光学捷联惯导系统初始对准详解
捷联惯导系统SINS动基座初始对准39页PPT
6、法律的基础有两个,而且只有两个……公平和实用。——伯克 7、有两种和平的暴力,那就是法律和礼节。——歌德
8、法律就是秩序,有好的法律才有好的秩序。——亚里士多德 9、上帝把法律和公平凑合在一起,可是人类却把它拆开。——查·科尔顿 10、一切法律都是无用的,因为好人用不着它们,而坏人又不会因为它们而变得规矩起来。——德谟耶克斯
41、学问是异常珍贵的东西,从任何源泉吸 收都不可耻。——阿卜·日·法拉兹
42、只有在人群中间,才能认识自 己。——德国
43、重复别人所说的话,只需要教育; 而要挑战别人所说的话,则需要头脑。—— 玛丽·佩蒂博恩·普尔
44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
4Байду номын сангаас、自己的饭量自己知道。——苏联
捷联惯导初始对准以及姿态解算

第三部分:基于“存储数据与迭代计算对准”罗经法对准
3.2 罗经法对准过程中的调整策略(以北向通道为例)
g
y
f
p N
1
VN
1
s
R
-
K1
K2 R
K3 s
Control algorithm
cE -
x
1
s
x
-
ie cos L
z
实线所示的北向通道:本质上是一个休拉回路,失准角作无阻尼振荡。
采取的策略:1)引入内反馈环节(虚线)实现衰减振荡;2)引入前馈环节(点画 线)缩短振荡周期;3)引入积分环节(双点画线)消除罗经项的影响。
3.5 SINS罗经法对准如何实现迭代计算?
fˆNn -
b ib
fb cU
Cˆbn
Cˆbn
b ib
Cnbine
Cnbc
cN
fˆ n Cˆbn f b
1
VN
s
1
cE
R
K1
K2 R
K3 s
Control algorithm
上述过程中,可以实现迭代计算。
Page 15
第三部分:基于“存储数据与迭代计算对准”罗经法对准
导航坐标系 n (b)SINS
GINS中的测量数据直接反映失准角的大小; SINS中的测量数据不直接反映失准角;只有投影数据能够反映失准角的大小;相同 的测量数据经过不同的姿态矩阵进行投影,可以获取不同的投影数据。 注:上述均不考虑仪表误差。
对于SINS而言,分析一种理想的情况:仪表无误差,载体无机动,此时在整个对准 过程中,仪表测量数据均相等。整个对准过程,其实只用了一组仪表参数。
3.6 SINS罗经法对准中存储数据如何使用?
捷联惯导系统SINS动基座初始对准PPT共39页
捷联惯导系统SINS动基座初始对准
11、获得的成功越大,就越令人高兴 。野心 是使人 勤奋的 原因, 节制使 人枯萎 。 12、不问收获,只问耕耘。如同种树 ,先有 根茎, 再有枝 叶,尔 后花实 ,好好 劳动, 不要想 太多, 那样只 会使人 胆孝懒 惰,因 为不实 践,甚 至不接 触社会 ,难道 你是野 人。(名 言网) 13、不怕,不悔(虽然只有四个字,但 常看常 新。 14、我在心里默默地为每一个人祝福 。我爱 自己, 我用清 洁与节 制来珍 惜我的 身体, 我用智 慧和知 识充实 我的头 脑。 15、这世上的一切都借希望而完成。 农夫不 会播下 一粒玉 米,如 果他不 曾希望 它长成 种籽; 单身汉 不会娶 妻,如 果他不 曾希望 有小孩 ;商人 或手艺 人不会 工作, 如果他 不曾希 望因此 而有收 益。-- 马钉路 德。
捷联惯导系统静基座的高精度初始对准方法
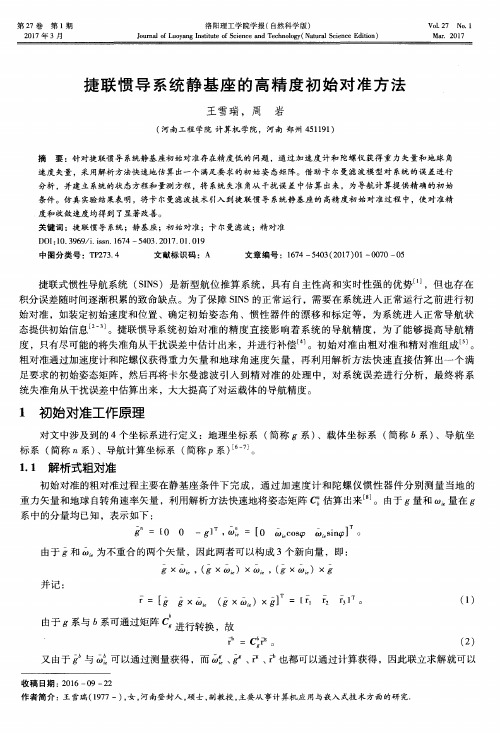
( b ) ~。
( 3 )
就 可获得 粗对 准结 果 ,即姿态矩 阵 c : 的初 始矩 阵 :
( g ) ( g )
_+
r C C z
=
C := 【 c = ( : )
( r ) T
_
( b )
—
I l C : C 。 :
r:【 罾 誊×
由于 g系与 b系可通 过矩 阵 C 进行 转换
( 誊× )×香 】 =[ r 一 2 r 一 3 】 。
,
( 1 )
故
r - b
=
c : 。
( 2 )
ቤተ መጻሕፍቲ ባይዱ
又 由于 与 可 以通 过测 量获 得 ,而 、 、 、 也 都 可 以通 过计 算获 得 ,因此 联立 求解 就可 以
第2 7卷
第 1期
2 0 1 7年 3月
洛 阳理 工 学 院学 报 ( 自然 科 学 版 ) J o u r n a l o f L u o y a n g I n s t i t u t e o f S c i e n c e a n d T e c h n o l o g y ( N a t u r a l S c i e n c e E d i t i o n )
Vo 1 . 2 7 No . 1 Ma L 2 01 7
捷 联 惯 导 系统 静 基座 的 高 精 度 初 始 对 准 方 法
王雪瑞 ,周 岩
( 河南工程 学院 计算机 学院,河南 郑州 4 5 1 1 9 1 )
摘
要 :针对捷联惯导 系统静基座初始对 准存在精 度低的 问题 ,通过加 速度 计和 陀螺仪获得 重力 矢量和地球 角
动基座条件下舰载武器捷联惯导系统初始对准研究

动基座条件下舰载武器捷联惯导系统初始对准研究随着现代化舰艇的不断发展,其中一项重要的技术就是舰载武器的捷联惯导系统。
这种系统将惯性导航系统和星载导航系统结合起来,能够提高武器的精度和可靠性,确保击中目标。
而在动基座条件下,捷联惯导系统的初始对准是实现高精度打击的重要前提。
动基座条件下的舰载武器捷联惯导系统与传统型号相比,需要额外考虑动基座的姿态确定和补偿问题。
在舰艇运动状态下,动基座将遇到多种力学干扰,如风浪、航行状态变化等。
为了获得准确的姿态信息,需要考虑惯性方程和传感器的实际误差,同时需要运用数学模型来消除干扰对姿态的影响,确保系统能够快速、准确地对准目标。
捷联惯导系统的初始对准是捷联系统实现高精度打击的重要前提。
捷联惯导系统的精度受多种因素影响,其中最关键的因素之一就是惯性传感器的初始对准误差。
初始对准误差会在系统使用过程中积累,导致系统的误差逐渐扩大,影响武器的精度和可靠性,因而需要采取适当的措施来解决。
在捷联惯导系统的初始对准过程中,主要考虑惯性导航系统和星载导航系统之间的配合和对准误差的消除。
一般情况下,捷联惯导系统会先采用星载导航系统进行粗略定位,再用惯性导航系统进行精细定位,以此来提高系统的定位精度。
但由于星载导航系统的精度受限,粗略定位可能会带来不可避免的误差,而大幅度运动也会导致惯性传感器的零偏误差,使得捷联惯导系统无法准确掌握自身姿态和位置信息,从而影响武器的打击结果。
因此,在动基座条件下,需要采取适当的初始对准方法,以提高捷联惯导系统的精度和可靠性。
传统的捷联惯导系统初始对准方法主要包括三种:心理想象矫正,静停地平线矫正和动基座矫正。
其中心理想象矫正是指利用心理想象方法计算偏差角,并根据偏差角通过动态调整惯性器件的参考坐标系来实现对准。
静停地平线矫正是指在静态条件下使用陀螺仪的水平度进行对准。
动基座矫正是指在动态条件下使用动基座姿态信息进行对准。
然而,这些传统的初始对准方法在动基座情况下都存在一定的局限性和缺陷。
惯导 惯性导航系统的初始对准资料

R
静基座惯导系统误差方程
对应的方块图为
主要内容
概述 静基座惯导系统误差方程 单回路的初始对准 陀螺漂移的测定 捷联式惯导系统的初始对准
若:假定载体 所在地的纬 度是准确知 道的
0 则:
静基座惯导系统误差方程
假定载体处于地面静止状态, 于是惯性导航系统误差方程式可简化为
2 sin V g A V E e N E 2 sin V g A V N e E N V N
惯性导航篇——惯性导航系 统的初始对准
主要内容
概述 静基座惯导系统误差方程 单回路的初始对准 陀螺漂移的测定 捷联式惯导系统的初始对准
主要内容
概述 静基座惯导系统误差方程 单回路的初始对准 陀螺漂移的测定 捷联式惯导系统的初始对准
概述
什么是初始对准? 初始对准有任务? 初始对准的类型?
什么是初始对准?
北向和东向 加速度计的 零位误差
R V N e cos e sin E R VE sin sin e e N R tan VE e cos e cos R
静基座惯导系统误差方程
假定载体处于地面静止状态, 于是惯性导航系统误差方程式可简化为
2 sin V g A V E e N E 2 sin V g A V N e E N V N
Байду номын сангаас
R V N e cos e sin E R VE sin sin e e N R tan VE e cos e cos R
为计算值与真 实值的之差
捷联惯导系统初始对准的参数辩识方法研究
鬲乞=碟石墨
对上式取转置:
(≯)r:(;”)7’四
(石弘㈥r四(1-2)
即
r
r
式中:
悖p 忙p = 『
『四
—。. . .L 趴,¨叫 1●●●j —.。.,.L “,¨叫 1●l●●j
孑6和∞--。b分别为三个轴的重力加速度分量和地速分量,并由捷联
加速度计和捷联陀螺仪测量。
由于初始对准时载体停在地面上,忽略载体的晃动影响,有
我国目前导弹的导航技术主要为惯性导航,而且越来越多地使用 捷联惯导,这主要是因为其体积小重量轻等特点。同时对其要求也越 来越高。特别是近几年尽管冷战结束,但新形式的战争/1i断出现,导 弹等武器成为战争的主角。因此对导弹的观念也随之改变,在现代战 争F,导弹不再是一种威慑武器,而是一种常规武器。这就要求导弹 具有高的精度和快速反应能力,而这一要求主要是针对惯导系统而言 的。
精对准方案如图1.1所示。对准的过程是:通过处理加速度计及陀
螺的输出值,提取出n’系相对n系的误差角≯,计算机产生一个与≯有关 的修正指令CO。d,参与姿态矩阵C:’的计算,使≯尽可能减小。
E,zg轴指向下,1j13D。
2)载体坐标系(b系)
、
用OXbYbZb表示,原点为载体重心,Xb轴沿载体横轴向前,Yb
轴沿载体重心向右,zb轴沿载体向下,该坐标系与载体固联。
3)导航坐标系(n系)
用OXnYnZn表示,它是惯导系统在求解导航参数时所用的坐
标。一般采用地理坐标系。
4)计算导航坐标系(n 7)
It can get the velocity through matrix change from bedy coordinate to navigation coordinate for the s仃apdown inertial navigation system.It
动基座条件下舰载武器捷联惯导系统初始对准研究
动基座条件下舰载武器捷联惯导系统初始对准研究摘要:在舰载武器系统中,捷联惯导系统具有重要的作用。
捷联惯导系统的初始对准是系统正常工作的关键。
本文通过分析捷联惯导系统的工作原理,介绍了动基座条件下捷联惯导系统的初始对准方法,并对其影响因素进行了研究。
1. 引言舰载武器系统中的捷联惯导系统是一种通过惯性测量单元和全局导航卫星系统接收机联合工作,使武器系统能够在没有外界参考的情况下进行精确定位、导航和打击的系统。
捷联惯导系统的初始对准是保证系统有效工作的重要环节。
2. 捷联惯导系统的工作原理捷联惯导系统由惯性导航单元、全球定位系统接收机以及姿态传感器等部件组成。
惯性导航单元通过测量加速度和角速度信息来计算舰艇的位置和姿态。
全球定位系统接收机通过接收卫星信号,确定舰艇的位置。
姿态传感器用于检测舰艇的姿态角。
3. 动基座条件下捷联惯导系统的初始对准方法在动基座条件下,舰载武器系统的捷联惯导系统初始对准可以通过以下步骤完成:步骤一:舰艇静止时,进行GPS和惯性泌言的初始对准。
通过接收全球定位系统的信号,确定舰艇的粗略位置,并使用惯性传感器测量舰艇的加速度和角速度信息。
步骤二:舰艇开始运动后,启动捷联惯导系统,并利用姿态传感器获取舰艇的姿态角。
然后,通过惯性导航单元计算舰艇在初始位置的惯性坐标系中的位置。
步骤三:根据舰艇的惯性坐标系和全球定位系统的坐标系之间的坐标变换关系,可以确定舰艇在全局坐标系中的位置。
然后,将舰艇的位置信息与导航指令进行比较,利用闭环控制算法对舰艇进行修正。
4. 影响因素分析动基座条件下捷联惯导系统的初始对准精度受多个因素影响,主要有以下几点:舰艇运动状态:舰艇运动过程中,加速度和角速度的变化会对捷联惯导系统的初始对准精度产生影响。
舰艇运动越大,精度越低。
姿态传感器精度:姿态传感器用于检测舰艇的姿态角,其精度将直接影响到捷联惯导系统的初始对准精度。
全球定位系统精度:全球定位系统接收机的精度也是影响捷联惯导系统初始对准精度的一个重要因素。
惯导系统的初始对准
z
YP
Yg Xg
ZXP
方位对准原理 2、罗经效应 (1)cos 产生原因
方位对准原理
(1) z cos
产生原因
方位对准原理
(2)zcos 的作用
方位对准原理
对准精度:水平精度达10角秒左右 方位精度2~5角分
对准时间:几至十几分钟以内
对准的基本概念 4、方法及分类:
(1)自主式对准:静基座 (2)传递对准:动基座 (3)空中对准:组合导航
对准的基本概念 5、对准过程:
粗对准:对准时间是主要指标
精对准:对准精度是主要指标
平台锁定
一种快速拉平和定向过程。惯导系统利用自 身设备,将平台用机械的方法,使平台近似趋于 水平和定向,不致使平台环架偏离要求角度过大。
c x
Mc x
x ←平台转动←稳定回路
水平对准的实质是通过加速度计敏感 重力加速度分量。即通过垂直找水平。
水平对准原理
水平对准原理
2、水平对准回路分析
g
▽y(s)
+ Vy +
1/S
1/R -
x + x 1/S -
x0
+
x(s)
闭环传递函数
zcos
1
1
1
A(s) Rs2 R R
1
g Rs2
误差方程及其简化 简化的指北系统误差方程:
Vy
x g
y
Vx y g x
x
Vy
R
z cos
x
y
Vx
R 通道
水平对准原理 1、水平对准基本原理
▽y(s) + + Vy 1/S
g x
惯导惯性导航系统初始对准
E
VE
R
e sin
N
tan
R
VE
e
cos
惯导惯性导航系统初始对准
静基座惯导系统误差方程
对应的方块图为
惯导惯性导航系统初始对准
主要内容
概述 静基座惯导系统误差方程 单回路的初始对准 陀螺漂移的测定 捷联式惯导系统的初始对准
惯导惯性导航系统初始对准
单回路的初始对准
水平对准 方位对准
惯导惯性导航系统初始对准
惯导惯性导航系统初始对准
单回路的初始对准—水平精对准
得到简化后的方块图为
惯导惯性导航系统初始对准
单回路的初始对准—水平精对准
水平精对准的控制思想,就是在上述回 路的基础上,增加必要的阻尼,在给定
的时间内,使平台偏差角α 和小于给定
值。 方案:三阶水准水平对准
惯导惯性导航系统初始对准
单回路的初始对准—水平精对准
惯导惯性导航系统初始对准
陀螺漂移的测定—水平陀螺漂移 的测定
两位置法测量水平陀螺漂移
第一个位置就是惯导平台正常的导航位置
其初始对准回路主要是东向陀螺敏感东向角速 度,北向陀螺敏感北向角速度。
东向加速度计的输出信号经过校正环节馈人北 向陀螺的输入端,而北向加速度计的输出信号 经过校正环节馈人东向陀螺的输入端。
惯导惯性导航系统初始对准
捷联式惯导系统的初始对准
解析粗对准原理
V N R
VN R
e cos
e sin
E
VE R
e sin
e sin
N
tan R
VE
e cos
e cos
若:假定载体 所在地的纬 度是准确知 道的
则: 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VN
VU
E N
U
b b b Bx By Bz
Cbn
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
把上式改写成矩阵形式:
g b T g n T n b T n T ie ie Cb b n b T n T g ie g ie
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
对准中仅将陀螺漂移和加速度零偏的 随机常数部分列入状态:
b Bi 0,(i x, y, z )
b i 0,(i x, y, z )
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
取状态变量为:
X VE
按基座运动状态的不同:
静基座对准
动基座对准
北京航空航天大学仪器科学与光电工程学院
6.1 捷联惯导系统初始对准基本原理
初始对准的分类及要求
按对外信息需求的不同:
自主式对准
非自主式对准
北京航空航天大学仪器科学与光电工程学院
6.1 捷联惯导系统初始对准基本原理
初始对准的分类及要求
自主式对准指惯导系统依靠重力矢量和地球自
b 的测量值 b 由于在载体系中只能得到 g b 和 ie g
b 和 ie ,按照上式只能计算出 Cbn 的估计值 Cbn 。
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
精对准
经过粗对准后,得到的初始捷联矩阵还不准确,即存在姿 态误差,精对准阶段就是要对姿态角误差做出估计并进行修正, 从而获得准确的捷联矩阵。可以基于第四章和第五章述及的误 差方程和卡尔曼滤波进行姿态误差估计和修正。
6.1 捷联惯导系统初始对准基本原理 6.2 自对准技术
6.3 传递对准技术
北京航空航天大学仪器科学与光电工程学院
6.1 捷联惯导系统初始对准基本原理
惯性导航系统是一种积分推算系统,这就需要预先给定积
分初始值(包括位置、速度和姿态)。
载体的位置与速度初值较易得到,如在静止状态下开始导
航时,初始速度为零,也可利用外部数据直接装订。
b T b 1 由于C b 是正交矩阵,存在关系 Cn Cn Cbn ,对上式各
n
式分别转置得:
g g C C g g
b T n T n b b T ie b n T ie n b b T ie n
n T ie
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
直接得到姿态矩阵:
g n n T Cb ie n n T g ie
n T 1
g b T b T ie b b T g ie
6.2 自对准技术
解析式粗对准
粗对准阶段的首要要求是快速性,对精度的要求较低。在进
行解析式粗对准时,要求载车静止,同时要求当地的经度、纬 度为已知量。 这样,重力加速度g和地球自转角速率在导航坐 标系中的分量是确定的常值,在载体坐标系中的分量也可以通 过惯性器件测得。通过惯性器件的测量值可以直接计算出初始 捷联矩阵。
C (I )C
n b
n b
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
略去惯性器件的刻度系数误差和安装误差,速 度和姿态误差方程为:
b b VE gN VN 2ie sin L VU 2ie cos L T11b T T x 12 y 13 z b b VN gE VE 2ie sin L T21b T T x 22 y 23 z b b VU VE 2ie cos L T31b T T x 32 y 33 z b b b E U ie cos L N ie sin L T11 Bx T12 By T13 Bz b b b N Eie sin L T21 Bx T22 By T23 Bz b b b E Eie cos L T31 Bx T32 By T33 Bz
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
根据载体系和导航系之间的坐标变换关系,可以得到以下三个
关系式:
b n g b Cn g b b n ie Cn ie
b b n n g b ie Cn g ie
北京航空航天大学仪器科学与光电工程学院
6.2 自对准技术
转角速度矢量就可实现对准,而不需要其他外部 信息;
非自主式对准指引入外部姿态信息或通过引入外
部主惯导的导航信息(即传递对准)等方法来完
成的初始对准。
北京航空航天大学仪器科学与光原理
初始对准的分类及要求
初始对准的两项重要指标 对准时间
对准精度
北京航空航天大学仪器科学与光电工程学院
北京航空航天大学仪器科学与光电工程学院
光学惯性测量与导航系统
Optic Inertial Measurement & Navigation System
主
讲: 杨功流 教授 晁代宏 讲师
张小跃 讲师
电 话: 9664,6542-823
北京航空航天大学仪器科学与光电工程学院
第六章 光学捷联惯导系统初始对准
初始姿态值相对而言较难得到,这时需依赖惯导系统的初
始对准过程来实现。
初始对准的精度、对准时间直接影响导航系统精度和准备
时间,所以初始对准技术一直是惯导系统的关键技术之一。
北京航空航天大学仪器科学与光电工程学院
6.1 捷联惯导系统初始对准基本原理
初始对准的分类及要求
初始对准一般可分为以下几类: