个半线性传导体的电 路网络有稳定的电流状态的关键在于定义 在每条导线上“传导体函数”的积分。 • Nash (1951) 提出了非合作关系下的博弈 论,UE可看作是它的一个特例。 • Wardrop (1952) 提出了两条准则,但没 有给出数学描述。
其它有关网络均衡研究 (Studies出版之后)
交通运输规划与设计
刘杨 liuyangits@
交通流分配
• 将预测获得机动车OD交通量,根据 已知的道路网描述,按照一定的规则, 符合实际地分配到,并据此对城市交通网 络的使用状况做出分析和评价。
第八章 交通流分配 (Traffic Assignment)
• 1955年12月27日,McGuire和Beckmann收到来信,信 上建议Studies将付印, 售价4美元。该书同时也被 Oxford大学出版社出版,售价32先令。到1959为止,该 书已被3次印刷。1959年,该书的西班牙版问世。
• 2005年9月, WorldCat List of Records 的研究表明,全 世界373个图书馆收藏了Studies ,13个图书馆拥有该书 的兰德版本。7个图书馆拥有该书的西班牙版本。 • 2005年10月通过Web of Science 搜索发现,321篇文章引 用了Studies
交通规划中的交通拥堵模型
交通规划中的交通拥堵模型交通拥堵是当今社会中一个普遍存在的问题。
为了有效解决交通拥堵问题,交通规划师常常使用各种模型来预测和管理交通拥堵。
本文将探讨交通规划中的交通拥堵模型,并介绍其中的一些常见方法。
交通拥堵模型是一种用于描述交通流量和交通拥堵程度之间关系的数学模型。
这些模型基于交通流量理论和交通工程原则,通过分析道路网络结构、车辆流动规律和交通需求来预测拥堵情况。
下面将介绍几种常见的交通拥堵模型。
一、流量密度模型流量密度模型是交通规划中最常用的一种模型。
该模型基于交通流量和道路面积之间的关系,通过测量车辆通过道路上的单位面积的数量,来评估交通拥堵的程度。
流量密度模型常用的评价指标有交通流量、通行速度和通行能力等。
交通规划师可以根据该模型的结果,制定相应措施来缓解交通拥堵。
二、交通模拟模型交通模拟模型是一种通过计算机模拟交通流动过程的方法。
该模型基于交通流理论和运动学原理,通过模拟车辆在道路上的运动轨迹,来预测交通拥堵的情况。
交通模拟模型可以考虑诸如交通信号灯、车辆行为和道路结构等因素,能够更加准确地模拟真实交通情况,提供更为精确的拥堵预测。
三、多目标优化模型多目标优化模型是一种通过优化算法解决交通拥堵问题的方法。
该模型通过设定目标函数和约束条件,将交通拥堵的影响因素进行量化,并根据优化算法的结果,找到最优的交通规划方案。
多目标优化模型通常考虑交通流量、通行时间、交通安全等多个指标,能够综合考虑各种因素,为交通规划提供全面的参考。
除了以上几种常见的交通拥堵模型,还有一些其他模型也在交通规划中得到应用,如网络模型、统计模型和人工神经网络模型等。
这些模型各有特点,可根据实际情况选择适合的模型进行应用。
然而,虽然交通拥堵模型能够为交通规划提供一定的指导,但是仍存在一些局限性。
首先,模型的精确性受限于输入数据的准确性和实际情况的变动性。
其次,模型无法完全考虑人们的行为心理因素和突发事件对交通拥堵的影响。
第九章-基本交通分配模型1

Step 3 用加权平均法计算各路段当前交通量
(8-1)
Step 4 如果
相差不大,则停止计算。即
为最终分配结果。否则返回 Step1 。
实践中 Step 4停止计算的判断即可用误差大小,也可以用循环次数的多少来进 行运算的控制 ;用的比较多的是循环次数。在 Step 3中权重系数 a由计算者给 定。a即可定为常数,也可定为变数。通常定为常数时a=0.5;定为变数时a=1/n, n是循环次数。
◦ 原理理论上合理,实际求解非常困难。
◦ Beckmann(1956)等价数理最优化模型(有约束非线性最优 化问题)
◦ 其中:
,表示路段a上的交通流量;
◦ :路段 - 径路相关变量,即 0-1 变量。如果路段a属于从
出发地为r目的地为s的OD间的第k 径路 ,则其值为1 ,否则 为0 ;
◦ f;krs :出发地为r ,目的地为s的 OD 间的第k条径路上的流量
一、用户平衡分配模型及其求解算法
◦ (1) 模型化
◦ 其中,hkrs:OD对rs间第k条径路的交通量。 tkrs :OD对rs间第k条径路的行驶时间。 trs:OD对rs间最短径路的行驶时间。 qrs :OD对rs的分布交通量。
【例9-3】 如图表示了一对由两条可选路径连接的起终点, t1,t2分别表示路段1,2上的交通时间,用x1, x2表示相应的交通流 量,q表示总的OD流量,则q=x1+x2。
◦ 对于完全满足Wardrop原理定义的平衡状态,则称为平衡 分配方法;对于采用启发式方法或其他近似方法的分配模 型,则称为非平衡分配方法。
交通分配模型
均衡模型 非均衡模型
用户均衡模型扩展 标准用户均衡模型 系统优化均衡模型
交通规划07-2分配

步3:向前计算路段流量 从r点开始,按s(i)的下降顺序依次考虑每个节点i,计算 进入它的所有路段流量,对路段(i,j),进入它的流量为:
第四节
非均衡分配方法
若i r
w(i, j ) q rs w(i, m) m O j x(i, j ) x(l , i ) w(i, j ) l w(i, m) I j mO j
a
第四节
其他分配方法
r, s
平衡分配过程中应该满足交通流守恒的条件,用公式 可以表示为:
kWrs rs f k qrs
径路交通量和路段交通量之间应该满足如下的条件:
xa f krs ars ,k
r s k rs ck ta xa ars ,k a
a L
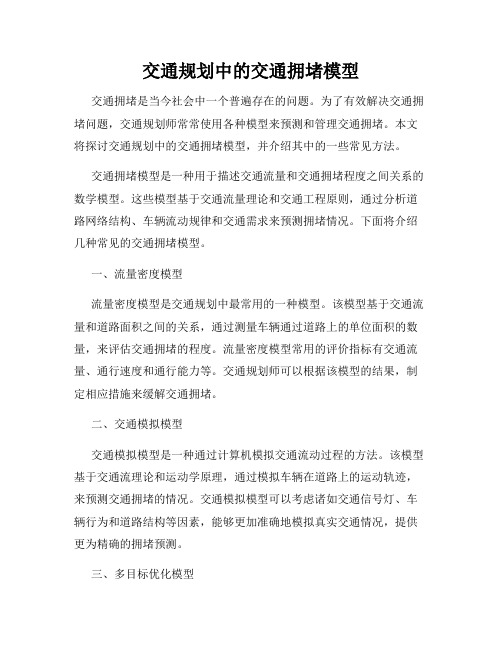
1-d
1
1-d
1
图a、b,三条路径的阻抗都是1,由Logit模型,这三条路径 被选中的概率均为1/3,它们分配的流量也相同。 但图b,当d很大,接近1时,1、2路径重叠路段很长,极限 情况下,认为合成一条路径。则它与路径3的选择概率各为1/2, 上面两条路径各为1/4。 模型反映不出图b的情况:1、2路径的相关性(重合路径)。
⑨
8
9
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
0
∞
2
0
运用矩阵迭代法求最小阻抗
设Oi为离开节点i的路段另一端点的集合 设Ii为进入点i的路段的另一个端点的集合
1 , j) 1 w(i② ③ 若L(i,j) q js rs w ( m , j ) m I j r=3,s=3 r=2,s=4 r=4,s=2 0.368 1 0 x(i, j ) 1 ⑤ w(i1 , j) ⑥ 若i r L(i, j ) ④ x ( j , m ) 其它情况 i I m w(i, j ) L(i, j ) w(m,ji) w ( m , j ) 其它情况 o W(i,j) j r=5,s=2 r=6,s=0 mI r=4,s=4 0 1 mI j 1 0.368 0.368 1 1 ⑦ ⑧ ⑨
交通路网优化中的路径规划算法综述

交通路网优化中的路径规划算法综述交通拥堵是大城市面临的一个重要挑战。
为了缓解交通拥堵问题,提高交通效率,路径规划算法在交通路网优化中起着重要的作用。
本文将综述目前常用的路径规划算法,包括Dijkstra算法、A*算法、Bellman-Ford算法和Floyd-Warshall算法,并分析其优缺点及应用场景。
1. Dijkstra算法Dijkstra算法是一种求解单源最短路径的经典算法。
它的基本思想是从起点开始,逐步扩展搜索范围,直到找到最短路径。
Dijkstra算法通过维护一个优先队列来选择当前距离起点最近的节点进行扩展,直到找到目标节点或搜索完所有节点。
该算法适用于无向图或有向图中有正权边的情况。
Dijkstra算法的时间复杂度为O((V + E) log V),其中V是节点数,E是边数。
2. A*算法A*算法是一种启发式搜索算法,结合了Dijkstra算法和贪心算法的思想。
它引入了启发函数来指导搜索方向,以减少搜索空间。
在A*算法中,每个节点都有一个估计值,表示该节点到目标节点的预计代价。
算法通过维护一个优先队列来选择当前估计代价最小的节点进行扩展,直到找到目标节点。
A*算法的时间复杂度与Dijkstra算法相同,但在实际应用中通常具有更好的性能。
3. Bellman-Ford算法Bellman-Ford算法是一种求解单源最短路径的动态规划算法。
它通过使用松弛操作来逐步更新节点的最短路径估计值,直到收敛为止。
Bellman-Ford算法适用于解决带有负权边的图中的单源最短路径问题,但要求没有负环路。
该算法的时间复杂度为O(VE),其中V是节点数,E是边数。
4. Floyd-Warshall算法Floyd-Warshall算法是一种求解全源最短路径的动态规划算法。
它通过使用中间节点来逐步更新节点间的最短路径估计值,直到得到全局最短路径。
Floyd-Warshall算法适用于解决带有负权边的图中的全源最短路径问题,但要求没有负环路。
5 四步骤交通需求预测模型(4.1)交通分配

交通规划理论与方法(4)——
“四步骤”交通需求预测模型
西南交通大学交通运输学院
杨 飞 (博士、讲师)
交通运输学院
主要内容
交通分配的基本问题描述
交通分配作用 基本概念: 路径与最短路径、交通阻抗、交通均衡问题、非均衡 问题、交通网络的数学化表示
非均衡分配方法
如全有全无分配法、单路径分配法等 B-L均衡分配法(重点)
4.3 基本概念
(4)交通阻抗 A.路段阻抗的函数关系确定 通过实测数据进行回归分析或者理论研究两种方 式对于公路走行时间函数研究
其中被广泛应用的是由美国道路局(BPR –Bureau of Public Road)开发的函数,被称为BPR函数
4 交通分配
4.3 基本概念 (4)交通阻抗 A.路段阻抗的函数关系确定 时间-流量函数曲线变化特征猜想
如果两点之间有很多条路线可供出行者选择那每个出行者自然都选择最短路径随着这两点之间交通量的增大其最短路径上的交通流量也会随之增加增加至一定程度之后这条最短路径的走行时间就会因为拥挤或堵塞而变长以至长过次短路径的走行时间于是就有一部分道路利用者会选择次短的道路随着两点之间的交通量继续增加两点之间的所有道路都有可能被利用特大城市支路的利用4交通分配45交通均衡基础问题道路网均衡状态特征如果所有的道路利用者都准确知道各条道路所需的行走时间并选择走行时间最短的道路最终两点之间被利用的各条道路的走行时间会相等没有被选择的道路的走行时间会更长两点之间被利用的各条道路的走行时间会相等没有被选择的道路的走行时间会更长这种状态被称之为道路网的均衡状态1952年wardrop给这种均衡状态下了准确定义4交通分配45交通均衡基础问题wardrop第一原理在道路网利用者都知道网络的状态并试图选择最短路径时网络会达到这样一种均衡状态
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浅析多时段动态交通分配模型以及动态交通分配的算法 班级:运输(城市轨道交通)1203班 学号:******** 姓名:*** 指导老师:陈旭梅 王颖 浅析多时段动态交通分配模型以及动态交通分配的算法 12251104 刘君君 城轨1203班
【摘要】 动态交通分配问题是在已知城市交通网络拓扑结构和网络中时变的交通需求的前提下,寻求交通网络上各有向路段上时变的交通量的问题。自该问题提出以来.研究者们给出了各种分配模型来描述它。这些模型大致可分为四类:一、仿真模型;二、数学规划模型;三、最优控制模型;四、变分不等式模型。与以上四种模型相比,从不同的角度来看,还可以分为其他模型,如基于多时段动态交通分配模型、多用户动态交通分配模型、基于模糊旅行时间的动态交通分配模型等。本文讨论的就是基于多时段动态交通分配模型以及动态交通分配的算法。
【关键词】 基于多时段动态交通分配模型;混沌蚁群算法;
Analysis of multi-period dynamic traffic assignment model and algorithm of dynamic traffic assignment 122251104 Liu Jun jun The class1203
Abstract: Dynamic traffic assignment problem is known in urban traffic network topology and network traffic in the time-varying demand under the premise of seeking transport networks to time-varying traffic problems on the road. Since the issue. Researchers presented various distribution models to describe it. These models can be roughly divided into four categories: first, the simulation model, second, the mathematical programming model; third, the optimal control model of four, and variation inequality model. Compared with the above four models, from a different perspective, can also be divided into other models, such as those based on multi-period dynamic traffic assignment model and multi-user dynamic traffic assignment models, dynamic traffic assignment model based on fuzzy travel time. Article these unconventional perspectives of dynamic traffic assignment model and algorithm of dynamic traffic assignment.
Key words: dynamic traffic assignment model based on multi-period, chaos Ant Colony optimization algorithm 1 引言 城市化水平的高低是反映人类生活水平高低的一个重要指标,当前城市化水平不断提高随之产生的交通拥挤与堵塞问题也变得越来越严重,解决交通拥挤的直接办法是提高路网的通行能力, 但无论哪个城市都存在可供修建道路的空间有限, 建设资金筹措困难等问题。 因此要比较有效的解决城市交通拥挤问题不能单纯的依靠增加道路面积和长度,而要不断完善路网结构和加强交通现代化。因此如何高效合理地利用现有路网设施资源提高交通路网运营水平及其安全性使运输系统为经济发展提供更为有利的支持已成为目前政府急待解决的问题。信息作用下的动态交通配流问题是智能交通系统的核心理论内容和关键技术。本文介绍了三种动态交通分配模型。第一种是多用户动态交通分配算法,它可以用来解决城市交通拥挤及阻塞问题为出行者提供尽可能多的交通信息;第二种是基于多时段动态交通分配方法是基于时段划分的,它不仅反映不同时段交通量的变化规律,而且在分配过程中考虑路网中的交通阻抗,充分反映已有交通量对交通分配的影响。该模型能够反映交通网络的动态属性,从而为交通诱导提供必要的可用信息;第三种是一种新的模糊动态交通分配模型,采用模糊集合理论描述动态路段旅行时间和路径旅行时间,然后应用可变模糊截集的模糊图方法找出模糊最短路径集合,并计算出各条路径的隶属函数,最后采用C-LOGIT模型实现网络加载。
2 基于多时段动态交通分配模型 2.1 模型描述 多时段动态用户配流模型,将所考虑的时段分为若干个时段,每个时段的交通流受前面时段的影响,并利用经典的Beckmann解决UE模型的方法,得出类似于UE均衡条件。为了与静态UE模型区别,本文模型称为动态UE模型,该模型假设:①每个时段交通出行量已知;②每个路段上的路阻函数ta(x)已知(即路段运行时间与路段交通量z有关)。
本文所建立的是动态多时段UE配流模型,将所考虑的大时段[o,T]分为m个小时段𝒕𝟏;𝒕𝟐…,𝒕𝒎,即 ∑timt=i=T,𝒕𝒊 即为第i个时段,每个时段可相等,也可以不相等。本文所用的符号含义如下:
𝑨(𝒌)为以节点k为起点的所有路段集合;
𝑩(𝒌)为以节点k为终点的所有路段集合;
𝒒𝒓𝒔(𝒕𝒊)为在𝒕𝒊时段,节点r产生的流向s 的流量,𝒒𝒓𝒔(𝒕𝒊)已知;
𝒕𝒂(q)为路段a流量为q的广义行驶时间(即路阻函数),这种函数关系已知;
𝑶𝒂𝒔(𝒕𝒊)为𝒕𝒊时刻路段a上流向终点s的流出量;
𝒙𝒂(𝒕𝒊)为𝒕𝒊时刻路段a上的流量(交通分配量);
𝑶𝒂(𝒕𝒊)为𝒕𝒊时刻路段a上的流出量;
𝑶𝒂(𝒕𝒊)=∑𝑶𝒂𝒔(𝒕𝒊)𝐬;
𝒆𝒂(𝒕𝒊)为𝒕𝒊时段末路段a上的流量;
𝒇𝒌
𝒓𝒔
(𝒕𝒊)为𝒕𝒊时段,分配在起点r终点s的第k条路径上的流量;
δa,k
rs
={
1 a∈k
0 a∈k 𝑪𝒌
𝒓𝒔
(𝒕𝒊)为𝒕𝒊时段,由r到s,第k路线上的运行时间。
2.2 动态交通分配模型的约束条件 本模型服从FIFO规则,即先进先出规则。设一车辆在𝒕𝒊时段进入路段a。路段a上的行驶时间近似认为𝒕𝒂(𝒆𝒂(𝒕𝒊))(因为行驶时间𝒕𝒂(q)是随q的变化而变化,若𝒕𝒊时段很小,则可以认为a上的交通量𝒆𝒂(𝒕𝒊)为不变的),则在𝒕𝐢𝐚(𝒆𝒂(𝒕𝒊))时刻离开a路段。为简便起见,若取每个小时段为单位时间(或相等时间),则有
这里假设第𝒕𝒊时段的交通流量a在本时段内不流出,即t<𝒕𝒊;说明𝒕𝒊时段a路段上的流出量必为前面某时段𝒕𝒊的流人量。在𝒕𝒊时段末,路段a上的交通流量,不仅与前一时段的交通量有关,还与本时段的流出量有关,应为
即𝒕𝒊时段a路段上现有交通量等于前一段交通量加上该时段交通分配量减去该时段交通流出量,设 𝒆𝒂(0)=0, 考虑任一OD对r~d,在点r,ti时段的交通分配量,应该为该节点的生成量与其它节点经
过该节点流向s的交通量之和,即
有以下约束:
2.3 动态分配模型的目标函数 为简便起见,将所考虑的时段[0,T]分为m个相等的时期,𝒕𝟏, 𝒕𝟐……tm,因为每个时段相等,
可将小时段简记为1,2,……m,则第i个时段的均衡模型为: 同时还满足: 在本模型中,若只考虑一个时段,(pi)就是UE模型,若考虑多时段,(pi)与UE就有很大区别:①目标函数不仅与本时段交通量有关,而且与前时段的交通量有关;②在任一起点r的交通分配量不仅与该点的发生量有关,还与流经该点的交通量有关。因此,(pi)反映了交通网络的动态变化规律。
2.4 该模型的求解 Frank—Wolfe算法是用线性规划逐步逼近非线性规划的方法来求解UE模型的。该方法是一种迭代算法。其思路为:从某一初始点出发,进行迭代,每步迭代中,先找到一个最速下降的方向,然后再找到一个最优步长,在最速下降方向上截取最优步长得到下一步迭代的起点。重复此过程,直到找到最优解。此方法的前提条件是模型的约束条件必须都是线性的。这种方法在教材中有比较详细的解说以及分析,在本文就不赘述了。
3 混沌蚁群算法 3.1 混沌蚁群算法基本原理 蚁群算法(Ant Colony Algorithm,简称ACA)是意大利学者M.Dorigo等在20世纪90年代初提出的一种新型的模拟进化算法,用蚁群在搜索食物源的过程中所体现出来的寻优能力来解决一些组合优化问题。专家证明,当大量蚂蚁觅食时就会表现出一种信息的正反馈现象,指导蚂蚁最终找到一条从蚁穴到食物源的最短路径。10多年的研究结果已经表明:蚁群算法对于组合优化问题具有很强的发现较好解的能力,在动态环境下也表现出高度的灵活性、健壮性和适应性。
3.2 用混沌蚁群算法求解离散型动态用户最优配流问题具体步骤 用混沌蚁群算法求解离散型动态用户最优配流问题具体步骤如下: 步骤1:初始化。.确定离散时间段的数目T、各离散时间段的OD交通量qrs(t)、各路段初始流量qij(0)、各路段初始路阻函数值tij(qij(0)),以及迭代步数N,根据交通量确定人工蚂蚁个数,对所有r,s,i,j成立, 以及迭代步数N,根据交通量确定人工蚂蚁个数m=1,t=1。
步骤2:令迭代步数以=0,混沌初始化,设置各路径上的信息素量,将m只蚂蚁(每只蚂蚁代表一定的交通量)分批置于每个出行起点上。
步骤3:将各蚂蚁的初始点i置于当前解集tab𝒖𝒌(s)中,对每个蚂蚁k(k=1,2,…,m),按蚂蚁k由节点i转移到节点j的规则式的转移规则转移至下一节点j,再将j置于当前解集tab𝒖𝒌(s)中;当考虑路段的容量限制𝒒𝒊𝒋(t)≤qij时,超过容量限制的蚂蚁转移至其他有效路径上,再次进行分配。