基于ARM的开关磁阻电动机控制系统设计
基于ARM架构的嵌入式智能控制系统设计

基于ARM架构的嵌入式智能控制系统设计随着科技的不断发展,嵌入式智能控制系统在各个领域中得到了广泛应用。
而基于ARM架构的嵌入式智能控制系统由于其高性能、低功耗等优势,成为了市场上最受欢迎的选择之一。
本文将探讨基于ARM架构的嵌入式智能控制系统设计的相关内容。
一、ARM架构简介ARM架构是一种精简指令集计算机(RISC)架构,其设计主要用于低功耗、高效能的嵌入式系统。
ARM架构的特点是指令集精简、指令执行速度快、功耗低、体积小、成本低等。
由于这些特点,ARM架构成为了嵌入式系统设计中的首选。
二、嵌入式智能控制系统的设计要求嵌入式智能控制系统的设计要求通常包括以下几个方面:高性能、低功耗、稳定可靠、易于开发和维护等。
基于ARM架构的嵌入式智能控制系统能够满足这些要求,因此在工业控制、智能家居、智能交通等领域得到了广泛应用。
三、嵌入式智能控制系统设计的关键技术1. 处理器选择:在设计嵌入式智能控制系统时,选择合适的ARM处理器是至关重要的。
不同的应用场景需要不同的处理器性能,因此需要根据实际需求选择适合的ARM处理器。
2. 操作系统选择:嵌入式智能控制系统通常需要运行一个操作系统来管理硬件资源和提供应用程序的运行环境。
常见的嵌入式操作系统有Linux、Android等,选择合适的操作系统对系统性能和功能的实现有重要影响。
3. 通信技术:嵌入式智能控制系统通常需要与其他设备进行通信,如传感器、执行器等。
常用的通信技术包括UART、SPI、I2C、以太网等,根据实际需求选择合适的通信技术。
4. 电源管理:嵌入式智能控制系统通常需要工作在低功耗状态下,因此需要合理设计电源管理模块,以降低功耗并延长系统的工作时间。
5. 硬件接口设计:嵌入式智能控制系统通常需要与各种外部设备进行接口连接,如传感器、执行器等。
合理设计硬件接口,确保系统能够稳定可靠地与外部设备进行通信。
四、嵌入式智能控制系统设计实例以智能家居系统为例,介绍基于ARM架构的嵌入式智能控制系统的设计。
基于ARM9的直流电机控制系统的设计
基于ARM9的直流电机控制系统的设计沈阳航空航天大学2010年6月摘要随着我国经济的高速发展,微电子技术、计算机技术和自动控制技术也得到了迅速发展,直流电机调速技术已经进入一个崭新的时代,其应用越来越广。
而作为控制核心的各种单片机芯片也在不断的更新发展,其功能越来越强大。
随着人们对其要求的提高,直流电机控制系统的调速方法也相应的产生了PWM(脉宽调制技术),其控制芯片也由原来常用的51单片机系列升华为ARM系列的控制实验板。
本设计基于ARM9开发板的直流电机控制系统的调速,以显示ARM开发板的独特功能,利用脉宽调制技术,调节占空比以达到调节转速的目的,将测得的数据传给上位机后进行观测。
设计大体上分为硬件设计和软件设计两部分,硬件部分包括驱动模块,控制模块,数据检测模块以及通信模块,软件部分包括程序设计,两大部分实现了对电机转速的监测和控制,更好的确保了设计的准确性。
通过合理的选择和设计提高了直流电机控制系统调速的技术,学习和研究新型控制芯片,使设计达到了较为理想的控制效果是本设计的宗旨。
关键词:ARM9开发板;PWM技术;PID调节功能AbstractAlong with the rapid development of Chinese economy, microelectronics technology, computer technology and automatic control technology is rapidly developing, dc motor control technology has entered a new era, the more and more wide application. As the core of MCU control chip are constantly updated development, its function and more powerful.As for the people, the control system of dc motor control method and the corresponding produce the pulse width modulation (PWM) and its control chip technology is used by the original sublimated 51-series microcomputer series of control board ARM series. The design is based on ARM9 development board of the control system of dc motor speed, in order to show the ARM development board, using the unique function of PWM technology, SHCH adjustment in order to achieve the goal, will adjust speed measurement data to PC and software it. General design of hardware design and software design is divided into two parts, hardware part includes driver module, control module, data communication module, and the software module includes programming module, two most of the monitoring and control motor speed, better ensure the accuracy of the design.Through the reasonable selection and design of dc motor control system to improve the speed of technology, learning and research, new control chip design to the ideal control effect is the design purpose.Keywords: ARM9 Board; PWM;PID Adjustment Function目录1绪论 (1)1.1毕业设计立题意义 (1)1.2研究内容及目标 (3)1.3 毕业设计内容分析 (3)2总体方案设计 (4)2.1直流电机控制系统的总体设计思想 (4)2.2硬件部分设计 (5)2.3软件部分设计 (5)3硬件设计方案 (6)3.1 ARM9开发板简介 (6)3.2 驱动模块设计 (7)3.2.1 S3C2440芯片简介 (7)3.2.2 SPGT62C19B电机控制模组简介 (8)3.3数据检测模块设计 (10)3.3.1 PWM技术简介 (10)3.3.2直流电机电枢PWM调压调速原理 (10)3.3.3直流电机调速系统的整体结构 (11)3.3.4 ARM的脉宽调制PWM描述 (11)3.4控制模块设计 (13)3.5 通信模块设计 (14)3.5.1 RS232的串口通信接线 (14)3.5.2 串口通信 (15)4软件方案设计 (17)4.1 系统软件设计步骤 (17)4.2 编程环境设置 (19)4.3 程序设计 (20)4.3.1系统初始化 (20)4.3.2中断子程序设计 (21)4.3.3 PWM调速程序设计 (22)4.3.4 串口通信程序设计 (23)5直流电机控制系统综合调试与分析 (25)5.1 硬件电路调试 (25)5.2 利用H-JTAG调试程序 (26)5.3系统联调结果与分析 (27)结论 (29)社会经济效益分析 (30)参考文献 (31)致谢 (32)附录ⅠS3C2440A芯片原理图 (33)附录Ⅱ程序清单 (34)1绪论随着我国经济的高速发展,微电子技术、计算机技术和自动控制技术也得到了迅速发展,直流电机调速技术已经进入一个崭新的时代。
基于ARM的电动自行车控制系统设计
Co r ls s e o lc r c bi s d o ARM nt o y -mi g,LU n - i n Li g x a,CHEN i a g Ha -y n
( ol eo lcr a E gn eig hj n nvr t,H n zo 0 7 hn ) C l g f etcl n ier ,Z e a gU i s y a gh u3 2 ,C ia e E i n i ei 1 0
展 性 ; 时 重 点 介 绍 了 系 统 主 要 功 能 的 硬 件 和 软件 实 现方 案 , 系 统 采 取 优 良的 控 制 策 略 改 善 了 电动 自行 车 基 本 功 能 , 有 电动 、 同 该 具 巡
航、 助力等模式 , 并利用 T T显示运行状态 , F 改善 了用户体验 。研究结果 表明 , 系统 电机速 度调 节平 稳 、 该 快速 , 人机交互友好 , 硬件
ee t c cu s r b o t mo e a d i p rtn t ts w r ip a e n t e T l c r , r ie o o s d n t o e a i g sae e e d s l y d o h , h s t e u e x e i n e wa mp o e .T e r s l i s t u h s r e p re c s i r v d h e ut s id c t h t te s e d r g lt n i s a y a d r p d,h n ma h n n e fc s fin l ,h a d r s c n ie a d t e p oe t n n ia e t a h p e e u ai s t d n a i t e ma — c i e it r e i r d y t e h r wae i o cs n h r tc i o e a e o
开关磁阻电机控制系统的结构组成。

开关磁阻电机控制系统的结构组成包括以下几个方面:控制器:控制器是开关磁阻电机控制系统的核心部分,它根据输入的指令信号,经过处理后,向电机的主电路输出相应的控制信号,控制电机的转速和转向。
控制器主要由功率电路和控制电路组成,其中功率电路主要完成对电机主电路的控制,而控制电路则负责接收和处理输入的指令信号。
功率变换器:功率变换器是开关磁阻电机控制系统的重要组成部分,它能够根据控制器的控制信号,对电机的输入电源进行调制,从而实现对电机转矩和转速的控制。
功率变换器一般由开关管、二极管等电子元件组成。
位置检测器:位置检测器用于检测电机的转子位置和转速,将检测到的信号反馈给控制器,控制器再根据反馈信号调整控制信号,实现电机的闭环控制。
开关磁阻电机:开关磁阻电机是开关磁阻电机控制系统的被控对象,它是一种双凸极可变磁阻电机,其转子的凸极和定子的凸极相对,当电流通过电机绕组时,产生磁场使转子旋转。
总的来说,开关磁阻电机控制系统通过控制器、功率变换器、位置检测器和开关磁阻电机的协同工作,实现对电机的高效、精确控制。
基于ARM的嵌入式移动机器人控制系统的设计
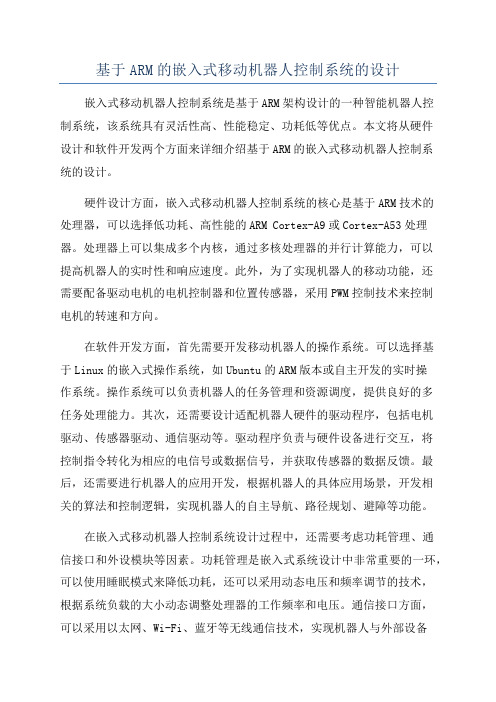
基于ARM的嵌入式移动机器人控制系统的设计嵌入式移动机器人控制系统是基于ARM架构设计的一种智能机器人控制系统,该系统具有灵活性高、性能稳定、功耗低等优点。
本文将从硬件设计和软件开发两个方面来详细介绍基于ARM的嵌入式移动机器人控制系统的设计。
硬件设计方面,嵌入式移动机器人控制系统的核心是基于ARM技术的处理器,可以选择低功耗、高性能的ARM Cortex-A9或Cortex-A53处理器。
处理器上可以集成多个内核,通过多核处理器的并行计算能力,可以提高机器人的实时性和响应速度。
此外,为了实现机器人的移动功能,还需要配备驱动电机的电机控制器和位置传感器,采用PWM控制技术来控制电机的转速和方向。
在软件开发方面,首先需要开发移动机器人的操作系统。
可以选择基于Linux的嵌入式操作系统,如Ubuntu的ARM版本或自主开发的实时操作系统。
操作系统可以负责机器人的任务管理和资源调度,提供良好的多任务处理能力。
其次,还需要设计适配机器人硬件的驱动程序,包括电机驱动、传感器驱动、通信驱动等。
驱动程序负责与硬件设备进行交互,将控制指令转化为相应的电信号或数据信号,并获取传感器的数据反馈。
最后,还需要进行机器人的应用开发,根据机器人的具体应用场景,开发相关的算法和控制逻辑,实现机器人的自主导航、路径规划、避障等功能。
在嵌入式移动机器人控制系统设计过程中,还需要考虑功耗管理、通信接口和外设模块等因素。
功耗管理是嵌入式系统设计中非常重要的一环,可以使用睡眠模式来降低功耗,还可以采用动态电压和频率调节的技术,根据系统负载的大小动态调整处理器的工作频率和电压。
通信接口方面,可以采用以太网、Wi-Fi、蓝牙等无线通信技术,实现机器人与外部设备的数据交换和控制指令的传输。
外设模块可以包括摄像头、激光雷达、超声波传感器等,通过外设模块可以实现机器人的感知和环境理解能力。
总之,基于ARM的嵌入式移动机器人控制系统的设计需要进行硬件设计和软件开发,并考虑功耗管理、通信接口和外设模块等因素。
开关磁阻电机控制系统

开关磁阻电机控制系统摘要:开关磁阻电机(SRM)是一种新型调速电机,是继变频调速系统、无刷直流电动机调速系统的最新一代调速系统。
它的结构简单坚固,调速范围宽,系统可靠性高,可以进一步提升系统的安全稳定性。
关键词:驱动系统;电动机;开关磁阻电机1引言开关磁阻电机是SRD系统中实现能量转换的部件,也是SRD系统有别于其他电动机驱动系统的主要标志。
与反应式步进电机相似,SR电机系双凸极源可变磁阻电动机,其定,转子的凸极均由普通硅钢片叠压而成,且定,转子极数不同。
定子上装有简单的集中绕组,转子只由叠片构成,没有绕组和永磁体。
功率变换器向SR 电机提供运转所需的能量,由蓄电池和交流电整流后得到知的直流电供电。
控制器是系统的中枢。
它综合处理速度指令,速度反馈信号及电流传感器,位置传感器的反馈信息,控制功率变换器中道主开关器件的工作状态。
2电动机的种类区分如今最常使用的电动机分别有一下四类(1)直流电动机直流电动机的成本低廉、电路简单、易于实现平滑调速,同时有着良好的四象限运行能力,满足用于电动汽车的部分需求。
然而传统直流电机存在机械换向器和电刷,运行中会产生电火花和电磁辐射,从而干扰到车辆的电子控制系统,不利于车联网体系的建立。
除此之外,机械换向器有着极为复杂的结构,难以简单制造且使车速到达高速。
(2)交流感应电机交流感应电机一般采用六用鼠笼型的结构,对比与其他电机,三相鼠笼型电动机成本较低,运行效率高,拥有良好的可靠性的同时便于维修的优点,而且体积小。
通过一定的控制策略,,交流感应电机也可以实现类似于直流电机的良好调速特性。
但与此同时,交流感应电机用电量大,在使用过程中发热严重,调速性能不佳,控制系统复杂且需要一定的成本。
(3)无刷永磁电机永磁电机是一种高性能新兴电机。
永磁无刷直流电机结构中不含换向器和电刷,这样一来永磁电机一方面继承了直流电机优秀的调速性能又避免了机械换向器和电刷带来的负面影响。
相较于此前介绍的几种电机,永磁电机有更高的功率和转矩,极限转速高、制动性能好。
基于ARM的双电机控制实验平台设计
引 言
本 文 使 用 TI 公 司的 S t e l l a r i s LM3 S 9 B9 6微 控 制 器 和
ADI 公 司的 1 6位 D/ A 芯 片 AD 5 7 5 2为 核 心 , 设 计 了控 制
相连 , 控 制 模 拟 电压 的输 出实 现 双 电机 转 速 之 间 的 匹 配 关
电路 。实 现 了对 两 台安 川 伺 服 电 机 的 远 程 控 制 。实 验 结
果表 明, 该 控 制 电路 具 有 较 好 的 拓 展 性 , 能 实 现 多 终 端 智 能 控 制 网络 的组 建 , 具 有 一 定 的 工 程应 用 价值 。
专 题 论 述
基于 A RM 的 双 电机 控 制 实 验 平 台 设 计
张寅 。 袁 刚
( 中 国 科学 院 苏 州 生 物 医 学 工程 技 术 研 究 所 影像 室 , 苏州 2 1 5 1 6 3 )
摘 要 :以 LM3 S 9 B 9 6和 AD 5 7 5 2为核 心 , 设 计 了控 制 卡 , 解 决 了主 机 和从 机 在 帧 长度 不 同的 时候 进 行 同 步 串行 通 信 的 问 题, 并 结 合安 川伺 服 电机 , 搭 建 起 双 电机 控 制 算 法 实验 平 台。 实验 表 明 , 该 实验 平 台能 够 用 于控 制 算 法 测 试 验 证 。 同 时 ,
该 控 制 卡 也 适 用 于 智 能 分布 式控 制 系统 的 组 建 。
关 键 词 :L M3 S 9 B 9 6 ; AD 5 7 5 2 ; S S I ; 运 动 控 制
《开关磁阻电机》课件
电动汽车的驱动系统需要能够提供更高的扭矩和功率,同时还要具备较 高的可靠性和效率。开关磁阻电机能够满足这些要求,因此在一些高端 电动汽车中得到了应用。
在工业领域的应用
工业领域是开关磁阻电机的重要应用领 域之一,特别是在需要高扭矩、高可靠
性、高效率和高寿命的场合。
发展
开关磁阻电机在发展过程中不断改进和优化,以提高效率、降低成本、减小体积和重量等方面取得显著进展。目 前,开关磁阻电机已经在工业自动化、电动车、家用电器等领域得到广泛应用。
特点与优势
特点
开关磁阻电机具有结构简单、成本低、可靠性高、效率高、调速范围宽等优点。
开关磁阻电机具有更高的能效和可靠性,适 用于需要频繁启动、制动和调速的场合。此外,开关磁阻电机的控制系统简单, 维护方便,适用于各种恶劣环境。
开关磁阻电机的设计、制造和控制系 统已经得到了很大的发展,但仍存在 一些挑战和问题需要进一步研究和解 决。
对未来研究的展望
随着技术的不断进步和应用需求的不断提高,开关磁阻电 机的性能和功能需要进一步优化和完善。
未来的研究将更加注重开关磁阻电机的智能化、高效化、 小型化和轻量化等方面的研究,以适应更加复杂和多变的 应用场景。
在工业领域中,开关磁阻电机主要用于 驱动各种机械设备,如压缩机、泵、风 机、传送带等。由于其高效、可靠、维 护成本低等优点,开关磁阻电机在工业
领域中得到了广泛应用。
在工业自动化和智能制造领域,开关磁 阻电机的高效性和可靠性也得到了广泛 应用,如机器人关节驱动、自动化生产
线等。
在家用电器领域的应用
家用电器是开关磁阻电机的重要应用领域之一,特别是在需要高效、低噪音、低 维护成本的家电产品中。
基于ARM9的直流电机控制系统的设计说明
基于ARM9的直流电机控制系统的设计航空航天大学2010年6月摘要随着我国经济的高速发展,微电子技术、计算机技术和自动控制技术也得到了迅速发展,直流电机调速技术已经进入一个崭新的时代,其应用越来越广。
而作为控制核心的各种单片机芯片也在不断的更新发展,其功能越来越强大。
随着人们对其要求的提高,直流电机控制系统的调速方法也相应的产生了PWM(脉宽调制技术),其控制芯片也由原来常用的51单片机系列升华为ARM系列的控制实验板。
本设计基于ARM9开发板的直流电机控制系统的调速,以显示ARM开发板的独特功能,利用脉宽调制技术,调节占空比以达到调节转速的目的,将测得的数据传给上位机后进行观测。
设计大体上分为硬件设计和软件设计两部分,硬件部分包括驱动模块,控制模块,数据检测模块以及通信模块,软件部分包括程序设计,两大部分实现了对电机转速的监测和控制,更好的确保了设计的准确性。
通过合理的选择和设计提高了直流电机控制系统调速的技术,学习和研究新型控制芯片,使设计达到了较为理想的控制效果是本设计的宗旨。
关键词:ARM9开发板;PWM技术;PID调节功能AbstractAlong with the rapid development of Chinese economy, microelectronics technology, computer technology and automatic control technology is rapidly developing, dc motor control technology has entered a new era, the more and more wide application. As the core of MCU control chip are constantly updated development, its function and more powerful.As for the people, the control system of dc motor control method and the corresponding produce the pulse width modulation (PWM) and its control chip technology is used by the original sublimated 51-series microcomputer series of control board ARM series. The design is based on ARM9 development board of the control system of dc motor speed, in order to show the ARM development board, using the unique function of PWM technology, SHCH adjustment in order to achieve the goal, will adjust speed measurement data to PC and software it. General design of hardware design and software design is divided into two parts, hardware part includes driver module, control module, data communication module, and the software module includes programming module, two most of the monitoring and control motor speed, better ensure the accuracy of the design.Through the reasonable selection and design of dc motor control system to improve the speed of technology, learning and research, new control chip design to the ideal control effect is the design purpose.Keywords: ARM9 Board; PWM;PID Adjustment Function目录1绪论 (1)1.1毕业设计立题意义 (1)1.2研究容及目标 (3)1.3 毕业设计容分析 (3)2总体方案设计 (4)2.1直流电机控制系统的总体设计思想 (4)2.2硬件部分设计 (5)2.3软件部分设计 (5)3硬件设计方案 (6)3.1 ARM9开发板简介 (6)3.2 驱动模块设计 (7)3.2.1 S3C2440芯片简介 (7)3.2.2 SPGT62C19B电机控制模组简介 (8)3.3数据检测模块设计 (10)3.3.1 PWM技术简介 (10)3.3.2直流电机电枢PWM调压调速原理 (10)3.3.3直流电机调速系统的整体结构 (11)3.3.4 ARM的脉宽调制PWM描述 (11)3.4控制模块设计 (13)3.5 通信模块设计 (14)3.5.1 RS232的串口通信接线 (14)3.5.2 串口通信 (15)4软件方案设计 (17)4.1 系统软件设计步骤 (17)4.2 编程环境设置 (19)4.3 程序设计 (20)4.3.1系统初始化 (20)4.3.2中断子程序设计 (21)4.3.3 PWM调速程序设计 (22)4.3.4 串口通信程序设计 (23)5直流电机控制系统综合调试与分析 (25)5.1 硬件电路调试 (25)5.2 利用H-JTAG调试程序 (26)5.3系统联调结果与分析 (27)结论 (29)社会经济效益分析 (30)参考文献 (31)致谢 (32)附录ⅠS3C2440A芯片原理图 (33)附录Ⅱ程序清单 (34)1绪论随着我国经济的高速发展,微电子技术、计算机技术和自动控制技术也得到了迅速发展,直流电机调速技术已经进入一个崭新的时代。
毕业设计(论文)-基于arm的步进电机细分驱动控制设计[管理资料]
基于ARM的步进电机细分驱动控制设计引言随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
本控制系统的设计,由硬件设计和软件设计两部分组成。
其中,硬件设计主要包括ARM最小系统、控制模块、步进电机驱动模块、数码显示模块等功能模块的设计,以及硬件电路在电路板上的实现。
软件设计包括主程序以及各个模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并且将步进电机的转动速度动态显示在LED数码管上。
本系统具有智能性、实用性及可靠性的特点。
一、 ARM的简介;ARM(Advanced RISC Machines)处理器是Acorn计算机有限公司面向低预算市场设计的第一款RISC微处理器。
更早称作Acorn RISC Machine。
ARM处理器本身是32位设计,但也配备16位指令集。
一般来讲比等价32位代码节省达35%,却能保留32位系统的所有优势。
ARM的Jazelle技术使Java加速得到比基于软件的Java虚拟机(JVM)高得多的性能,和同等的非Java加速核相比功耗降低80%。
CPU 功能上增加DSP指令集提供增强的16位和32位算术运算能力,提高了性能和灵活性。
ARM还提供两个前沿特性来辅助带深嵌入处理器的高集成SoC器件的调试,它们是嵌入式ICE-RT逻辑和嵌入式跟踪宏核(ETMS)系列。
:ARM处理器的三大特点是:耗电少功能强、16位/32位双指令集和合作伙伴众多。
1、体积小、低功耗、低成本、高性能;2、支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件;3、大量使用寄存器,指令执行速度更快;4、大多数数据操作都在寄存器中完成;5、寻址方式灵活简单,执行效率高;6、指令长度固定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
位 置 检 测 器 是 系 统 的 关 键 所 在 。控 制 器 必 须 实 时 捕 捉转子的位置信号, 由定时器的计数值计算出转子速 度, 以控制电机的换相和转速。系统采用光敏式转子位 置传感器检测转子的位置, 它由光电开关和转盘组成。 转 盘 固 定 在 转 子 轴 上 , 其 齿 、槽 分 布 与 转 子 相 同 ; 两 个 光 电 开 关 相 隔 75°, 分 别 固 定 在 电 机 的 定 子 极 中 心 线 左 右 两 侧 37.5°处 。 随 着 转 子 的 运 动 , 在 一 个 转 子 角 周 期 60° 内 , 两 个 光 电 开 关 将 产 生 为 15°相 位 差 、占 空 比 为 50% 的方波信号, 它组合成四种不同的状态, 分别代表电机 四 相 绕 组 不 同 的 参 考 位 置 。由 于 光 电 开 关 输 出 有 一 定 的 上升和下降沿, 其输出需通过门电路整形后才能被主控 制器捕捉采集。位置检测电路原理图如图 5 所示。
电源
控制 指令
滑模控制策略 PWM 输出
驱动
功率 变换器
SRM
A/D 转换
电流检测
(1) 集 成 了 ARM7TDMI_ARM Thumb 处 理 器 核 , 具 有 高 性 能 的 32 位 RISC 体 系 结 构 , 高 代 码 密 度 的 16 位 指 令 集 和 嵌 入 式 ICE ; 最 高 时 钟 频 率 33MHz。
IR2110 本 身 不 具 有 逻 辑 信 号 与 功 率 信 号 的 隔 离 功 能 , 因 而 需 要 在 输 入 控 制 信 号 和 IR2110 之 间 加 入 光 耦 隔离器件。由于控制信号开关频率较高, 要求光耦器件 有 良 好 的 跟 随 性 , 一 般 需 选 用 快 速 光 耦 , 如 TLP521 。
电 机 为 8/6 级 结 构 , 功 率 变 换 器 的 控 制 输 入 采 用 PWM 方 式 , 则 控 制 器 至 少 需 要 产 生 4 路 PWM 控 制 信 号 ; 主 控 制 器 AT91M55800A 片 内 集 成 6 通 道 16 位 定 时 / 计 数 器 ( 每 个 定 时 计 数 器 可 以 作 为 PWM, 便 于 控 制 电 机 ), 每 通 道 可 产 生 两 路 频 率 相 同 、占 空 比 不 同 的 PWM 控 制 信 号 , 因 而 可 采 用 其 中 的 四 路 专 用 于 电 机 PWM 控 制 。 1 . 3 电 流 、位 置 检 测 器
为产生换相信号, 可将两个光电开关产生的信号进 行 异 或 运 算 , 得 到 周 期 为 转 角 15°的 信 号 , 送 入 主 控 制 器的外部中断检测端口, 即可作为电机换相的信号。利 用信号的变化和分辨不同的信号组合就可以获得转子 速度以及位置信息。在光电开关的实际安装过程中, 人 为 地 将 两 个 光 电 开 关 之 间 的 角 度 增 加 2°~3°, 即 可 提 前 获得换相信号, 使系统够获得更多的运算处理时间, 提 高系统的性能。 1 . 4 键 盘 输 入 、液 晶 显 示
传 统 的 SRD 系 统 多 以 单 片 机 或 数 字 信 号 处 理 器 DSP 为 主 控 芯 片 。 由 于 单 片 机 系 统 响 应 速 度 慢 , 系 统 数 据的采集、处理速度和系统算法的复杂程度受到限制; 而 DSP 成 本 高 , 工 业 级 产 品 少 , 不 利 于 在 SRD 系 统 实 际 应 用 中 推 广 。 本 文 介 绍 的 系 统 是 以 Atmel 公 司 的 工 业 级 低 成 本 ARM7TDMI 产 品 AT91M55800A 为 主 控 芯 片 实 现 数 字 调 节 系 统 。 AT91M55800A 响 应 速 度 快 , 具 有 丰 富 的 I/O 口 和 片 上 资 源 , 能 产 生 多 路 脉 宽 调 制 PWM 输 出 , 使 系 统 硬 件 简 单 、调 整 方 便 ; 易 于 移 植 操 作 系 统 , 简 化 了 系 统软件开发难度, 提高了系统实时性能。 1 SRD 系统构成与 实现
电源
PS/ 2 接 口 控 制 器 液 晶 接 口
Timer 外
负 载
RS232
AT91M55800A
设 接
SPI
PWM 总线接口
口
捕获计数
位置检测
EEPROM SRAM Flash
主控制器
图 2 主控制器结构
图 1 系统结构图
1.2 功率变换器及其驱动
1.1 主控制器
ቤተ መጻሕፍቲ ባይዱ
SRM 功 率 变 换 器 设 计 的 两 个 关 键 问 题 是 : (1)SRM
为检测系统的相电流, 系统采用磁场平衡式霍尔电 流 传 感 器 (LME 模 块 )作 为 电 流 检 测 元 件 , 其 最 大 的 优 点
是测量精度高, 响应时间短, 并能实现电气隔离检测。 电流检测电路如图 4 所示。平衡式霍尔电流传感器
将各相电路的电流转换为电压输出, 经电压跟随其低通 滤 波 后 , 输 入 到 由 MAX125 构 成 的 四 路 同 步 采 样 ADC 单 元, 转换为数字信号后通过系统总线直接送入主控制器。
AT91M55800A 丰 富 的 片 内 外 资 源 和 较 高 的 性 价 比 特 别 适 于 作 开 关 磁 阻 电 动 机 控 制 系 统 的 微 控 制 器 。图 1 中 虚 线 框 内 的 部 分 即 为 AT91M55800A 构 成 的 开 关 磁 阻 电 机 调 速 系 统 主 控 制 器 的 主 要 功 能 。图 2 是 主 控 制 器 的 硬 件 结 构 。 主 控 制 器 完 成 SRD 系 统 的 所 有 控 制 调 节 算 法 , 包 括 电 流 、转 速 控 制 , 电 机 启 动 、换 相 等 全 部 由 软 件 控 制 , 控 制 器 直 接 输 出 PWM 控 制 信 号 , 经 MOSFET 驱 动 电路后控制功率变换器, 以使电机转速和相电流达到系 统 要 求 。同 时 , 主 控 制 器 还 提 供 丰 富 的 外 围 接 口 , 以 方 便 系统的应用与调试。
为增加系统的可操作性, 降低开发难度, 系统采用 PS/2 接 口 的 标 准 键 盘 作 为 输 入 设 备 , 设 计 一 个 微 处 理 器 按 照 PS/2 协 议 专 门 处 理 与 标 准 键 盘 通 信 , 并 将 键 值 以外部中断的方式传送给主控制器进行键值处理。
系 统 液 晶 显 示 采 用 微 科 思 博 公 司 生 产 的 VK72B 智 能 彩 色 液 晶 显 示 模 块 , 配 合 背 光 电 源 、对 比 度 调 整 电 路
嵌入式技术
定额的估算。 由 于 本 系 统 是 小 功 率 SRM 控 制 系 统 , 为 了 体 现 典 型
SRD 运 行 和 控 制 特 性 以 及 相 控 独 立 性 , 主 电 路 采 用 不 对 称 半 桥 电 路 。这 种 电 路 结 构 不 但 可 以 避 免 常 规 变 频 器 中 上 、下 桥 臂 直 通 的 故 障 隐 患 , 而 且 也 使 得 各 相 绕 组 在 电 气 上 保 持 独 立 , 控 制 策 略 相 对 简 单 。为 简 化 驱 动 电 路 , 降 低 系 统 成 本 , 主 开 关 器 件 采 用 功 率 MOS 场 效 应 管 MOS- FET。 MOSFET 是 一 种 单 极 型 的 电 压 控 制 器 件 , 具 有 驱 动 电 路 简 单 、开 关 速 度 快 、无 二 次 击 穿 问 题 、安 全 工 作 区 宽 等 优 点 。 系 统 控 制 的 SRM 为 750W, 额 定 电 压 24V, 采 用 蓄 电 池 供 电 , 因 此 MOSFET 的 VDS 至 少 为 30V, ID 至 少 为 32A。 为 保 留 一 定 余 度 , 系 统 选 用 IRF1010 , 其 导 通 电 阻小, 栅源电压和栅极电流远高于额定值, 完全可保证 系统正常运转。
图 3 是功率变换器中的主电路及驱动电路原理图。 其 中 以 IR2110 为 核 心 的 电 路 构 成 主 开 关 Q1 、Q2 的 驱 动 电 路 。 IR2110 是 大 功 率 MOSFET 和 IGBT 专 用 驱 动 集 成 电 路 。IR2110 内 部 应 用 自 举 技 术 实 现 同 一 集 成 电 路 可 同时输出同一桥臂上高压侧与低压侧的两个通道信号, 使其特别适合于串联方式连接的高压 N 沟道功率 MOSFET 或 IGBT 的 驱 动 。 本 系 统 所 设 计 的 不 对 称 半 桥 电 路 , 就 属 于 这 种 连 接 方 式 , 因 而 采 用 IR2110 作 为 驱 动 芯片非常合适。
关 键 词 : 开 关 磁 阻 电 动 机 滑 模 变 结 构 控 制 ARM AT91M55800A PWM
开 关 磁 阻 电 动 机 SRM 具 有 结 构 简 单 、调 速 范 围 宽 、 启动转矩大、效率高以及可方便实现四象限运行等优 点 。 开 关 磁 阻 电 动 机 调 速 系 统 SRD 集 开 关 磁 阻 电 动 机 SRM 与 现 代 电 力 电 子 技 术 、控 制 技 术 于 一 体 , 兼 有 异 步 电 动 机 变 频 调 速 系 统 和 直 流 电 动 机 调 速 系 统 的 优 点 [1]。 目 前 , 已 应 用 于 工 业 、家 电 、交 通 、纺 织 、航 天 等 领 域 。
(2)8KB 片 内 SRAM, 32 位 数 据 总 线 宽 度 , 单 时 钟 周 期 访 问 , 完 全 可 编 程 的 外 部 总 线 接 口 , 系 统 最 大 可 扩 展 64MB 存储器, 可在单一存储器上建立操作系统和应用程序。