农业机械自动化控制系统的设计与实现
农业机械智能化作业的智慧农场解决方案

农业机械智能化作业的智慧农场解决方案第一章:引言 (2)1.1 项目背景 (2)1.2 目标意义 (2)1.3 技术路线 (2)第二章:智慧农场基础设施建设 (3)2.1 农业物联网建设 (3)2.2 农业大数据平台搭建 (3)2.3 农业信息化终端设备配置 (4)第三章:农业机械智能化技术研究 (4)3.1 智能感知技术 (4)3.1.1 传感器技术 (4)3.1.2 视觉识别技术 (5)3.1.3 数据处理与分析 (5)3.2 智能决策技术 (5)3.2.1 决策算法 (5)3.2.2 模型构建 (5)3.2.3 系统集成 (5)3.3 智能控制技术 (5)3.3.1 执行器技术 (5)3.3.2 控制算法 (6)3.3.3 通信技术 (6)3.3.4 系统集成与优化 (6)第四章:农业机械智能化作业系统设计 (6)4.1 系统架构设计 (6)4.2 功能模块划分 (6)4.3 系统集成与优化 (7)第五章:智能播种系统 (7)5.1 播种机智能化改造 (7)5.2 播种参数智能调控 (7)5.3 播种作业智能监控 (8)第六章:智能施肥系统 (8)6.1 施肥机智能化改造 (8)6.2 施肥参数智能调控 (8)6.3 施肥作业智能监控 (9)第七章:智能灌溉系统 (9)7.1 灌溉设备智能化改造 (9)7.2 灌溉参数智能调控 (10)7.3 灌溉作业智能监控 (10)第八章:智能收割系统 (10)8.1 收割机智能化改造 (10)8.2 收割参数智能调控 (11)8.3 收割作业智能监控 (11)第九章:智慧农场运维与管理 (12)9.1 农业机械维护保养 (12)9.2 农业生产数据管理 (12)9.3 农业机械智能调度 (13)第十章:智慧农场发展前景与政策建议 (13)10.1 发展前景分析 (13)10.2 政策法规建议 (14)10.3 产业协同发展 (14)第一章:引言1.1 项目背景我国农业现代化进程的加快,农业机械化水平不断提高,智能化农业成为农业发展的重要方向。
《2024年智能移动式水果采摘机器人系统的研究》范文
《智能移动式水果采摘机器人系统的研究》篇一一、引言随着现代农业的不断发展,智能化农业机械技术已经成为了研究热点之一。
作为现代农业生产中的重要环节,水果采摘一直依赖大量人工完成,这既耗费了大量的人力资源,又容易因天气、时间等因素影响采摘效率。
因此,开发一种高效、智能的移动式水果采摘机器人系统,成为了现代农业技术发展的迫切需求。
本文旨在研究智能移动式水果采摘机器人系统的设计原理、实现方法以及应用前景。
二、系统设计原理智能移动式水果采摘机器人系统主要由移动平台、视觉识别系统、机械臂和控制系统等部分组成。
其中,移动平台负责在果园中自主导航和移动,视觉识别系统用于识别和定位水果,机械臂则负责完成采摘动作,控制系统则负责整个系统的协调和控制。
(一)移动平台移动平台是整个系统的核心,其自主导航和移动能力是系统运行的基础。
移动平台采用轮式驱动方式,能够在复杂地形上自主行驶。
同时,移动平台配备了GPS定位系统和传感器,能够实现精确的定位和避障功能。
(二)视觉识别系统视觉识别系统是智能移动式水果采摘机器人系统的关键部分,其性能直接影响到采摘效率和准确度。
视觉识别系统采用机器视觉技术,通过图像处理和计算机视觉算法,实现对水果的自动识别和定位。
该系统能够快速准确地识别出不同种类、不同位置的水果,为机械臂的采摘动作提供准确的定位信息。
(三)机械臂机械臂是完成采摘动作的关键部分。
根据水果的特性和生长环境,机械臂采用柔性材料制成,能够适应不同形状和大小的水果。
同时,机械臂配备了力传感器和运动控制器,能够实现对水果的精准采摘和放置。
(四)控制系统控制系统是整个系统的“大脑”,负责协调和控制各个部分的运行。
控制系统采用先进的计算机技术和控制算法,能够实现自主控制、远程控制和手动控制等多种控制方式。
同时,控制系统还能够实时监测系统的运行状态和性能参数,为系统的维护和管理提供支持。
三、实现方法智能移动式水果采摘机器人系统的实现需要综合运用机械设计、电子技术、计算机技术等多个学科的知识和技术。
基于PLC技术的自动化灌溉施肥系统的设计
农 机 化 研 究
第 9期
基 于 P C 技 术 的 自 动 化 灌 溉 施 肥 系 统 的 设 计 L
李 伟
( 南机 电高 等专 科 学 校 机 电工程 系 ,河 南 新 乡 河 摘 430 ) 5 0 2
要 : 随 着 我 国农 业 科 技 的 发展 , 灌 施 肥 智 能 化 控 制 技 术 越 来 越 引 起 人 们 的关 注 , 为 未 来 优 质 高 效 设 施 滴 成
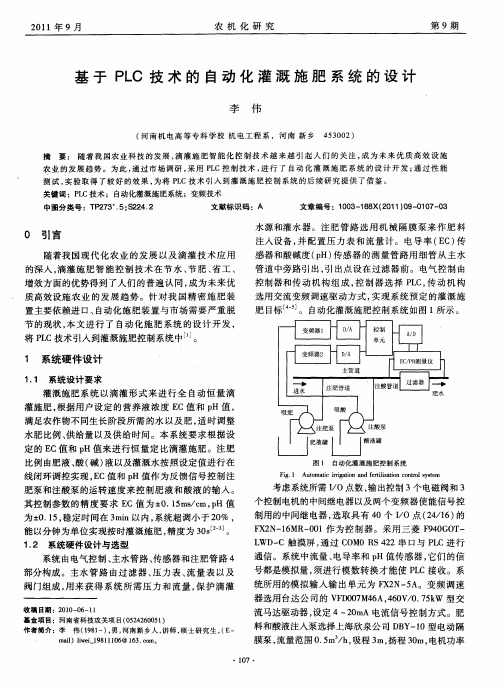
部分构成。主水 管路 由过滤器 、 压力 表、 流量表 以及
阀门组成 , 用来获得 系统所 需压力 和流量 , 保护滴 灌
收 稿 日期 :2 1 — 6 1 00 0 — 1 基 金项 目:河 南省科技攻 关项 目( 5 4 6 0 1 0 2205 )
作 者简介 :李
伟 (91 ) 男 , 1 8 一 , 河南 新 乡人 , 师 , 讲 硕士 研究 生 , E ( —
关键词 :P C技术 ;自动化灌溉施肥 系统 ;变频 技术 L
中图分 类号 :T 2 3 . ; 2 4 2 P 7 5 ¥ 2 . 文献标识码 :A 文章编号 :1 0 - 8 X( 0 1 0 - 1 7 0 0 3 1 8 2 1 )9 0 0 - 3
0 引言
随着我 国现代化农 业 的发展 以及 滴灌技术 应用 的深入 , 滴灌 施肥智 能控制技 术在节水 、 节肥 、 工 、 省 增效方面的优势得到了人们 的普遍认 同 , 成为未来优
农 业 的 发展 趋 势 。为此 , 过 市 场 调 研 , 用 P C控 制技 术 , 行 了 自动 化 灌 溉 施 肥 系统 的设 计 开 发 ; 过 性 能 通 采 L 进 通
测 试 , 验 取 得 了较 好 的 效果 , 实 为将 P C技术 引入 到 灌 溉 施肥 控 制 系 统 的后 续 研 究 提 供 了借 鉴 。 L
农业机械装备智能化升级改造实施方案

农业机械装备智能化升级改造实施方案第一章总体战略规划 (2)1.1 智能化升级改造背景 (2)1.2 智能化升级改造目标 (3)1.3 智能化升级改造原则 (3)第二章技术路线与标准 (3)2.1 技术路线规划 (3)2.2 技术标准制定 (4)2.3 技术评估与验证 (4)第三章传感器与控制系统 (5)3.1 传感器选型与应用 (5)3.1.1 传感器选型原则 (5)3.1.2 传感器选型与应用实例 (5)3.2 控制系统设计 (5)3.2.1 控制系统设计原则 (5)3.2.2 控制系统设计内容 (6)3.3 通信网络构建 (6)3.3.1 通信网络设计原则 (6)3.3.2 通信网络构建内容 (6)第四章机器视觉与导航系统 (6)4.1 机器视觉技术选型 (6)4.1.1 摄像头选型 (7)4.1.2 图像处理算法选型 (7)4.1.3 深度学习框架选型 (7)4.2 导航系统设计 (7)4.2.1 导航传感器选型 (7)4.2.2 导航算法设计 (7)4.3 集成与测试 (7)4.3.1 系统集成 (8)4.3.2 功能测试 (8)4.3.3 功能优化 (8)第五章智能决策与优化算法 (8)5.1 决策模型构建 (8)5.2 优化算法研究 (9)5.3 算法验证与应用 (9)第六章作业监控系统 (9)6.1 作业数据采集 (9)6.1.1 数据采集目标 (9)6.1.2 数据采集方法 (10)6.1.3 数据采集系统构成 (10)6.2 数据处理与分析 (10)6.2.1 数据预处理 (10)6.2.2 数据分析方法 (10)6.2.3 数据处理与分析系统构成 (10)6.3 监控预警系统设计 (10)6.3.1 预警指标体系构建 (10)6.3.2 预警规则制定 (10)6.3.3 预警系统实现 (11)6.3.4 预警系统优化 (11)第七章安全保障与故障诊断 (11)7.1 安全防护措施 (11)7.2 故障诊断技术 (12)7.3 预防性维护策略 (12)第八章产业化与应用推广 (12)8.1 产业化进程规划 (13)8.1.1 总体目标 (13)8.1.2 产业化阶段划分 (13)8.1.3 产业化进程关键任务 (13)8.2 应用场景拓展 (13)8.2.1 农业生产领域 (13)8.2.2 农业废弃物处理领域 (13)8.2.3 农业服务领域 (14)8.3 推广策略与实施 (14)8.3.1 政策引导 (14)8.3.2 技术培训与推广 (14)8.3.3 市场拓展 (14)8.3.4 资金保障 (14)第九章政策与法规支持 (14)9.1 政策环境分析 (14)9.2 法规体系建设 (15)9.3 政策扶持措施 (15)第十章项目管理与评估 (16)10.1 项目管理流程 (16)10.2 风险评估与控制 (16)10.3 项目效益评估与优化 (16)第一章总体战略规划1.1 智能化升级改造背景我国农业现代化进程的推进,农业机械装备在农业生产中发挥着日益重要的作用。
基于PLC的粮食烘干机系统设计与实现论文
沈阳理工大学应用技术学院题目:基于PLC的粮食烘干机系统设计与实现院系:专业:班级学号:学生姓名:指导教师:成绩:年月日摘要目前,粮食烘干技术在粮食的储存过程中起着至关重要的作用。
由于人工晾晒存在各种人为因素和天气因素的限制,且存在效率低下,烘干效果不达标等问题。
因此,本文介绍了一种基于PLC控制技术,以欧姆龙CPM2A可编程控制器为控制核心,对粮食烘干机的自动控制,即进粮、循环烘干、自动调温、合格粮食出粮的自动控制。
实现粮食的全过程自动烘干。
本文主要有硬件设计部分,软件设计部分,主程序模块,燃烧炉模块等几部分组成。
软件设计在CX-P编程软件上以梯形图编写,主要通过步进控制指令来完成对粮食烘干机各个子过程的控制。
并通过组态王软件模拟了粮食烘干机的自动控制过程。
关键词:PLC;粮食烘干机;自动控制AbstractAt present,grain drying technology plays a vital role in the food storage process. Presence of a variety of human factors and weather factors limit due to the artificial drying, and there is the problem of inefficiency, the drying effect of non-compliance.Therefore, this article describes a PLC-based control technology, Omron CPM2A Programmable controller to control the core grain dryer automatic control, that is, into the grain circulation drying thermostat qualified food Payroll automaticallycontrol. The whole process of achieving food drying.In this paper, a few parts of the hardware design, software design, the main program module, and the burner module.The software is designed to ladder programming software CX-P prepared, mainly through the stepper control instructions to complete control of the various sub-processes of the grain dryer. Kingview software simulation, automatic control of grain drying process.Key words: PLC;grain dryer;automatically control目录绪论 01 系统的主要硬件选择 (1)1.1 控制系统选择 (1)1.1.1 欧姆龙PLC的介绍 (1)1.1.2 PLC的产生与发展 (1)1.1.3 PLC的特点 (2)1.2 粮食烘干机的选择 (3)1.2.1 概述 (3)1.2.2 粮食烘干技术 (4)1.2.3 粮食烘干机的组成 (5)2 自动控制系统设计 (7)2.1 粮食烘干工艺流程 (7)2.2 系统硬件设备 (7)2.2.1 PLC的基本组成 (7)2.2.2 系统机型的选择与配置 (9)2.2.3 定义号的分配 (9)2.3 系统的软件设计 (10)2.3.1 程序框图 (10)2.3.2 梯形图设计 (12)2.3.3 部分语句说明 (14)2 系统的组态模拟 (17)3.1 模拟软件 (17)3.1.1 组态王软件介绍 (17)3.1.2 组态王软件特点 (17)3.1.3 组态王软件的命令语言 (18)3.2 利用组态王软件模拟系统 (18)3.2.1 粮食烘干机过程模拟 (18)3.2.2 燃烧室供油控制过程模拟 (25)结论 (26)致谢 .......................................................................... 错误!未定义书签。
园艺技术专业毕业设计论文:设计一种智能化的园艺机器人以自动完成种植和收获任务
园艺技术专业毕业设计论文:设计一种智能化的园艺机器人以自动完成种植和收获任务毕业设计论文标题:设计一种智能化的园艺机器人以自动完成种植和收获任务I. 研究背景随着科技的不断发展,自动化和智能化已经成为现代农业发展的重要方向。
园艺业作为农业的重要组成部分,其生产过程的自动化和智能化水平直接影响到生产效率和产品质量。
因此,设计一种能够自动完成种植和收获任务的智能园艺机器人具有重要意义。
II. 研究意义设计智能化的园艺机器人的意义主要体现在以下几个方面:1. 提高生产效率:自动化和智能化的生产方式可以大大提高园艺生产过程中的各个环节的效率和准确性,减少人力成本和劳动强度。
2. 保证产品质量:通过机器人精确的操作和控制,可以保证园艺产品的质量和一致性,减少人为因素对产品质量的影响。
3. 适应复杂环境:园艺生产过程中常常涉及到复杂的环境,如山地、丘陵、城市等,智能化的园艺机器人可以适应这些复杂环境,提高园艺生产的适应性和灵活性。
4. 推动农业现代化:设计智能化的园艺机器人可以为农业现代化提供技术支持和推动力,促进农业生产的机械化和智能化发展。
III. 研究目的本研究的主要目的是设计一种能够自动完成种植和收获任务的智能园艺机器人,实现以下目标:1. 自动识别和定位植物:通过图像识别和定位技术,机器人能够自动识别和定位植物的位置,以提高种植和收获的准确性和效率。
2. 精确操作和控制:通过机器学习和人工智能技术,机器人能够实现精确的操作和控制,以保证产品的质量和一致性。
3. 自主决策和路径规划:通过机器学习和自主决策技术,机器人能够根据环境和植物的状态自主决策和规划路径,以提高机器人的适应性和灵活性。
IV. 研究方法本研究将采用以下方法:1. 文献调研:对已有的园艺机器人进行文献调研和分析,了解其优点和不足,为新机器人的设计提供参考。
2. 总体设计:根据研究目的和需求,进行智能园艺机器人的总体设计和系统架构。
3. 硬件开发:根据总体设计,进行机器人的硬件系统开发和实现,包括机械结构、传感器、控制器、执行器等。
智能农业控制系统

自动化:减少人工操作,提高生产效率 高效:快速响应,精准控制,提高产量和质量 灵活:可针对不同场景进行定制和扩展 节能:采用低功耗硬件,减少能源消耗 稳定:采用可靠的硬件和软件,保证系统的稳定运行
温室大棚环境监测与调控 农田节水灌溉监测与控制 畜禽舍环境监测与通风控制 水产养殖环境监测与调控 农业物联网平台应用
化体系。
智能化:实现更加精准、高效 的农业生产
自动化:提高农业生产效率和 质量
绿色环保:降低农业对环境的 影响
互联网+:实现农业与互联网 的深度融合
感谢您的观看
汇报人:
化农业提供基础数据。
单击添加标题
类型:温度、湿度、光照、 二氧化碳浓度等多种类型的
传感器。
单击添加标题
应用:在智能农业控制系统 中,传感器技术是实现智能 化监测和精细化管理的重要
手段。
简介:智能农业控制系统中的通信技术是实现远程监控和数据传输的关键。 类型:无线通信和有线通信。 无线通信:包括ZigBee、WiFi、蓝牙等,具有灵活性和便捷性。 有线通信:包括RS485、CAN总线等,具有稳定性和长距离传输能力。
实时监测:系统可以实时监测土壤湿度和养分状况,及时调整灌溉和施肥的数量,确保作物生 长的最佳条件。
优化资源利用:通过智能农业控制系统的优化算法,可以最大限度地提高灌溉和施肥的效率, 减少浪费和污染。
提高产量和质量:通过精确控制灌溉和施肥的数量,可以更好地满足作物的生长需求,提高产 量和质量。
智能农业控制系统通过精准施肥、灌溉和病虫害防治等技术手段,提高农作物的产量和品质。
自动化技术:通过自动化设备的应用,提高农业生产效率,减少人力成本。
信息化技术:利用信息化技术,实现农业数据的采集、分析和利用,提高农业生产的精准度和 效率。
谷物烘干机的PLC控制设计论文

谷物烘干机的PLC控制设计学生姓名: xxxx学生学号:************院(系):机电工程学院年级专业:2007级机械设计制造及其自动化1班指导教师:xxx 副教授二〇一一年五月二十日摘要谷物烘干机是一种自动化程度要求较高的机电设备,应用于农业生产中的农作物烘干领域在工业控制领域,随着电力电子技术、可编程序控制器与变频技术的发展,以PLC控制为核心的电控技术在各类机械设备中的应用越来越广,它将逐渐取代传统的继电器控制系统,上升为交流电气控制的主流。
PLC作为谷物烘干机的核心控制器,其在工业过程控制中体现了强大功能。
当前,PLC在国际市场上已成为最受欢迎的的工业控制畅销产品。
本篇论文论述可编程控制器PLC对谷物烘干机自动控制:主要介绍谷物烘干机工艺流程,PLC控制系统的设计、梯形图、程序编制等。
关键词:PLC、谷物烘干机、自动控制ABSTRACTGrain drying machine is a high degree of automation required electromechanical equipment used in agricultural production, crops drying in the field of industrial control field, with the power electronics, programmable logic controller and variable frequency technology, the PLC Control as the core of the electronic control devices in various types of machinery used more and more widely, it will gradually replace traditional relay control system, electrical control of the exchange rose to the mainstream. PLC as the core of grain dryer controllers in industrial process control reflects the power. At present, PLC in the international market has become the most popular selling products for industrial control. This paper discusses the programmable logic controller PLC automatic control of grain dryers: grain dryer process introduced, PLC control system design, ladder, programming and so on.KEY WORDS: PLC, grain drying machine, automatic control目录摘要 (I)ABSTRACT............................................................................................................................................................ I I 1 绪论 .. (1)1.1本课题的研究意义 (1)1.2课题国内外研究现状 (1)1.3课题发展趋势 (2)2 PLC概述及基本原理 (4)2.1PLC西门子系统的介绍 (4)2.2PLC的应用 (4)2.3PLC的特点及工作原理 (5)3 谷物烘干机 (8)3.1概述 (8)3.2国内外先进谷物干燥技术 (8)3.3干燥技术种类 (9)3.4谷物干燥机的设备与组成 (10)3.4.1循环式干燥机构造特点 (11)3.4.2谷物烘干机工作原理 (11)3.5谷物烘干机的控制要求 (12)4 硬件设计 (14)4.1PLC与CPU型号的选择 (14)4.2系统机型选择与配置 (17)4.3主要参数计算 (19)4.4电源模块 (20)4.5底板或机架 (20)4.6PLC系统的其它设备 (20)4.7PLC的通信联网 (20)5 自动控制系统设计 (22)5.1谷物烘干工艺流程 (22)5.2系统软件设计 (23)5.2.1流程图 (23)5.2.2系统梯形图设计 (24)5.2.3系统STL语句 (27)5.2.4梯形图与程序整理 (29)总结 (31)参考文献 (32)致谢 (33)1 绪论1.1 本课题的研究意义谷物收割后含水很高,要想让谷物达到安全仓储的条件(不霉变)必须把谷物的含水率降低到能够进行仓储的安全水分(即12%为水稻仓储的安全水分)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
农业机械自动化控制系统的设计与实现
随着科技的不断发展,农业生产也在不断迈向现代化和自动化。
农业机械自动化控制系统的设计与实现成为提高农业生产效率和质量的重要手段。
本文将介绍农业机械自动化控制系统的设计与实现的背景、原理及具体实施步骤。
一、背景
农业机械自动化控制系统的设计与实现是为了解决传统农业生产中的劳动力不足、生产效率低下等问题。
传统农业生产依赖人力驱动,工作强度大且效率低下。
而农业机械自动化控制系统的设计与实现可以实现农业生产过程的自动化,提高生产效率、降低劳动强度,同时减少资源浪费,为农业可持续发展提供支持。
二、原理
农业机械自动化控制系统的设计与实现依赖于现代电子技术、自动控制技术和传感器技术等多种技术手段的应用。
其原理主要包括以下几个关键环节:
1. 传感器技术:通过各种传感器获取农田中土壤水分、温度、光照等相关参数的数据,并将其转化为电信号输入到控制系统中。
2. 控制系统:根据传感器采集到的数据,控制系统能够实时计算和分析作物的生长情况,并控制农业机械的运转状态,以达到最佳的生产效果。
3. 自动控制技术:利用自动控制技术,通过对农业机械进行编程和控制,实现自动化操作。
例如,可以根据作物生长情况自动调节灌溉水量和灌溉时间,或者自动调节农机的工作速度等。
三、实施步骤
农业机械自动化控制系统的设计与实施需要经过以下几个步骤:
1. 系统需求分析:分析现有农业生产过程中存在的问题和需求,确定农业机械自动化控制系统的功能目标和性能指标。
2. 系统设计:根据需求分析的结果,设计农业机械自动化控制系统的硬件和软件结构。
硬件部分包括传感器、执行元件和控制器等设备的选型和布置,软件部分包括控制算法和人机界面等。
3. 系统实施和调试:根据设计方案,对农业机械自动化控制系统进行实施和调试。
这一步涉及到硬件的安装和连线以及软件的编程和调试等工作。
4. 系统运行和维护:在系统实施和调试完成后,进行系统运行和维护。
系统运行时需要对数据进行采集和分析,并根据分析结果进行相应的控制操作。
同时,定期进行系统的维护和检修,以保证系统的正常运行。
四、案例分析
以农田灌溉自动化控制系统为例,对农业机械自动化控制系统的设计与实施进行具体说明。
1. 系统需求分析:分析农田灌溉过程中的问题,例如因人为疏忽或误判而造成的过度或不足灌溉等。
确定系统的功能目标,例如实现精确的灌溉控制,并指定性能指标,例如灌溉水量的误差要求等。
2. 系统设计:选取合适的土壤水分传感器和执行元件,并设计控制器的硬件结构。
在软件方面,根据传感器采集到的土壤水分数据,通过控制算法计算出灌溉所需的水量,并控制执行元件的开启和关闭。
3. 系统实施和调试:根据设计方案,将传感器安装在农田中,将执行元件与水源和灌溉设备连接,编写控制程序,并进行调试。
调试过程中,可以通过人机界面实时监控土壤水分数据和控制系统工作状态,以便进行调整和优化。
4. 系统运行和维护:系统实施和调试完成后,系统将自动根据土壤水分数据进行灌溉控制,提高灌溉效率和减少资源浪费。
在运行过程中,需要定期监测和校准传感器数据,以确保系统的准确性和稳定性。
综上所述,农业机械自动化控制系统的设计与实现是提高农业生产效率和质量的重要手段,可以通过应用传感器技术、自动控制技术和现代电子技术等多种技术手段来实现。
设计与实施的过程包括需求分析、系统设计、系统实施和调试以及系统运行和维护等步骤。
通过合理的设计和实施,农业机械自动化控制系统能够有效地提高农业生产的效率和质量,为农业可持续发展做出贡献。