高精度捷联惯导系统的系统级标定方法
捷联惯导系统加速度计标度因数和安装误差的试验标定

捷联惯导系统加速度计标度因数和安装误差的试验标定
杨常松;徐晓苏
【期刊名称】《测控技术》
【年(卷),期】2005(024)012
【摘要】研究了捷联惯导系统惯性测量组合中加速度计标度因数和安装误差的标定问题.对捷联惯性测量组合中3路加速度计建立了输出模型,提出了在三轴转台上采用多位置试验对加速度计标度因数和安装误差进行标定的方法.实验表明,本方法能够有效地标定出惯性测量组合中加速度计的标度因数和安装误差,具有较高的精度,对提高捷联惯导系统的精度有着重要的作用.
【总页数】3页(P57-59)
【作者】杨常松;徐晓苏
【作者单位】东南大学,仪器科学与工程系,江苏,南京,210096;东南大学,仪器科学与工程系,江苏,南京,210096
【正文语种】中文
【中图分类】U666.16
【相关文献】
1.基于谐波分析的捷联惯导系统加速度计组件标定技术 [J], 杨鹏翔;秦永元;李旦;周琪
2.一种捷联惯导系统加速度计时间延迟参数标定方法 [J], 邵会兵;王彬;申亮亮
3.无陀螺捷联惯导系统加速度计安装误差研究 [J], 汪小娜;王树宗;朱华兵
4.捷联惯导系统陀螺安装误差的精确标定方法 [J], 万彦辉;裴听国;秦永元
5.光纤捷联惯导系统加速度计内杆臂标定方法 [J], 周广涛;许伟通;叶攀
因版权原因,仅展示原文概要,查看原文内容请购买。
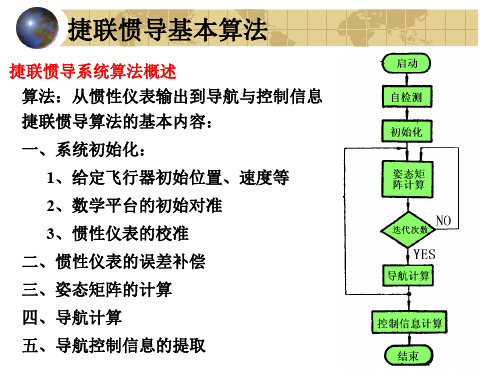
捷联惯导系统算法.ppt
cos
b Ebz
注意事项:当 θ= 90 度时,方程出现奇点
姿态计算 矩阵方程精确解1
二、方向余弦矩阵微分方程及其解 C C
其中
C bE
CbE
b Eb
0
b Eb
z
z
0
y
x
y x
0
由于陀螺仪直接测得的是载体 相对惯性空间的角速度,所以:
CbE
b ib
E iE
C
E b
或四元数微分方程:
q(t)
(
b ib
b iE
)q(t)
注意事项: 1、上述两个方程中的角速度表达式不一样 2、方程第二项较小,计算时速度可以低一些
增量算法 矩阵方程精确解
一、角增量算法
角增量:陀螺仪数字脉冲输出,每个脉冲代表一个角增量
一个采样周期内,陀螺输出脉冲数对应的角增量为:
C
0
0
c os
0 0 0 sin
sin
sin
c os
cos cos
求解欧拉角速率得
1 0
0
cos
0 sin
惯性器件的误差补偿
姿态计算 欧拉角微分方程1
姿态矩阵的计算 假设数学坐标系模拟地理坐标系 飞行器姿态的描述:
航向角ψ、俯仰角θ、滚动角γ 一、欧拉微分方程
从地理坐标系到载体坐标系 的旋转顺序:
Ψ →θ →γ
捷联惯导系统静基座的高精度初始对准方法

捷联惯导系统静基座的高精度初始对准方法
王雪瑞;周岩
【期刊名称】《洛阳理工学院学报(自然科学版)》
【年(卷),期】2017(027)001
【摘要】针对捷联惯导系统静基座初始对准存在精度低的问题,通过加速度计和陀螺仪获得重力矢量和地球角速度矢量,采用解析方法快速地估算出一个满足要求的初始姿态矩阵.借助卡尔曼滤波模型对系统的误差进行分析,并建立系统的状态方程和量测方程,将系统失准角从干扰误差中估算出来,为导航计算提供精确的初始条件.仿真实验结果表明,将卡尔曼滤波技术引入到捷联惯导系统静基座的高精度初始对准过程中,使对准精度和收敛速度均得到了显著改善.
【总页数】5页(P70-74)
【作者】王雪瑞;周岩
【作者单位】河南工程学院计算机学院,河南郑州 451191;河南工程学院计算机学院,河南郑州 451191
【正文语种】中文
【中图分类】TP273.4
【相关文献】
1.Unscented粒子滤波在静基座捷联惯导系统大方位失准角初始对准中的应用研究 [J], 丁杨斌;申功勋
2.捷联惯导系统静基座初始对准精度分析及仿真 [J], 严恭敏;秦永元
3.静基座速率偏频激光陀螺捷联惯导系统快速高精度初始对准算法 [J], 张岩;吴文启;张晓强;曹聚亮
4.捷联惯导系统的静基座快速初始对准方法 [J], 房建成;万德钧
5.采用小波神经网络的捷联惯导系统静基座快速初始对准 [J], 盛景泉;付梦印;刘永信
因版权原因,仅展示原文概要,查看原文内容请购买。
一种单轴旋转捷联惯导系统高精度快速对准方法

一种单轴旋转捷联惯导系统高精度快速对准方法刘永红;刘明雍;谢波【摘要】It needs prolonging the coarse alignment time to improve the accuracy of the coarse alignment under the rocking condition.Otherwise,it can’t control the azimuth error in the small range,then the fine alignment will converge slowly.To solve this problem,a high accuracy and fast alignment method which uses reverse navigation technology is put forward for rotary SINS.This method prolongs the coarse alignment time mostly,then saves the data of SINS to carry on fine alignment.It use the data of alignmet sufficiently and improve the alignment accuracy mostly in certain alignment time.The result of test indicated this method is not only reduce amount of calculation,but also simplify the algorithm ,it can also achieve fast alignment of rotary SINS and can acquire high accuracy.All this characteristics prove that the method is valuable in engineering application.%在晃动条件下,需要延长粗对准时间来提高粗对准精度。
捷联惯导在线标定技术

龙源期刊网
捷联惯导在线标定技术
作者:全振中石志勇王毅
来源:《现代电子技术》2012年第09期
摘要:捷联惯导在线标定技术对于提高导航载体的机动性和导航的准确性至关重要。
充
分阐述了捷联惯导在线标定技术研究现状,对在线标定中的误差建模、可观测性分析、最优误差激励方式的选择以及参数估计进行了深入分析和归纳。
指出了在线标定技术进一步的研究方向,对在线标定技术的了解和深入研究具有一定的指导意义。
关键词:在线标定;估计;惯性导航系统;导航载体。
捷联惯导

坐标系的定义
1. 地理坐标系(下标为t)—— OXtYtZt :O 取载体质心,Xt 轴指向东,Yt 轴指向北,Zt 轴沿垂线指向天。 2. 导航坐标系(下标为n)—— OX nYnZn :O 取载体质心,Zn与 Zt 重合,Xn 与 Xt,Yn 与 Yt 相差一个游动方
C13
C23
C33
位置速率
p ep
位置速率是由飞行器地速的水平分量引起的,由于平台坐标系与地理坐标系相差 一个游动方位角,
可得:
VVENtt
cos sin
sin cos
VEp VNp
p ep
可写成
p epE
C32 C31
180 ,180
1.求纬度的真值L
L L 反正弦函数的主值域与L的定义域一致,因此:
主
2.求经度的真值
反正切函数的主值域是 90 ,90 与 的定义域不一致,因此需要在 的定义域内确定经度的真值。
由: 主
tan 1
C32 C31
tan 1
cos L sin cos L cos
其中:
.
V ep 平台系相对地球的加速度向量
f 加速度计测量的比力向量
2ie ep V ep 无明显物理意义,又称有害加速度
g 重力加速度向量
整理上式可得:
.
VEp
.
VNp
.
VUp
f
p E
一种捷联惯导系统的陀螺在线标定方法
e f f e c t i v e l y.At t h e s a me t i me ,t h i s me t h o d c o u l d i mp r o v e t h e p r e c i s i o n o f t h e n a v i g a t i o n a n d b r i n g g r e a t c o n v e n i e n c e or f e n g i n e e r i n g a p p l i c a t i o n .
v e l o c i y t a n d t h e a z i mu t h s i g n a l s f r o m t h e i n e r t i a l n a v i g a t i o n s y s t e m i n t wo a p p r o x i ma t e l y h o r i z o n t a l p o s i t i o n s .T h e e ro r s o f
a c c e p t a b l e .I t i s p r o v e d b y t h e ie f l d t e s t t h a t t h i s me t h o d i s e a s y t o b e i mp l e me n t e d a n d c o u l d p e r f o r m g y r o s e l f - c a l i b r a t i o n
2 0 1 3年 第 1 期 总第 3 2 4 期
文章 编 号 :1 0 0 4 — 7 1 8 2 ( 2 0 1 3 ) 0 1 — 0 0 1 7 — 0 4
导 弹 与 航 天 运 载 技 术
捷联惯导详细讲解
捷联惯导系统从20世纪60年代初开始发展起来,在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-downinertialnavigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在导弹需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
一、捷联惯导系统工作原理及特点惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。
捷联惯导系统(SINS)是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
由于惯性元器件有固定漂移率,会造成导航误差,因此导弹通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位置参数。
如采用指令+捷联式惯导捷联惯导系统能精确提供载体的姿态、地速、经纬度等导航参数,是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点。
除此以外捷联惯导系统的最大特点是没有实体平台,即将陀螺仪和加速度计直接安装在机动载体上,在计算机中实时的计算姿态矩阵,通过姿态矩阵把导航加速度计测量的载体沿机体坐标系轴向的加速度信息变换到导航坐标系,然后进行导航计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
兵 工 自动 化
Or d na nc e I n d us t r y Aut oma t i o n ・5 3・
3 2 ( 1 0 )
高精度 捷 联惯 导 系统 的系统 级标 定方 法
康 宇航 ,周 绍磊 , 匡 宇 , 祁 亚辉
( 1 .海 军航 空 工程 学 院控 制科 学 与工 程系 ,山东 烟 台 2 6 4 0 0 0 ; 2 .江 西 农 业 大 学 计 算 机 与 信 息 工 程 学 院 , 南 昌 3 3 0 0 4 5 )
i n e r t i a l n a v i g a t i o n s y s t e m( S I NS ) , t h e e r r o r mo d e l o f t h e o u t p u t c a n b e d e r i v e d . T h e n t h r o u g h p r o p e r p o s i t i o n s a n d r o t a t i o n s ,
p a r a me t e r s c a n b e c o r r e c t e d c o n t i n u o u s l y a n d n a v i g a t i o n e r r o r wo u l d d e c r e a s e a s we l 1 . T h e a n a l y s i s r e s u l t s p r o v e t h a t t h e
me t h o d i s v e r y s i mpl e , h a s h i g h c a l i b r a t i o n p r e c i s i o n a n d wi t h o u t s t r i c t l y l e v e l a n d n o r t h s e e k i n g . I t me e t s r e q u i r e me n t s o f
N vi g a t i o n S ys t e m
Ka n g Y u h a n g , Z h o u S h a o l e i , Ku a n g Y u , Qi Y a h u i
( 1 . De p a r t me n t o f C o n t r o l S c i e n c e& E n g i n e e r i n g , Na v a l A e r o n a u t i c a l &As t r o n a u t i c a l U n i v e r s i t y , Y a n t a i 2 6 4 0 0 0 , C h i n a ; 2 . S c h o o l o f C o m p u t e r &I n f o r m a t i o n E n g i n e e r i n g , J i a n g x i A g r i c u l t u r a l U n i v e r s i t y , Na n c h a n g 3 3 0 0 4 5 , C h i n a )
摘 要 :针对 现 有 的标 定技 术存 在较 大误 差 、且误 差 随着 位 置偏 离的增加 而增加 的 问题 ,提 出一 种迭 代 求解 的方
法 。基 于 高精度 捷 联惯 导 系统 的 一般 输 出模 型 ,推导 出误 差模型 ,通 过 简单 的位 置编排 ,激发 出导 航速 度误 差 ,反 推 出误 差参 数 ,并 不 断修 正输 出模 型 参数 ,使导 航误 差不 断减 小 ,达到 高精 度 捷联 惯 导 系统标 定 目的。分 析结 果证
Ab s t r a c t :Ai mi n g a t t h e l a r g e e r r o r o f c u r r e n t c a l i b r a t i o n me t ho d ,a n d e r r o r i s i n c r e a s e d wh e n p os i t i o n d e p a r t u r e i n c r e a s i n g ,p u t f o r wa r d a i t e r a t i v e s o l u t i o n me t h o d .Ba s e d o n t h e g e n e r a l o u t p u t mo d e l o f t h e h i g h - p r e c i s i o n s t r a p d o wn
e x c i t i n g s p e e d e r r o r o f t h e n a v i g a t i o n s y s t e ms , t h e e r r o r p a r a me t e r s c a n b e d e d u c e d . Th e n wi t h i t e r a t i v e a l g o r i t h m, mo d e l
明 :该 方 法标 定精 度 高 、方 法 简单 ,无 需精 确 的寻 平和 寻 北 ,能 够满足 导航 需要 ,具有 较 高的工程 实用价值 。
关 键 词 :捷 联 惯 导 系统 ; 系统级 标 定 ;最 小二 乘 ;迭代 中图分 类 号 :T J 8 6 1 文献 标志 码 :A
S y s t e ma t i c Ca l i b r a t i o n Me t h o d f o r Hi g h — P r e c i s i o n S t r a p d o wn I n e r t i a l