SCARA机器人的运动学分析
scara四轴机器人丝杆原理
scara四轴机器人丝杆原理概述:scara四轴机器人丝杆原理,是一种机器人操作原理,它是四至机器人中最具代表性的,由于它的机械结构设计独特,它可以提供优秀的性能。
scara四轴机器人可以实现多轴控制运动,具有高精度、高速度、高可靠性等优点,广泛应用于工业制造领域。
一、scara四轴机器人原理的基础scara四轴机器人采用的是丝杆驱动原理,丝杆驱动原理是指通过螺纹副转动螺旋摆杆和丝杆,在两者之间产生相对运动,从而控制机器人的运动、位置和方向。
二、scara四轴机器人中丝杆的角色丝杆是scara四轴机器人中非常重要的一个部件,它的主要角色是将电机产生的回转运动转化为直线运动,从而控制机器人的运动、位置和方向。
通过丝杆的运动,机器人可实现高精度的位置控制。
三、scara四轴机器人丝杆的工作原理机器人的工作原理是由电脑控制驱动输出电的结果,电机转动带动丝杆旋转,丝杆通过固定在螺旋摆杆上的丝杆螺母,将旋转运动转化为直线运动,最终控制机器人的运动、位置和方向。
四、scara四轴机器人丝杆的特点1.高精度:丝杆驱动机构能实现精度高达0.001mm的位置控制。
2.高效率:丝杆驱动机构运动效率高,能够实现快速、精确的位置控制。
3.稳定性高:丝杆驱动机构可以提供稳定的直线运动,防止机器人出现重复误差。
4.结构简单:丝杆驱动机构结构简单,不需要额外的传动机构。
五、scara四轴机器人中丝杆的发展趋势目前,丝杆驱动机构已经逐渐成为scara四轴机器人运动控制的主流方式,未来它仍将继续保持这个趋势。
同时,随着机器人技术的不断发展,丝杆驱动机构的精度、稳定性和性能也会不断提高,将在更多的领域得到应用。
总之,scara四轴机器人丝杆原理是机器人技术中不可或缺的一部分,其优点在机器人制造中扮演着重要的角色。
相信随着技术的不断发展,scara四轴机器人的丝杆驱动机构将变得更加高效、精准和高品质。
SCARA机器人运动学分析

实 验 报 告
学生姓名:
学 号:
一、实验室名称:机电一体化实验室
二、实验项目名称:实验三 SCARA机器人的运动学分析
三、实验原理:
机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。
各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程)为:
226
pz
-220
nx
1
ny
0
输出值
29.587
40.91
d3
-30
-70.494
九、实验结论:
十、总结及心得体会:
十一、对本实验过程及方法、手段的改进建议:
报告评分:
指导教师签字:
(注:可编辑下载,若有不当之处,请指正,谢谢!)
3.装有Windows系列操作系统的PC机
4.KLD-400型SCARA教学机器人控制箱
5.实验平台(带有标尺的)板
七、实验步骤及操作:
1、先把运动控制卡插入ISA插槽,按要求将SCARA机器人的连线都连好;
2、然后运行科利达公司提供的软件,运行菜单栏内的运动学分析,点击正运动学菜单,就会看到操作界面,在要求输入数值的地方输入相应的数值,点击计算按钮,结果就会在文本框中显示,记录下此时的输入与输出值;
2给机器人一组末端的位置和姿态,据运动方程的逆解求机器人对应于这个位置和姿态的全部关节角。然后在机器人实验操作界面上,打开机器人运动分析菜单,输入同样的位置和姿态参数,让机器人求出它达到这个位置和姿态的各关节角,看是否一样。
六、实验器材(设备、元器件):
1.KLD-400型SCARA教学机器人
2.KLD-400型SCARA教学机器人配套软件控制系统
SCARA工业机器人设计计算说明书

SCARA工业设计计算说明书SCARA工业设计计算说明书1、引言这个文档旨在提供关于SCARA(Selective Compliance Assembly Robot Arm)工业的设计和计算的详细说明。
本文档将涵盖的设计原理、运动学计算、动力学计算、控制系统、安全性考虑以及其他相关内容。
2、设计原理2.1 结构设计在设计SCARA工业时,需要考虑的结构类型和材料选择。
此章节将详细描述SCARA的结构设计原理和相关参数。
2.2 运动学原理SCARA的运动学是学中重要的一部分。
此章节将详细讲解运动学原理,包括正逆运动学计算、坐标系选择以及关节角度计算等。
3、运动学计算3.1 正逆运动学计算本章节将介绍SCARA的正逆运动学计算方法及其实际应用。
详细讲解的坐标变换、关节角度计算和工具路径规划等内容。
3.2 轨迹规划在SCARA的应用中,轨迹规划是一个关键的部分。
本章节将介绍常见的轨迹规划算法,并讨论其适用性和实施方法。
4、动力学计算4.1 驱动系统驱动系统是SCARA的核心组成部分之一。
本章节将详细讨论驱动系统的设计和计算,包括电机选择、减速器设计和动力学参数计算等。
4.2 动力学模型动力学模型是的关键组成部分之一。
本章节将介绍SCARA的动力学模型,并详细讨论重要的动力学参数计算和应用方法。
5、控制系统控制系统是SCARA实现精准控制和运动的关键。
本章节将介绍常见的控制系统设计原则和方法,包括PID控制、运动控制算法和通信接口设计等。
6、安全性考虑为了保证SCARA的安全性和人机合作能力,在设计过程中需要考虑相关的安全性因素。
本章节将详细讨论安全性设计原则和相关的安全性机制。
7、其他相关内容本章节将包括SCARA的应用领域、未来发展趋势、经济性评估以及其他相关内容。
附件:本文档涉及的附件包括示意图、计算表格和相关参考资料等。
法律名词及注释:1、SCARA:Selective Compliance Assembly Robot Arm,选择性顺应性装配手臂。
scara机器人工作原理
scara机器人工作原理首先,选择性柔性组装意味着Scara机器人在进行组装任务时具有其中一种程度的灵活性和自适应能力。
它可以根据任务的需要进行不同的动作和位置调整,以适应不同的工件形状和尺寸。
与传统的刚性组装机器人相比,Scara机器人能够更好地适应多样化的组装任务。
其次,Scara机器人的运动控制是通过控制四个关节实现的。
这四个关节包括两个旋转关节和两个平移关节,它们分别控制机械臂在水平和垂直方向的移动。
这种运动控制结构使得机械臂能够在二维平面内进行多种动作和运动轨迹,例如直线轨迹、圆弧轨迹和螺旋轨迹等。
具体来说,Scara机器人的工作原理涉及以下几个方面:1. 动力系统:Scara机器人通常由电机驱动,其中每个关节都有一个电机来控制它的运动。
电机可根据用户指令在特定角度范围内旋转,控制机械臂的运动。
2. 控制系统:Scara机器人的控制系统由一个中央控制器和多个传感器组成。
中央控制器负责处理和执行用户输入的指令,控制机械臂的运动。
传感器可用于获取环境信息和机械臂状态,以实现精确的定位和运动控制。
3. 运动规划:在执行组装任务之前,Scara机器人需进行运动规划,即确定机械臂的运动轨迹和动作顺序。
根据用户输入的组装要求和环境条件,机器人会通过算法计算出最佳的运动轨迹,以实现高效的组装任务。
4.动作执行:一旦运动规划完成,机器人就会根据计算出的运动轨迹执行动作。
它会根据指令将各个关节移动到相应的位置和角度,以完成特定的组装任务。
需要注意的是,Scara机器人通常用于装配和组装任务,例如在电子元件装配、制造业、医疗设备等领域。
机器人的机械结构和运动控制设计使其能够在狭小的工作空间内进行高精度的组装操作。
此外,Scara机器人还可以与其他自动化设备和系统集成,以实现更高级别的自动化生产。
例如,它可以与视觉系统和传输带等设备配合使用,实现自动检测、定位和传送工件,提高生产效率和质量。
总结起来,Scara机器人的工作原理基于选择性柔性组装和运动控制的基本原则,通过动力系统、控制系统、运动规划和动作执行等步骤,实现高精度、高效率的装配和组装任务。
SCARA机器人的设计及运动、动力学的研究

例如,对于需要承受较大载荷的关节或连杆,可以选择高强度轻质材料如铝合 金或钛合金等;对于需要较高耐磨性的部分如转动副,可以选择耐磨钢或硬质 合金等材料。此外,还需要考虑材料的加工工艺性和成本等因素。
4、尺度设计:尺度设计是SCARA机器人结构设计的重要环节之一。应该根据 实际应用需求和工作空间限制来确定机器人的总体尺寸和各连杆的长度、角度 等参数。同时需要注意保持机器人整体结构的协调性和美观性。
21、惯性张量:惯性张量是描述机器人惯性特性的重要参数,包括绕三个轴的 旋转惯量和质量分布等信息。惯性张量的准确计算和控制对于实现SCARA机器 人的稳定运动和精确定位具有重要意义。
211、动力传递:动力传递是SCARA机器人运动的重要环节。通过合理的动力 传递路径和机构设计,可以实现机器人各关节的协调运动,提高机器人的整体 性能和精度。同时,还需要考虑驱动器的选择和优化,以提高机器人的动力输 出和效率。
结论与展望
本次演示对SCARA机器人的设计及运动、动力学特性进行了深入研究,取得了 一定的研究成果。首先,我们介绍了SCARA机器人的设计及运动原理,为后续 研究提供了理论基础。其次,我们对机器人进行了动力学分析,明确了质量、 刚度、阻尼等参数对机器人性能的影响。在此基础上,我们探讨了机器人的运 动控制策略,实现了对机器人精确定位和稳定控制。最后,通过实验研究验证 了机器人的性能。
动力学分析
SCARA机器人的动力学特性是影响其性能的重要因素之一。质量、刚度和阻尼 是决定机器人动态性能的关键参数。在建立动力学模型时,需考虑机器人各关 节的质量分布、驱动力矩等因素,以便更准确地预测机器人的动态行为。通过 对SCARA机器人进行动力学分析,可以有效地优化其结构参数和控制策略,提 高机器人的稳定性和精度。
四自由度scara机器人系统机构设计及运动学分析

calculation of robot was completed based on Monte Carlo methodꎬ and the kinematics model of SCARA robot was established based on d ̄h pa ̄
rameter methodꎬ and the forward and reverse kinematics equations of robot were analyzed. At lastꎬ Matlab motion simulation analysis was car ̄
scara机器人工作原理
scara机器人工作原理Scara机器人是一种常见的工业机器人,其工作原理是通过运动控制系统控制其机械臂的运动,以完成各种任务。
Scara机器人的机械臂通常由多个关节组成,每个关节都可以通过电机、编码器、减速器等装置来控制其运动。
机械臂的各个部件通过连杆连接,在关节处进行旋转运动,并通过关节间的连杆来传递力量。
机械臂的末端通常安装有工具或末端执行器,用于完成具体的任务,如组装、搬运、焊接等。
Scara机器人的运动控制系统主要包括传感器、控制器和执行器。
传感器用于感知环境和机器人自身状态的变化,例如光电传感器、力传感器、视觉传感器等。
控制器是机器人的大脑,通过收集传感器信息、处理算法和控制指令,来实现对机器人的精准控制。
执行器根据控制器的指令,控制机械臂的运动,以实现各种任务。
Scara机器人的运动控制通常遵循几个基本原则,包括运动规划、路径插补、运动控制和优化算法等。
运动规划是指在给定任务的条件下,根据机器人的动力学和几何学模型,确定机械臂的运动轨迹和关节角度。
路径插补是指在确定了运动轨迹后,根据机器人的运动特性,在轨迹上插入合适的点,使机器人能够平稳地运动。
运动控制是指对机械臂的运动进行实时控制,保证机器人按照预定轨迹和速度进行运动。
优化算法是指通过对机器人系统的建模和参数调整,来达到最佳的性能指标,如运动速度、精度、稳定性等。
Scara机器人的工作过程通常包括以下几个步骤:首先,通过传感器获取环境和机器人自身状态的信息;然后,根据任务要求和环境要素,确定机器人的运动路径和关节角度;接下来,进行路径插补和运动控制,使机械臂能够按照预定轨迹和速度平稳地运动;最后,通过执行器控制机械臂完成具体的工作任务。
Scara机器人具有许多优点,例如精度高、重复性好、速度快、可编程性强等。
它在汽车制造、电子组装、食品加工等领域广泛应用,能够提高生产效率和质量,减少人工劳动强度和生产成本。
总之,Scara机器人通过运动控制系统实现对机械臂的精准控制,以完成各种工作任务。
SCARA机器人运动学分析及MA AB建模仿真
动 关 节 (3 关 节 ),实 现 末 端 执 行 器 升 降
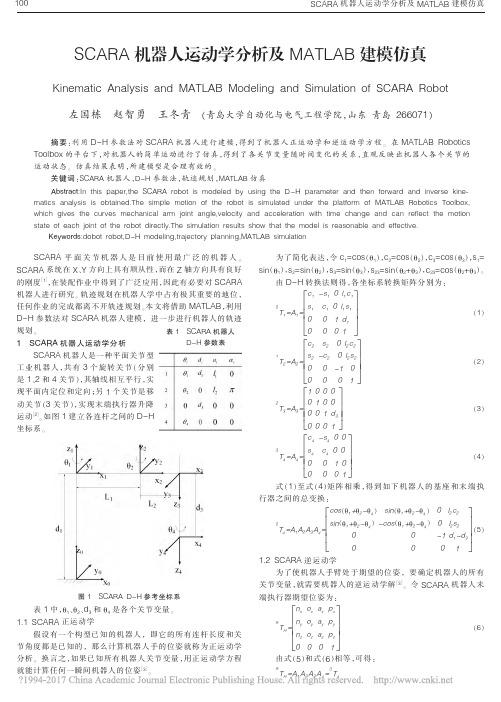
运动[2]。如图 1 建立各连杆之间的 D-H
坐标系。
图 1 SCARA D-H 参考坐标系 表 1 中,θ1、θ2、d3 和 θ4 是各个关节变量。 1.1 SCARA 正运动学 假设有一个构型已知的机器人, 即它的所有连杆长度和关 节角度都是已知的, 那么计算机器人手的位姿就称为正运动学 分析。 换言之,如果已知所有机器人关节变量,用正运动学方程 就 能 计 算 任 何 一 瞬 间 机 器 人 的 位 姿 [3]。
sinθ1
=
(l1
+l2
cosθ2 )py -l2
22
sinθ2
px
px +py
cosθ1
=
(l1
+l2
cosθ2 )px +l2
22
sinθ2
py
px +py
θ1
=arctan
sinθ1 cosθ1
由 式 (8)两 边 矩 阵 元 素 (3,4)对 应 相 等 得 到 :
d3 =d1 -pz
0c2 s2 0 -l2 0
SCARA.plotopt=邀,'workspace',[-300 300 -300 300 -300 300]妖
plot(SCARA,[0 0 0 0])
图 2 SCARA 初始位姿
图 3 SCARA 末位姿
图 4 各关节变量与时间的关系 图 5 各关节变量速度与时间的关系
102
SCARA 机器人运动学分析及 MATLAB 建模仿真
式 (8)左 乘
-1
A2
=0000s2
-c2 0 0 -1
00 0 00
00 0 0 1 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
= (1-5)
式1-5表示了SCARA手臂变换矩阵 ,它描述了末端连杆坐标系{4}相对基坐标系{0}的位姿,是机械手运动分析和综合的基础。
式中: ,
,
, , ,
, ,
机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
八实验数据及结果分析:
1.软件正运动学分析结果:
输入值
20
40
d3
-50
45
输出值
nx
-0.25819
ox
-0.9659
ax
0
px
255.459
ny
0.965926
oy
-0.2588
ay
0
py
185.317
nz
0
oz
0
az
1
pz
-240
手算正运动学分析
输入值
20
40
d3
-50
45
输出值
nx
-0.25820
1)求关节1: (1-8)
式中: ;
2)求关节2: (1-9)
式中: ;
3).求关节变量d3
令左右矩阵中的第三行第四个元素(3.4)相等,可得:
(1-10)
4).求关节变量θ4
令左右矩阵中的第二行第一个元素(1.1,2.1)相等,即:
由上式可求得:
四、实验目的:
1.理解SCARA机器人运动学的D-H坐标系的建立方法;
2给机器人一组末端的位置和姿态,据运动方程的逆解求机器人对应于这个位置和姿态的全部关节角。然后在机器人实验操作界面上,打开机器人运动分析菜单,输入同样的位置和姿态参数,让机器人求出它达到这个位置和姿态的各关节角,看是否一样。
六、实验器材(设备、元器件):
1.KLD-400型SCARA教学机器人
2.KLD-400型SCARA教学机器人配套软件控制系统
226
pz
-220
nx
1
ny
0
输出值
29.587
40.91
d3
-30
-70.494
九、实验结论:
十、总结及心得体会:
十一、对本实验过程及方法、手段的用于学习、研究;不得用于商业用途。
For personal use only in study and research; not for commercial use.
电子科技大学
实验报告
学生姓名:
学号:
一、实验室名称:机电一体化实验室
For personal use only in study and research; not for commercial use
二、实验项目名称:实验三SCARA机器人的运动学分析
三、实验原理:
机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。
толькодля людей, которые используются для обучения, исследований и не должны использоваться в коммерческих целях.
以下无正文
3.装有Windows系列操作系统的PC机
4.KLD-400型SCARA教学机器人控制箱
5.实验平台(带有标尺的)板
七、实验步骤及操作:
1、先把运动控制卡插入ISA插槽,按要求将SCARA机器人的连线都连好;
2、然后运行科利达公司提供的软件,运行菜单栏内的运动学分析,点击正运动学菜单,就会看到操作界面,在要求输入数值的地方输入相应的数值,点击计算按钮,结果就会在文本框中显示,记录下此时的输入与输出值;
3、这个结果与手工算出的结果相比较,是否一致,如果不一致,请分析原因;
4、点击运动学分析菜单下的逆运动学分析的菜单,按要求输入相应的数值,点击计算按钮,结果就会在输出的文本框中显示,记录此时的输入和输出值;
5、这个结果与手工算出的结果相比较,是否一致,由于逆解具有多解性,分析计算时应该舍哪个解是正确的。
2.掌握SCARA机器人的运动学方程的建立;
3.会运用方程求解运动学的正解和反解;
五、实验内容:
1给机器人四个关节各一个位移量,利用运动学分析的正解方程求出它机器人末端的位置和姿态,然后在机器人实验操作界面上,打开机器人运动分析菜单,输入同样的四个位移量,让机器人求出它末端的位置和姿态,看是否一样。
Nur für den persönlichen für Studien, Forschung, zu kommerziellen Zwecken verwendet werden.
Pour l 'étude et la recherche uniquement à des fins personnelles; pas à des fins commerciales.
ox
-0.966
ax
0
px
255.46
ny
0.96593
oy
-0.259
ay
0
py
185.32
nz
0
oz
0
az
1
pz
-240
2.软件逆运动学分析结果:
输入值
px
219
py
226
pz
-220
nx
1
ny
0
输出值
29.5869
40.9066
d3
-30
-70.4935
手算逆运动分析结果:
输入值
px
219
py