北交《自动控制原理》21春作业2
18春北交《自动控制系统及应用》在线作业一二
北交《自动控制系统及应用》在线作业一0一、单选题:1.(单选题)一般函数f(x),规定了参变量x的取值与函数值的对应关系。
然而,最优控制中的性能指标却是随着控制函数u(t)的不同而不同,这种关系称为()。
(满分A欧拉方程B最优控制C泛函D极值正确答案:C2.(单选题)静态速度误差系数Kv越大,稳态误差越(),精度越()。
(满分A小、高B大、高C小、低D大、低正确答案:A3.(单选题)要求系统平稳性好,则要求复数极点最好设置在s平面与负实轴成±()°夹角。
(满分A30B45C60D90正确答案:B4.(单选题)系统频率响应与正弦输入信号之间的关系称为()。
(满分A频率响应B频率特性C根轨迹D传递函数正确答案:5.(单选题)以下不属于控制装置的三种基本功能的是()。
(满分A运行B测量C计算D执行正确答案:6.(单选题)闭环零点越接近()轴闭环零点的减小峰值时间的作用越()。
(满分:)A实轴、明显B虚、明显C实轴、不明显D虚轴、不明显正确答案:7.(单选题)以下不属于连续系统数字仿真常用算法的是()。
(满分:)A常微分方程的解析算法B常微分方程的数值积分算法C离散相似法D微分近似法正确答案:8.(单选题)在随动系统和调速系统中,()不可以作为反馈信号。
(满分:)A数控程序B转速C加速度D电枢电流正确答案:9.(单选题)稳态分量等于(),瞬态分量是一个随着时间t的增长而衰减的振荡过程。
(满分:)A实数B-1C0D1正确答案:10.(单选题)要求系统稳定,则必须使所有的闭环极点位于s()。
(满分:)A实轴B虚轴C右半平面D左半平面正确答案:11.(单选题)系统的时间常数越(),调节时间ts越(),响应过程的快速性也越()。
(满分:) A大、小、好B小、小、好C小、大、好D小、小、坏正确答案:12.(单选题)当输入信号是单位脉冲时,系统的输出就是()。
(满分:)A传递函数B单位脉冲响应C微分函数D时间曲线正确答案:13.(单选题)所谓自动控制就是不需要人的参与,而能控制某些()按照指定的规律变化。
北理工《自动控制理论2》在线作业-0057B0

北理工《自动控制理论2》在线作业-0005
线性系统的系数矩阵A如果是奇异的,则系统存在()平衡点。
A:一个
B:两个
C:三个
D:无穷多个
答案:D
以状态变量为坐标轴所构成的空间,称为()。
A:状态变量
B:状态空间
C:状态方程
D:输出方程
答案:B
对于单变量系统,特征方程的根就是传递函数的()。
A:零点
B:极点
C:拐点
D:死点
答案:B
可观性用来分析()对状态的反映能力。
A:输入
B:输出
C:状态
D:系统
答案:B
线性定常系统可通过状态反馈实现闭环极点任意配置的充要条件是()。
A:系统的状态完全能控
B:系统的状态完全能观
C:系统是稳定的
D:系统能镇定
答案:A
基于能量的稳定性理论是由()构建的。
A:Lyapunov
B:Kalman
C:Routh
D:Nyquist
答案:A
可控性用来分析()对状态的控制能力。
A:输入
B:输出
C:状态
D:系统
答案:A
描述系统输出与状态之间的函数关系的代数方程称为系统的()。
A:状态变量
B:状态空间
C:状态方程
D:输出方程。
20年春北理工《自动控制理论2》在线作业

【奥鹏】-[北京理工大学]北理工《自动控制理论2》在线作业试卷总分:100 得分:100第1题,对于单变量系统,特征方程的根就是传递函数的()。
A、零点B、极点C、拐点D、死点正确答案:B第2题,线性系统的系数矩阵A如果是奇异的,则系统存在()平衡点。
A、一个B、两个C、三个D、无穷多个正确答案:D第3题,系统的输出是y,状态为x,输入为u,状态反馈控制律的形式是()。
A、u=KyB、u=KxC、u=KuD、u=K/y正确答案:B第4题,由初始状态所引起的自由运动称为状态的()。
A、零输入响应B、零状态响应C、输入响应D、输出响应正确答案:A第5题,可控性用来分析()对状态的控制能力。
A、输入B、输出C、状态D、系统正确答案:A第6题,在所有可能的实现中,维数最小的实现称为()。
A、能控标准形实现B、并联形实现C、串联形实现D、最小实现正确答案:D第7题,齐次状态方程的解就是系统在无外力作用下由初始条件引起的()。
A、自由运动B、强迫运动C、离心运动D、旋转运动正确答案:A第8题,线性系统的系数矩阵A如果是非奇异的,则系统存在()平衡点。
A、一个B、两个C、三个D、无穷多个正确答案:A第9题,线性定常连续系统状态方程的解由()部分相加组成。
A、一个B、两个C、三个D、四个正确答案:B第10题,对于初始松驰系统,任何有界输入,其输出也是有界的,称为()。
A、渐近稳定B、BIBO稳定C、平衡状态D、大范围渐近稳定正确答案:B第11题,现代控制理论适用于()系统。
A、单变量控制系统B、多变量控制系统C、线性定常系统D、线性时变系统正确答案:A,B,C,D第12题,工程系统模型建模有两种途径,即()。
A、机理建模B、系统辨识C、人为猜测D、实地测量正确答案:A,B第13题,求解控制系统常微分方程的方法有()。
A、直接求解法B、拉氏变换法C、欧拉法D、极小值法正确答案:A,B第14题,线性定常连续系统的可观测性判据有()。
西交21春自动控制理论(高起专)+答案库考前复习

(单选题)1.若二阶系统的ζ不变,提高Wn,则可以( )
A: 提高上升时间和峰值时间
B: 提高上升时间和调整时间
C: 减少上升时间和峰值时间
D: 减少上升时间和超调量
正确答案: C
(单选题)2.最小相位系统的开环增益越大,其( )
A: 振动次数越多
B: 稳定裕量越大
C: 相位变化越小
D: 稳态误差越小
正确答案: D
(单选题)3.一阶系统的单位阶跃响应曲线中,时间常数 T 时刻对应的响应为稳态响应的( )
A: 98%
B: 95%
C: 87%
D: 66.3%
正确答案: D
(单选题)4.已知二阶系统的单位阶跃响应为x_0 (t)=1+0.2e^(-60t)-1.2e^(-10t),则系统的阻尼比和无阻尼固有频率为( )
A: 24.5, 1.43
B: 1.2, 0.2
C: 600,70
D: 60, 10
正确答案: A
(单选题)5.为了降低噪声干扰,有效的方法是( )
A: 提高系统的型别
B: 降低系统的型别
C: 提高截止频率
D: 降低截止频率
正确答案: D
(单选题)6.一阶系统Φ(s)=1/(Ts+1)的单位斜坡响应的稳态误差为( )
A: T。
《自动控制原理》---丁红主编---第二章习题答案

2-1(1)a.微分方程(2)a.线性定常2-2.方框、信号线、综合点、引出点2-3.变换变量关系保持不变。
2-4. 222222121)(nn n s s s T s T s G ωζωωζ++=++= 2-5. 输入信号)t (r 和输出信号)t (c 及其各阶导数在0t =时的值均为零。
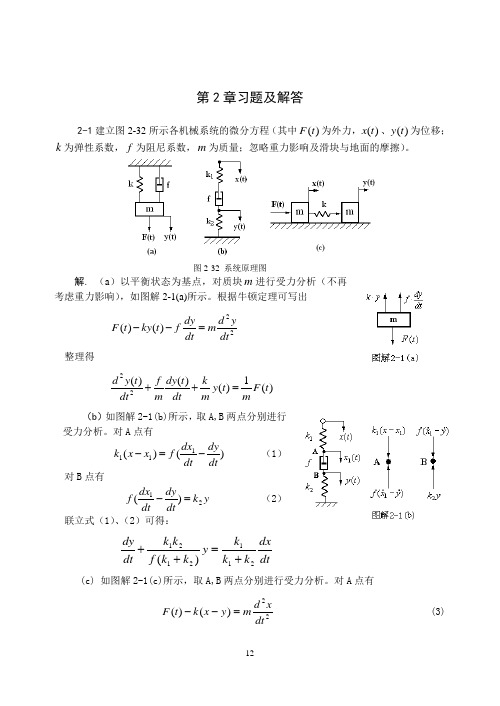
2-6解:取分离体分析受力如图3-1-3所示。
依据牛顿定律可得()()()22)(dt t y d m a m t f t f t f K B =⋅=-- (1) 式中 K f ── 弹簧力;()t f B ── 阻尼力。
弹簧力与物体位移成正比,即)(t y K f K ⋅= (2)式中 K ── 弹簧刚度阻尼力与运动速度成正比,与运动方向相反,即()dtt dy B f B = (3) 式中 B ── 阻尼系数将式(2)和(3)代入(1)中,可得该系统的微分方程式:()()()()t f t Ky dt t dy B dt t y d m =++22 (4) 若令 K B T B =──时间常数;Km T m =──时间常数。
则(4)式可写成: ()()()()()t f K t f K t y dt t dy T dt t y d T a B m==++1222 式中 KK a 1=2-7. 解:(a );;;(b )2-8.543432143221432)1()()()(K K K K K K K s K K K s K s K K K s R s C +++++=τττ 2-9. (a ) 2423241321121413211)()(H G H G G G G G G G H G G G G G G G s R s C ++++++= (b ) HG G G G G G s R s C 2132211)()(++= 2-10. 22121211)()(H G H G G G G s R s C -+= 221212121)()(H G H G G G G G G s N s C c -+-=2-11.4232121213211)()(G H G G H G H G G G G G s R s C ++++= 2-12.(a ) bhdifjdifj bhfj bhdi bcdefk fj di bh abcdefg s R s C -++++++-=)()(1)()( (b ) 3431324321343136543211)1()()(H G G H G H G G G G H G G H G G G G G G G s R s C ++++++= 2-13解:前向通道:3211G G G P =, 412G G P =; 回路增益:1211H G G L -=, 2322H G G L -=,243H G L -=, 3214G G G L -=,415G G L -=;特征式:41321242321211G G G G G H G H G G H G G +++++=∆,11=∆,12=∆; 4132124232121413211)(G G G G G H G H G G H G G G G G G G s ++++++=Φ 2-14 解:前向通道:3211G G G P =,342G G P =;回路增益:213211H H G G G L -=,112H G L -=,233H G L -=,互不接触回路L2和L3特征式:2131112321321H H G G H G H G H H G G G 1++++=∆,11=∆,112H G 1+=∆;21311123213211143321H H G G H G H G H H G G G 1)H G 1(G G G G G )s (++++++=Φ2-15解:先将系统结构图化简为如下形式回路增益:33211H G G G L -=,222H G L -=,113H G L -=,特征式:112233211H G H G H G G G +++=∆ C(s)/R(s):前向通道:3211G G G P =,11=∆, M(s)/N(s): 前向通道:22G P =,12=∆ E(s)/R(s): 前向通道:13=P ,112231H G H G ++=∆ 112233213211H G H G H G G G G G G )s (C R +++=Φ 1122332121H G H G H G G G G )s (N M +++=Φ 11223321112211H G H G H G G G H G H G )s (ER +++++=Φ。
[东北大学]21春学期《自动控制原理Ⅰ》在线平时作业1-答案
![[东北大学]21春学期《自动控制原理Ⅰ》在线平时作业1-答案](https://img.taocdn.com/s3/m/1a816bce5f0e7cd18525366c.png)
[东北大学]21春学期《自动控制原理Ⅰ》在线平时作业1
试卷总分:100 得分:100
一、单选题 (共 25 道试题,共 100 分)
1.下列系统中哪个不是根据给定量的特征分类的
A.连续系统
B.恒值系统
C.随动系统
D.程序控制系统
正确参考选择:A
2.幅相频率特性可以表示成代数形式或指数形式。
()
A.是
B.否
正确参考选择:A
3.此题目对应作业试卷
A.是
B.否
正确参考选择:A
4.对于最小相位系统,相位裕度等于零的时候表示闭环系统处于临界稳定状态。
()
A.是
B.否
正确参考选择:A
5.在自动控制系统中,被控制的物理量称为被控量或输出量。
A.是
B.否
正确参考选择:A
6.在开环控制系统和闭环控制系统中,输入量和输出量存在一一对应关系。
A.是
B.否
正确参考选择:A
7.稳态误差越小,系统的稳态精度越低。
A.是
B.否
正确参考选择:B
8.传递函数的定义:在零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。
A.是
B.否
正确参考选择:A。
自动控制原理第2章课后习题及解答
2-3 证明图 2-34 (a) 所示的力学系统和图 2-34 (b) 所示的电路系统是相似系统 (即 有相同形式的数学模型) 。
图 2-34 系统原理图
解 (a) 取A、B两点分别进行受力分析,如图解2-3(a)所示。对A点有
−y ) = f1 ( y −y 1 ) k 2 ( x − y) + f 2 ( x
比较两系统的传递函数,如果设 R1 = 1 k1 , R2 = 1 k 2 , C1 = f 1 , C 2 = f 2 ,则两系统 的传递函数相同,所以两系统是相似的。 2-4 如图 2-35 所示,二极管是一个非线性元件,其电流 id 和电压 ud 之间的关系为
= id 10−14 ( e 0.026 − 1) ,假设电路在工作点 u(0) = 2.39V , i= (0) 2.19 × 10−3 A 处做微小变
(c) 由图解 2-2(c)可写出
Ur ( = s ) R1 [ I1 ( s ) + I 2 ( s )] + ( Ls + R2 ) I 2 ( s ) 1 I 1 ( s ) = ( Ls + R2 ) I 2 ( s ) Cs U c ( s ) = R2 I 2 ( s )
(6) (7) (8)
F (t ) − k ( x − y ) = m
d 2x dt 2
(3)
- 12 -
对 B 点有
k ( x − y) = m
d2y dt 2
(4)
联立式(3) 、 (4)消去中间变量 x 可得
d 4 y 2K d 2 y K + = F (t ) dt 4 m dt 2 m 2
2-2 应用复数阻抗方法求图 2-33 所示各无源网络的传递函数。
大工20春《自动控制原理》在线作业2参考答案 (1)

大工20春《自动控制原理》在线作业2
试卷总分:100 得分:100
一、单选题(共10 道试题,共50 分)
1.垂直于()上的特征根,它们对应有基本相同的调节时间。
A.原点射线
B.虚轴直线
C.实轴直线
D.实轴或虚轴直线
答案:C
2.()的幅频特性和相频特性都是常量。
A.比例环节
B.积分环节
C.惯性环节
D.振荡环节
答案:A
3.奈奎斯特稳定判据的数学基础是()理论中的映射定理。
A.积分函数
B.微分函数
C.传递函数
D.复变函数
答案:D
4.闭环系统稳定的条件是使特征函数的零点都具有()。
A.正实部
B.负实部
C.正虚部
D.负虚部
答案:B
5.采用(),能使校正后系统满足全部性能指标的要求。
A.串联滞后校正装置
B.串联超前校正装置
C.串联滞后-超前校正装置
D.无源校正装置
答案:C
6.PI调节器又称为()。
A.比例-积分调节器
B.比例-微分调节器
C.积分调节器
D.微分调节器
答案:A。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.在用实验法求取系统的幅频特性时,一般是通过改变输入信号的()来求得输出信号的幅值。
选项A.相位
B.频率
C.稳定裕量
D.时间常数
参考答案:B
2.在直流电动机调速系统中,霍尔传感器是用作()反馈的传感器。
选项A.电压
B.电流
C.位移
D.速度
参考答案:B
3.ω从0变化到+∞时,延迟环节频率特性极坐标图为()。
选项A.圆
B.半圆
C.椭圆
D.双曲线
参考答案:A
4.在系统对输入信号的时域响应中,其调整时间的长短是与()指标密切相关。
选项A.允许的峰值时间
B.允许的超调量
C.允许的上升时间
D.允许的稳态误差
参考答案:B
5.当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个()
选项A.比例环节
B.微分环节
C.积分环节
D.惯性环节
参考答案:B
6.以下说法正确的是()。
选项A.时间响应只能分析系统的瞬态响应
B.频率特性只能分析系统的稳态响应
C.时间响应和频率特性都能揭示系统的动态特性
D.频率特性没有量纲
参考答案:C
7.在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是()。
选项A.减小增益
B.超前校正
C.滞后校正
D.滞后-超前
参考答案:A
8.A、B是高阶系统的二个极点,一般当极点A距离虚轴比极点B距离虚轴大于()时,分析系统时可忽略极点A。
选项A.5倍
B.4倍
C.3倍
D.2倍
参考答案:A
9.惯性环节和积分环节的频率特性在()上相等。
选项A.幅频特性的斜率
B.最小幅值
C.相位变化率
D.穿越频率
参考答案:A
10.若已知某串联校正装置的传递函数为GC(s)=(s+1)/(0.1s+1),则它是一种()
选项A.相位超前校正
B.相位滞后校正
C.相位滞后—超前校正
D.反馈校正
参考答案:A
11.实际生产过程的控制系统大部分是()
选项A.一阶系统
B.二阶系统
C.低阶系统
D.高阶系统
参考答案:D
12.常用的比例、积分与微分控制规律的另一种表示方法是()。
选项A.PDI
B.PDI
C.IPD
D.PID
参考答案:D
13.引出点前移越过一个方块图单元时,应在引出线支路上()选项A.并联越过的方块图单元
B.并联越过的方块图单元的倒数
C.串联越过的方块图单元
D.串联越过的方块图单元的倒数
参考答案:C
14.时域分析的性能指标,哪个指标是反映相对稳定性的()
选项A.上升时间
B.峰值时间
C.调整时间
D.最大超调量
参考答案:D
15.系统和输入已知,求输出并对动态特性进行研究,称为()选项A.系统综合
B.系统辨识
C.系统分析
D.系统设计
参考答案:C
16.开环控制系统分为()
选项A.按给定值操纵
B.按反馈值补偿
C.按干扰补偿
D.按设备绕行补偿
参考答案:AC
17.动态结构图由()组成。
选项A.信号线
B.分支点
C.相加点
D.方框
参考答案:ABCD
18.关于根轨迹的规则有()。
选项A.根轨迹对称于实轴
B.根轨迹的起点和终点
C.根轨迹的分支数
D.根轨迹的渐近线
参考答案:ABCD
19.一般控制系统受到()。
选项A.有用信号
B.偏差
C.波动
D.扰动
参考答案:AD
20.在系统中串联PD调节器,以下说法是正确的()选项A.是一种相位超前校正装置
B.能影响系统开环幅频特性的高频段
C.使系统的稳定性能得到改善
D.使系统的稳态精度得到改善
参考答案:ABC
21.拉氏变换求微分方程的步骤如下()。
选项A.拉氏变换,得到代数方程
B.解代数方程
C.展成象函数表达式
D.对部分分式进行拉氏变换
参考答案:ABCD
22.结构图建立过程中可以得出结构图的基本组成有()。
选项A.串联连接
B.并联连接
C.反馈连接
D.负反馈连接
参考答案:ABC
23.Z变换的方法有()。
选项A.级数求和法
B.部分分式法
C.直接求和法
D.位移求和法
参考答案:AB
24.拉氏变换的基本法则有位移定理和()
选项A.线性性质
B.微分法则
C.积分法则
D.终值定理
参考答案:ABCD
25.用根轨迹的可以分析系统中的参数有()。
选项A.开环极点的位置
B.时间常数
C.系统变量
D.反馈系数
参考答案:ABD
26.以下关于系统稳态误差的概念错误的是()。
选项A.它只决定于系统的结构和参数
B.它只决定于系统的输入和干扰
C.与系统的结构和参数、输入和干扰有关
D.它始终为0
参考答案:ACD
27.常用的线性差分方程的求解方法有()。
选项A.经典法
B.迭代法
C.Z变换法
D.齐次方程法
参考答案:ABC
28.下列属于典型的传递函数是()和一阶微分环节、二阶振荡环节、二阶微分环节、系统传递函数。
选项A.放大(比例)环节
B.积分环节
C.理想微分环节
D.惯性环节
参考答案:ABCD
29.典型的时间响应有()。
选项A.单位阶跃响应
B.单位斜坡响应
C.单位脉冲响应
D.单位时间响应
参考答案:ABC
30.反馈校正常用的被控量有()。
选项A.速度
B.加速度正
C.电路
D.气动
参考答案:AB
31.对数频率的优点是()。
选项A.简化运算
B.绘制近似对数频率特性
C.兼顾高低频
D.频率曲线清晰
参考答案:ABC
32.自动控制系统的组成()。
选项A.控制器
B.被控对象
C.计算机
D.机架
参考答案:ABC
33.闭环控制系统均由以下基本元件组成:()和被控对象、校正装置选项A.敏感元件
B.误差检测器
C.放大元件
D.执行机构
参考答案:ABCD
34.Z反变换的方法有()。
选项A.部分分式法
B.幂级数法
C.反演积分法
D.差分方程法
参考答案:ABC
35.频率特性是一种图解法,有()。
选项A.幅相频率特性
B.对数频率特性
C.偶数频率特性
D.轨迹频率特性
参考答案:AB
36.对单位反馈系统来讲,偏差信号和误差信号相同。
()
选项A.错误
B.正确
参考答案:B
37.对控制系统的首要要求是系统具有稳定性。
()
选项A.错误
B.正确
参考答案:B
38.输入信号和反馈信号之间的比较结果称为偏差。
()
选项A.错误
B.正确
参考答案:B
39.一线性系统,当输入是单位脉冲函数时,其输出象函数与传递函数相同。
()
选项A.错误
B.正确
参考答案:B
40.二阶系统当共轭复数极点位于相位线上时,对应的阻尼比为0.707。
()
选项A.错误
B.正确
参考答案:B
41.在扰动作用点与偏差信号之间加上积分环节能使静态误差降为0。
()
选项A.错误
B.正确
参考答案:B
42.若要求系统的快速性好,则闭环极点应距虚轴越近越好。
()
选项A.错误
B.正确
参考答案:A
43.二阶系统对加速度信号响应的稳态误差为1/K,进行跟踪加速度信号。
()
选项A.错误
B.正确
参考答案:A
44.控制系统线性化过程中,线性化的精度和系统变量的偏移程度无关。
()
选项A.错误
B.正确
参考答案:A
45.对于最小相位系统一般只要知道系统的开环幅频特性就可以判断其稳定性。
()
选项A.错误
B.正确
参考答案:B
46.一阶系统当输入为单位斜坡函数时,其响应的稳态误差恒为时间
常数T(或常量)。
()
选项A.错误
B.正确
参考答案:B
47.闭环控制系统又称为反馈控制系统。
()
选项A.错误
B.正确
参考答案:B
48.一般讲系统的位置误差指输入是阶跃信号所引起的输出位置上的误差。
()
选项A.错误
B.正确
参考答案:B
49.一般开环频率特性的低频段表征了闭环系统的稳态性能。
()
选项A.错误
B.正确
参考答案:B
50.当乃氏图逆时针从第二象限越过负实轴到第三象限去时称为负穿越。
()
选项A.错误
B.正确
参考答案:A。