有限元网格划分的基本原则
弹性力学有限元法.ppt

2021/3/11
13
在离散体中任取一个单元,三个节点按逆时针方向顺序编
号为i,j,m。节点坐标分别表示为(xi,yi),(xj,yj), (xm,ym)。
2021/3/11
14
对于弹性力学平面问题,一个三角形单元上的每 个节点应有2个位移分量,则三角形单元共有6个自 由度: ui , vi ,u j , v j ,um , vm 。
u x
K
矩形单元:采用双线性位移模式,单元内的应力是线性
变化的。
u kx2 mx
(kx2 mx) x
3. 薄板弯曲单元和薄板单元
2021/3/11
7
4. 多面体单元
2021/3/11
8
5. 等参数单元:单元内任一点的位移与节点位移之间的关系 恰好和该点的坐标与节点坐标之间的关系相同。
任意四边形的边一般不平行于坐标轴,沿单元边的位 移将按抛物线变化,而不是线性变化。
2021/3/11
2
(2)分析单元的力学性质 列出单元节点和节点位移之间的关系式。应用几何方程和
物理方程来建立力和位移的方程式,导出单元刚度矩阵。
节点载荷和节点位移之间的关系式为:
Fe Kee
K e 为单元刚度矩阵。
(3)计算等效节点力:用等效的节点力来代替所有在单元 上的力。
2021/3/11
元位移模式。
u(x, v(x,
y) y)
Ni
(x, 0
y)
0 N j (x, y) Ni (x, y) 0
0 Nm (x, y) N j (x, y) 0
0
Nm
(
x,
y)
u Ne
2021/3/11
18
ansys实验强度分析报告
ansys有限元强度分析一、实验目的1 熟悉有限元分析的基本原理和基本方法;2 掌握有限元软件ANSYS的基本操作;3 对有限元分析结果进行正确评价。
二、实验原理利用ANSYS进行有限元静力学分析三、实验仪器设备1 安装windows XP的微机;2 ANSYS11.0软件。
四、实验内容与步骤1 熟悉ANSYS的界面和分析步骤;2 掌握ANSYS前处理方法,包括三维建模、单元设置、网格划分和约束设置;3掌握ANSYS求解和后处理的一般方法;4 实际应用ANSYS软件对六方孔螺钉头用扳手进行有限元分析。
五、实验报告1)以扳手零件为例,叙述有限元的分析步骤;答:(1)选取单元类型为92号;(2)定义材料属性,弹性模量和泊松比;建立模型。
先生成一个边长为0.0058的六边形平面,再创建三条线,其中z向长度为0.19,x向长度0.075,中间一段0.01的圆弧,然后把面沿着三条线方向拉伸,生成三维实体1如题中所给形状,只是手柄短了0.01;把坐标系沿z轴方向平移0.01,再重复作六边形面,拉伸成沿z轴相反方向的长为0.01的实体2;利用布尔运算处理把实体1和2粘接成整体。
(4)划分网格。
利用智能网格划分工具划分网格,网格等级为4级。
(5)施加约束。
在扳手底部面上施加完全约束;(6)施加作用力。
在实体2的上部面上施加344828pa(20/(0.01*0.0058))的压强,在实体2的下部面的临面上施加1724138pa(100/0.01/0.0058)的压强;(7)求解,进入后处理器查看求解结果,显示应力图。
2)对扳手零件有限元分析结果进行评价;答:结果如图所示:正确的显示出了受力的最大位置及变形量,同时给出了各处受力的值,分析结果基本正确,具有一定的参考意义。
六、回答下列思考题1.什么是CAE技术?答:CAE是包括产品设计、工程分析、数据管理、试验、仿真和制造的一个综合过程,关键是在三维实体建模的基础上,从产品的设计阶段开始,按实际条件进行仿真和结构分析,按性能要求进行设计和综合评价,以便从多个方案中选择最佳方案,或者直接进行设计优化。
有限元分析网格划分的关键技巧

网格规模和分辨率的选择是有限元分析网格划分中的重要环节。以下是选择 合理的网格规模和分辨率时需要考虑的几个因素:
1、分析精度:网格规模和分辨率越大,分析精度越高,但同时也会增加计 算成本。因此,需要在精度和成本之间找到平衡点。
2、计算资源:网格规模和分辨率越大,需要的计算资源越多,需要考虑计 算机硬件的性能和应用场景的需求。
4、三角形单元:适用于不规则区域和复杂结构的模拟,如表面模型等。
5、四边形单元:适用于规则区域和简单结构的模拟,如立方体、圆柱等。
6、高阶单元:高阶单元具有更高的计算精度,但同时也需要更多的计算资 源。
在选择合适的单元类型和阶次时,需要考虑以下因素:
1、分析精度:根据分析目标和实际需求,选择能够满足精度要求的单元类 型和阶次。
4、施加边界条件和载荷:对计算域的边界和加载条件进行定义,以模拟实 际工况。
5、进行有限元分析和求解:利用有限元分析软件进行计算,得到各节点处 的响应和位移等结果。
6、结果后处理:对分析结果进行可视化处理,如云图、动画等,以便更好 地理解和评估仿真结果。
技巧2:如何选择合适的单元类 型和阶次
5、经验准则:根据类似问题的经验和网格划分准则,可以指导网格规模和 分辨率的选择。例如,对于结构分析,通常建议最大单元尺寸不大于最小特征尺 寸的1/10。
技巧4:如何使用有限元分析软件自动划分网格
随着有限元分析软件的发展,越来越多的软件提供了自动划分网格的功能。 使用这些功能可以大大简化网格划分的过程,提高分析效率。下面介绍两种常见 的自动划分网格方法:
2、计算效率:在保证精度的前提下,尽量选择计算效率较高的单元类型和 阶次。
3、单元特性:了解各种单元类型的适用范围和局限性,以便在分析过程中 更好地满足实际需求。
电磁场计算中的有限元方法教程

电磁场计算中的有限元方法教程引言电磁场计算是电磁学领域中重要的研究内容之一,广泛应用于电气工程、通信工程、电子技术等领域。
而有限元方法(Finite Element Method,简称FEM)是一种常用的数值计算技术,可以解决电磁场计算中的复杂问题。
本文将介绍有限元方法在电磁场计算中的基本原理、步骤和应用。
一、有限元方法简介有限元方法是一种通过将待求解区域划分成有限数量的小单元,利用单元上的近似函数构造整个区域上的解的数值计算方法。
有限元方法的基本思想是在每个小单元内近似解以建立一个代数方程组,通过将这些方程组联立得到整个区域上的解。
有限元方法具有处理复杂几何形状、边界条件变化和非线性问题的优势,因此被广泛应用于工程和科学计算中。
二、电磁场方程建立在电磁场计算中,关键是建立合适的电磁场方程。
常见的电磁场方程包括静电场方程、恒定磁场方程、麦克斯韦方程等。
根据具体情况选择适用的方程,并根据材料的性质和边界条件确定相应的方程形式。
三、有限元网格划分有限元方法需要将计算区域划分为有限数量的小单元。
在电磁场计算中,通常采用三角形或四边形单元来进行划分,这取决于计算区域的几何形状和分辨率要求。
划分过程需要考虑电场变化的特点和计算精度的需求,合理划分网格对精确计算电磁场起着重要的作用。
四、有限元方程的建立有限元网格划分完成后,需要建立相应的有限元方程组。
以求解静电场问题为例,我们可以利用能量最小原理、偏微分方程等方法建立有限元方程组。
有限元方程组的建立需要考虑电场的连续性、边界条件和材料特性等。
五、有限元方程求解有限元方程组的求解是求解电磁场分布的核心任务。
根据具体的方程形式和计算区域的几何形状,可以采用直接法、迭代法、近似法等方法来求解方程。
在电磁场计算中,常用的求解算法包括高斯消元法、迭代法、有限元法和有限差分法等。
六、计算结果的后处理在得到有限元方法计算的电磁场分布结果后,需要进行相应的后处理,进行数据分析和可视化。
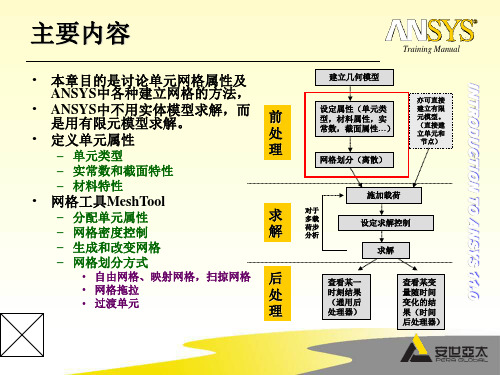
Ansys基础培训-网格划分-MeshTool
Training Manual
INTRODUCTION TO ANSYS 11.0
建立有限元模型 — 生成网格和改变网格
•
Training Manual
演示:
– – – – 恢复 ribgeom.db。 用 SMRT,6划分网格 (并非很好的网格)。 用 SMRT,3 重新划分网格(好的网格)。 将 ESIZE 设为 0.2 后重新划分网格,由于智能网格划分考虑了ESIZE,即使 SMRT 设为 3,网格也变得很粗糙,届时,注意单元尺寸并不相同 (因为 SMRT为打开状态)。 – 关闭 SMRT 重新划分网格。单元尺寸现在完全相同。
Training Manual
INTRODUCTION TO ANSYS 11.0
不同的面可以有不同的 AESIZE。 • 边界线仅在未指定 LESIZE 或 KESIZE时, 采用指定尺寸。 • 智能网格划分打开时,为适应线的曲率或几 何近似,指定的尺寸可能无效。
建立有限元模型 —网格密度控制
• 网格工具MeshTool
0trainingmanual建立有限元模型网格密度控制125台湾地区的认证要求?台湾标准检验局bsmi为了岛内电子电机产品的电磁辐射干扰于1995年5月公布商品电磁兼容性管理办法?并于1996年7月正式公告自1997年1月1日起管制复印机等产品的电磁兼容性能?之后陆续管制信息周边产品家电与广播音响产品
• 可以指定边长比例 — 最后一个分割和 第一个分割的比率,使网格数偏向中间 或一边。
建立有限元模型 —网格密度控制
面尺寸 • 在面的内部控制单元尺寸:
– Main Menu > Preprocessor > Meshing > MeshTool; then select ―Size Controls‖, ―Areas‖, and [Set] – 或使用 AESIZE 命令 – 或 Main Menu > Preprocessor > Meshing > Size Cntrls > ManualSize > Areas
2.5D有限元建模关键问题
2.5D有限元建模关键问题作者:王瑞胡志平任翔李芳涛温馨来源:《振动工程学报》2021年第01期摘要:为了提高2.5D有限元数值计算的求解精度及建模效率,分析了移动荷载作用下地基系统的动力响应特点,确定了计算域选取及网格划分的基本规则,评价了地基分层对波场的影响及边界的波动吸收效果,提出了可以规避边界影响的建模思路。
分析结果表明:当计算域尺寸满足低频振动要求(約60 m)时,反射波对计算结果的影响可以忽略;建模时可以采用辐射状网格划分,最小网格尺寸需满足高频振动要求(约0.5⁃1.0 m)。
荷载运行速度小于地基瑞利波速时没有波动传播现象,建议直接采用固定边界;荷载运行速度大于地基瑞利波速时可以通过切取局部计算域的方式规避反射波的影响,此时计算域半宽和纵向空间范围的选取需要遵循与马赫锥锥角和列车全长相关的几何关系。
荷载影响深度内的地基分层会扰乱地基波场,当地基上覆软弱土层或软弱夹层时,波动会在软土层聚集并在加载点后形成多个马赫锥。
关键词:分层地基; 建模; 2.5D有限元; 网格划分; 吸收边界中图分类号: TU472; TU311.3 文献标志码: A 文章编号: 1004-4523(2021)01-0080-09DOI:10.16385/ki.issn.1004-4523.2021.01.009引言随着铁路交通运量及速度的不断提高,列车运行引发的环境振动问题逐步凸显。
针对列车荷载作用下路基内部动应力的分布规律对路基长期沉降及稳定性影响规律的研究也日益增多。
现有研究方法主要有现场实测、室内模型试验及数值模拟三种,其中数值模拟方法被广泛采用,计算结果的精度及可靠性也在逐步提高[1⁃7]。
为了兼顾计算效率,以往常采用二维平面问题研究列车荷载作用下地基系统的动力响应规律[8]。
在地震工程领域,研究P波和SV波入射引发的场地动力响应规律时可以基于场地特点将三维问题简化为平面应变问题[9]。
研究列车荷载引发的地基动力响应时,虽然地基断面大多沿荷载移动方向保持不变,但在移动荷载作用下地基系统的响应特点并不符合二维平面问题的相关假定。
有限元

1、概念表达:网格数量的多少将影响计算结果的精度和计算规模的大小。
一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。
网格较少时,增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。
当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。
在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。
如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。
①ANSYS常用的坐标系总体坐标系、局部坐标系、工作平面、显示坐标系、节点坐标系、单元坐标系和结果坐标系。
②局部坐标系的类型分为直角坐标系坐标系、球坐标系和环坐标系。
③选择菜单路径Utility Menu→WorkPlane→Display Workig Plane将在图形窗口显示工作平面。
增加网格数量和单元阶次都可以提高计算精度。
因此在精度一定的情况下,用高阶单元离散结构时应选择适当的网格数量,太多的网格并不能明显提高计算精度,反而会使计算时间大大增加。
为了兼顾计算精度和计算量,同一结构可以采用不同阶次的单元,即精度要求高的重要部位用高阶单元,精度要求低的次要部位用低阶单元。
不同阶次单元之间或采用特殊的过渡单元连接,或采用多点约束等式连接。
定义单元属性的操作主要包括定义单元类型、定义实常数和定义材料属性等。
在有限元分析过程中,如单元选择不当,直接影响到计算能否进行和结果的精度。
结构分析中的体载荷主要有温度分布载荷和惯性载荷。
ANSYS中提供了两个后处理器:通用后处理和时间历程后处理。
线性静力分析用于计算那些不包括惯性和阻尼效应的载荷结构或部件上引起的应力、位移、应变和力。
如果有限元模型本身具有对称或反对称的特性,则用户可以使用对称或反对称约束来简化模型。
动态分析是用来确定质量效应和阻尼效应起着重要作用时结构或构件动力学特性的技术。
在加权余量法中,若简单地利用近似解的试探函数序列作为权函数,这类方法称为伽辽金法有限元模型的建立可分为两种方法:直接法为直接根据机械结构的几何外型建立节点和元素,因此只适应于简单的机械结构系统;反之,间接法适应于节点及元素数目较多的复杂几何外型机械结构系统,该方法通过点、线、面、体积,先建立有限元模型,再进行实体网格划分,以完成有限元模型的建立。
有限元考试复习资料(华东交通大学)
有限元考试复习资料(含习题答案)1试说明用有限元法解题的主要步骤。
(1)离散化:将一个受外力作用的连续弹性体离散成一定数量的有限小的单元集合体,单元之间只在结点上互相联系,即只有结点才能传递力。
(2)单元分析:根据弹性力学的基本方程和变分原理建立单元结点力和结点位移之间的关系。
(3)整体分析:根据结点力的平衡条件建立有限元方程,引入边界条件,解线性方程组以及计算单元应力。
(4)求解方程,得出结点位移(5)结果分析,计算单元的应变和应力。
2.单元分析中,假设的位移模式应满足哪些条件,为什么?要使有限元解收敛于真解,关键在于位移模式的选择,选择位移模式需满足准则:(1)完备性准则:(2)连续性要求。
P210面简单地说,当选取的单元既完备又协调时,有限元解是收敛的,即当单元尺寸趋于0时,有限元解趋于真正解,称此单元为协调单元;当单元选取的位移模式满足完备性准则但不完全满足单元之间的位移及其导数连续条件时,称为非协调单元。
3.什么样的问题可以用轴对称单元求解?在工程问题中经常会遇到一些实际结构,它们的几何形状、约束条件和外载荷均对称某一固定轴,我们把该固定轴称为对称轴。
则在载荷作用下产生的应力、应变和位移也都对称此轴。
这种问题就称为轴对称问题。
可以用轴对称单元求解。
4.什么是比例阻尼?它有什么特点?其本质反映了阻尼与什么有关?答:比例阻尼:由于多自由度体系主振型关于质量矩阵与刚度矩阵具有正交性关系,若主振型关于阻尼矩阵亦具有正交性,这样可对多自由度地震响应方程进行解耦分析。
比例阻尼的特点为具有正交性。
其本质上反应了阻尼与结构物理特性的关系。
5.何谓等参单元?等参单元具有哪些优越性?①等参数单元(简称等参元)就是对坐标变换和单元内的参变量函数(通常是位移函数)采用相同数目的节点参数和相同的插值函数进行变换而设计出的一种单元。
①优点:可以很方便地用来离散具有复杂形体的结构。
由于等参变换的采用使等参单元特性矩阵的计算仍在单元的规则域内进行,因此不管各个积分形式的矩阵表示的被积函数如何复杂,仍然可以方便地采用标准化的数值积分方法计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有限元网格划分的基本原则有限元网格划分的基本原则划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。
为建立正确、合理的有限元模型,这里介绍划分网格时应考虑的一些基本原则。
1 网格数量网格数量的多少将影响计算结果的精度和计算规模的大小。
一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。
图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。
可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。
当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。
所以应注意增加网格的经济性。
实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。
图1 位移精度和计算时间随网格数量的变化在决定网格数量时应考虑分析数据的类型。
在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。
如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。
同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。
在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。
在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。
2 网格疏密网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。
在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。
而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。
这样,整个结构便表现出疏密不同的网格划分形式。
图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。
小圆孔附近存在应力集中,采用了比较密的网格。
板的四周应力梯度较小,网格分得较稀。
其中图b中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。
由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减小。
因此,网格数量应增加到结构的关键部位,在次要部位增加网格是不必要的,也是不经济的。
1图2 带孔方板的四分之一模型划分疏密不同的网格主要用于应力分析(包括静应力和动应力),而计算固有特性时则趋于采用较均匀的钢格形式。
这是因为固有频率和振型主要取决于结构质量分布和刚度分布,不存在类似应力集中的现象,采用均匀网格可使结构刚度矩阵和质量矩阵的元素不致相差太大,可减小数值计算误差。
同样,在结构温度场计算中也趋于采用均匀网格。
3 单元阶次许多单元都具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。
选用高阶单元可提高计算精度,因为高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以当结构形状不规则、应力分布或变形很复杂时可以选用高阶单元。
但高阶单元的节点数较多,在网格数量相同的情况下由高阶单元组成的模型规模要大得多,因此在使用时应权衡考虑计算精度和时间。
图3是一悬臂梁分别用线性和二次三角形单元离散时,其顶端位移随网格数量的收敛情况。
可以看出,但网格数量较少时,两种单元的计算精度相差很大,这时采用低阶单元是不合适的。
当网格数量较多时,两种单元的精度相差并不很大,这时采用高阶单元并不经济。
例如在离散细节时,由于细节尺寸限制,要求细节附近的网格划分很密,这时采用线性单元更合适。
图3 不同阶次单元的收敛情况增加网格数量和单元阶次都可以提高计算精度。
因此在精度一定的情况下,用高阶单元离散结构时应选择适当的网格数量,太多的网格并不能明显提高计算精度,反而会使计算时间大大增加。
为了兼顾计算精度和计算量,同一结构可以采用不同阶次的单元,即精度要求高的重要部位用高阶单元,精度要求低的次要部位用低阶单元。
不同阶次单元之间或采用特殊的过渡单元连接,或采用多点约束等式连接。
4 网格质量网格质量是指网格几何形状的合理性。
质量好坏将影响计算精度。
质量太差的网格甚至会中止计算。
直观上看,网格各边或各个内角相差不大、网格面不过分扭曲、边节点位于边界等份点附近的网格质量较好。
网格质量可用细长比、锥度比、内角、翘曲量、拉伸值、边节点位置偏差等指标度量。
划分网格时一般要求网格质量能达到某些指标要求。
在重点研究的结构关键部位,应保证划分高质量网格,即2使是个别质量很差的网格也会引起很大的局部误差。
而在结构次要部位,网格质量可适当降低。
当模型中存在质量很差的网格(称为畸形网格)时,计算过程将无法进行。
图4是三种常见的畸形网格,其中a单元的节点交叉编号,b单元的内角大于180°,c单元的两对节点重合,网格面积为零。
图4 几种常见的畸形网格5 网格分界面和分界点结构中的一些特殊界面和特殊点应分为网格边界或节点以便定义材料特性、物理特性、载荷和位移约束条件。
即应使网格形式满足边界条件特点,而不应让边界条件来适应网格。
常见的特殊界面和特殊点有材料分界面、几何尺寸突变面、分布载荷分界线(点)、集中载荷作用点和位移约束作用点等。
图5是具有上述几种界面的结构及其网格划分形式。
图5 特殊界面和特殊点网格划分6 位移协调性位移协调是指单元上的力和力矩能够通过节点传递相邻单元。
为保证位移协调,一个单元的节点必须同时也是相邻单元的节点,而不应是内点或边界点。
相邻单元的共有节点具有相同的自由度性质。
否则,单元之间须用多点约束等式或约束单元进行约束处理。
图6是两种位移不协调的网格划分,图a中的节点1仅属于一个单元,变形后会产生材料裂缝或重叠。
图b中的平面单元和梁单元节点的自由度性质不同,粱单元的力矩无法传递到平面单元。
图6 位移不协调的网格划分 37 网格布局当结构形状对称时,其网格也应划分对称网格,以使模型表现出相应的对称特性(如集中质矩阵对称)。
不对称布局会引起一定误差,如在图7中,悬臂粱截面相对y轴对称,在对称载荷作用下,自由端两对称节点1、2的挠度值本应相等。
但若分图b所示的不对称网格,计算出的y1=0.0346,y2=0.0350。
若改用图c所示的网格,则y1和y2完全相同。
图7 网格布局对计算结果的影响8 节点和单元编号节点和单元的编号影响结构总刚矩阵的带宽和波前数,因而影响计算时间和存储容量的大小,因此合理的编号有利于提高计算速度。
但对复杂模型和自动分网而言,人为确定合理的编号很困难,目前许多有限元分析软件自带有优化器,网格划分后可进行带宽和波前优化,从而减轻人的劳动强度。
45、分析完之后想查看之前的加载情况:PlotCtrl>Symbol,在其中选择要选择选择要显示的项目即可46、catia装配图导入ansys之前,先通过Tools>Generate CATPart from Product 将Product转化为Part,如果将Part导入ansys后丢失元素则需在Part中进行一下布尔相加运算再往ansys里导入,此外在装配图转零件图之前应对实体进行一下修改如去掉一些小孔、倒角或圆角,以便于ansys中进合理的网格划分提高分析精度;装配体导入ansys后(多个体)划分网格有三种方式:a、先GLUE,之后对每个体划分网格,粘接导致不能划分网格的利用连接(Concatenate)命令后再划分,此法粘接后对体映射或扫略划分网格有时不是很理想,对于各个体自由划分的装配体此法还是比较方便的;b、先add将所有体合为一体,再切割或不切割以实现映射划分网格;c、先对每个体单独进行网格划分(映射、扫略或自由都可以),之后利用约束耦合将各个体约束耦合在一起,常用到CEINTF命令,此约束命令比较方便,比较常用,应熟练掌握。
47、对复杂形状的体由面分割为几个立方体进行映射(mapped)网格划分时,注意可能会出现立方体不能映射划分的情况,原因应该是四方体的某些面上不具有相同的性质,可能四方体一个面由于和多个分体接触其实已被分割成个多个面,虽是四方体但并不是面对面而是面对多面,所以映射不了;其中一个比较麻烦的解决方法是把立方体切成很多小块,每块都满足映射网格划分的条件;如果不宜进行Bool“加”运算而有元素丢失的话,可以自己补上丢失的元素,另外转化为了零件但各个体是分离的,可以进行“粘接(Glue)“运算再划分网格;装配图转零件之后(不进行Bool“加”运算)有时会多出很多线(多余的线),如一个立方体6个面,每个面都会有4条边,本应12条边变成24条多出了12条,可以通过Delete>Lines Only(选择Pick All)删除多余的边,另外其它一些重叠元素还可以用Numbering>Merge Numbering进行合并编号;48、保存的文件路径不能有中文,否则之后用ANSYS打不开;确定某元素的编号时可以利用PlotCtrls>Numbering,也可以先利用某种操作如delete等选中在选取对话框中会显示编号记住然后取消“删除”操作;49、将catia文件导入ansys中后,会出现工作平面和实体平面(或直线)不重合或不垂直的情况,怎么让工作平面和实体平面重合?利用Align WPWith>Plane Normal to Line将工作平面垂直于实体某条边,这样在实体上画实体时才不会错;50、体扫略时可以通过MeshTool--Globe设定尺寸并可以通过layer来定扫描层数;体扫略和面网格拉伸为体网格的区别:面网格拉伸时体是不存在的,体扫描时体是存在的;网格划分在有限元分析中很重要,注意网格划分的一些基本操作方法、技巧和他人的经验;ansys网格划分:;话费、QQ币、游戏点卡充值:51、在对课题支架装配体体扫略划分网格时出现很多问题:a、设计时注意干涉问题,在导入ansys之前要注意检查一下可能的问题;b、装配体分析目前知道的方法有先粘接(Glue)再划分网格和先划网格再耦合或约束;c、先粘接再划分网格出现的问题是有的零件不能按自己想要的尺寸体扫略,有的总是扫略不了但有的却可以扫略;d、粘接后粘接处变为公共面这样较大面的体就会多一个面,较小面的体不变,所以出现大体不能体扫略而小体却能体扫略,将面合并后虽能划分网格但对粘接会不会有影响呢?;e、以后再遇到不能划分网格的情况时,先检查仔细检查体是否满足条件,如可通过List或Select检查体的面素组成;f、先粘接再划分网格和add整体后divide许多块后划分网格也有一些限制,就是必须在变截面处切割或粘接时在大截面处会多出一个切割面或粘接面,这时无法划分网格;52、在从catia的model文件往ANSYS导之前,要仔细检查model文件模型的细节是否有问题,这样在ansys分析中会避免很多麻烦;catia的model文件导入ansys之后也要检查模型,必要的合并图元及其编号;ansys改文件名不能像大多数软件那样直接在关闭软件情况下直接给文件重命名,只能通过软件中的Jobname对文件名进行修改;53、还是要注意一下ansys的单位统一问题;在ANSYS单位统一变换时,要将单位转换到量纲上,也就是将单位用kg——m——s表示)国际单位制中常用的单位名称长度力时间质量压力(压强)速度加速度密度Stress 杨氏模量单位m N s kg Pa m/s m/s^2 kg/m^3 Pa Pa 量纲m kgm/s^2 s kg kg/ms^2 m/s m/s^2 kg/m^3 kg/ms^2kg/ms^2注意尽量将尺寸转化为国际单位制下的尺寸,即使尺寸量是kg、m、s单位的尺寸量,这样弹性模量、密度等不用转化,而需转化的可能是模型的尺寸,利用放大和缩小即可(在Modeling>Operate>Scale下,并将原实体设置为Moved),最好在把几何模型建好后再利用scale否则对图元旋转和缩放操作时很麻烦;54、ansys求解时软件自动关闭解决:a、求解前点select>everything;b、查看一下.err文件,针对具体问题解决;c、求解空间和存储空间不足,扩充scrach space和database space,scrach space和database space的差值越大越好,点击ANSYS Product Launcher进入设置工作路径与工作名的界面,选择Customization(用户设置)标签,就可以看到这两个设置了;55、allocate:分配;Abridged Menu:缩减的菜单;stiffness:刚度,硬度;angular velocity:角速度;angular acceleration:角加速度;elastic:弹性的;plastic:可塑的;Rate Independent Plasticity:塑性与材料的应变率无关;Initial Condition:初始条件;gravity:万有引力,重力;spectrum:光谱、波谱;excitation:激励;seismic:地震的;Significant Threshold:有效阀值;coupled set:耦合集;adjacent region:邻近区域;stress-strain:应力-应变;56、ansys分析中最好先把角度单位改为“degree”;57、自由网格划分采用六面体单元时,六面体单元会自动退化为同阶次的四面体单元;混合网格划分时最好采用能形成金字塔过渡单元的六面体单元类型(而且能退化为四面体单元),这种单元类型有:结构单元solid95、solid186、visco89,热单元solid90,多物理场单元solid62、117、122;在张洪信的《有限元基础理论与ANSYS应用》的轮子受力分析实例中采用了混合网格划分方法:创建了两种单元类型:45号线性六面体单元和95号二次六面体单元,先映射网格划分部分选用45号单元,之后自由网格划分部分选用95号单元,此时六面体单元自动退化为四面体单元并在与映射网格接触处自动形成金字塔过度单元,之后利用“Modify Mesh”-“Change Tets”-“95 to 92”将退化的95号六面体单元转化为非退化的92号四面体单元,这样45号六面体单元和92号四面体单元通过“金字塔过度单元”协调的结合在了一起;58、映射网格划分要求有“规则的”形状:面有3或4条边,体有4,5或6个面;很多情况下模型的几何形状上有多于4条边的面,有多于6个面的体,为了将它们转换成规则的形状,可以进行如下一项或两项操作:a、把面或体切割成小的、简单的形状(可通过布尔减运算实现);b、连接两条或多条线或面以减少总的边数或面数,其实是把俩或三面当成一个面来看(通过Meshing-Concatenate-Lines或Areas实现);面映射网格时也可以拾取面上的3个或4个角点来暗示一个连接:在MeshTool上将3/4 sided变为Pick corners,按mesh键,拾取面,然后拾取3或4个角点形成一规则的形状;59、扫略网格划分两种方式:在已有体的三维模型上进行扫略,条件是三维模型上有完全一样的平行相对面;另一种方式是由面网格与拖拉成体网格,体网格建立后不要忘了将面网格删除掉;60、装配体分析划分网格方法:切割后两实体之间的关系和粘接两实体之间的关系对划分网格来讲是一样的:切割后一个实体变成两个实体,两个实体之间在切割处形成两个面分别为两个实体所有,注意切割后形成一个大件和一个小件时的情况和一个大件一个小件相粘接的情况一样;装配体分析时可以将各个零件粘接后划分网格,粘接后两实体的情况和切割后形成两个实体的情况一样,注意当一个大件和一个小件粘接在一起时在大件上会多生成一个面,如果两个件都是六面体,此时大件实际是7个面已不满足映射的条件可以自由划分网格,而小件仍满足故可以映射划分网格;另外多个复杂零件装配到一起后在ansys里可以先粘接,之后可对各个零件分别自由划分网格;如果想对其中的各个零件进行映射划分,可以先将各个零件粘接后再对各个零件进行切割直至满足映射条件,也可以先对各个零件切割最后在再粘接,不过明显前者更方便和效率更高,所以在对装配体进行网格划分时应先将各个零件粘接在一起,之后对各个零件进行网格划分或切割后再网格划分;一般情况下一直切割各个零件最后会满足映射条件;这样对各个小体切割且满足映射划分网格后,整个装配体就可以进行映射划分网格了;真是有些小体不满足映射条件时装配体划分网格就属于混合划分网格了,此时注意六面体过渡单元的选择并将退化的六面体单元转化为非退化的四面体单元(通过ModifyMesh”-“Change Tets”)以使分析精度更高!!精度要球不高时也可以先切割再粘接,切割之后将所有小体全部粘接在一起;粘接后划分网格和切割后划分网格实质是一样的,且最后整体划分网格后在接触处和粘接处不会破坏网格之间的协调性;粘接划分网格和切割后划分网格不同之处是:粘接不用考虑过渡单元的问题(无论什么类型的单元切割后粘接处总满足协调性),切割零件进行混合网格划分时需要考虑过渡单元问题;装配体粘接后一个体一个体的切割,对于每个体看哪部份不满足映射条件对哪部份在进行切割!!对于很复杂的模型切割时是有技巧的,从整体角度看看往往需要从一个面将能切到的所有实体切开,如果一点一点的切到后面可能会导致前面改切的没有切,所以最好利用Select--Entities选择好需要切的实体后进行“一刀切”;61、按上述方法粘接切割后如果外观上满足映射或扫掠的条件而不可以划分网格的话,就对细节进行检查,检查体的各个面及面上的线甚至点,查出问题后进行布尔操作修改,还不行的话将小块删除重新对小块建模;特别是CATIA或PROE模型导入ANSYS的情况会产生不少碎线或碎面(本来一条线或一个面被分割成几部分),此时将碎线或碎面add合并之后一般就可以划分网格了;62、用两个正方体100×100×100和50×50×50做了以下试验并得一些结论,小正方体放在大正方体上面的中间位置,在大立方体的底面加约束小立方体的顶面加均压力值取200:(可用此试验和72的试验比较)a、两个正方体不粘接放在一起可以各自映射划分网格,但求解时无法求解;所以需要粘接;(后面学了耦合和约束方程之后也可以通过节点耦合或约束来实现)b、两个立方体各自映射划分网格后可以粘接在一起,但求解释时出现错误,无法完成求解;所以需要先粘接再划分网格;c、两个立方体先粘接在一起,之后划分网格时小立方体可以映射划分网格,大立方体不能映射划分网格只能自由划分,原因明显是粘接后大立方体由7个面组成已不满足映射划分网格的条件,大立方体自由划分之后可以求解,结果最大变形DMX=0.881E-7;粘接后将大立方体的那两个面布尔add为一个面后可以进行映射网格划分但还是求解不了,因为实际上两面布尔相加后相当于取消了刚才的粘接;d、粘接后将下面的大立方体进行切割,之后可以对所有体(用pick all)进行整体映射划分网格,并且可以求解,求解结果最大变形DMX=0.870E-7;如果在切割之前加载,切割后被切割到的载荷会消失,所以只能在切割之后加载;整体映射网格划分后求解速度明显比前面非全部映射网格划分时的快很多;从求解结果看两种情况下的求解结果偏差很小;e、粘接后将下面的大立方体进行切割,之后将所有体glue粘接在一起,之后整体映射划分网格加载,最后的求解结果和d中的求解结果完全一样;f、对小立方体切割后,再沿着立方体两平行侧面的对称面将大小立方体整体切开,这样两立方体的粘接面就被切成两部分,之后整体映射划分网格并加载,最终求解结果最大变形DMX=0.871E-7;可见粘接面被切割开不会影响求解,对求解结果影响也很小;63、《ANSYS工程分析软件应用实例》,史亚杰,清华大学出版社.这本书讲的比较细!!在“有预应力作用结构的模态分析实例”中轮盘的盘心轴向和周向约束而径向放开,这种约束条件在直角坐标系下无法定义,而柱坐标下可以方便的定义;根据ANSYS软件中坐标系的定义规则,需要将柱坐标系的Z轴和旋转轴重合,Y轴表示转角(周向),X轴表示径向,ANSYS软件提供的全局坐标系不满足要求。