基于DSP和LabVIEW的电动机转子断条故障诊断
发电机转子部件松动故障诊断及处理
发电机转子部件松动故障诊断及处理摘要:随着我国经济在快速发展,社会在不断进步,某厂4#汽轮发电机9#轴承轴向振动大,现场检查无异常,对发电机转子做好在线动平衡后,开机振动依旧大,取下所加平衡块再开机振动恢复正常,之后多次发生此类现象。
经过详细诊断分析,原因归结于发电机转子部件松动,将发电机转子送制造厂,对绝缘垫块进行了部分更换与固定处理,并做了转子高速动平衡,安装投运后机组运行正常。
关键词:发电机转子;部件松动;诊断;处理引言随着当代技术的迅速发展,发电机成为我们日常的生活中非常重要的角色,是电力系统中不可缺少的设备组成之一。
发电机长期运行产生的转子绝缘损坏老化或工作人员在工作中造成异物掉落等原因有可能造成发电机转子一点甚至多点接地,或者转子匝间短路,从而对发电机的正常运行造成严重的影响。
因此,我们一般通过对其转子进行相应的试验检测,通过试验数据波形等参数进行一定的分析。
包括与出厂数据、往年记载的数据进行对比,查找到引起转子异常因素等,为有效地开展检修工作提供了重要保障。
文章就发电机转子异常进行了一定的深入分析与探讨。
1测量发电机转子异常的新领域发电机圆柱转子励磁绕组的匝间短路会造成转子震动问题,这是由故障绕组中流过的不对称直流和功率损耗使转子发热弯曲造成的,匝间短路造成的气隙中的磁通行不平衡同样会加剧震动问题,通过震动的迹象来分析是否存在匝间短路往往不是很准确,还要配合前面介绍的众多试验手法联合判断是否存在故障。
随着技术不断地革新发展,通过一种脉冲示波器发出一系列的阶跃低压脉冲,从两个终端引入转子绕组,产生的反射信号在双通道示波器上接收到两个独立的波形,其中一条波形发转后与另一条波形叠加形成单独的波形。
如果在绕组中没有缺陷出现,两个波形将几乎是相同的;如果翻转其中的一个波形与另一条叠加可以得到一条近乎水平的直线,在直线的端部会有一个微小的尖瓣脉冲和一个几乎难以发现的起伏。
任何由于故障产生的明显的缺陷,会在合成波形上显示不规则,通过估算屏幕上异常出现的位置可以推断出故障所在的大致位置,在波形起始位置出现的大的不规则,是靠近绕组两端中任何一端的故障所导致的,更加直观有效的判定。
转机械转子不平衡故障诊断与处理

转机械转子不平衡故障诊断与处理大家好,今天咱们聊聊那个让人头疼的机械问题——转子不平衡。
你听说过“机器不听话”吗?没错,说的就是转子不平衡了。
就像人生病了要吃药一样,机器出了问题也得找原因,然后对症下药。
别急,我来给你说说怎么诊断和处理这个小毛病。
你得摸摸耳朵听听声音。
转子不平衡时,机器里那玩意儿“嗡嗡”直响,像是在抗议,告诉你它不舒服。
这时候,你得用听诊器仔细听听,是不是有节奏的声音?要是有,那就得查查了。
咱们得动动手,摸摸转子。
用手指轻轻转一转,感受一下它的震动。
如果感觉不对劲,那可能就是转子不平衡了。
这时候,你可得小心点,别让自己也受伤了。
然后,咱们得看看转子有没有变形。
找个放大镜或者手电筒,照一照转子表面,看看有没有什么异常。
如果有,那可能就得换个新转子了。
别忘了检查一下润滑系统。
转子不平衡可能会让轴承发热,影响润滑效果。
所以,检查的时候别忘了看看轴承是不是热乎乎的。
现在你知道该怎么处理了吧?别急,让我来给你细说一下。
你得把设备停下来,找个安全的地方。
然后,按照说明书上的指示,拆开转子,检查一下轴承和转子本身。
要是发现问题,赶紧修或者换。
要是没发现问题,那就继续用吧。
但是,别高兴得太早。
转子不平衡可能是个大问题,需要更专业的设备和技术来解决。
这时候,你就得请个专家来帮忙了。
记得定期给设备做个“体检”。
这样,一旦发现问题,就能及时发现,避免更大的损失。
关于转子不平衡的问题,今天就聊到这里。
你要是遇到类似的问题,不妨试试我的方法,说不定能帮你轻松解决问题呢!记得关注我哦,下次再见!。
一种感应电机转子断条早期故障诊断方法

一种感应电机转子断条早期故障诊断方法吴立泉; 刘永强; 梁兆文【期刊名称】《《电机与控制应用》》【年(卷),期】2019(046)009【总页数】10页(P101-110)【关键词】感应电机; 故障诊断; 转子断条; 参数辨识; 滑窗【作者】吴立泉; 刘永强; 梁兆文【作者单位】华南理工大学电力学院广东广州 510000【正文语种】中文【中图分类】TM3460 引言感应电机具有结构简单、价格低廉等优点,广泛应用于工业领域。
对于连续工艺流程部门,一旦感应电机发生故障,造成的经济损失往往会超出驱动电机本身的价值。
统计表明,在感应电机的四大类故障中,转子故障占10%,因此感应电机转子故障诊断是不可忽略的一部分。
国内外对感应电机转子故障已经进行了大量研究。
在国内,转子故障诊断方法分为3类:(1)基于信息处理的方法;(2)基于知识的方法;(3)基于解析模型的方法。
文献[1-3]用瞬时功率频谱分析对电机转子故障进行诊断。
文献[4-5]用Park矢量法来检测电机转子故障,但在故障早期存在椭圆率度量难等问题。
文献[6]利用定子电流作Park变换后的频谱特征来诊断转子故障。
文献[7]在去除定子电流信号基波信息的基础上,提出了基于互相关函数(CCF)的CCF-HTLS算法,旨在抑制定子电流中可能出现的高斯噪声产生的影响。
针对传统快速傅里叶变换(FFT)只考虑频谱低频段的特征,文献[8]对定子电流进行倍频小波分析,同时考虑频谱的低频段和高频段特征。
文献[9-12]利用数据融合方法诊断感应电机故障,以期解决依靠单一信息进行电机诊断结果的不足。
文献[13]基于电机振动故障信号,利用遗传小波神经网络进行电机故障诊断。
文献[14-15]引入鼠笼断条的空间位置角和断条率来建立dq0坐标系下的故障模型,通过参数估计的方法来对电机定转子故障进行诊断,但存在故障早期特征不明显的问题。
上述方法对感应电机转子断条早期故障的识别准确率不高,就常用的定子电流特征分析法而言,发生转子断条时,定子电流中会出现基频周围的边频带,特征频率是fb,fb=(1±2ks)f1,s为转差率,f1为电网频率。
基于LabVIEW的倒频谱与包络谱分析在风电机组齿轮箱故障诊断中的应用
( 1 )
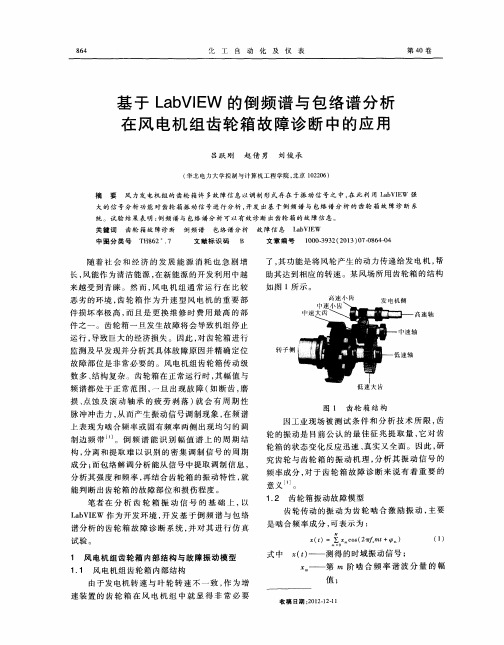
1 风 电机 组齿轮 箱 内部结构 与故 障振动模 型 1 . 1 风 电机组 齿轮箱 内部 结构 由于发 电机转 速 与 叶 轮转 速 不 一 致 , 作 为增 速 装置 的 齿 轮 箱 在 风 电机 组 中就 显 得 非 常 必 要
式中 ( t ) —— 测 得 的时域振 动信号 ;
齿 轮 的啮合 频 率 ;
—
平 均计 算 的结 果 , 受 载荷 影 响 小且 计 算 值 相 对稳
定, 有效 排除 了载荷 波 动对故 障判 别 的干扰 。
2 . 2 H i l b e r t 解 包络 原理
—
第 m 阶 啮 合 频 率 谐 波 分 量 的 相
位。
齿轮 存 在分布 缺 陷或损 伤 时振动 信号 发生 变
损、 点蚀及 滚 动 轴承 的疲 劳 剥 落 ) 就会 有周 期 性
低 速 大 齿
脉 冲 冲击 力 , 从 而产生 振动信 号调制 现象 , 在频 谱
上表 现 为啮合频 率或 固有频率 两侧 出现均 匀 的调 制 边频 带 … 。倒 频 谱 能识 别 幅值 谱 上 的 周 期 结
构, 分 离和提 取难 以识别 的密 集调 制 信 号 的周 期
图1 齿 轮 箱 结 构
因工业现 场被 测 试 条件 和 分 析技 术 所 限 , 齿
轮 的振动是 目前 公 认 的最 佳 征 兆提 取 量 , 它 对齿
轮箱 的状态 变化反 应迅速 、 真实 又全 面 。因此 , 研
成分; 而包络解 调分析 能从信 号 中提取调 制信 息 ,
分 析其 强度和 频率 , 再 结合齿 轮箱 的振 动特性 , 就
究齿 轮与齿 轮 箱 的振 动机 理 , 分 析 其振 动 信 号 的
基于LabVIEW和RMS幅值谱的齿轮故障诊断

参考文献: [1] 徐艳华, 倪雁冰, 杨志永.基于虚拟仪器的机械振动测量技术[J].组
合机床和自动化加工技术, 2003. [2] 杨 乐 平 , 李 海 涛 , 赵 勇.LabVIEW 高 级 程 序 设 计[M].北 京 : 清 华 大
学出版社, 2003. [3] 徐章遂, 房立清, 王希武.故障信息诊断原理及应用[M].北京: 国防
“13”后 回 车 , 命 令 行 提 示 “Enter size of mesh in N direction: ”, 输 入 “25”后 再 回车, ( 即 13×25 的网格矩 阵) , 然后在命令行中粘贴 剪 贴 板 中 的 数 据 , Auto- CAD 依次输入全部节点坐 标值, 结束后就得到了帽 形曲面, 如图 2 所示。
m, n—主、从动齿轮转动频率的各阶谐频的序数。
由上可知, 齿轮的振动频谱图的谱线一般有: 齿轮的
转动频率及其低阶谐频、齿轮的啮合频率及其倍频、啮
合频率的边频带和齿轮幅的各阶固有频率等。其中, 齿
轮副的固有频率是由于齿轮啮合时齿间撞击而引起的齿
轮自由衰减振动, 它们位于高频区且振幅较小, 易被噪
声信号淹没。
图 3 更精确的绘制曲面 Fig.3 Sur face dr awn mor e
accur ately
2 曲面绘制精度的选择与控制
自变量 r 和 t 的取值范围决定了曲面的大小, 而 它们的增量的大小则控制了曲面的拟合精度。增量越 小, 经线和纬线的数量就越多, 网格矩阵点的数量也 越多, 每个小缀面就越小, 拟合生成的帽形曲面就越 光 滑 , 但 在 Excel 和 AutoCAD 中 的 计 算 量 也 越 大 。 图 3 为 r 和 t 的 增 量 分 别 为 0.1 和 5°时 在 AutoCAD 中 绘 制的曲面。
鼠笼转子断条的测定及诊断

2020年第3期梅"科技・47・探讨§鼠笼转子断条的测定及诊断王维1冷祥洪2尹春娇1(1.梅山钢铁公司设备分公司2.梅山钢铁公司设备部南京210039)于三 步电动机来说,鼠笼故障(统计,故故的10%)。
笼裂后继续使用会使断裂笼条周边笼条的应力增大,故大,电机烧坏。
严重时,由于膛而擦伤铁芯,机报废。
因此,在故生的早期,把故障检安全生产具有重。
1鼠笼转子断条静态检测技术1.1基本原理电感测量数据与转子位置有关。
将一周细12(18#24#36)等,,每个位别每两相()电感量3,利用Excel绘制图形。
电感波形应为三相电压的同步波形,正弦波,生畸变,则表故障。
1.2实操选鼠笼高压电机与铸铝导条鼠笼转子低压电机分别开。
1.2.1针对铜导条鼠笼转子高压电机试验选取2鼠笼高压电机进行对比,参数1。
表1铜导条鼠笼转子高压电机断条研究序号号电压/V率/kW状况1YKK450-410000355良好2Y450-86000355人为锯断2根相邻导条1.2.1.1试验操作过程1)设计一种“轴头磁吸”用于计量(底及刻度针用黑色橡胶磁片,刻5。
为,沿周360°均布)o较于传统用记号笔在轴头上刻,使用“轴磁吸式分度盘”,劳动效率及计量精大幅提升。
2)将“轴磁吸”吸附轴端面,差(本证试选择的差为20。
),用TH2822E手持LCR量电感,见图1°图1铜导条鼠笼转子高压电机电感测量3)将测量数ExceB,而利用Excel具备的“带数忆的图”转换能,将数据绘形图。
试验对象1(YKK450-4,10000V,355kW),电感测量数据见表2,形图见图2;2(Y450-8,6000V,355kW),感测量数3,形图图3o表2YKK450-4,355kW,10000V量数据角度3/mH角度3/mHAB AC BC AB AC BC 0303.3305.9315.8180301.0305.9314.5 20312.6299.9310.1200312.5299.5310.2 40314.3304.7302.7220313.6304.7301.5 60306.6314.8301.3240306.7315.4301.0 80300.6312.6311.7260299.8310.4307.9 100305.5301.8314.3280304.2301.6313.2 120314.1301.1305.7300313.5301.1304.6 140311.5312.8299.9320309.6311.9299.1 160301.6314.2305.4340301.5314.8307.3 1.2.1.2试验结论1(状态完好)三相电感绘波形近似为正弦波;2(人・48・梅"科技2020年第3期为断开2根笼)三电感随转子角度变换测绘波形发生较严重畸变。
基于“能量—故障”诊断模式的转子断条故障在线监测

.
n xeo ercg&in w y hefs n l emo i r g a d dan s a to o oo rk n b rfutcl b l. x t ft e o r o a ,t ato — n nti n ig oi r h d frrt boe a al al e i e h i on s e r mp
V 4N d 3 o3
M 2 2 ∞
文 章 编 号 :093 8 (02 0—040 10 . 720 )308 -4 0
基 于“ 量一 故 障" 断模 式 的转 子 断条 故 障在 线监 测 能 诊
孙克金 , 念 , 刘 谢 驰, 何 坤
( 四川大学 电气信息学 院. 四川 成都 606 ) 105
r ne . ae td
Ke wo d : trbo e a a l ̄ a e t ̄ y r s r o rk n b rfutw v l o : e
oi¥ te “ n ry—fu ” dan s rl; / h eeg a l i g oi t smo e egn etr nxerc gi o d ; i v ca ;x l e ont n c i
小 波 变换 ( aee t nf m) w vl as r 是近 年来 在 傅 立 叶 tr o
在转 子断条故 障初 期 , 障信号 较弱 , 子 电流 故 定 中 的转予 断条故 障特 征分 量 ( 1±2 )o sf 与基 频分 量 , 相差邛 大( 中,为 电机的转差率 , 为电网的基 o : 其 s , o
鼠笼转子断条故障的判断及检修

鼠笼转子断条故障的判断及检修小型电机多是采用铸铝转子,大中型电机多采用铜条转子。
鼠笼转子断条及断环,总称为断笼或断条。
断条是指鼠笼中有一根或数根断裂或有严重气泡,而断环则是指端环中有一处或几处开裂。
通常鼠笼转子比较坚固结实,不易损坏,但当铸铝或铸铜鼠笼转子制造工艺粗糙、质量不良或设计不合理,频繁启动及操作不当时,急促、猛烈的正反转将造成剧烈的冲击,导致鼠笼发生断条故障。
鼠笼式电机若转子只断条一或两根,对电机运行暂无明显影响,而断条严重则影响电机正常运行。
电机鼠笼转子断条严重时,将出现下列现象。
1.电机启动转矩明显降低,停车后再次启动时,电机剧烈震动,启动困难,开启式电机会从通风道内溅出火星等。
2.电机运行时,电流表指针明显做周期性摆动,高速电机指针抖动。
3.带载时转速明显降低,转子过热,机身剧烈震动,温度增高,并有较大周期性嗡嗡声。
鼠笼转子发生断条故障时,通常采用以下方法进地检查。
1.外观检查铸铝鼠笼转子的断裂点多发生在槽轴向长度的中心附近,而铜条转子的断裂点则多发生在笼条与端环焊接处,若系双笼转子其故障点多是出在上笼部位。
此时,取出鼠笼转子,检查铁芯表面,笼条与端环交接处若有变色或过热及裂纹,即表明该处断条。
2.更换转子检查更换转子检查虽简单易行,但需更换上同型号良好转子进行试运转。
如果更换转子后,电机运行一切恢复正常,则说明原鼠笼转子存在断条故障。
3.通电检查在定子绕组中通入约为额定电压10%的低压电流,在一相中串入电流表,用手慢慢地转动转子,此时电流表的读数若不稳定,大小循环变动,即表明转子有断条故障。
4.铁粉检查鼠笼转子两端加低压大电流,调节调压器,使电压从零逐渐升高,待升流器的电流逐渐增大时,转子表面即产生磁场,随后把铁粉撒在转子上。
若铁粉一行行地沿着笼条方向整齐排列,表明转子完好无损。
如果铁粉排列杂乱无章,或铁粉撒不上去,说明转子存在断条故障。
5.整机检查在定子三相绕组中通入50~60V的低压电,以转子不能自转为准,之后用手缓慢转动转子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012往 第5期 仪表技术与传感器
Instrument Technique and Sensor 20l2
No.5
基于DSP和LabVIEW的电动机转子断条故障诊断 王新,赵志科 (河南理工大学电气工程与自动化学院,河南焦作454003)
摘要:为了实现对鼠笼式异步电动机转子断条故障的实时诊断,设计了一套以TMS320F2812和LabVIEW为核心的转 子断条故障诊断装置。该装置以TMS320F2812为主控芯片,实现对异步电动机定子侧电流信号的采集,通过DSP的串口 模块将采集到的信号传送到由LabVIEW构建的上位机信号处理平台。针对定子侧电流信号中工频分量对断条故障特征 分量的干扰较大,严重地影响断条分量的识别,LabVIEW处理平台采用自适应陷波器算法对工频信号进行陷波处理,在 FFT频谱上实现对断条故障特征分量的识别。实验证明,该装置能够实现对断条故障进行实时监测,并能够在FFr频谱 上对断条故障特征分量进行识别。 关键词:DSP;LabVIEW;转子断条;自适应陷波器 中图分类号:TP206 文献标识码:A 文章编号:1002—1841(2012)05—0024—03
Rotor Broken-bar Fault Diagnosis of Induction Motor Based on DSP and LabVIEW
WANG Xin,ZHAO Zhi—ke (School of Electrical Engineering and Automation,Henan Polytechnic University,Jiaozuo 454003,China)
Abstract:In order tO achieve the fault diagnosis of the broken rotor bar of the squirrel-cage induction motor in real—time,This paper designed the fault diagnosis system of the broken rotor based on DSP and LabVIEW.The fault diagnosis system was designed for the stator current signal acquisition by using the TMS320F28 12 as the controller.The signal can be transmitted to the signal pro— cessing platform of LabVIEW by serial communications module.For the interferences from the power ̄equency component to the rotor broken—bar fault feature component of the stator current signal,that seriously affect the indentification of the rotor broken—bar component.The signal processing platform of LabVlEW adopted adaptive notch filter algorithm to counteract interference of the power ̄equency.SO that can achieve the recognition of the rotor broken—bar fault characteristic component in the FFr spectrum. This equipment Can realize the real・-time monitor of rotor broken--bar fault diagnosis and achieve the precise identification to the fre—・ quency component of the broken rotor bar in the FFT spectrum. Key words:DSP;LabVIEW;broken rotor bar;fault diagnosis
0引言 鼠笼式异步电动机由于其结构简单、价格低廉、运行可靠、 适用于各种工作环境等优点,已经成为现代工农业生产中的主 要动力设备。然而,电动机一旦发生故障,必将导致整个生产 过程的停滞,造成巨大的经济损失。在电动机诸多故障中,转 子断条故障危害性严重,且不易识别。如果能够在转子断条故 障早期进行有效检测,就可以防止转子断条的进一步恶化,避 免最终导致损坏电机,将电机故障带来的损失降到最低。 电动机之所以容易产生断条故障,通常是由于电动机长期 运行过程中的频繁启动和重载运行造成的。特别是在启动时 刻,容易造成短时间绕组电流过大,致使转子导体过热,转子电 磁应力急剧变化,转子承受巨大的冲击力,从而引起电动机转 子断条故障的发生。由于鼠笼式异步电动机转子无直接电气 元件引出,所以对运行中的转子直接进行断条故障检测是比较 困难的。常见的方法是通过判断定子电流信号中是否存在(1 —2s)f的断条分量,来判断转子断条故障的发生与否 。 基金项目:河南省高校科技创新人才支持计划项目(2008HASTIT022); 河南省控制工程重点学科开放实验室开发基金项目(KG2009—10) 收稿日期:2011一o7—07收修改稿日期:2012—02—03 在断条故障出现早期,转子断条故障特征分量相对于工频 分量的幅值很小,且电机稳态运行时转差率也很小,导致故障 特征分量和基频的频率十分接近。在进行FFT频谱分析时,由 于工频能量泄漏的影响,断条故障特征分量被淹没,无法进行 断条分量的识别。针对这一问题,采用最小均方算法的自适应 陷波器,能够消除电动机定子电流信号中工频信号对断条信号 的干扰。该方法有效地避免了工频分量对断条分量的能量泄 漏,易于在FFT频谱上进行断条分量的识别。 文中将DSP和LabVlEW有效地结合起来,实现了数据采 集、传输和处理的一体化。通过上位机中的自适应陷波器算法 与快速傅里叶变换算法,实现对电动机转子断条故障进行分析 研究。 1 系统的总体结构设计 鼠笼式异步电动机转子断条故障诊断系统总体结构,如图 1所示,主要包括3 kW鼠笼式异步电动机、霍尔电流互感器、信 号滤波调理电路、TMS320F2812硬件平台、LabVIEW上位机信 号处理平台。 DSP的硬件平台首先通过电流互感器对电动机定子侧电 流信号进行采集。通过采样电阻将电流信号转换成DSP可以 接受的电压信号。为了尽可能降低对断条信号的干扰,将该电 第5期 王新等:基于DSP和LabVIEW的电动机转子断条故障诊断 图1系统总体结构图 压信号送到设计好的滤波调理电路中,转换成TMS320F2812能 够直接接受的0—3.3 V的电压信号,并通过其中的滤波单元 滤除200Hz以上的高频噪声对该断条信号的干扰。然后,再通 过DSP和Pc机的串口总线协议,实现DSP和上位机数据的传 输。最后,通过LabVIEW上设计好的自适应陷波器和快速傅 里叶变换(FFI、)在频率谱上实现对断条故障的检测。 2基于DSP的数据采集系统的设计 系统采用TMS320F2812a片内集成的12位A/D转换器进 行数据采集,利用ICETEK一5100USB V2.0A仿真器,通过USB 接口直接与PC机相连接,在CCS3.3集成开发环境下通过 JTAG接口进行调试、烧写程序 。 该系统的数据采集主程序流程图如图2所示。在 TMS320F2812上电工作后,主程序首先调用初始化系统子程 序,完成对系统的初始化设置,其主要功能是禁止看门狗;设定 锁相环的时钟模式,使其主频达到150MHz;使能外设模块的时 钟。其次调用初始化GPIO子程序,使能SCI功能。禁止全局 中断,禁止CPU中断并清除所有中断标志位。然后调用一系列 初始化子程序,完成PIE控制寄存器、PIE中断向量表、EVA事 件管理器、ADC功能模块、SCI功能模块的初始化。接着将adc _isr入口地址赋值给ADCINT中断向量(当CPU响应ADCINT 向量的中断请求时,程序将跳转到adc—isr()函数的入口地址, 并执行这个中断服务程序)。最后,等待ADC中断的发生。由 于在配置事件管理器EVA时,设定计数模式为连续递增计数 模式,所以通用定时器将按照预定标的输入时钟计数,在定时 器的计数器值与周期寄存器值匹配后的下一个输入时钟的上 升沿复位为0,并启动下一个计数周期。在通用定时器的值变 为0的一个时钟周期后,定时器的下溢中断标志位置位,则产 生一个外设中断请求,启动ADC转换模块。 由于TMS320F2812a与PC机进行串行通信时其缓冲区的 数据位均是8位,而TMS320F2812a采集的数据为l6位的,必 须对逐个数据进行拆分为高8位和低8位,并依次实现数据的 发送。将采集到的2 048个数据保存到Voltage数组中,并向发 送缓冲区(SCITXBUF)装载数据,通过判断发送器空标志位 (TX EMPTY)是否为1,来实现数据的完整性发送。 3 LabVIEW软件平台设计 系统利用虚拟仪器软件架构(Virtual Instruments Software Architecture,VISA)来搭建上位机通信平台,将DSP采集的数据 通过串I:1总线接收到Pc机处理平台上。首先通过配置串口通 讯,选择与DSP程序相应的波特率、数据位、校验位、停止位。 图2主程序流程图 然后将采集的数据转化为16进制的数据形式进行接收,实现 将发送过来的8位数据进行高低位的自动组合。最后,将实时 数据送到自适应陷波器处理单元。 由于采用的变步长LMS自适应陷波器算法较为复杂,文中利 用LabVIEW中的MathScript模块编程很好地解决了这一问 题 一 J。文中采用的变步长LMS算法自适应陷波器算法如下 J:
Y( )=X (n)w(n) (1) e(n)=d(n)一Y(n) (2) W(n+1)=W(rt)+Z (n)e(//,) (n) (3) (J})=0 口 (oIe(n)X(n)1) (4) 式中:X(/Z)为时刻n的输入信号矢量; (n)为自适应陷波器在 时刻n的权向量;d(n)为期望输出值;e(n)为误差信号;O/为 500;13为0.25。 4实验结果分析 实验室电动机相关参数为:电机型号Y100L2—4,额定功 率3 kW,额定电压为380 V,额定电流为6.8 A,额定效率为 0.825,额定功率因数为0.81,额定转速为1 420 r・min~,空载 电流为3.0 A. 在电动机工作在额定负载条件下,电动机的转差率S约为 0.05,断条故障特征分量(1—2s)f的值理论上应该为45 Hz.所 以,以此作为判断电动机转子断条故障发生与否的标准。通过 该系统采集的定子侧电流信号,如图3所示。从其时域波形可 以看到,原本标准的工频电流信号受到断条故障特征分量(1— 2s)f的调制而产生了一定的波动。采用的变步长LMS算法自 适应陷波器的步长变化情况,如图4所示。从步长变化情况可 以看出,采用变步长LMS算法的自适应陷波器,快速地实现了 对断条信号的频率跟踪,并且其稳态误差较为稳定。经过自适 应陷波器的输出信号,如图5所示。如果直接对自适应陷波后 的整个信号进行快速傅里叶变换的频谱分析时,由于工频能量 的泄漏,极严重的影响了断条故障特征分量的识别,容易导致 对电动机作出错误故障诊断。 为了使得断条故障特征分量更加突出,在F丌频谱上有更