基于超螺旋二阶滑模的PMSM-DTC系统研究
永磁直线同步电机改进预测电流控制

摘 要:永磁直线同步电机( PMLSM) 预测电流控制( PCC) 时存在易受参数变化和延迟以及负载扰
动影响,为此提出基于二阶超螺旋滑模观测器( STSMO) 的改进型 PCC。 首先,建立包含不确定性
的 PMLSM 动态数学模型。 然后,为了补偿参数变化以及延迟的影响,采用二阶 STSMO 估计下一周
了解决参数变化问题,文献[9] 采用时延控制技术
性。 最后通过半实物仿真实验验证方法的有效性。
1 PMLSM 数学模型
PMLSM 的电压方程可以表示为:
dλ qo πvλ do
ü
+
+ ξq ; ï
ï
dt
τ
ý
dλ do πvλ qo
ï
vd = R o id +
+
+ ξ d 。 ïþ
dt
τ
vq = R o iq +
在建立 PMLSM 数学模型时,采用 i d = 0 方法简
化模型。 电磁推力 F e 表示为:
Fe = kf iq ;
k f = 3πp n λ f / 2τ。
其中: p n 为极对数; λ f 为永磁体磁链。
(4)
(5)
基于上述分析,将 PMLSM 机械运动方程写为
预测电流控制( predictive current control,PCC)
因其高带宽、高跟踪精确度、能够解除耦合关系等优
点而引起了广泛关注 [2 - 4] 。 采用 PCC 时,实际电流
可以在一个开关周期内精确跟踪给定电流。 因此,
PCC 非常适合应用于高性能的电机控制
[5]
。 然而,
延迟和参数变化 2 个问题会严重影响 PCC 的性能。
超螺旋算法滑模

超螺旋算法滑模超螺旋算法滑模,是一种基于滑模控制的新型算法。
相比于传统的滑模控制,其能够更加高效、稳定地实现需要控制的系统动态稳定性。
下面我们将详细介绍超螺旋算法滑模的原理、优点、应用以及未来发展方向。
超螺旋算法滑模的原理基于滑模控制,是一种非线性控制方法。
滑模控制是指通过某种方式将系统动态转化成为一种不变的模式,从而实现对系统状态的稳定控制。
在滑模控制中,系统的状态被定义为在滑模面上运动,通过对滑模面的选择和滑动模式的控制,可以精确地控制系统状态的变化。
超螺旋算法滑模则采用了超螺旋控制的思想,将传统滑模控制的滑动模式改为超螺旋运动模式,从而更加高效、稳定地调节系统状态。
在超螺旋控制中,控制器对目标状态和当前状态进行分析,并根据差异采用不同的控制方式。
当目标状态与当前状态差异较小时,控制器采用传统的滑动模式控制;当差异较大时,控制器通过调节超螺旋运动模式来提高控制精度。
超螺旋算法滑模的优点在于其高效、稳定、鲁棒性强等特点。
通过采用超螺旋运动模式,能够在动态切换控制模式时,不会发生系统状态的异常波动和不稳定性。
同时,控制器能够根据系统状态差异自动调节控制模式,使得系统在不同状态下能够保持稳定。
超螺旋算法滑模的应用范围广泛,主要应用在动态稳定控制领域,例如飞行器控制、机器人控制、工业控制等。
在飞行器控制中,超螺旋算法滑模能够有效地控制飞行器在不同环境下的稳定性,提高其飞行效率和精度。
在机器人控制中,超螺旋算法滑模则能够实现对机器人运动轨迹的高效稳定控制。
未来,超螺旋算法滑模将会继续发展,其主要发展方向在于在更多领域应用以及优化控制算法。
如在复杂工业控制中,超螺旋算法滑模需要进一步优化控制算法,以满足更高的控制要求。
同时,其也能够应用于自动驾驶系统领域,实现对汽车行驶和交通流量的高效控制。
总之,超螺旋算法滑模是一种高效、稳定的控制方法,其原理基于滑模控制和超螺旋控制思想。
其具有诸多优点和应用场景,未来也将会在更广泛的领域得到应用和发展。
基于两级滤波的改进滑模观测器PMSM_无速度传感器控制

统中转子位置和速 度 信 号 非 常 重 要,但 是 传 统 的 机
越来越不能满足系 统 准 确 性 的 要 求,所 以 无 位 置 传
感器控制开始出现
。
[
3
Hale Waihona Puke 7]噪声的线性传感器数据使线性随机系统的均方估计
误差最小化 [16],能过滤高频噪声但对 模 型 精 度 要 求
现伺服系统的精准快速控制。
基于以 上 讨 论,提 出 了 一 种 基 于 两 极 滤 波 的
级滤波器,得到 PMSM 转子更精确的位置估计信息。利用 Ma
t
l
ab,对使用了传统观测器的系统和
使用改进的观测器的系统分别进行了仿真,仿真结 果 表 明:与 使 用 了 传 统 观 测 器 的 PMSM 伺 服 系
统相比,使用了改进观测器的 PMSM 伺服系统转速误差更小、估算结果更准确。
关键词
滑模观测器;两级滤波;卡尔曼滤波器;无速度传感器控制;永磁同步电动机(
Uq =rsiq +λq +ωeλq
(
1)
Ud =rsid +λd +ωeλd
模变结构控制的优点,其结构原理如图 1 所示。
(
2)
(
3)
λq =Lqiq
λd =Ldid +Lmdidf
(
ωe =pnωr
4)
式中:
id 、
iq 分 别 为 定 子 电 流 d 、
q 轴 分 量;Ud 、
Uq 分别为定子电 压 d 、
文献[
9]从滑模控 制 率 出 发 提 出 非 奇 异 新 型 快 速 终
端滑模控制以提高 系 统 的 准 确 性,但 没 有 考 虑 外 部
基于改进分数阶滑模控制的 PMSM直接转矩控制

基于改进分数阶滑模控制的 PMSM直接转矩控制王敏;陈芬;李想;潘永春【摘要】基于滑模变结构的永磁同步电动机直接转矩控制技术,具有控制结构简单、响应速度快、鲁棒性强等优点,是一种高性能的变频调速控制方法。
为此,提出一种基于分数阶滑模变结构的永磁同步电动机直接转矩控制技术,采用组合趋近率设计分数阶滑模控制器,即在控制前期采用幂指数趋近率,控制后期采用变速趋近率。
仿真结果表明该控制方法能够有效减小磁链和转矩脉动,显著增加系统响应速度,抗扰动性能好,鲁棒性强。
%Direct torque control technology for permanent magnet synchronous motor (PMSM)based on sliding mode varia-ble structure is provided with merits of simple control structure,fast response speed,strong robustness,and so on,which means a kind of high-powered control method for frequency conversion.Therefore,this paper proposes a kind of PMSM di-rect torque control technology based on fractional order sliding mode variable structure which uses combination reaching law to design the fractional order sliding mode controller,that is to adopt power exponent reaching law in the preliminary of control while variable speed reaching law in the late stage.Simulation result indicates that this control method is able to ef-fectively reduce flux linkage and torque impulse and obviously improve response speed of the system,and has good disturb-ance performance and strong robustness.【期刊名称】《广东电力》【年(卷),期】2016(029)004【总页数】6页(P50-54,61)【关键词】分数阶滑模控制器;永磁同步电动机;组合趋近率;空间矢量脉宽调制【作者】王敏;陈芬;李想;潘永春【作者单位】河海大学能源与电气学院,江苏南京211100;河海大学能源与电气学院,江苏南京211100;河海大学能源与电气学院,江苏南京211100;河海大学能源与电气学院,江苏南京211100【正文语种】中文【中图分类】TM714随着现代控制理论的不断发展及永磁同步电动机(permanent magnet synchronous motor,PMSM)的普及应用,PMSM变频调速技术取得了实质性的突破[1-3],其中直接转矩控制(direct torque control,DTC)结构简单,性能优于传统的矢量控制,但DTC还存在磁链和转矩脉动、噪声大等缺点,近年也出现了多种改进控制方案[4-6],其中,滑模控制技术具有算法简单、响应速度快、鲁棒性强等优点而广泛应用于电动机[7]、机器人[8]、航空航天[9]等控制系统中。
PMSM DTC控制系统中定子磁链观测器的研究
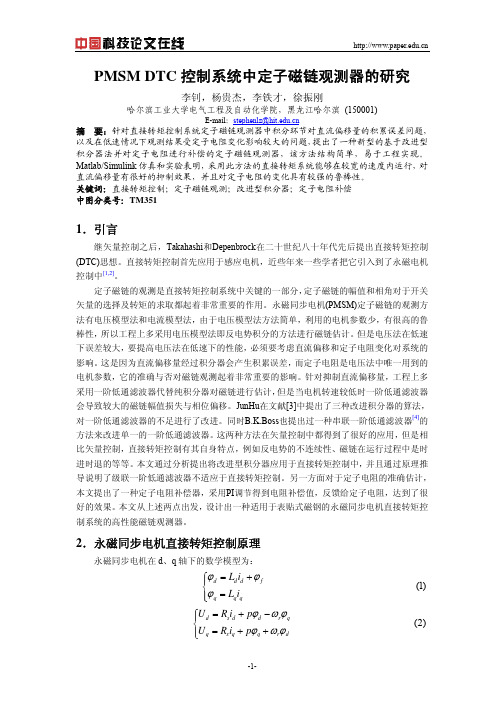
的磁链矢量ϕ 的值就会减小并向逆时针旋转,直到重新与反电势正交。当 γ 角小于 90°时分
析方法相似。因此自适应积分器可以自动调整补偿磁链的幅值来达到消除直流偏移量的目 的。
-3-
β emf α
γ
ϕ2 ϕ2'
γ
PMSM DTC 控制系统中定子磁链观测器的研究
李钊,杨贵杰,李铁才,徐振刚
哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨 (150001)
E-mail:stephenlz@
摘 要:针对直接转矩控制系统定子磁链观测器中积分环节对直流偏移量的积累误差问题, 以及在低速情况下观测结果受定子电阻变化影响较大的问题,提出了一种新型的基于改进型 积分器法并对定子电阻进行补偿的定子磁链观测器,该方法结构简单,易于工程实现。 Matlab/Simulink 仿真和实验表明,采用此方法的直接转矩系统能够在较宽的速度内运行,对 直流偏移量有很好的抑制效果,并且对定子电阻的变化具有较强的鲁棒性。 关键词:直接转矩控制;定子磁链观测;改进型积分器;定子电阻补偿 中图分类号:TM351
-2-
由于电机的机电时间常数远大于电磁时间常数,使得定子磁链瞬时转速变得比转子磁链 转速大,造成定转子磁链之间夹角瞬时增加,转矩迅速增大,反之亦然。这说明了磁链运行 状态是时进时退的,这样在磁链基波信号上必然会叠加上高频信号。另外,直接转矩控制中 反电势是通过定子绕组外加电压减去电阻压降求得的,定子绕组外加电压为六个电压矢量组 成的跳变信号,而电机中由于电感的作用电流为连续值,所以它们的差反电势为非连续的跳 变信号。
ϕ1
ϕ
ϕ'
基于代码生成的PMSM滑模控制

基于代码生成的PMSM滑模控制近年来,随着数字化技术的不断发展和应用,控制系统的工程设计逐渐向着自动化和智能化方向发展。
基于代码生成的控制系统设计方法成为了一种热门的研究方向。
本文将以基于代码生成的PMSM滑模控制为例,介绍这一控制系统设计方法的原理和应用。
基于代码生成的控制系统设计方法是一种将模型转换为代码的技术,应用于控制系统的工程设计。
相比传统的手工编写控制代码的方法,代码生成技术可以极大地提高开发效率和系统的可维护性。
在PMSM(永磁同步电机)控制领域,滑模控制是一种常用的控制策略,通过引入滑模面对系统进行控制。
基于代码生成的PMSM滑模控制方法,即通过将滑模控制算法转化为可执行的控制代码,实现对PMSM系统的精确控制。
1. 建立PMSM模型:需要建立起PMSM的数学模型。
PMSM的模型可以通过绕组电感、电流以及电机的转速等参数进行描述。
常用的PMSM模型包括dq坐标系模型和abc坐标系模型等。
2. 滑模面设计:在建立PMSM模型的基础上,需要设计合适的滑模面。
滑模面的设计可以根据控制系统的要求进行调整。
一般而言,滑模面应具备稳定性和收敛性,以实现PMSM的精确控制。
3. 控制代码生成:通过代码生成技术,将设计好的滑模控制算法转换为可执行的控制代码。
代码生成技术可以根据PMSM模型和滑模面的数学描述,自动生成相应的控制代码。
这一过程可以大大减少编写代码的时间和工作量。
4. 控制系统实现:将生成的控制代码应用于实际的控制系统中。
具体而言,需要将控制代码加载到嵌入式控制器或计算设备中,通过与PMSM系统的接口进行连接,实现对PMSM的滑模控制。
1. 提高开发效率:相比手工编写控制代码,代码生成技术可以极大地提高开发效率。
通过将模型转换为代码,可以避免了手工编写代码的过程,减少了繁琐的人工操作。
2. 提高系统可维护性:代码生成技术可以生成易于理解和修改的控制代码。
当系统需要进行修改或升级时,只需修改模型参数和滑模面设计,然后重新生成代码,而无需对已有的代码进行大规模的修改。
基于代码生成的PMSM滑模控制

基于代码生成的PMSM滑模控制关键词:永磁同步电机;滑模控制;代码生成;MATLAB/Simulink随着电力电子技术和计算机技术的不断发展,基于代码生成的控制设计方法逐渐成为研究和工程实践中的重要手段。
基于代码生成的控制方法可以将控制算法设计原型快速部署到实际控制器中,提高了控制系统的开发效率和可靠性。
本文以PMSM为研究对象,基于代码生成的方法对PMSM进行滑模控制器的设计和实现,通过MATLAB/Simulink对PMSM进行模拟仿真,验证了基于代码生成的PMSM滑模控制方法的有效性和可行性。
二、PMSM滑模控制原理滑模控制(SMC)是一种强鲁棒性的控制方法,其核心思想是通过引入滑模面来抑制外部扰动和不确定性对系统的影响,使得系统在滑模面上运动,从而实现对系统的稳定控制。
PMSM系统动态方程如下所示:\begin{array}{c}\frac{\text {d}}{\text {d} t} \overrightarrow{X}=f\left(\overrightarrow{X}, \overrightarrow{U}\right) \\\overrightarrow{Y}=g\left(\overrightarrow{X}, \overrightarrow{U}\right)\end{array}\overrightarrow{X}为系统状态变量,\overrightarrow{U}为系统输入变量,\overrightarrow{Y}为系统输出变量,f和g分别为系统的状态方程和输出方程。
PMSM的滑模控制器设计步骤如下:1. 设计滑模面:为PMSM系统设计一个包含状态变量和控制变量的滑模面,使得系统在滑模面上的动态行为具有较好的特性;2. 设计滑模控制律:基于滑模面设计PMSM的滑模控制律,使得系统的状态变量在滑模面上收敛到零;3. 确定控制器参数:根据系统的参数和性能要求,确定滑模控制器的参数。
基于SVPWM的模糊滑模DTC系统研究
基 金项 目 :辽 宁 省创 新 团 队 项 目 ( 0 8 0 8 2 0T 7 ) 作 者简 介 :任 志玲 ( 9 1 ) 女 , 宁 籍 , 教 授 , 攻 节 能型 电力 电子 技术 及应 用 ; 17 - , 辽 副 主 肖 锐 ( 9 2 ) 男 , 北 籍 , 究 生 , 攻 电力 电子 及 电力 转 动 方 面 的研 究 。 18一 , 湖 研 主
畸变的 问题 ; 有文 章 [ , ] 还 4 5 针对 磁链 观 测 问题 给 出 了不 同磁 链观 测器 的 改进 方 案 : 通 滤 波器 和 高 低 通 滤波器结 合 的磁链 观测 器和基 于转子位 置 的定 子
磁链 观测器 。
量控制 变频调速技 术之后 发展起来 的又一种 高性能
就是有 差控制 , 以电机转矩存 在脉动 , 响系统性 所 影
能。
1 异 步 电机 的数 学 模 型
作为异 步电机控 制 系统研究 和分析基 础 的数 学 模型 , 直接转矩 采用 的是 两相静 止 坐标 系 (
学描述 如下 :
状态方程 :
R。 + R L L。
‘a e
变流变 频调速技 术。直接转 矩控制 理论 的出现在很
本 文针对 直接 转矩 系 统 转矩 脉 动 问题 , 出一 提 种结合 模糊 滑模 控制 和空 间矢 量脉 宽调制技 术 的异
步 电机 直接转矩 控 制 系统 , 现代 控 制理 论 引人 直 将 接转矩 控制 系统 , 实验证 明改进 后 的 D C系统能 有 T 效减少 系统运行 中的转 矩 和磁链 脉 动 , 效提 升 系 有 统性能 。
第3 0卷 第 2期 21 0 1年 4月
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于超螺旋二阶滑模的PMSM-DTC系统研究张苏英;马贺明;墨昭瑾;李林静;刘慧贤【摘要】针对传统永磁同步电机直接转矩控制系统(PMSM-DTC)易受参数变化影响及转矩脉动大的问题,提出在系统中采用空间电压矢量调制技术(SVPWM)代替传统的正弦脉宽调制(SPWM),引入控制率为超螺旋算法的二阶滑模变结构,以定子磁链和转矩作为被控对象设计控制器代替传统系统中的PI控制器.仿真结果表明,该策略不仅有效消除了一阶滑模存在的抖振问题,明显减小了系统中定子磁链和转矩脉动,且具有较强的速度跟踪能力,对负载扰动和参数变化等不确定性具有很强的鲁棒性,因此可以很好地应用在电机控制方面.%Aiming at the problems that the conventional permanent magnet synchronous motor direct torque control system (PMSM-DTC) is susceptible to the influence of parameter change and torque ripple,it is proposed that the space voltage vector modulation technique (SVPWM) is used instead of the traditional sinusoidal pulse width modulation (SPWM),on the basis of which the second-order sliding mode variable structure control rate with super-twising algorithm is introduced,with the stator flux linkage and torque as the controlled object to design the controller instead of traditional PI controller in the system.The simulation results show that the strategy not only eliminates effectively the first-order sliding mode chattering problems,significantly reducing the stator flux linkage and torque ripple,but also has strong ability of speed tracking,with robustness to load disturbance,and parameter changes,etc.,therefore can be well applied in motor control.【期刊名称】《河北科技大学学报》【年(卷),期】2017(038)002【总页数】7页(P176-182)【关键词】鲁棒控制;永磁同步电动机;二阶滑模;超螺旋算法;转矩脉动;鲁棒性【作者】张苏英;马贺明;墨昭瑾;李林静;刘慧贤【作者单位】河北科技大学电气工程学院,河北石家庄 050018;河北科技大学电气工程学院,河北石家庄 050018;河北科技大学电气工程学院,河北石家庄 050018;河北科技大学电气工程学院,河北石家庄 050018;河北科技大学电气工程学院,河北石家庄 050018【正文语种】中文【中图分类】TP27;TP351永磁同步电动机具有效率高、功率密度大、动态响应快、鲁棒性强、结构简单等优点,在伺服系统中被广泛应用。
然而,永磁同步电动机是一个多变量非线性的被控对象,其转速和定子电流之间存在耦合,加之负载的变化等外部扰动的影响,使高性能电动机的控制成为难题[1]。
直接转矩控制(DTC)是继矢量控制之后出现的一种交流电动机调速控制方案,直接转矩控制与矢量控制不同,它是直接将定子磁链和转矩作为控制变量,无需进行磁场定向、矢量变换和电流控制,具有结构简单、动态响应好等优点[2]。
但DTC控制存在转矩和磁链脉动较大,损耗增加等问题[3]。
虽然通过增加零矢量可以抑制脉动,但是由于可供选择的电压矢量有限,导致无法从根本上消除脉动[4]。
文献[5—8]引进电压空间矢量调制(space vector pulse width modulation,SVPWM)方案,其基本思想是,在一个周期内安排多个空间矢量合成所需电压空间矢量。
与传统的正弦脉宽调制(space vector pulse width modulation,SPWM)技术相比,SVPWM具有开关损耗小、直流电压利用率高等优点,对转矩和磁链的控制更准确,在一定程度上解决了因电压矢量有限导致的脉动问题[9]。
滑模控制(sliding mode control, SMC)是一种有效的鲁棒控制方法,本质上是一类特殊的非线性控制[10-14]。
这种控制策略可以根据系统当前的状态有目的地进行切换,迫使系统按照预定“滑动模态”的状态轨迹运动。
由于滑动模态的设计与对象参数及扰动无直接关系,使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、物理实现简单等优点[15]。
但是,SMC本身存在的抖动及开关频率高等问题限制了它在电力驱动系统中的应用。
采用高阶SMC将产生抖振的离散控制律作用在滑模变量的r阶导数上,使非空滑模集S在有限时间内收敛(其中=…=s(r-1)=0}),可以有效消除传统滑模控制的抖振现象[15-17]。
本文采用高阶SMC与电压空间矢量调制(SVPWM)相结合,将传统的DTC改进为超螺旋二阶滑模控制(STSM-DTC),目的在于在获得快速转矩动态响应的同时减小转矩脉动,提高DTC对参数变化的鲁棒性。
不失一般性,考虑单输入非线性系统:式中,x∈χ⊂Rn为状态变量,|xi|≤ximax,1≤i≤n;u∈U为控制输入,|u|≤umax;σ(t,x)为输出函数,称为滑模变量,a(t,x)、b(t,x)是光滑的不确定函数。
控制目标是使系统在有限的时间内到达滑模面σ(t,x)=0,并具有二阶滑模动态[18]。
对滑模变量进行连续求导,可得:式中:(t,x)和g(t,x)为不确定函数。
存在正数C,Km,KM,使得∀u∈U且∀x∈χ,有:假设式(3)在全局范围内均成立,则式(2)和式(3)意味着微分包含:大多数二阶滑模可以看成是微分包含式(4)在有限时间内使得等于0的控制器。
因为式(4)并不“记忆”初始系统(1),因此这种控制器对于任何扰动都有很强的鲁棒性。
因此,问题转化为寻找一个反馈:使得式(4)和式(5)的所有运动轨迹在有限时间内收敛于相平面的原点状态=0。
在二阶滑模控制律设计中,存在一种不需要滑模变量导数符号的算法,它能使系统运动轨迹在有限时间内围绕原点螺旋式地收敛到原点,因此被称为超螺旋算法[19-21]。
超螺旋控制算法的控制律设计如式(6)所示:式中,KP和KI为正增益,取值范围由式(7)来确定。
若系统(1)满足式(3),且式(6)满足式(7)条件,可使STSM控制结构在有限时间内收敛。
三相永磁同步电动机数学模型为式中:ψs=ψsd+jψsq为定子磁链,is=id+jiq为定子电流,Rs为定子电阻,us=usd+jusq为定子电压,ω为转子速度,J为转动惯量,B为摩擦系数,TL为负载转矩,ψf为永磁体磁链,Ls=Ld=Lq,Te为电磁转矩,p为电动机极对数。
根据定子磁链矢量参考系可知,ψs=ψsd,磁链幅值连续求导得:式中,Rs,Ls,id,p,ω均为有限的数值,因此式(9)满足式(3)。
STSM磁链控制器设计如下:式中,满足式(7)的条件。
同样对电磁转矩进行连续求导,可得:分析方法如定子磁链,KP,KI的范围同样需要稳定条件(7)来确定。
STSM转矩控制器设计如式(13)和式(14)所示:式中,转矩误差满足式(7)的条件。
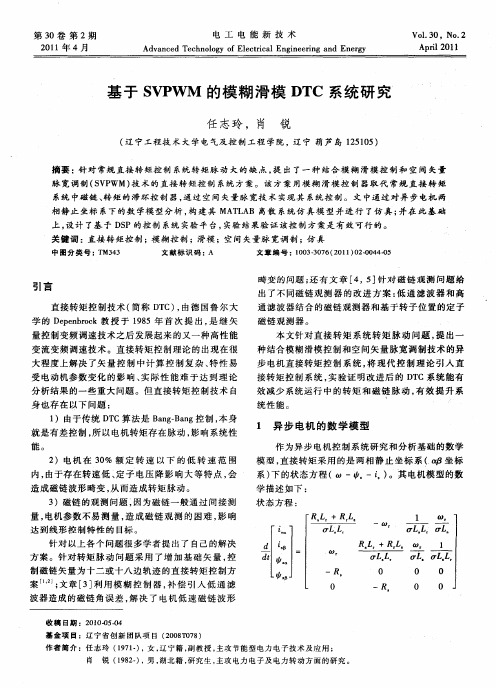
根据式(10)、式(11)和式(13)、式(14),STSM控制器设计框图如图1所示。
STSM-DTC系统框图如图2所示。
与传统DTC系统相比,STSM-DTC系统用STSM模块代替了PI控制器模块。
在实际控制过程中,将测得电动机的三相电压和电流进行坐标变换后计算出定子磁链s和电磁转矩e,分别与给定值和相比较,差值通过STSM产生控制SVPWM的输入电压,进而驱动电动机。
为进一步研究STSM-DTC系统的运行性能,将传统的DTC与STSM-DTC 进行仿真比较研究,采用相同的采样时间和仿真步长,分别给定转速nN=100 r/min和nN=600 r/min进行实验。
实验电动机主要参数为负载转矩Te=1 N·m,定子磁链给定值,仿真结果如图3—图6所示。
当低速运行nN=100 r/min时,传统DTC和STSM-DTC转矩响应曲线如图3所示。
为了使结果更为清晰,对曲线做了局部放大处理,如图3右上角所示。
在图4—图6中也作了相应处理。
由图3可知,传统DTC转矩响应幅值在0.5~1.5 N·m之间波动,而STSM-DTC 转矩响应幅值在0.8~1.2 N·m之间波动,转矩脉动明显减小。
当低速运行nN=100 r/min时,传统DTC和STSM-DTC的定子磁链响应如图4所示。
图4定子磁链响应曲线分析情况与图3相同。
传统DTC磁链响应曲线幅值在0.294~0.304 Wb之间,且波动频率高;而STSM-DTC响应曲线幅值为0.295~0.301 Wb,且波动频率明显减小。
因此,本文改进方法在电动机低速运行情况下对减小脉动有效,并且获得了良好的动态和静态性能。
当电动机高速运行nN=600 r/min时,传统DTC和STSM-DTC转矩响应曲线如图5所示。
由图5可以看出,当电动机高速运行时,传统DTC转矩响应幅值在0.5~1.5 N·m 之间波动,而STSM-DTC转矩响应幅值在0.9~1.1 N·m之间波动,转矩脉动明显减小。
整体仿真过程表明,STSM-DTC系统动态性能更好。
当高速运行nN=600 r/min时,传统DTC和STSM-DTC的定子磁链响应曲线如图6所示。
图6定子磁链响应结果分析与图5相同。
传统DTC磁链响应曲线幅值在0.295~0.305 Wb之间,且波动频率高;而STSM-DTC响应曲线幅值为0.295~0.302 Wb,且波动频率明显减小。
因此,本文改进方法在电动机高速运行时对减小脉动同样有效。
综合图3—图6可见,无论是高速运行还是低速运行,与传统DTC比较,STSM-DTC系统不仅转矩和磁链脉动均有明显减小,而且动态性能有所提升。