7连续时间LTI系统响应求解举例
信号与系统-连续时间LTI系统的稳定性_图文

劳斯(Rooth)判据 霍尔维茨(Horwitz)判据 简单详细介绍这两个判据,然后介绍由这两个判据得到的适用3阶或3阶 以下系统稳定的简化的判别方法。
霍尔维茨(Hurwitz)判断法
考虑因果系统的稳定性。
连续时间LTI系统为因果系统的充要条件为
连续时间、因果LTI系统稳定的充要条件是冲激响应绝对可积,即
二.系统稳定性的判断
由系统函数判断连续时间、因果LTI系统系统稳定性 H(s) 的假分式时,不稳定。
H(s) 的真分式,有可能稳定。 由系统函数的极点分布可以判断连续时间、因果LTI系统系统稳定性
(1)当 H(s) 的所有极点全部位于平面的左半平面,不在虚轴上,则系统
是稳定的。
(2)当H(s)在平面虚轴上有一阶极点,其余所有极点全部位于
平面的左半平面,则系统是临界稳定的。
(3)当H(s)含有右半平面的极点或虚轴上有二阶或二阶以上
的极点时,系统是不稳定的。
二.系统稳定性的判断
当系统的参数都是给定具体数值时,当然可以应用上面讨论的方法,计算 出系统函数的每一个极点,然后根据极点位置来判断系统是否稳定 。
(2)阵列中首列元素有变号时,则含有 右半平面根,右半平面根的个数 为变号次数,则系统为不稳定系统。
通常联合使用罗斯—霍尔维茨准则:(简化判别过程)
(1)使用霍尔维茨准则剔除不稳定的系统。 (2)满足霍尔维茨准则的,还不能确定系统的稳定的性。可以罗斯准则最终确
定其稳定性。
【例5-7-6】已知某因果系统的系统函数为 为使系统稳定, 应该满足什么条件?
LTI连续时间系统零状态响应的求解方法

LTI连续时间系统零状态响应的求解方法张楠;李庆华;孙明灿【摘要】目前国内很多“信号与系统”的教材中讨论了LTI连续时间系统零状态响应的一些求解方法,本文根据现有的信号与系统教材中连续时间系统零状态响应的求解方法,分别从利用冲激响应与激励的卷积、微分方程和变换域三方面求解零状态响应,并给出了实例说明了其正确性。
【期刊名称】《齐鲁工业大学学报:自然科学版》【年(卷),期】2014(028)004【总页数】3页(P27-29)【关键词】零状态响应;卷积;连续系统【作者】张楠;李庆华;孙明灿【作者单位】齐鲁工业大学电气工程与自动化学院,山东济南250353;;;【正文语种】中文【中图分类】TP391.9求解线性时不变连续时间系统零状态响应是信号与系统课程中重要的知识点之一。
零状态响应的概念是初始状态为零,完全由激励产生的响应为零状态响应。
目前国内的一些从事信号与系统教学的教育工作者,也总结了一些求解方法[1-5]。
本人根据自己的教学经验,从卷积、微分方程求解和变换域出发,来讨论连续时间系统零状态解的一般方法,并给出实例证明其有效性。
1 求解方法设线性时不变连续时间系统方程如式(1)所示:yn(t)+a1yn-1(t)+…+any(t)=b0fm(t)+b1fm-1(t)+…+bmf(t)(1)式中f(t)是系统的激励信号,响应为y(t),根据零状态响应的定义,可知求零状态响应时,系统初始条件为1.1 利用冲激响应求解的方法通过系统先求出冲激响应,利用冲激响应与激励的卷积得出yzs(t)=h(t)*f(t),该方法重要的是需要先求出系统的冲激响应。
1.2 微分方程求解的方法用微分方程求解零状态响应时需要利用初始条件该方法需要利用函数的匹配,判断初始条件的跳变情况,从而得出据此得出零状态响应的系数。
1.3 变换域方法通过拉普拉斯变换,根据拉普拉斯变换和反变换,求出零状态响应。
该方法要求掌握拉普拉斯反变换的方法。
实验四-连续时间LTI系统的时域分析

电子信息工程系实验报告课程名称:信号与系统实验项目名称:连续时间LTI 系统的时域分析 实验时间:2013-12-6班级: 姓名: 学号:一、实 验 目 的:1、学会运用MATLAB 符号求解连续系统的零输入响应和零状态响应;2、学会运用MATLAB 数值求解连续系统的零状态响应;3、学会运用MATLAB 求解连续系统的冲激响应和阶跃响应;4、思考运用MATLAB 卷积积分法求解系统的零状态响应。
二、实 验 环 境:1、Windows 72、MATLAB 7.1三、实 验 原 理:3.1、 连续时间系统零输入响应和零状态响应的符号求解LTI 连续系统可用线性常系数微分方程来描述,即:()()00()()N Mi j ij i j a y t b f t ===∑∑ 其中,(0,1,,)i a i N =L 和(0,1,,)i b i M =L 为实常数。
该系统的完全响应由零输入响应()zi y t 和零状态响应()zs y t 两部分组成。
MATLAB 符号工具箱提供了dsolve 函数,可实现常系数微分方程的符号求解,其调用格式为:dsolve('eq1,eq2,…','cond1,cond2,…','v')其中,参数eq1,eq2…表示各微分方程,它与MATLAB 符号表达式的输入基本相同,微分或导数的输入是用Dy,D2y,D3y,…来分别表示y 的一阶导数,y 的二阶导数,y 的三阶导数…;参数cond1,cond2,…表示个初始条件或起始条件;参数v 表示自变量,默认为变量t 。
可利用dsolve 函数来求解系统微分方程的零输入响应和零状态响应,进而求出完全响应。
3.2、 连续时间系统零状态响应的数值求解前面叙述了符号求解系统微分方程的方法,实际工程中用得较多的方法是数值求解微分方程。
下面主要讨论零状态响应的求解。
而零输入响应的数值求解可通过函数initial 来实现,initial 函数中的参量必须是状态变量所描述的系统模型,此处不做说明讲解。
§2-1 LTI系统的零状态响应
1 2
x(τ)
1 −1 0 1
τ
τ2 t2 1 当1<t<2 y (t ) = ∫ (t − τ + 1)dτ = (tτ − + τ) t −1 = 2 − 2 2 t −1
∞
h(t − τ)
1
t − 10 t
1
t +1
τ
当t>2
y (t ) =
−∞
∫ x(τ)h(t − τ)dτ = 0
h(t − τ)
−∞
u (t − τ ) d τ
1
0
1
u (−τ)
以上积分式的积分的上下限为(1~t),积 分结果的定义区间为(1~∞),所以后面要乘 分结果的定义区间为(1~ (1~∞ 以u(t-1)。
t t
1
0
t =0
τ
u (t − τ)
1 t <1 0 t
y 2 (t ) = − ∫ e − ( t − τ ) d τ = − e − t ∫ e τ d τ
大连海事大学信息科学技术学院
《信号与系统》 信号与系统》
∞ ∞
第二章
LTI系统的时域分析 LTI系统的时域分析
y (t ) =
=
−∞ ∞
∫ x ( τ ) h (t − τ ) d τ =
−(t − τ)
−∞
u ( τ ) e − ( t − τ ) u (t − τ ) d τ ∫
u (τ)
1
0
x (t ) = u (t )
,
h (t ) = e − t u (t )
求系统的零状态响应 解:
y (t ) = x (t ) ∗ h (t )
4连续时间LTI系统的冲激响应

则连续时间LTI系统的冲激响应h(t)应满足
h ( n ) ( t ) an 1h ( n 1) ( t ) a1h ' ( t ) a0h( t ) bmd ( m ) (t ) bm 1d ( m 1) (t ) b1d '( t ) b0d ( t )
解得A= -1, B =1
h(t ) e3 t u(t ) d (t ) 可见冲激响应的形式要根据微分方程情况设定
2. 冲激响应的求解
连续时间LTI系统的冲激响应h(t)满足微分方程
h ( n ) (t ) an 1h ( n 1) (t ) a1h ' (t ) a0h(t ) bmd ( m ) (t ) bm 1d ( m 1) (t ) b1d '(t ) b0d (t )
若描述连续时间LTI系统的常系数线性微分方程为
y ( n ) (t ) an 1 y ( n 1) (t ) a1 y '(t ) a0 y (t ) bm x ( m ) (t ) bm1 x ( m1) (t ) b1 x ' (t ) b0 x (t )
Ad (t ) 2d (t ) d '(t )
方程两端无法平衡!
若使其平衡, h(t)需要加上u(t)的导数项,即d(t)
h(t ) Ae3 t u(t ) Bd (t )
若 y '(t ) 3 y(t ) 2 x(t ) x '(t ) , t 0 则冲激响应有何变化?
使方程两边同类项平衡,求出待定系数,得到h(t)。 这种方法称为冲激平衡法
[例] 描述某线性时不变系统的微分方程为
实验一lti连续系统时域响应测试与分析
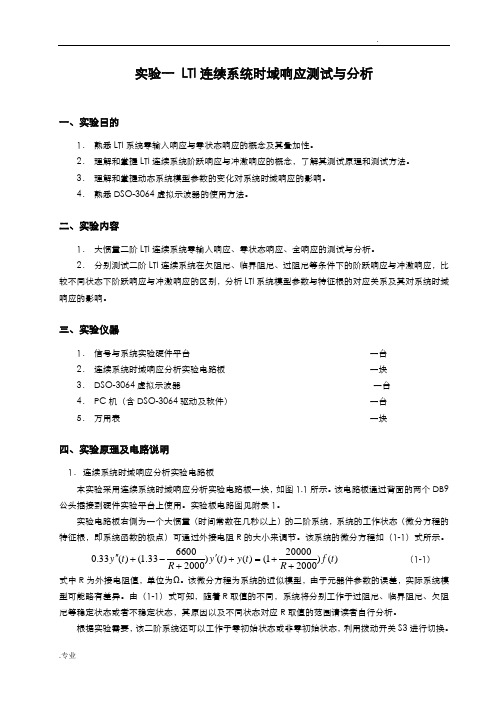
实验一 LTI 连续系统时域响应测试与分析一、实验目的1. 熟悉LTI 系统零输入响应与零状态响应的概念及其叠加性。
2. 理解和掌握LTI 连续系统阶跃响应与冲激响应的概念,了解其测试原理和测试方法。
3. 理解和掌握动态系统模型参数的变化对系统时域响应的影响。
4. 熟悉DSO-3064虚拟示波器的使用方法。
二、实验内容1. 大惯量二阶LTI 连续系统零输入响应、零状态响应、全响应的测试与分析。
2. 分别测试二阶LTI 连续系统在欠阻尼、临界阻尼、过阻尼等条件下的阶跃响应与冲激响应,比较不同状态下阶跃响应与冲激响应的区别,分析LTI 系统模型参数与特征根的对应关系及其对系统时域响应的影响。
三、实验仪器1. 信号与系统实验硬件平台 一台2. 连续系统时域响应分析实验电路板 一块3. DSO-3064虚拟示波器 一台4. PC 机(含DSO-3064驱动及软件)一台 5. 万用表 一块四、实验原理及电路说明1. 连续系统时域响应分析实验电路板本实验采用连续系统时域响应分析实验电路板一块,如图1.1所示。
该电路板通过背面的两个DB9公头插接到硬件实验平台上使用。
实验板电路图见附录1。
实验电路板右侧为一个大惯量(时间常数在几秒以上)的二阶系统,系统的工作状态(微分方程的特征根,即系统函数的极点)可通过外接电阻R 的大小来调节。
该系统的微分方程如(1-1)式所示。
)()2000200001()()()2000660033.1()(33.0t f R t y t y R t y ++=+'+-+'' (1-1)式中R 为外接电阻值,单位为Ω。
该微分方程为系统的近似模型,由于元器件参数的误差,实际系统模型可能略有差异。
由(1-1)式可知,随着R 取值的不同,系统将分别工作于过阻尼、临界阻尼、欠阻尼等稳定状态或者不稳定状态,其原因以及不同状态对应R 取值的范围请读者自行分析。
根据实验需要,该二阶系统还可以工作于零初始状态或非零初始状态,利用拨动开关S3进行切换。
连续时间LTI系统零输入响应的探讨
中图 分 类 号 : N9 16 T 1. 文献标识码 : A 文 章 编 号 :0 80 8 (0 8 0—0 00 10 —6 6 2 0 ) 50 2 —4
Di c s i n o r - n tRe po e o ntn o - m e LTI S s e s s u so n Ze o I pu s ns fCo i u usTi y tm
第3 0卷第 5期 Nhomakorabea20 0 8年 1 0月
电气 电子教学学报 J OURNAL EEE OF
Vo O No 5 L3 . 0c. 0 8 t2 0
连 续 时 间 L I系统 零 输入 响应 的探 讨 T
胡 健, 陈后金 , 薛 健 , 郝晓莉 , 满义 , 钱 高海林
t x b o sa er ve d o h a i o e c ig e p re c . I sp o o e h tz r - p tr s o s eae e t o k r e iwe n t eb ss fta h n x e in e ti r p s d t a e o i u e p n er lt s n
t y tm' iiil t t sY ( ’ n ( o s se s n ta a u ‘ O )a dz‘ O )wh n dfe e ta q ain c n an n u sd r aieo is s ’ e i rn ile u to o t i si p f e i t ff t f v v r
LTI系统的时域频率复频域分析
a2y''(t)a 1y'(t)a0y(t)b 2x''(t)b 1x'(t)b 0x(t), a2,a 1,a0,b 2,b 1,b 0为常数
5
(2)线性常系数差分方程
(Linear Constant-Coefficient Difference Equation ,LCCDE)
一般的线性常系数差分方程可表示为:
2
2
频域分析法:也是建立在线性系统具有叠加性、齐次性基础 上,与时域分析法不同处在于信号分解的基本函数不同。 17
由于h ( t ) 的傅氏变换 H ( j ) 就是频率为 的复指
数信号 e j t 通过LTI系统时,系统对输入信号在幅
度上产生的影响,所以称为系统的频率响应。
鉴于h ( t ) 与 H ( j ) 是一一对应的,因而LTI系统 可以由其频率响应完全表征。
6
(3)线性常系数差分方程的时域递归解法
对于差分方程,可以将其改写为:
y[n]a 1 0 kM 0bkx[nk]kN 1aky[nk]
可以看出:要求出y[0],不仅要知道所有x[n] (-M≤n ≤0 ),还要知 道y[-1]、y[-2]、…、y[-N],这称为一组初始条件。对于因果LTI系 统,若当n<0时,x[n]=0,则有y[-1]、y[-2]… y[-N]都为0,于是可 以求得y[0]=b0x[0]/a0。进一步,又可以通过y[0]和x[0]、x[1]求得 y[1],依次类推可求出所有y[n]。
右端加法器的输出:
y(t) 2f'(t)4f(t) (2)
由(2)可得y’(t),y’’(t)为:
;(t)2f''(t)4f'(t) (3) y''(t)2f'''(t)4f''(t) (4)
实验4 连续时间LTI系统的时域分析
b [ b0b1 bm ]
– initial(A,B,C,D,y(0-),t):求系统的零输入响应
• lsim的调用形式:
a [ a0a1 an ]
– 求系统的零状态响应
• lsim(sys,X,t)
• lsim(b,a,X,t) • lsim(A,B,C,D,X,t)
– 求系统的全响应
• lsim(A,B,C,D,X,t,y(0-))
4、已知系统的微分方程,求单位冲激响应和单位阶 跃响应
(1) y(t) 3y(t) 2y(t) f (t)
(2) y(t) 2y(t) 2y(t) f (t)
实验内容:
1、已知系统的微分方程和激励信号,求零状态响应 (用符号法,数值法,卷积积分法)
(1) y(t) 4y(t) 3y(t) f (t), f (t) u(t)
(2) y(t) 4 y(t) 4 y(t) f (t) 3 f (t), f (t) etu(t)
2、已知系统的微分方程和激励信号,初始值,求零 输入、零状态和全响应(用符号法,数值法)
y(0 ) 1, y(0 ) 2
手动求解:
yzi (t) 4et 3e2t (零输入响应) yzs (t) (et e2t )u(t)(零状态响应) y(t) 4et 3e2t (et e2t )u(t)(全响应)
零输入响应
1
0.5
0
0
1
2
3
4
5
6
7
8
t
零状态响应
0.2
0.1
实验原理:
LTI连续系统可用线性常系数微分方程来描述
N
M
air(i) (t) bje( j) (t)
信号与系统 高等教育何子述版 课后习题答案
-2
-1
0
t
4 3
习 题 一
2g(-t) 2 2 1 1 0 1 2 3 t 0 1 2 3 t
信 号 与 系 统
f(t) 2 1
f)
g(t) 2 1
0
1
2
3
t
-2
-1
0
t
习 题 一
g(2t-2) 1
f(t)g(2t-2) 1
0
1
t
信 号 与 系 统
1.13 已知离散时间信号 f [n] ,如图p1.13所示,画 出信号的奇部 f o [n]和偶部 f e [n]的波形。
习 题 二
y 可见: h (t ) y p (t ) ys (t ) y f (t )
信 号 与 系 统
2.13 已知LTI连续时间系统输入信号 f (t ) 和冲激响 应 h(t ) 如下,求系统响应 y (t ) ,画出响应波形示意 图。
a)
b)
f (t ) g (t ),
2
f ' (t )
习 题 一
1
-1
0
1
2
3
4
5
t
信 号 与 系 统
f ' (t ) 2u (t 1) 2u (t ) u (t 2) u (t 5) (t 5)
f '' (t ) 2 (t 1) 2 (t ) (t 2) (t 5) ' (t 5)
即0 t 时
/ 2
1
g (t )
/2
当 / 2 /2 t / 2
/2
/ 2t