基于三角形膜单元的钣金成形有限元逆算法
CAE理论知识
粘塑性有限元法主要用于热加工,因为在热加工过程中应变硬化效应不显著,板料变形对变形速度有较大敏感性。
AutoForm-Incremental 求解器应用了最新的有限元隐式算法,从而保证求解的迭代收敛,同时采用自适应网格、时阶控制、复杂工具描述的强有力接触算法、数值控制参数的自动决定和使用精确的全量拉格朗日理论(Total-Lagrange Theory)等保证快速求解和结果的准确性。
单元理论根据众多的研究实践,可用于冲压成形有限元模拟分析的单元有三类:基于薄膜理论的薄膜单元、基于板壳理论的壳单元和基于连续介质理论的实体单元。
1)薄膜单元薄膜单元是C0型单元,其构造格式简单、对内存要求小,但其理论基础是基于平面应力假设的薄膜理论,忽略了弯曲效应,考虑的内力仅为沿薄壳厚度均匀分布的平行于中面的应力,忽略弯矩、扭矩和横向剪切,分析弯曲效应比较明显的成形过程比较困难。
2)壳单元一般壳体单元按照壳体几何形状描述方式分为曲面单元和平板单元。
考虑消除剪切自锁和零能量模态的方法,又分为许多不同的单元,其中以Hughes-Liu(HL)单元和Belytschko-Tsay(BT)单元最为著名。
3)实体单元实体单元考虑了弯曲效应和剪切效应,而且也是0C单元,其格式比薄膜单元还要简洁,而且由于连续介质理论是三维理论,所以实体单元能处理三维成形问题。
但同时利用实体单元进行冲压问题的分析,计算时间太长,尤其是在处理像汽车覆盖件冲压成形这样的复杂三维成形问题时,其效率过于低下。
因此,除了在板料厚度较大必须使用实体单元外,像覆盖件这样复杂零件的冲压成形数值模拟一般不用实体单元。
算法格式1)显式算法显式算法包括动态显式和静态显式算法。
动态显式算法的最大优点是有较好的稳定性,采用动力学方程的中心差分格式,不用直接求解切线刚度,不需要进行平衡迭代,计算速度快,也不存在收敛控制问题,所需内存也比隐式算法要少。
静态显式法基于率形式的平衡方程组与Euler前插公式,不需要迭代求解。
CAE

塑件加工过程CAE作业姓名:学号:专业:指导老师:日期:目录1.绪论 (1)1.1有限元分析源于力学 (1)1.5有限元分析的应用 (2)2.三角形常应变膜单元(CST)的基本理论 (4)3.有限元程序中单刚形成的子函数代码: (4)3.1形成B矩阵的子函数代码 (4)3.2形成单刚矩阵的子函数代码 (5)4 有限元程序实现与验证 (6)4.2划分有限元网格 (7)4.3标注出位移约束信息和外力的加载方向和大小 (8)4.4有限元计算 (9)5结论与体会 (9)6.参考文献 (10)1.绪论有限元是一种将复杂对象进行合理的离散, 应用力学理论和计算机技术解决复杂问题的数值分析方法, 对于众多难以获得解析问题的分析具有明显的优点, 在科学研究和工程计算中得到广泛应用。
[1]1.1有限元分析源于力学平均应力m σ:J z y x m 31)(31)(31321=++=++=σσσσσσσ [2]米塞斯屈服准则:()()()[]21323222121σσσσσσσ-+-+-=[3] 屈雷斯卡屈服准则:sσσσ=-31 [4]1.2有限元分析的基本流程:化整为零(结构离散化)、单元分析、集零为整(整体分析)。
通常对于简单模型,不同部件之间一般通过节点共用来连接;然而对于复杂模型,不同部件之间如果仍然运用节点共用的方式进行连接,网格划分将变得异常艰难,有时候甚至不可能。
[5]1.3有限元分析的技术路线:标准化(理论研究:任意复杂问题 => 标准化分解,单元建模:有限种标准单元)规范化(前处理:CAD几何、力学建模、求解、后处理显示)计算机化(标准程序、模块)应用的规模化、普及性(可求解大型问题:108-1010自由度)1.4有限单元法处理弹性力学问题的基本思路是:(1)离散化将一个受外力作用的连续弹性体离散成一定数量的有限小的单元集合体。
单元之间只在结点上互相联系,亦即只有结点才能传递力。
(2)单元分析根据弹性力学的基本方程和变分原理建立单元结点力和结点位移之间的关系。
平面三角形单元有限元程序设计
.. P9 m 9 m一、题目如图1所示,一个厚度均匀的三角形薄板,在顶点作用沿板厚方向均匀分布的竖向载荷。
:P=150N/m,E=200GPa,=0.25,t=0.1m,忽略自重。
试计算薄板的位移及应力分布。
要求:1.编写有限元计算机程序,计算节点位移及单元应力。
〔划分三角形单元,单元数不得少于30个〕;2.采用有限元软件分析该问题〔有限元软件网格与程序设计网格必须一致〕,详细给出有限元软件每一步的操作过程,并将结果与程序计算结果进展比照〔任选取三个点,比照位移值〕;3.提交程序编写过程的详细报告及计算机程序;4.所有同学参加辩论,并演示有限元计算程序。
有限元法中三节点三角形分析构造的步骤如下:1〕整理原始数据,如材料性质、荷载条件、约束条件等,离散构造并进展单元编码、结点编码、结点位移编码、选取坐标系。
2〕单元分析,建立单元刚度矩阵。
3〕整体分析,建立总刚矩阵。
4〕建立整体构造的等效节点荷载和总荷载矩阵5〕边界条件处理。
6〕解方程,求出节点位移。
7〕求出各单元的单元应力。
8〕计算结果整理。
一、程序设计网格划分如图,将薄板如图划分为6行,并建立坐标系,那么X Y P X YP刚度矩阵的集成建立与总刚度矩阵等维数的空矩阵,已变单元刚度矩阵的集成。
由单元分析节点、单元的排布规律,继而通过循环计算求得每个单元对应的节点序号。
通过循环逐个计算:〔1〕每个单元对应2种单元刚度矩阵中的哪一种; 〔2〕该单元对应总刚度矩阵的那几行哪几列〔3〕将该单元的单元刚度矩阵参加总刚度矩阵的对应行列循环又分为3层循环:〔1〕最外层:逐行计算〔2〕中间层:该行逐个计算〔3〕最里层:区分为第奇/偶数个计算单元刚度的集成:[][][][][][]''''''215656665656266256561661eZeeeZeZeeeekkkKkkkkkk+⋯++=⇓=⇒==⇒==⇒=⨯⨯⨯⨯⨯⨯边界约束的处理:划0置1法适用:这种方法适用于边界节点位移分量为(含为0)的各种约束。
有限元非线性分析
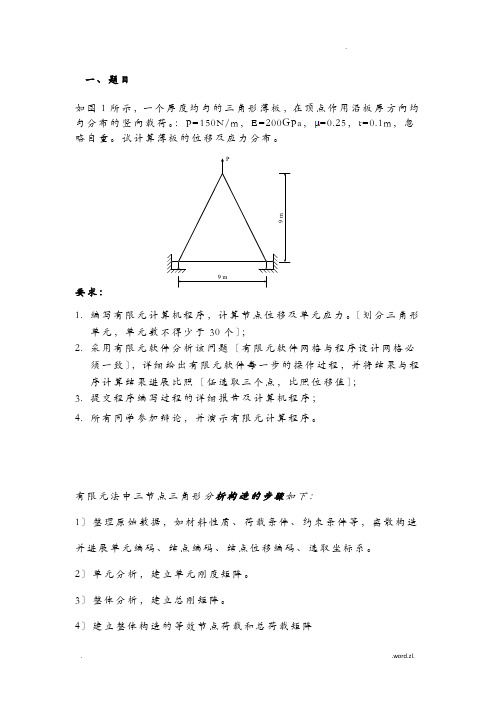
下表简要列出了线性和非线性有限元分析之间的主要不同。关于荷载-位移关系、应力-应变关系、应力-应变度量 等主要不同将在本章详细介绍。
序号 1.
特征 荷载-位移关系
2.
应力-应变关系
3.
比例缩放
4.
线性叠加
5.
可逆性
6.
求解序列
7.
计算时间
8.
用户与软件的交互
13.3 非线性的类型
2)对数应变和真实应力 对数应变/自然应变/真实应变是度量大应变的方法,计算公式如下:
它是非线性应变的度量,因此是关于最终长度的非线性函数。与线性应变相比,对数应变(或真实应变)是可加
的。考虑一个初始长度为1m的杆经过下面3步的变形: 第1步: 从1m 变形至1.2m 第2步:从1.2m 变形至1.5m 第3步:从1.5m变形至2m 在下表中我们比较了工程应变和真实应变。可以清楚地看到,只有真实应变是可加的,因此在非线性分析中应该
13.6 非线性静力分析的一般流程
一个典型的非线性静力分析项目需要以下步骤:
网格划分:有限元模型的创建是有限元分析一个非常重要的步骤,不论进行什么样的分析。在第4-7章已经讨论过对 于某些应用的如何选择适当的单元类型。FEA小组会得到零件的几何数据,需要对这些几何进行网格划分以得到零件 网格。当装配中所有的零件划分网格后,使用适当的连接单元把它们都连接在一起如CWELD或CBUSH。一般来说, 四边形单元和六面体单元优于三角形单元、楔形单元和四面体单元。应该注意模型中的关键特征,比如圆角、孔和倒 角。如果在两个平行表面之间有紧固件或焊接,应该尽量在两个面上创建相似的网格。这将有助于焊接单元或刚性单 元垂直于表面而不破坏壳单元。然而,许多有限元分析(FEA)代码支持不依赖于节点焊接,而是基于绑定接触。这 允许用户在两个焊接零件之间创建不依赖于节点的连接单元。建议首先对复杂零件进行网格划分,然后对简单或平面 几何进行网格划分以保证良好的单元质量。需要用适当的方式来模拟夹紧、铰接和焊接以在结构中正确地传递荷载。 为单元定义适当的刚度和预荷载以得到更高的精度。如果荷载从结构上的某个面传递到另一个面上,应该在两个面间 定义接触。每个FEA代码都有自己的接触参数输入格式。一个典型的接触定义需要主从节点或单元,摩擦系数,接触 面间的间隙和接触算法。
有限元逆正向法优化汽车覆盖件成形毛坯

有限元逆正向法优化汽车覆盖件成形毛坯严冰剑;李永华【摘要】具有合理的形状和尺寸的毛坯能改善覆盖件的冲压成形性能,提高材料的利用率.为克服逆向模拟得到的毛坯精度不足和形状误差问题,采用逆、正模拟结合的毛坯形状优化技术,即反向模拟预测其初始坯料形状,然后利用正向模拟进行毛坯修正,最终获得优化的毛坯形状和尺寸.以左、右后轮罩为例,在相同的成形工艺条件下,应用有限元软件Auto form模拟.结果表明,优化后零件的成形质量明显提高,并节约了材料,同时也表明该技术可用于大型覆盖件毛坯优化.【期刊名称】《沈阳理工大学学报》【年(卷),期】2016(035)002【总页数】5页(P96-99,110)【关键词】车覆盖件;逆向法;正向法;毛坯优化【作者】严冰剑;李永华【作者单位】沈阳理工大学材料科学与工程学院,沈阳110159;沈阳理工大学材料科学与工程学院,沈阳110159【正文语种】中文【中图分类】TG386.3+2汽车覆盖件的平截面不规则,底部不平,侧壁不直,多是三维异性的立体曲面件,冲压成形过程中易出现起皱、拉裂等缺陷。
影响板料成形工艺的因素很多,如板料性能、毛坯形状,模具形状、压边力大小、拉延筋布置和摩擦润滑条件等[1]。
其中,毛坯形状是覆盖件成形工艺中的重要因素[2]。
毛坯的设计是否合理直接影响到成形过程中材料的流动及可成形性。
常用的毛坯展开算法主要有经验法、滑移线法、势场模拟法、几何映射法、有限元增量法和有限元逆算法[3]。
这些方法各有利弊,具有一定局限性。
目前对于复杂汽车覆盖件的毛坯展开,使用最多的是经验法和有限元逆算法。
有限元逆算法求解速度快但精度不足,对复杂零件计算得到的毛坯存在形状误差,板料的成形质量较差。
为达到精度和效率的协调,克服有限元逆算法的不足,国内外学者提出各种改进方法。
孙开胜等[4]提出了基于截面线长度变化的毛坯迭代修正方法,对初始毛坯进行修正。
兰箭等[5]将弧长法应用到有限元逆算法中,并证明了该方法能高效和精确地预测毛坯形状。
基于有限元逆算法的拉深筋工艺设计和优化

基于有限元逆算法的拉深筋工艺设计和优化
章志兵;柳玉起;杜亭;李志刚
【期刊名称】《中国机械工程》
【年(卷),期】2006(017)019
【摘要】汽车覆盖件拉深成形中,一般通过设置适当的拉深筋控制成形过程中的板料塑性流动规律来提高覆盖件成形质量.针对覆盖件工艺设计需求,提出一种基于有限元逆算法的拉深筋工艺优化算法.该算法以灵敏度优化方法为基础,考虑了板料的成形度、破裂和起皱等成形缺陷.在板料成形模拟FASTAMP系统中,开发了拉深筋优化模块,并以实际覆盖件为例,验证了该算法能快速准确地模拟等效拉深筋力的布置情况以及优化板料的成形性.
【总页数】4页(P2013-2016)
【作者】章志兵;柳玉起;杜亭;李志刚
【作者单位】华中科技大学塑性成形模拟及模具技术国家重点实验室,武汉,430074;华中科技大学塑性成形模拟及模具技术国家重点实验室,武汉,430074;华中科技大学塑性成形模拟及模具技术国家重点实验室,武汉,430074;华中科技大学塑性成形模拟及模具技术国家重点实验室,武汉,430074
【正文语种】中文
【中图分类】TG3
【相关文献】
1.基于有限元逆算法的板料成形模拟拉深筋的灵敏度优化 [J], 易国锋;柳玉起;李明林;冯少宏
2.基于可控拉深筋的高强度板拉深性能优化及预测 [J], 周杰;阳德森;李路;华俊杰
3.汽车覆盖件成形拉深筋的有限元模拟与优化 [J], 张士宏;程幸叶;唐杰
4.车身覆盖件模具的拉深筋工艺设计和优化 [J], 胡江波;柳玉起;章志兵
5.基于可控拉深筋的高强度板盒形件拉深性能优化 [J], 阳德森;周杰;华俊杰;易宗华
因版权原因,仅展示原文概要,查看原文内容请购买。
8 第四章 用常应变三角形单元解力学平面问题 (2)解析
B——单元的应变矩阵;(它的元素仍为位置坐标的
函数)
再把(3-2)式代入物理方程,可导出用单元结点位 移列阵表示的单元应力表达式:
DB e
(3-3)
式中:
——单元内任一点的应力列阵;
D ——单元的弹性矩阵,(它与材料的特性有关)
最后利用弹性体的虚功方程建立单元结点力阵与结点位移 列阵之间的关系,即形成单元的刚度方程式:
(h)
利用形函数的这一性质可以证明,相邻单元的位 移分别进行线性插值之后,在其公共边上将是连
续的。
y
例如,对图3-3所示的单元
m
jm和ijn ,具有公共边ij。
i
由(3-23)式可知,在ij边
j
上
n
o
图3-3
x
这样,不论按哪个单元来计算,根据(3-11)式,公共边 ij上的位移均由下式表示
u Ni ui N j u j
微分数目增到建立一个描述连续体解析法大小趋于性质的偏微分方程有限单元离散化集合总体分析解有限元法连续体单元代替原连续体近似法单元分析线性方程组为平面应力问题由于结构的对称性可取结构的14来研究故所取的力学模型三有限元法算题的基本步骤力学模型的选取平面问题平面应变问题平面应力问题轴对称问题空间问题板梁杆或组合体等对称或反对称等例如
a j
bj x
cj
bm cm
x
xi
yi
1 2
aj
bj xi
c j yi
bj
x
xi
bmc j cm
x
xi
1 2
b j cm bmc j
cm
x
xi
(h)
故有
N j x, y
x xi x j xi
UG一步逆成形与DYNAFORM坯料反求
检查和修补网格(续)
g) 选择No 反转法线方向 h) 点击Exit 退出对话框 i) 点击OK 退出Mesh Repair 对话框 j) 点击Exit 退出BSE Preparation 对话框
其他选项设置如图所示,“确定”后得到了零件的中性层面。
Step 3. 下拉菜单“分析->一步可成形性分析”, 选择展开区域面,框选全部零件中性层面。
定义展开的边界约束条件为“曲线至曲线”,选择零件 端部边为约束边。
定义零件展开方向,选择图示零件面,该面的法向为钣金冲压方向。 定义材料厚度信息,确定展开区域面类型为“中位面”,材料厚度 为“2.5mm”。
DYNAFORM坯料展开
一、坯料生成的流程:
新建和保存数据库 导入零件几何模型 重命名零件层 自动曲面网格剖分 网格质量检查和修补 坯料展开计算
i. 新建和保存数据库
a) 启动Dynaform 5.7 对于PC用户: 双击桌面上的图标 , 启动Dynaform5.7
(1.进入UG建模模块下,调出 曲面编辑菜单;2.点击添加按钮, 将中位面图标打上钩;3.点击中 位面图标,弹出中位面特征对 话框;4.方法选择:偏置,然后 点击要提取中面的模型;在对 话框上切换至种子面选择,再 在模型上选择一个基准面,应 用即可。注:有时候会出现提取 错误,也许是你的陡角设置不 合理,修改一下陡角的大小就 可以了。
a) 选择PART MESH (如图) b) 从Mesher下拉列表中
选择Part Mesh c) 点击按钮Select Surfaces
自动曲面网格划分(续)
d) 点击Displayed Surf. 按钮选择所有的显 示在屏幕上的所有曲目
2 三角形有限单元法
将单元插值位移函数写成矩阵的形式:
u ( x, y ) N i u v ( x, y ) 0
0 Ni
Nj 0
0 Nj
Nm 0
简记为
u u Ni v
ui v i 0 u j Nm v j um um
(2.12)
-最小势能原理 根据最小势能原理与弹性力学求解体系的等价性,对 总势能取驻值:
0
得整体平衡方程
K a F
e e e e
e
e
(2.13)
其中
K e B T DBtdxdy
F e N Tftdxdy e N T Ttds
e s
(2.14a)
(2.1) (2.2)
0 1 0 D D 0 对 1 0 1 0 称 2
0 y x
-瑞利李兹法的位移函数
u Am F1 x, y v Bm F2 x, y
m m
对于右图所示的 任意形状的分析 物体,要找到一 个满足位移边界 条件的、全域的 位移函数,是很 困难的。
(2.6)
Nj
ai N m a j Na e a m
u i 其中, a i vi
-单元的应变矩阵
将单元插值函数(2.6)代入几何方程(2.1)得单元应变:
N i x ε L.u 0 N i y 0 N i y N i x N j x 0 N j y 0 N j y N j x N m x 0 N m y ui 0 vi N m u j y v j N m um x um
有限元作业:三角形单元求解
《有限元作业》年级2015级学院机电工程学院专业名称班级学号学生2016年05月如下图所示为一受集中力P作用的结构,弹性模量E为常量,泊松比V=1/6,厚度为I=1。
按平面应力问题计算,运用有限元方法,分别采用三角形及四边形单元求解,求节点位移及单元应力(要求三角形单元数量不少于4个,四边形单元不少于2个)图(一)图(二)三角形单元求解图(三)四边形单元求解(1)如图划分三角形单元,工分成四个分别为④(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k1 =1.0e+06 *7.2857 -3.0000 -2.1429 0.8571 -5.1429 2.1429-3.0000 7.2857 2.1429 -5.1429 0.8571 -2.1429 -2.1429 2.1429 2.1429 0 0 -2.14290.8571 -5.1429 0 5.1429 -0.8571 0-5.1429 0.8571 0 -0.8571 5.1429 02.1429 -2.1429 -2.1429 0 0 2.1429k2 =1.0e+06 *5.1429 0 -5.1429 0.8571 0 -0.85710 2.1429 2.1429 -2.1429 -2.1429 0-5.1429 2.1429 7.2857 -3.0000 -2.1429 0.85710.8571 -2.1429 -3.0000 7.2857 2.1429 -5.14290 -2.1429 -2.1429 2.1429 2.1429 0-0.8571 0 0.8571 -5.1429 0 5.1429 k3 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.14290 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429 k4 =1.0e+06 *2.1429 0 -2.1429 -2.1429 0 2.14290 5.1429 -0.8571 -5.1429 0.8571 0-2.1429 -0.8571 7.2857 3.0000 -5.1429 -2.1429 -2.1429 -5.1429 3.0000 7.2857 -0.8571 -2.14290 0.8571 -5.1429 -0.8571 5.1429 02.1429 0 -2.1429 -2.1429 0 2.1429 调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵求出的节点位移U =-0.00040.00080.00050.00100.00070.0023-0.00070.0026调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,SxyS1 =1.0e+03 *-4.4086-0.73483.5914S2 =1.0e+03 *4.4086-0.64050.4086S3 =1.0e+03 *1.8907-1.06012.1093S4 =1.0e+03 *-1.89072.10931.8907二、(1)如图划分四边形单元,工分成四个分别为(2)如图分别进行编号1、2、3、4、5、6,并建立坐标系(3)编程进行求解,得出结果,其中假设力P=2000N调用Quad2D4Node_Stiffness函数,求出单元刚度矩阵调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵求出节点位移U =0.00120.0017-0.00120.00170.00160.0049-0.00170.0052调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量S1 =1.0e+03 *0.0000-0.24782.0000S2 =1.0e+07 *0.68564.1135-1.7137程序附录一、1、三角形单元总程序:E=1e7;NU=1/6;t=1;ID=1;%调用Triangle2D3Node_Stiffness函数,求出单元刚度矩阵k1=Triangle2D3Node_Stiffness(E,NU,t,0,1,0,0,1,1,ID)k2=Triangle2D3Node_Stiffness(E,NU,t,0,0,1,0,1,1,ID)k3=Triangle2D3Node_Stiffness(E,NU,t,1,1,1,0,2,0,ID)k4=Triangle2D3Node_Stiffness(E,NU,t,2,0,2,1,1,1,ID)%调用Triangle2D3Node_Assembly函数,求出总体刚度矩阵KK = zeros(12,12);KK=Triangle2D3Node_Assembly(KK,k1,1,2,3);KK=Triangle2D3Node_Assembly(KK,k2,2,4,3);KK=Triangle2D3Node_Assembly(KK,k3,3,4,5);KK=Triangle2D3Node_Assembly(KK,k4,5,6,3)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Triangle2D3Node_Strain函数,求出应变SN1、SN2、SN3中求出的分别为SNx,SNy,SNxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];SN1=Triangle2D3Node_Strain(0,1,0,0,1,1,u1)SN2=Triangle2D3Node_Strain(0,0,1,0,1,1,u2)SN3=Triangle2D3Node_Strain(1,1,1,0,2,0,u3)SN4=Triangle2D3Node_Strain(2,0,2,1,1,1,u4)%调用Triangle2D3Node_Stress函数,求出应力,S1、S2、S3、中求出的分别为Sx,Sy,Sxyu1=[U(1);U(2);U(3);U(4);U(5);U(6)];u2=[U(3);U(4);U(7);U(8);U(5);U(6)];u3=[U(5);U(6);U(7);U(8);U(9);U(10)];u4=[U(9);U(10);U(11);U(12);U(5);U(6)];S1=Triangle2D3Node_Stress(E,NU,0,1,0,0,1,1,u1,ID)S2=Triangle2D3Node_Stress(E,NU,0,0,1,0,1,1,u2,ID)S3=Triangle2D3Node_Stress(E,NU,1,1,1,0,2,0,u3,ID)S4=Triangle2D3Node_Stress(E,NU,2,0,2,1,1,1,u4,ID)2、求刚度矩阵程序function k=Triangle2D3Node_Stiffness(E,NU,t,xi,yi,xj,yj,xm,ym,ID)%该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(6X6)%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endk= t*A*B'*D*B;3、求整体刚度矩阵function z = Triangle2D3Node_Assembly(KK,k,i,j,m)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k%输入单元的节点编号I、j、m%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;for n1=1:6for n2=1:6KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应变程序function strain=Triangle2D3Node_Strain(xi,yi,xj,yj,xm,ym,u)%该函数计算单元的应变%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入单元的位移列阵u(6X1)%输出单元的应力strain(3X1),由于它为常应变单元,则单元的应变分量为SNx,SNy,SNz%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);strain = B*u;5、求应力程序function stress=Triangle2D3Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,u,ID)%该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度t%输入三个节点i、j、m的坐标xi,yi,xj,yj,xm,ym%输入平面问题性质指示参数ID(1为平面应力,2为平面应变),单元的位移列阵u(6X1)%输出单元的应力stress(3X1),由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endstress = D*B*u;二、1、四边形单元总程序:E=1e7;NU=1/6;h=1;ID=1;%调用Quad2D4Node_Stiffness函数,求出单元刚度矩阵k1= Quad2D4Node_Stiffness(E,NU,h,0,1,0,0,1,0,1,1,ID)k2= Quad2D4Node_Stiffness(E,NU,h,1,0,2,0,2,1,1,1,ID)%调用Quad2D4Node_Assembly函数,求出求出总体刚度矩阵KK=zeros(12,12);KK= Quad2D4Node_Assembly(KK,k1,1,2,3,4);KK= Quad2D4Node_Assembly(KK,k2,3,5,6,4)% 边界条件的处理及刚度方程求解k=KK(5:12,5:12)p=[0;0;0;0;0;0;0;2000]u=k\p%支反力的计算U=[0;0;0;0;u] %为节点位移P=KK*U%调用Quad2D4Node_Stress函数,求出单元应力中的的S1、S2、S3分别为Sx,Sy,Sxy应力分量u1=[U(1);U(2);U(3);U(4);U(5);U(6);U(7);U(8)];u2=[U(5);U(6);U(9);U(10);U(11);U(12);U(7);(8)];S1= Quad2D4Node_Stress(E,NU,0,1,0,0,1,0,1,1,u1,ID)S2= Quad2D4Node_Stress(E,NU,1,0,2,0,2,1,1,1,u2,ID)2、求刚度矩阵程序function k= Quad2D4Node_Stiffness(E,NU,h,xi,yi,xj,yj,xm,ym,xp,yp,ID) %该函数计算单元的刚度矩阵%输入弹性模量E,泊松比NU,厚度h%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输出单元刚度矩阵k(8X8)%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endBD = J*transpose(B)*D*B;r = int(int(BD, t, -1, 1), s, -1, 1);z = h*r;k = double(z);3、求总体刚度矩阵程序function z = Quad2D4Node_Assembly(KK,k,i,j,m,p)%该函数进行单元刚度矩阵的组装%输入单元刚度矩阵k,单元的节点编号i、j、m、p%输出整体刚度矩阵KK%---------------------------------------------------------------DOF(1)=2*i-1;DOF(2)=2*i;DOF(3)=2*j-1;DOF(4)=2*j;DOF(5)=2*m-1;DOF(6)=2*m;DOF(7)=2*p-1;DOF(8)=2*p;for n1=1:8for n2=1:8KK(DOF(n1),DOF(n2))= KK(DOF(n1),DOF(n2))+k(n1,n2);endendz=KK;4、求应力程序function stress= Quad2D4Node_Stress(E,NU,xi,yi,xj,yj,xm,ym,xp,yp,u,ID) %该函数计算单元的应力%输入弹性模量E,泊松比NU,厚度h,%输入4个节点i、j、m、p的坐标xi,yi,xj,yj,xm,ym,xp,yp,%输入平面问题性质指示参数ID(1为平面应力,2为平面应变)%输入单元的位移列阵u(8X1)%输出单元的应力stress(3X1)%由于它为常应力单元,则单元的应力分量为Sx,Sy,Sxy%---------------------------------------------------------------syms s t;a = (yi*(s-1)+yj*(-1-s)+ym*(1+s)+yp*(1-s))/4;b = (yi*(t-1)+yj*(1-t)+ym*(1+t)+yp*(-1-t))/4;c = (xi*(t-1)+xj*(1-t)+xm*(1+t)+xp*(-1-t))/4;d = (xi*(s-1)+xj*(-1-s)+xm*(1+s)+xp*(1-s))/4;B1 = [a*(t-1)/4-b*(s-1)/4 0 ; 0 c*(s-1)/4-d*(t-1)/4 ;c*(s-1)/4-d*(t-1)/4 a*(t-1)/4-b*(s-1)/4];B2 = [a*(1-t)/4-b*(-1-s)/4 0 ; 0 c*(-1-s)/4-d*(1-t)/4 ;c*(-1-s)/4-d*(1-t)/4 a*(1-t)/4-b*(-1-s)/4];B3 = [a*(t+1)/4-b*(s+1)/4 0 ; 0 c*(s+1)/4-d*(t+1)/4 ;c*(s+1)/4-d*(t+1)/4 a*(t+1)/4-b*(s+1)/4];B4 = [a*(-1-t)/4-b*(1-s)/4 0 ; 0 c*(1-s)/4-d*(-1-t)/4 ;c*(1-s)/4-d*(-1-t)/4 a*(-1-t)/4-b*(1-s)/4];Bfirst = [B1 B2 B3 B4];Jfirst = [0 1-t t-s s-1 ; t-1 0 s+1 -s-t ;s-t -s-1 0 t+1 ; 1-s s+t -t-1 0];J = [xi xj xm xp]*Jfirst*[yi ; yj ; ym ; yp]/8;B = Bfirst/J;if ID == 1D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];elseif ID == 2D = (E/(1+NU)/(1-2*NU))*[1-NU NU 0 ; NU 1-NU 0 ; 0 0 (1-2*NU)/2]; endstr1 = D*B*u;str2 = subs(str1, {s,t}, {0,0});stress = double(str2);。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于三角形膜单元的钣金成形有限元逆算法
本文以锥形盆为例,验证了根据有限元逆算法设计的毛料展开程序在毛料展开中的有效性和精确性,实例分析表明在工程允许精度范围内,有限元逆算法可对板料成形工艺方案进行快速评价,优化冲压工艺参数,是一种有效的钣金展开算法。
0 引言
钣金成形是一种生产效率高、成形质量好的金属加工方法,被广泛地应用于航空航天、汽车、轻工业等领域,在钣金成形加工中,合理的毛料形状和尺寸能够改善材料流动和应力分布状态,使钣金件厚度分布比较均匀,提高成形极限;还能降低突耳高度,减少后续工序的切边余量,提高材料的利用率。
目前毛料展开算法主要有经验法、势场模拟法、几何映射法、有限元增量法和有限元逆算法,钣金展开有限元逆算法的基本思想是:采用形变理论即全量理论,通过最小化塑性位能函数建立毛料形状与零件形状之间的关系,求出毛料形状和零件最终构形的厚度分布。
在零件的最终构形上采用三角形膜单元进行离散,三角形膜单元具有处理简单,计算量少,计算速度快的优点,适合逆算法快速高效的要求。
主要研究了基于三角形膜单元的有限元逆算法,并用商用软件PAM-STAMP模拟验证了逆算法的准确性和可行性。
1 有限元逆算法
在板料展开有限元逆算法中采用了以下假设:
①只考虑板料变形过程中的薄膜应变效应,不考虑板料的弯曲效应;
②材料不可压缩;
③变形过程是比例加载,基于形变理论即全量理论来分析变形;
④凸模、拉延筋、压边圈对板料的接触作用简化为法向作用力和切向摩擦力;
⑤采用对数应变来描述变形。
1.1 几何方程
逆算法只考虑冲压件的初始形态和最终形态,忽略中间变形过程,应变由两种构形间的几何差别定义。
如图1所示,当物质点从C o运动到C时,有:
点击图片查看大图
点击图片查看大图
图1 变形中的几何关系
式(1)中[F]-1为:
点击图片查看大图
式(2)中u,v,w是三角形膜单元的位移函数,[I]是单位矩阵。
[F]为线性变换梯度矩阵,描述了质点从初始构形映射到现时构形中的变形。
在钣金成形加工中,板料要经历较大的弹性、塑性变形,所以采用左Cauchy-Creen应变张量[B]来描述板料的相对变形。
[B]可由变形梯度矩阵求得:
[B]=[F][F]T,
板料上一点的变形可以用该点的三个方向的主伸长λi;来表示,各点的面内主伸长分量λ1,λ2可由该点[B]-1的特征值求得:
点击图片查看大图
式(3)中的θ是面内主伸长λ与最终构形的局部坐标系X轴之间的夹角,B ij为B-1的分量。
根据塑性变形中体积不变的假设,板料上各点的厚向主伸长λ3可由式(4)得,由式(5)可求得对数应变εx,εy,εxy。
点击图片查看大图
1.2 单元类型
在零件的最终构形上采用三角形膜单元进行离散,典型的三节点三角形单元如图2所示,节点编码为i,j,m以逆时针方向为正。
每个节点有2个位移分量u,v。
点击图片查看大图
图2 三节点三角形单元
三角形单元的位移函数取一次多项式,由三个节点的位移分量表示为:
点击图片查看大图
式中N i为形函数,A为三角形膜单元的面积。
1.3 屈服准则和本构方程
在平面应力状态下,采用Hill各项异性屈服准则和全量理论,得比例加载条件下的弹塑性板材的本构方程为:
点击图片查看大图
点击图片查看大图
式(7)中{σ}为Cauchy应力张量,{ε}为应变矩阵;σ和ε分别为等效应力和等效应变,E s为等效应力应变的割线模量,矩阵[P]可由式(8)求得。
其中R0,R45,R90分别为板料的各项异性参数:
点击图片查看大图
1.4 有限元控制方程及求解
根据Hill假设,变形体在平衡状态下塑性势能最小,由于板料成形可以看作是准静力问题,体力影响可以忽略。
塑性势能可以表示为:
点击图片查看大图
式(9)中右边第一项为塑性变形能的变化率,第二项为外力的功率,可近似的表示为变形能与等效外力功的差值,根据虚功原理和力平衡方程可算出等效外力功,所以近似的塑性势能表示为:
点击图片查看大图
式(10)中W p(x)为板料的塑性变形能,W f(x)为模具与板料间的摩擦功,W d(x)为压边圈与板料间的摩擦功,W b(x)为拉延筋与板料间的摩擦功,这些量都是毛料初始位置X的函数。
用共轭梯度法方法求解时,需要给出一个初始猜测值x o,如果猜测值比较合理,可以大大提高收敛的速度。
一般采用线性映射法来获得板料的初始猜测值,其基本思想是假设两种构形之间的变形是弹性变形,给定一个毛料形状的猜测值,由该猜测值跟最终构形之间的弹性变形来求得初始猜测值。
2 有限元逆算法的模拟验证
基于以上算法,研究开发了毛料展开设计程序。
钣金件的数值建模可在CAD造型软件中完成,用三角形单元将该模型离散后,导入到毛料展开程序中,就可以得到由上述算法计算得到的零件的毛料轮廓、应力、应变和厚度变化率等信息。
2.1 锥形盆的展开和厚度变薄率
根据不可展曲面近似展开方法的合理性判断标准,由有限元逆算法展开的平面板料通过PAM-STAMP加工仿真、逆向建模得到的零件的表面积与原零件的表面积比较,相对误差在10%以内,且重建零件的变薄率小于40%,最大应变值不超过成形极限时,就说明展开的平面图形的工艺性好。
图3(a)所示的是一个半径为50mm,深度为20mm,侧壁倾角为90°,各处倒角半径为10mm的一个锥形盆的CAD模型,锥形盆的厚度为1mm,表面积为15707.96mm2。
在I-Deas中采用三角形膜单元均匀离散CAD模型,网格大小为10mm,离散后的模型如图3(b)所示。
本例计算是在Windows XP上完成的,CPU是Intel P4/1.7GHz,内存512MB。
盆的材料为AlMg3,板料的各项异性指数为1.87,材料的硬化曲线如下式所示:
点击图片查看大图
经逆算法98s运算得到的锥形盆的毛料展开轮廓如图3(b)所示。
点击图片查看大图
图3 锥形盆的离散模型和毛料展开图
把展开后的网格文件,导入到PAMSTAMP中并提取网格节点坐标信息,利用提取的信息和CATIA造型软件的的逆向建模功能重建平面展开图形,测量展开后的表面积为24132.855mm2。
计算展开前和展开后表面积的相对误差为1.08%,小于10%,可以近似的认为展开前后两者的表面积是一致的。
图4是锥形盆的厚度变薄率分布云图,图5是对称平面上的厚向变形率分布曲线。
从图4中可以看出锥形盆边缘部分的材料变厚,存在起皱的危险,而盆底变薄,最大的变薄处发生在侧壁和盆底过渡底圆角部分,最大变形率为-0.3804E,该处最可能被拉裂,与实际情况相符。
点击图片查看大图
图4 锥形盆的应变分布图
点击图片查看大图
图5 锥形盆在对称平面上的厚向变形率分布曲线
2.2 模拟结果的验证
将有限元逆算法数值模拟结果与增量有限元计算结果进行分析,可以验证逆算法有限元数值模拟结果的可靠性和准确性。
为了验证有限元逆算法的结果准确与否,根据逆算法展开的毛料轮廓的边缘向外加一个偏移量为10mm的加工余量,然后导入到有限元增量模拟软件PamStamp-2C中,并划分网格,锥形盆凸模的几何及材料参数不变,由于锥形盆是轴对称零件,为了节省计算机资源,减少计算时间,只模拟锥形盆的1/4。
经多次模拟验证得知当冲压力为3.8kN,模型的成形性能最好,经过16min20s计算后,锥形盆的厚度变薄率如图6所示。
从图中可以看出锥形盆的最大变薄处在盆底过渡底圆角部分,最大变形率为-0.3838E,与有限元逆算法的模拟结果基本一致。
图7是压边力为3.8kN时,锥形盆的FLC曲线,从图7可以发现,所有单元的应变都在FLC曲线以下,根据PAMSTAMP的判别规则可知,所有的单元都在安全区域,都没有被拉裂,这说明冲压参数的选取是合理的,符合加工工艺的要求。
点击图片查看大图
图6 压边力为3.8kN时锥形盆的变薄率云图
点击图片查看大图
图7 压边力为3.8kN时的锥形盆的FLC曲线图
3 结论
根据最小化塑性位能函数结合板料成形的情况开发了基于三角形膜单元的有限元逆算法钣金展开程序,利用编写的程序对锥形盆进行了展开和模拟计算,得到了毛坯形状和厚度变薄率云图。
将得到的结果与增量有限元模拟软件PAMSTAMP进行了比较分析,得到如下结论:
(1)使用逆算法展开后的锥形盆的表面积和展开前的面积基本一致,表明逆算法具有较高的计算精度,展开的平面图形的工艺性较好。
(2)通过逆算法模拟还可以得到冲压工件最终构形上的厚度变化。
通过比较厚度变薄率,发现逆算法的模拟结果与PAMSTAMP的模拟结果基本一致,说明有限元逆算法可快速预测板料在最终构形上的变化情况,从而可以分析潜在的成形缺陷,预测板料的成形性能。
(3)有限元逆算法采用全量理论的本构关系,只考虑初始构形和最终构形,从而提高了计算速度,比使用PAMSTAMP速度更快,时间更短,节省了大量的计算时间,
总之,有限元逆算法是一种有效的钣金展开算法,能应用到钣金零件的早期设计阶段以及工艺参数的优化设计中,快速简单,在冲压工艺及模具设计中具有良好的发展前景。