倒立摆控制系统设计matlab
倒立摆模糊控制MATLAB

模糊控制课程设计报告题目:基于matlab的倒立摆模糊控制专业、班级:09级电气四班学生姓名:学号:指导教师:分数:2012年 6 月15 日绪论倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论设计及测试的理想实验平台。
倒立摆系统控制涉及到机器人技术、控制理论、计算机控制等多个领域。
其被控系统本身是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究[1]。
同时,由于实际机械系统中存在的各种摩擦力,实际倒立摆系统亦具有一定的不确定性。
倒立摆系统的控制涉及到许多典型的控制问题:非线性问题、随动及跟踪问题、鲁棒性问题、非最小相位系统的镇定问题等等。
正是由于倒立摆系统的特殊性,许多不同领域的专家学者在检验新提出理论的正确性和实际可行性时,都将倒立摆系统作为实验测试平台。
再将经过测试后的控制理论和控制方法应用到更为广泛的领域中去[1]。
如:把一级倒立摆的研究成果应用到对航空航天领域中的火箭发射推进器和卫星飞行状态控制的研究;把二级倒立摆的研究成果应道到双足机器人行走控制中[2]。
所以说,对倒立摆系统控制理论的研究不仅具有理论研究价值,也具有相当的实际工程应用价值。
倒立摆系统的传统控制方法主要是使用经典控制理论和现代控制理论。
它们都以精确的系统数学模型为控制对象。
经典控制理论在线性定常、输入输出量较少的系统中能很好的完成控制设计指标,经典控制理论的数学基础是拉普拉斯变换,占主导地位的分析和综合方法是频率域方法。
而现代控制理论是建立在状态空间分析法上的,基本分析方法是时域分析法。
这种方法能够克服经典控制理论的缺陷:能够解决系统的输入输出变量过多、系统的非线性等问题。
MATLAB配置倒立摆系统极点

现代控制理论MATLAB计算学院:电气工程学院专业班级:电气工程及其自动化1403班学生:王宁学号:140301308摘要:讨论了采用MATLAB语言编程实现控制系统的空间状态方程模型建立,及离散化,判断能控性,能观性,阶跃响应,实现控制系统极点任意配置。
并以倒立摆系统为实例计算。
关键词:空间状态方程;控制系统;极点配置目录一.绪论3〔1〕MATLAB及其控制系统工具箱简介3〔2〕状态反应极点配置3〔3〕能控性和能观性3〔4〕MATLAB编程3二.MATLAB计算5〔1〕状态空间方程5〔2〕求解离散化x(t)6〔3〕阶跃响应6〔4〕判断能控性能观性7〔5〕极点配置7〔6〕结论9三.总结9一.绪论〔1〕MATLAB及其控制系统工具箱简介MATLAB是一套高性能的数值计算和可视化软件,具有工程计算,算法研究,符号运算,建模和仿真,原形开发,数据分析及可视化,科学和工程绘图,应用程序设计等功能,MATLAB包含了涉及多种学科的众多工具。
其中,控制系统工具箱主要处理以传递函数为主要特征的经典控制和以状态方程为特征的现代控制中的问题,为用户提供了用于处理和分析线性时不变〔LTI〕模型,它支持连续系统和离散系统,单输入单输出〔SISO〕系统和多输入多输出〔MIMO〕系统。
利用该工具箱中的函数不但可以实现系统模型的建立,转换,分析和处理,还可以进展控制系统的设计。
〔2〕状态反应极点配置状态空间中的极点配置设计方法是根本的设计方法之一。
如果系统是完全状态可控的,那么,要求的Z平面上闭环极点可以选择,并且,以这些极点为闭环极点的系统可以设计。
这种在Z平面设置期望的闭环极点的设计方法,称为极点配置设计法。
在极点配置设计方法中,将反应全部状态变量,使得全部闭环极点均设置在各期望的位置上。
然而,实际的控制系统中,量测到全部[4]状态变量是不可能的,不是全部状态变量都可以用于反应。
为了实现状态反应,估计这些未知的状态变量是很必要的,这种估计可以用状态观测器进展。
matlab仿真毕设--倒立摆现代控制理论研究
内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:倒立摆现代控制理论研究倒立摆现代控制理论研究摘要倒立摆系统是一个复杂的非线性、强耦合、多变量和自不稳定系统。
在控制工程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪性等许多控制中的关键问题,是检验各种控制方法的理想工具。
理论是工程的先导,它对倒立摆系统的控制研究具有重要的工程背景,单级倒立摆与火箭的飞行有关,二级倒立摆与双足机器人的行走有相似性,日常生活中的任何重心在上,支点在下的问题都与倒立摆的控制有极大的相似性,所以对倒立摆的稳定控制有重大的现实意义。
迄今,人们已经利用古典控制理论、现代控制理论及多重智能控制理论实现了多种倒立摆系统的稳定控制[5]。
倒立摆的控制方法有很多,如状态反馈控制,经典PID控制,神经网络控制,遗传算法控制,自适应控制,模糊控制等。
其控制方法已经在军工、航天、机器人和一般工业过程等领域得到了应用。
因此对倒立摆系统的控制研究具有重要的理论和现实意义,成为控制领域中经久不衰的研究课题。
本文是应用线性系统理论中的极点配置、线性二次型最优(LQR)和状态观测器等知识,设计了倒立摆系统线性化模型的控制器,通过MA TLAB仿真,研究其正确性和有效性。
通过分析仿真结果,我们知道了,状态反馈控制可以使倒立摆系统很好的控制在稳定状态,并具有良好的鲁棒性。
关键词:倒立摆;现代控制;Matlab仿真;Modern Control Theory Of Inverted PendulumAbstractInverted pendulum system is a complex nonlinear and strongly coupled,multi-variable and unstable system since.In control engineering,it can effectively reflect such stabilization,robustness,with the mobility of control and tracking,and many other key issue,It is the test ideal for a variety of control methods.Theory is the project leader,inverted pendulum control system also has important engineering research background,inverted pendulum with single-stage related torocket for the flight,Inverted pendulum and biped walking robot similar nature in any life in the center of gravity,the fulcrum in the next issue with the inverted pendulum control has a great similarity,so the stability control of inverted pendulum significant practical significance.So far,it has been the use of classical control theory,modern control theory and control theory of multiple intelligence to achieve a variety of inverted pendulum system stability control[5].Inverted pendulum control methods there are many,such as the state feedback control,the classic PID control,neural network control,genetic algorithm control,adaptive control,fuzzy control.The control method has been in military,aerospace,robotics and general industrial processes and other areas have been intended use.Therefore,the control of inverted pendulum system research has important theoretical and practical significance,of becoming enduring research topics in the field.This is the application of the theory of linear systems pole placement,linear quadratic optimal (LQR) and the state observer of such knowledge,the design of the linear inverted pendulum model of the controller,through simulation to study the correctness and effective sex.By analyzing the results of MATLAB simulation,state feedback control can make a goodcontrol of inverted pendulum system in a stable state,and has good robustness,stability control features.Key words: Inverted pendulum;Modern control;Matlab simulation;目录摘要 (I)Abstract (II)第一章绪论 (1)1.1倒立摆系统模型简介 (1)1.2倒立摆研究的背景与意义 (2)1.3国内外研究现状、水平和发展趋势 (3)1.3.1倒立摆和控制理论的发展 (3)1.3.2倒立摆的控制方法 (4)1.3.3倒立摆的发展趋势 (5)1.4本论文的主要工作介绍 (6)第二章一级倒立摆的数学模型建立及其性能分析 (7)2.1 系统的组成 (7)2.2 一级倒立摆数学模型的建立 (8)2.2.1 数学模型的建立 (8)2.2.2 系统的结构参数 (9)2.2.3 用牛顿力学方法来建立系统的数学模型 (9)2.2.4 一级倒立摆的性能分析[7] (13)2.3 本章小结 (15)第三章现代控制理论在倒立摆控制中的应用 (16)3.1 自动控制理论的发展历程 (16)3.2 经典控制理论 (18)3.2.1 PID控制现状 (18)3.2.2 PID控制的基本原理 (18)3.2.3 常用PID数字控制系统 (20)3.3 现代控制理论 (21)3.3.1 极点配置[11] (22)3.3.2 线性二次型最优的控制理论[7,8] (24)3.3.3 加权矩阵的选取 (26)3.3.4 状态观测器[7] (26)3.4 本章小结 (29)第四章MA TLAB仿真技术 (30)4.1 仿真软件——Matlab简介 (30)4.1.1 MA TLAB的优势 (30)4.2 Simulink简介 (32)4.3 S-函数简介 (33)4.3.1 用M文件创建S-函数 (34)4.4 倒立摆仿真模块的建立 (36)4.5 本章小结 (37)第五章一级倒立摆线性模型系统的仿真 (38)5.1 倒立摆控制器结构选择 (38)5.2 一级倒立摆线性模型系统仿真 (38)5.2.1 Simulink仿真 (42)5.3 本章小结 (46)结束语 (48)参考文献 (49)附录A (51)致谢 (53)第一章绪论1.1倒立摆系统模型简介倒立摆控制系统是一个复杂的、不稳定的、非线性的系统,是进行控制理论教学及开展各种控制实验的理想实验平台,但它并不是我们想象的那样抽象,其实在我们日常生活中就有很多这样的例子。
单倒置摆控制系统的状态空间设计及MATLAB仿真

单倒置摆控制系统的状态空间设计及MATLAB仿真单倒置摆控制系统的状态空间设计及MATLAB仿真是一个被广泛使用的控制方法,它可以帮助我们在控制不同的系统时获得最佳的性能。
一、单倒置摆控制系统的状态空间设计1、介绍单倒置摆控制系统的状态空间设计是一种将系统描述为状态空间的方法,通过对系统模型的分析和控制策略的设计,它可以帮助我们获得最优的控制性能。
2、原理状态空间设计的原理是将系统描述为一系列状态变量,然后根据系统的特性和性能要求,采用状态变量和控制变量来控制系统行为。
3、步骤(1)确定系统模型:首先,根据系统的特性和性能要求,确定系统的模型参数,如系统的重量,惯性,摩擦系数等;(2)确定状态变量:其次,根据系统模型,确定状态变量,如位置,速度和加速度等;(3)确定控制变量:然后,根据系统模型,确定控制变量,如外力,摆动角度和摆动速度等;(4)设计控制策略:最后,根据系统的性能要求,确定控制策略,如PID控制,滑模控制等。
二、MATLAB仿真1、准备工作由于MATLAB中提供了一套完整的控制设计工具,可以节省大量的时间,所以在开始MATLAB仿真之前,首先需要准备相应的系统模型和控制变量,以及控制策略。
2、模拟接下来,使用MATLAB中提供的控制设计工具,通过模拟不同的控制策略,可以比较不同控制策略的效果,并选择最佳的控制策略。
3、仿真当控制策略设计完成后,可以使用MATLAB中的仿真工具,通过仿真不同的系统参数,来验证控制策略的性能。
通过仿真,可以检验控制策略是否能够达到设定的目标。
四、总结单倒置摆控制系统的状态空间设计及MATLAB仿真是一种经常被使用的控制方法,它首先要求确定系统模型,然后根据系统的特性和性能要求,采用状态变量和控制变量来控制系统行为,最后再使用MATLAB进行仿真,比较不同控制策略的效果,选择最佳的控制策略。
倒立摆MATLAB建模
Matlab程序设计上交作业要求:1)纸质文档:设计分析报告一份(包括系统建模、系统分析、系统设计思路、程序及其执行结果)。
2)Matlab程序:按班级统一上交后备查。
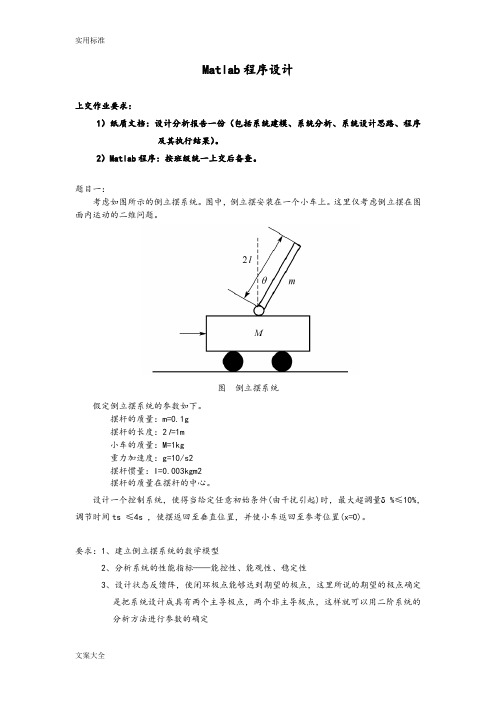
题目一:考虑如图所示的倒立摆系统。
图中,倒立摆安装在一个小车上。
这里仅考虑倒立摆在图面内运动的二维问题。
图倒立摆系统假定倒立摆系统的参数如下。
摆杆的质量:m=0.1g摆杆的长度:2l=1m小车的质量:M=1kg重力加速度:g=10/s2摆杆惯量:I=0.003kgm2摆杆的质量在摆杆的中心。
设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。
要求:1、建立倒立摆系统的数学模型2、分析系统的性能指标——能控性、能观性、稳定性3、设计状态反馈阵,使闭环极点能够达到期望的极点,这里所说的期望的极点确定是把系统设计成具有两个主导极点,两个非主导极点,这样就可以用二阶系统的分析方法进行参数的确定4、用MATLAB 进行程序设计,得到设计后系统的脉冲响应、阶跃响应,绘出相应状态变量的时间响应图。
题目二:根据自身的课题情况,任意选择一个被控对象,按照上题所示步骤进行分析和设计,并给出仿真程序及其执行结果。
题目一:考虑如图所示的倒立摆系统。
图中,倒立摆安装在一个小车上。
这里仅考虑倒立摆在图面内运动的二维问题。
图倒立摆系统假定倒立摆系统的参数如下。
摆杆的质量:m=0.1g摆杆的长度:2l=1m小车的质量:M=1kg重力加速度:g=10/s2摆杆惯量:I=0.003kgm2摆杆的质量在摆杆的中心。
设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。
要求:1、建立倒立摆系统的数学模型2、分析系统的性能指标——能控性、能观性、稳定性3、设计状态反馈阵,使闭环极点能够达到期望的极点,这里所说的期望的极点确定是把系统设计成具有两个主导极点,两个非主导极点,这样就可以用二阶系统的分析方法进行参数的确定4、用MATLAB 进行程序设计,得到设计后系统的脉冲响应、阶跃响应,绘出相应状态变量的时间响应图。
自基于ADAMS与MATLAB联合仿真的倒立摆设计毕业论文

基于ADAMS与MATLAB联合仿真的倒立摆设计摘要:倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
倒立摆的控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
本文先分别用MATLAB和ADAMS两种软件对倒立摆系统进行建模仿真,然后将两者联合仿真,采用PID控制,用三种方法实现了对倒立摆系统的的控制。
仿真结果互相对比、补充,充分展现了各种仿真方法的特点,并直观的论证出利用两种软件进行联合仿真的优点和意义。
关键词:ADAMS;MATLAB;倒立摆;联合仿真Design ofinverted pendulum basedon the co-simulationof ADAMSand MATLABAbstract:The controlof invertedpendulumsystem is a nonlinear,complex,unstable,system,It’sanideal experimental plat form of control theoryteaching and carryingout ofvarious control experiments. Control methodsofinverted pendulum are widelyused inmilitary, aerospace, robotics and general industrial fields, such as robot balance control in rocket launch,theverticality control and satellite flight attitudecontrol.This paper first respecti vely by MATLAB and ADAMS for modeling and Simulation ofthe i nvertedpendulum system, andthen combining the twofor co-simulation.Withthe PID control, the control ofinvertedpendulum system arerealizedby threemethods. The simulationresu lts contrast andcomplement each other,fully demonstrated the ch aracteristics of various simulation methods, and intuitive provesthe advantages andsignificanceofcombined simulation using this twokinds ofsoftware.Key words: ADAMS,MATLAB,inverted pendulum, co-simulationﻬ目录第1章绪论1ﻩ1.1 课题研究背景与意义1ﻩ1.2国内外发展现状1ﻩ1.3本论文主要内容.................................................................................................. 2ﻩ2.1建模方法的选择3ﻩ2.2 倒立摆系统模型3ﻩ2.3 控制方法的选择6ﻩ2.4PID算法简介.................................................................................................... 6本章小结ﻩ错误!未定义书签。
基于matlab的倒立摆模糊控制课程设计报告

基于matlab的倒立摆模糊控制课程设计报告智能控制理论及应用课程设计报告题目:基于matlab的倒立摆模糊控制院系:西北民族大学电气工程学院专业班级:10级自动化(3)班学生姓名:蔡余敏学号:P101813455指导教师:刁晨2013.10基于MATLAB的倒立摆模糊控制作者:蔡余敏指导老师:刁晨摘要:倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
本文主要针对较为简单的单级倒立摆控制系统而进行的设计分析。
通过建立微分方程模型,求出相关参数,设计出对应的模糊控制器,并运用MATLAB软件进行系统模型的软件仿真,从而达到预定控制效果。
目前,一级倒立摆的研究成果应用于火箭发射推进器和控制卫星的飞行状态等航空航天领域。
关键词:单级倒立摆;微分方程;模糊控制;MATLAB仿真1背景分析倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
正是由于倒立摆系统的特殊性,许多不同领域的专家学者在检验新提出理论的正确性和实际可行性时,都将倒立摆系统作为实验测试平台。
再将经过测试后的控制理论和控制方法应用到更为广泛的领域中去。
现代控制理论已经在工业生产过程、军事科学、航空航天等许多方面都取得了成功的应用。
例如极小值原理可以用来解决某些最优控制问题;利用卡尔曼滤波器可以对具有有色噪声的系统进行状态估计;预测控制理论可以对大滞后过程进行有效的控制。
倒立摆系统建模及MATLAB仿真

倒立摆系统的建模及MATLAB仿真通过建立倒立摆系统的数学模型,应用状态反馈控制配置系统极点设计倒立摆系统的控制器,实现其状态反馈,从而使倒立摆系统稳定工作。
之后通过MA TLAB 软件中Simulink工具对倒立摆的运动进行计算机仿真,仿真结果表明,所设计方法可使系统稳定工作并具有良好的动静态性能。
倒立摆系统是1个经典的快速、多变量、非线性、绝对不稳定系统,是用来检验某种控制理论或方法的典型方案。
倒立摆控制理论产生的方法和技术在半导体及精密仪器加工、机器人技术、导弹拦截控制系统和航空器对接控制技术等方面具有广阔的开发利用前景。
因此研究倒立摆系统具有重要的实践意义,一直受到国内外学者的广泛关注。
本文就一级倒立摆系统进行分析和研究,建立倒立摆系统的数学模型,采用状态反馈极点配置的方法设计控制器,并应用MA TLAB 软件进行仿真。
1 一级倒立摆系统的建模1. 1 系统的物理模型如图1 所示,在惯性参考系下,设小车的质量为M ,摆杆的质量为m ,摆杆长度为l ,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为θ,作用在小车上的水平控制力为f 。
这样,整个倒立摆系统就受到重力,水平控制力和摩擦力的3 外力的共同作用。
图1 一级倒立摆物理模型1. 2 系统的数学模型在系统数学模型中,本文首先假设:(1) 摆杆为刚体。
(2)忽略摆杆与支点之间的摩擦。
(3)忽略小车与导轨之间的摩擦。
然后根据牛顿第二运动定律,求得系统的运动方程为:方程(1) , (2) 是非线性方程,由于控制的目的是保持倒立摆直立,在施加合适的外力条件下,假定θ很小,接近于零是合理的。
则sinθ≈θ,co sθ≈1 。
在以上假设条件下,对方程线性化处理后,得倒立摆系统的数学模型:1. 3 系统的状态方程以摆角θ,角速度θ',小车的位移x ,速度x'为状态变量,输出为y 。
即令:则一级倒立摆系统的状态方程为:2 控制器设计及MATLAB 仿真2. 1 极点配置状态反馈的基本原理图2 状态反馈闭环控制系统极点配置的方法就是通过一个适当的状态反馈增益矩阵的状态反馈方法,将闭环系统的极点配置到任意期望的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
倒立摆控制系统设计matlab
倒立摆控制系统设计是一个在工程领域中非常重要的课题。
倒立摆是一个经典的控制系统问题,通过控制电机的力矩来使倒立摆保持平衡。
在这篇文章中,我们将使用Matlab来设计一个倒立摆控制系统,并逐步回答其中的关键问题。
首先,我们需要明确设计的目标。
在倒立摆控制系统中,我们的目标是使摆杆保持垂直位置。
为了实现这个目标,我们需要采用逆向控制方法,即通过测量摆杆当前状态以及目标状态之间的差异,并控制力矩,从而使摆杆回复到垂直位置。
接下来,我们需要构建倒立摆的模型。
倒立摆模型可以采用Euler-Lagrange动力学方程进行描述。
具体地,我们可以使用如下的动力学方程来描述倒立摆:
m*L^2*θ''(t) + m*g*L*sin(θ(t)) = u(t) - b*θ'(t) - c*sat(θ(t)) 其中,m是摆杆的质量,L是摆杆的长度,θ(t)是摆杆的角度,u(t)是电机的力矩,b是摩擦系数,c是控制器增益。
在上述动力学方程中,μ(t)表示补偿力,其作用是抵消由于重力引起的非线性成分。
有了动力学方程之后,我们可以使用Matlab来进行数值仿真。
首先,我们需要定义模型的初始状态和控制器增益。
我们可以选择一个合适的初始状态,比如θ(0)=pi/4,θ'(0)=0,然后根据模型的特性来选择控制器增益c。
接下来,我们可以使用Matlab的ode45函数来求解动力学方程的数值解。
ode45函数是一种常用的数值积分器,可以对常微分方
程进行数值求解。
在本例中,我们可以将动力学方程与初始条件传递给ode45函数,然后使用该函数来求解摆杆的角度θ(t)和角速度θ'(t)的变化。
在求解得到角度和角速度之后,我们可以使用反馈控制方法来设计控制器。
一种常见的控制器设计方法是使用PID控制器。
PID控制器基于当前状态与目标状态之间的差异来计算控制信号。
具体地,PID控制器的输出可以通过如下公式来计算:
u(t) = Kp*e(t) + Ki*∫e(t)dt + Kd*e'(t)
其中,u(t)是控制器的输出,Kp、Ki和Kd分别是比例、积分和微分增益,e(t)=θ(t)-θd(t)是当前状态与目标状态之间的差异,e'(t)=θ'(t)-θd'(t)是当前状态与目标状态之间的差异的一阶导数。
在Matlab中,我们可以使用pid函数来设计PID控制器,并计算控制信号u(t)。
pid函数需要传递控制器增益Kp、Ki和Kd,以及参考信号θd(t)和θd'(t)作为输入。
我们可以根据设计需求来选择适当的控制器增益,并通过适当的设计参考信号来实现倒立摆保持垂直位置的控制。
最后,我们可以使用Matlab的sim命令来进行仿真。
sim命令可以加载初始状态、控制信号和仿真时间,并输出摆杆的角度和角速度的变化。
通过观察仿真结果,我们可以评估控制器的性能,并进行必要的调整和优化。
综上所述,我们可以使用Matlab来设计倒立摆控制系统的闭环控制器,通过数值仿真来评估控制器性能,并进行必要的调整和优化。
这个过程涉及到对倒立摆的建模、求解动力学方程、设计反馈控制器以及进行仿真分析等多个环节。
通过这些步骤,我们可以实现倒立摆的平衡控制,并应用于实际的工程应用中。