大功率风电机变桨距减速器刚柔耦合动力学仿真分析
大型风力发电机组变桨距机构分析与实验研究
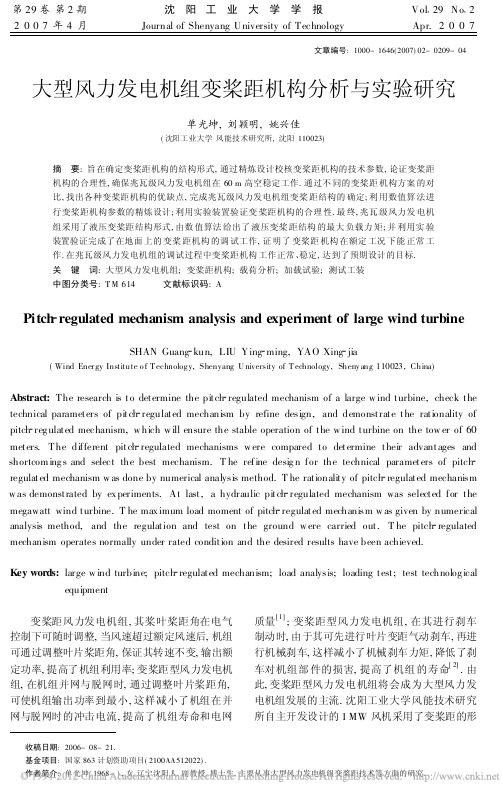
收稿日期:2006-08-21.基金项目:国家863计划资助项目(2100AA512022).作者简介:单光坤(1968-),女,辽宁沈阳人,副教授,博士生,主要从事大型风力发电机组变桨距技术等方面的研究.文章编号:1000-1646(2007)02-0209-04大型风力发电机组变桨距机构分析与实验研究单光坤,刘颖明,姚兴佳(沈阳工业大学风能技术研究所,沈阳110023)摘 要:旨在确定变桨距机构的结构形式,通过精炼设计校核变桨距机构的技术参数,论证变桨距机构的合理性,确保兆瓦级风力发电机组在60m 高空稳定工作.通过不同的变桨距机构方案的对比,找出各种变桨距机构的优缺点,完成兆瓦级风力发电机组变桨距结构的确定;利用数值算法进行变桨距机构参数的精炼设计;利用实验装置验证变桨距机构的合理性.最终,兆瓦级风力发电机组采用了液压变桨距结构形式,由数值算法给出了液压变桨距结构的最大负载力矩;并利用实验装置验证完成了在地面上的变桨距机构的调试工作,证明了变桨距机构在额定工况下能正常工作.在兆瓦级风力发电机组的调试过程中变桨距机构工作正常、稳定,达到了预期设计的目标.关 键 词:大型风力发电机组;变桨距机构;载荷分析;加载试验;测试工装中图分类号:T M 614 文献标识码:APitch regulated mechanism analysis and experiment of large wind turbineSHAN Guang kun,LIU Ying ming,YAO Xing jia(Wind Ener gy Institute o f T echnolog y,Shenyang U niversity of T echnology,Sheny ang 110023,China)Abstract:The research is to determine the pitch regulated mechanism of a large w ind turbine,check the technical parameters of pitch regulated mechanism by refine design,and demonstrate the rationality of pitch reg ulated mechanism,w hich w ill ensure the stable operation of the w ind turbine on the tow er of 60meters.The different pitch regulated mechanisms w ere compared to determine their advantages andshortcom ing s and select the best mechanism.T he refine desig n for the technical parameters of pitch regulated mechanism w as done by numerical analysis method.T he rationality of pitch regulated mechanism w as demonstrated by ex periments.At last,a hydraulic pitch regulated mechanism was selected for the megawatt wind turbine.T he max imum load moment of pitch regulated mechanism w as given by numerical analysis method,and the regulation and test on the ground w ere carried out.T he pitch regulated mechanism operates normally under rated condition and the desired results have been achieved.Key words:large w ind turbine;pitch regulated mechanism;load analysis;loading test;test technolog icalequipment变桨距风力发电机组,其桨叶桨距角在电气控制下可随时调整,当风速超过额定风速后,机组可通过调整叶片桨距角,保证其转速不变,输出额定功率,提高了机组利用率;变桨距型风力发电机组,在机组并网与脱网时,通过调整叶片桨距角,可使机组输出功率到最小,这样减小了机组在并网与脱网时的冲击电流,提高了机组寿命和电网质量[1];变桨距型风力发电机组,在其进行刹车制动时,由于其可先进行叶片变距气动刹车,再进行机械刹车,这样减小了机械刹车力矩,降低了刹车对机组部件的损害,提高了机组的寿命[2].由此,变桨距型风力发电机组将会成为大型风力发电机组发展的主流.沈阳工业大学风能技术研究所自主开发设计的1MW 风机采用了变桨距的形第29卷第2期2007年4月沈 阳 工 业 大 学 学 报Journal of Shenyang University of TechnologyVol 29No 2Apr.2007式.变桨距机构作为变桨距型风力发电机的关键部件直接影响到机组的正常运行,本文对1M W 风力发电机的变桨距机构从理论上进行了精炼设计分析,从实验上论证了变桨距机构的合理性.1 变桨距机构类型变桨距机构是变桨距型风力发电机组的核心.目前国际上大型风电机组的变桨距机构主要有两种实施方案[3]:机械齿轮传动变距与液压驱动变距.机械齿轮传动变距是利用伺服电机作为原动机,经过减速器通过齿轮副,带动桨叶旋转.这种变距方案,每一片桨叶都由一套独立的电动机、减速器和齿轮副驱动,因此变距力大,但电气布线困难,并且要求三个电动机运行同步,增加了控制上的难度.由于电动机、减速器、齿轮等部件均在轮毂内,增加了风轮重量和轮毂制造难度,而且维护也极不方便.液压驱动变距是利用液压缸作为源动机,通过曲柄滑块机构推动桨叶旋转.由于液压系统输出力大,变距机构可以做得很紧凑.液压驱动变距也有两种结构:一种是通过轮毂内三个液压缸和三套曲柄滑块机构分别驱动三片桨叶.这种方案变距力很大,但存在三个液压缸同步控制难,电气布线困难,风轮重量增加,轮毂制造难度加大,维护不便等问题;另一种结构是液压站,液压缸放在机舱内,通过一套曲柄滑块机构同步推动三片桨叶旋转.这种结构电气布线方便,而且降低了风轮重量和轮毂制造难度,维护也很容易,但这种结构要求传动机构的强度、刚度较高.2 大型风力发电机组变桨距机构本兆瓦级风电机组是变桨距型风力发电机组[4],采用的是液压缸作为源动机,通过一套曲柄滑块机构同步驱动三片桨叶变距的方式.2 1 变桨距机构组成本机组的变桨距机构主要由推动杆、支撑杆、导套、防转装置、同步盘、短转轴、连杆、长转轴、偏心盘、桨叶法兰等部件组成.其结构如图1所示[5].图1 变桨距机构Fig 1 Pitch regulated mechanism各组成部件作用如下:推动杆:传递动力,把机舱内液压缸的推力传递到同步盘上.支撑杆:是推动杆轮毂端径向支撑部件.导套:与支撑杆形成轴向运动副,限制支撑杆的径向运动.同步盘:把推动杆的轴向力进行分解,形成推动三片桨叶转动的动力.防转装置:防止同步盘在周向分力作用下转动,使其与轮毂同步转动.其中同步盘、短转轴、连杆、长转轴、偏心盘组成了曲柄滑块机构,将推动杆的直线运动转变成偏心盘的圆周运动.该机构的工作过程如下:控制系统根据当前风速,以一定的算法给出液压缸的位移信号,液压系统根据位移指令信号驱动液压缸,液压缸带动推动杆,同步盘运动,同步盘通过短转轴、连杆、长转轴推动偏心盘转动,偏心盘带动桨叶进行变距.2 2 变桨距机构分析该变桨距机构简图如图2所示.图2 变桨距机构运动简图F ig 2 Schematic movement of pitch regulated mechanism图中:od 摇杆;210 沈 阳 工 业 大 学 学 报第29卷df 连杆;od摇杆初始位置与水平线夹角;X 推杆位移;摇杆从初始位置转过角度;L 连杆长度.该机构的受力分析:该变桨距机构主要承受和传递来自两个方向的载荷:桨叶的旋转力矩和液压缸的输出力.桨叶旋转力矩的x轴分量传给液压缸的推动杆,y轴分量通过防转装置传给轮毂.油缸的输出载荷传递路线则相反,最后通过桨叶法兰的转动达到对桨叶变距操纵的目的.2 3 变桨距机构顺桨力的分析与计算[6]风电机组在工作状态下,作用于每个桨叶变距轴(桨叶大梁)上的阻力矩由如下几部分组成: M1=M j+M z+M m+M e+M f式中:M j 由桨叶本身质量离心力作用而产生的惯性力矩;M z 由空气动力作用而产生的气动力矩;M m 桨叶重心偏离桨叶变距轴而产生的重力矩;M e 弹性变形引起的力矩;M f 由变距机构各摩擦副而产生的摩擦阻力矩.1)由桨叶本身质量离心力作用而产生的惯性力矩M j在变距过程中,桨叶产生的最大惯性阻力矩为M j max=J22=10856 56Nm式中:J 桨叶对变距轴(大梁)的质量惯性矩,2200kg/m2;风轮回转角速度,3 1416/s.2)空气动力作用而产生的气动力矩M z空气动力作用而产生的气动力矩M z已由第602研究所得出计算结果.但其方向与M j相反,是使桨叶安装角增大的方向,且与M j相比其数值也较小,故为了安全起见,可以不考虑.3)桨叶重心偏离桨叶变距轴而产生的重力矩M m设桨叶轴均通过各截面重心,并位于风轮旋转平面内,即M m=0.4)弹性变形引起的力矩M e设桨叶不变形,即M e=0.5)由变距机构各摩擦副而产生的摩擦阻力矩M f支承桨叶轴的轴承是一个回转支承轴承,其空载摩擦阻力矩值为950Nm,其他机构摩擦阻力矩以效率计为0 95.故使桨叶绕桨叶轴转动所需的驱动力矩为M1=(M j max+950)/0 95=12427 96Nm 也就是说,在最恶劣情况下,使桨叶顺桨停机时,需作用于每支桨叶轴上的驱动力矩为M1=12427 96Nm风轮共三支桨叶,故M=M13=37283 87Nm已知驱动桨叶的曲柄长R,曲柄最大角度 =46!,故变距机构拉杆拉力为P=MR cos=82853N=8454 4kg液压站提供给变距机构的力随桨距角的变化而变化[7],其关系如图3所示;在外力矩为37283 87Nm时,变桨距系统所需要的力随桨距角的变化而变化[8],其关系如图4所示.由图3和图4可以看出,在外力矩为37283 87Nm时,变桨距系统工作正常.图3 液压系统压力与桨距角的关系Fig 3 Relationship between hydraulic pressure and pitch angle图4 变距系统需要的力与桨距角的关系(M=37283 87Nm)F ig 4 Relationship betw een necessar y pressure andpitch ang le(M=37283 87Nm)211第2期单光坤,等:大型风力发电机组变桨距机构分析与实验研究3 变桨距机构的负载试验测试目的:在设计外力矩条件下,测试机构能否准确完成顺桨及开桨工作.测试方法:通过测试工装,同时在三个变桨矩轴承内环的桨叶安装孔上加相同的重力,使三个变桨矩轴承内环产生与顺(开)桨力矩相反力矩.设计顺桨力矩:37283 87Nm设计开桨力矩:12428Nm测试工装[9-10]如图5所示,该装置与桨叶轴承内环连接,其上有6个滑轮,开桨时在1、3、5滑轮处各挂上一个重量相等的重锤,使产生转矩为12428Nm;顺桨时在2、4、6滑轮处各挂上一个重量相等的重锤,使产生转矩为37283 87Nm.图5 测试工装F ig 5 T est technological equipment测试结果:1)全行程变桨距试验(开、关桨)动作到位;2)变桨速度试验,动作时间可调、机构运动平稳;3)任意变桨距位置停止准确、位置重复精度和任意位置飘移量满足设计要求.4 结 论从理论上通过数值计算方法精炼设计了兆瓦风力发电机组变桨距机构的技术参数;通过地面试验验证了1MW 兆瓦风力发电机组变桨距机构合理,各部件参数选择正确,可以实现变桨距机构设计的预期目标,为1MW 风力发电机组的安全运行提供了保障.此风机已于2005年7月完成安装和现场调试,变桨距机构工作正常.参考文献:[1]武鑫,赵斌.并网型风电机组的调节控制[J].太阳能学报,2003(4):24-25.(WU Xin,ZHA O Bin.M odulation and control grid connected w ind turbine [J].Solar Energy ,2003(4):24-25.)[2]李强,姚兴佳,陈雷.兆瓦级风电机组变桨距机构分析[J].沈阳工业大学学报,2004(2):146-148.(L I Q iang ,Y AO Xing Jia,CHEN L ei.Pitch mecha nism analysis o f megawatt stage w ind turbine [J ].Journal of Shenyang U niversit y of T echnolog y,2004(2):146-148.)[3]Xing Z X,Chen L.T he compariso n of sever al variablespeed wind generation set construction [A ].T he Sec o nd China I nternat ional Renew able Energy Conference [C].Beijing,2005:361-369.[4]姚兴佳,单光坤.1M W 变速恒频风力电机组结构特点[J].风电新能源,2004(1):25-26.(YAO Xing jia,SHA N Guang kun.T he characteristic of 1M W variable speed and constant frequency w ind turbine [J].Wind Electricit y N ew Energy,2004(1):25-26.)[5]秦立学.兆瓦级风力发电机变桨距机构研究[D ].沈阳:沈阳工业大学,2006.(Q IN L i xue.Research on meg aw att w ind turbine pitch regulated system [D].Shenyang:Shenyang U ni versity of T echnology ,2006.)[6]Yao X J,Liu G D ,San G K ,et al.One mega watt variable speed and constant frequency w ind turbine [A ].4th World W ind Ener gy Conference &Renewable En erg y Ex hibition [C ].M elbour ne,A ustralia,2005:214-219.[7]王栋梁,李洪人,李春萍.非对称阀控制非对称缸系统的静态及动态特性分析[J].机床与液压,2003(1):198-200.(WAN G Dong liang ,L I Hong ren,LI Chun ping.Asymmetrical valve asymmetrical cylinder load flow load pressure stat ic and dynamic property [J].M achine T ool &Hydraulics,2003(1):198-200.)[8]Yao X J,Shan G K,Sun C Z.Character i stic analysis ofhydraulic system o n wind turbine [A].T he Great Wall World Renewable Energ y Forum and Exihibition 2006[C].Beijing,2006:110-113.[9]Shan G K ,Y ao X J.Study on variable pitch regulatedmechanism of 1megawatt w ind turbine [A].4th World Wind Energ y Conference &Renewable Energy Exhi bition [C].M elbour ne,Australia,2005:413-419.[10]Yao X J,Shan G K,Su D H.Study on variable pitch system characteristics of big wind turbine [A ].Inter national Technol ogy and Innovation Conference Advanced Manu facturing Technolog i es [C].Hangzhou,2006:647-651.(责任编辑:吉海涛 英文审校:杨俊友)212 沈 阳 工 业 大 学 学 报第29卷。
风力机变桨距机构的设计及动态仿真

风力机变桨距机构的设计及仿真摘要:本文首先介绍了风力机变桨距机构的原理,在此基础上对风力机变桨距机构进行分析和设计。
通过虚拟样机技术,利用SolidWorks软件建立了风力机变桨距机构的各零、部件的实体模型,并进行装配。
然后将装配好的变桨距虚拟样机模型生成Parasolid(*.x_t)格式,导入动态仿真模拟软件ADAMS中,通过在ADAMS/View中对模型进行相应的定义,完成变桨距机构的运动仿真。
最后对仿真结果进行了后处理,为进一步优化设计做准备。
关键词:变桨距机构;SolidWorks设计;ADAMS仿真Designing and Simulating on the Variable Propeller Pitch Mechanism of WindTurbine-generatorAbstract:This paper first describes the Principles of wind turbine pitch from agencies,On this basis Variable pitch wind turbine analysis and design agencies.Through virtual prototyping technology,Using SolidWorks software to establish a solid model of wind turbine pitch from each institution zero components And assembly,Then the assembled pitch virtual prototype model generation Parasolid (*. x_t) Format,Importing dynamic simulation software ADAMS.By ADAMS / View in the corresponding definition of the model, Completion of the pitching motion simulation from institutions,Finally, the simulation results post-processing, in order to further optimize the design to prepare.Key words:Variable pitch mechanism;SolidWorks design;ADAMS simulation1.引言随着风力发电机技术的不断成熟风力发电机的自动化程度提高,变桨距控制型风力发电机的优越性显得更加突出和必要[1]。
风力机统一变桨距执行机构虚拟设计及仿真

风力机统一变桨距执行机构虚拟设计及仿真
随着风力发电技术的不断发展,风力机成为一种重要的可再生能源发电设备。
风力机的变桨系统是其关键组成部分之一,能够提高风力机的发电效率和控制风机在复杂环境中的安全性能。
因此,设计一种高效、稳定的变桨距执行机构是风力机研究的重要方向之一。
在现代工程设计中,虚拟设计和仿真技术已经成为不可或缺的重要工具。
针对变桨距执行机构的虚拟设计和仿真可以有效地降低试错成本和开发时间,并且可以提高系统的可靠性和性能。
在进行虚拟设计和仿真之前,需要确定变桨距执行机构的功能需求和性能指标。
然后通过数学模型和仿真软件来模拟和分析机构的运动学、动力学和控制。
最终,可以通过虚拟实验来验证机构设计的性能指标,根据仿真结果对机构进行优化设计。
总之,风力机变桨距执行机构的虚拟设计和仿真是现代工程设计的重要手段,它可以有效地促进风力机的发展,并为提高风能利用率做出贡献。
风力发电系统变桨控制模型建立与仿真分析
Vi
=
[1+
3R 4H0
sin(θB1+(i-1
)×
2π 3
)]n×V0
(8)
式中:R 为桨叶长度,θB1 为桨叶 1 的方位角。
权系数依据每个桨叶受风情况来进行分配,风
越大,权系数越大,桨叶节距角变化值也越大。 权系
数Ki 表达式为:
Ki =
3×[1+ 3R 4HO
sin(θB1+(i-1
)×
2π 3
第1期
崔明东等:风力发电机组的独立变桨控制
23
变发电机转子转速使风能利用系数最大; 在高风速
时,调节桨距角来改变发电机输出功率,使输出功率
稳定在额定值附近。 风轮转速或风速改变将引起叶
尖速比变化,影响风能利用系数,从而改变风轮捕获
的机械能功率 Pa,表达式为:
Pa = WrTa
(2)
式中:Ta 为风轮气动力矩,表达式为:
摘 要:为了实现风力发电机组 3 个桨叶的独立控制,依据风力机空气动力学原理和风剪切效应,提出了基于桨叶方位
角信号的权系数分配独立变桨距控制方法。 通过权系数对 3 个桨叶统一的桨距角进行重新分配,将统一变化的变桨角转化为
每个桨叶独立变化的桨距角。 以 2MW 变速变桨风力发电机组为研究对象,基 于 Bladed 软 件平 台 对 该控 制 策 略与 传 统 的变 桨
候、地形环境等因素外,风速的随机变化会因为桨叶
长度的增加而相互抵消, 高度因素的影响反而会更
明显。 风速在竖直高度方向上的变化主要是由风切
效应产生的。
风剪切是指风速随垂直高度的变化, 即风速会
随高度的增加而增加。 假设地面为零风速平面,则
有 风 切 经 验 公 式 [6]为
风力发电装置动力学建模与仿真

风力发电装置动力学建模与仿真随着对可再生能源的需求不断增长,风力发电作为其中的一种重要形式,得到了广泛应用和研究。
风力发电装置的动力学建模与仿真是研究风力发电系统性能和优化设计的关键环节。
本文将从风力发电装置的动力学建模、仿真方法和相关应用等方面进行探讨。
1. 风力发电装置动力学建模风力发电装置动力学建模是研究风力发电系统特性和性能的基础。
动力学建模的目的是描述风力发电装置内部的运动学和动力学特性,以及与外界的相互作用。
1.1 功能分解与系统分析风力发电装置通常由多个组件组成,包括风轮、变速器、发电机等。
首先,我们需要对风力发电装置进行功能分解和系统分析,确定各个组件之间的关系和作用。
1.2 运动学建模运动学建模是描述风力发电装置内部各个部件的运动状态和位置的过程。
通过运动学建模,我们可以了解风轮的叶片角度、风轮和转子之间的转速等参数。
1.3 动力学建模动力学建模是描述风力发电装置内部各个部件之间相互作用的过程。
通过动力学建模,我们可以了解风轮受力情况、发电机的转矩和输出功率等参数。
2. 仿真方法仿真是通过计算机模拟风力发电装置在不同条件下的运行状态和性能的过程。
仿真方法可以提供定量的数据和结果,用于分析和评估风力发电系统的性能,优化设计和控制策略。
2.1 数学建模与控制方程基于动力学建模的结果,我们可以建立数学模型和控制方程描述风力发电装置的运动和响应规律。
这些方程可以包括风力的变化、风轮的旋转、转速的调整等。
2.2 数值方法与计算模拟仿真过程通常使用数值方法和计算模拟进行。
数值方法可以将模型离散化,通过迭代计算来解决微分方程和差分方程。
计算模拟则是通过模拟计算机程序的运行来模拟实际情况。
3. 相关应用与发展趋势风力发电装置动力学建模与仿真在风力发电行业中具有重要的应用价值和研究意义。
3.1 性能优化与设计改进通过动力学建模和仿真,我们可以评估风力发电装置的性能,发现存在的问题并进行相应的优化。
变桨距风力发电机组控制方法研究和仿真

图 1所示。
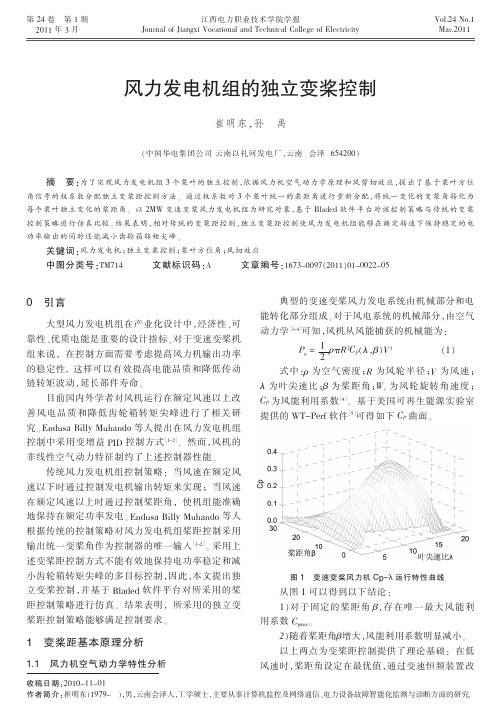
º对于任意的叶尖速比 K, 桨叶节距角 B= 0b时的风 能利用系数 Cp 相对最大。桨叶节距角 B增大, 风能 利用系数 Cp 明显减小。以上两点为变速恒频变桨 距控制提供了理论基础: 在风速低于额定风速时, 桨 叶节距角 B= 0b, 通过变速恒频装置, 随风速变化改 变发电机转子转速使风能利用系数恒定在 Cpm ax, 捕 获最大风能, 并输出电能频率不变; 在风速高于额定 风速时, 调节桨叶节距角从而改变发电机输出功率, 使输出功率稳定在额定功率附近。
参考文献:
[ J]. 3 d ASME / JSME Joint F lu ids Engineer ing Confe r2 ence . 1999, 7: 18O23.
(上接第 70页 )
[ 10] 钱正安, 贺慧霞、瞿张, 等. 我国西 北地区 沙尘暴 的分 级标准个例谱 及其 统 计特 征 [ A ]. 中 国沙 尘 暴研 究 [ C ]. 编著钱正 安. 北京: 气象出版社. 1996.
[ 11] 张宁, 黄维, 陆荫, 等. 沙尘 暴降尘 在甘肃 的沉降 状况 研究 [ J]. 中国沙漠 , 1998, 18( 1) : 32O37.
[ 12] 张宁, 牛耘, 李春生, 等 . 兰 州市大 气降尘 沉积物 的粒 度分布特征研究 [ J]. 干旱环境监测, 1998, 12( 1): 15O 1 9.
[ 17] 张宁, 吴仁铭. 兰州市 大气颗 粒物中水 溶性离 子研究 [ J]. 环境化学, 1994, 13( 5): 453O45.
[ 20] 黄雪莲, 金 煜. 沙 尘暴 PM2. 5 PM10对大 鼠肺 泡巨 细胞 炎性因 子分泌的影 响 [ J] . 环 境与健康杂 志, 2004, 21 ( 1): 38O40.
风力发电机组电动变桨距机构设计与仿真
这里基于一种新型的变距机构-电作动筒变桨进行了矢量环建模与MATLAB动态仿真分析。
1变桨距控制原理从能量转换的角度看,风力发电的原理是利用风轮转子将风能转化为机械能,再通过转轴、增速箱带动发电机旋转从而将机械能转化为电能。
其中风力机的功能是将风能转换为机械能。
由于流经风轮转子后的风速不可能为变为零,所以通过风轮扫掠面积内的全部风能不可能被风轮转子全部捕获,存在一个风能利用系数:Cp=P12!・A・v3(1)其中:P—单位时间内风轮吸收的机械能;!—空气密度,单位:mg/m3;A—风轮叶片扫掠面积,单位:m2;v—风速(指未扰动气流的流速),单位:m/s。
CP最大值为0.593,此即为有名的贝兹极限[1]。
变桨距风力机的风能利用系数CP与叶尖速比λ和桨叶的节距角β成非线性关系。
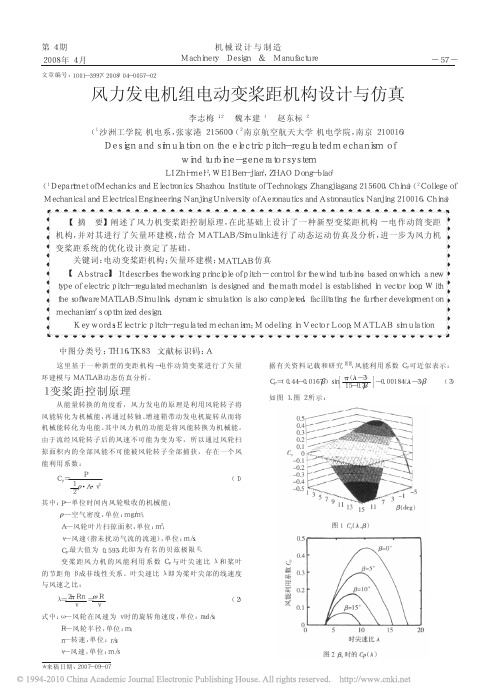
叶尖速比λ即为桨叶尖部的线速度与风速之比:λ=2!Rnv=$Rv(2)式中:ω—风轮在风速为v时的旋转角速度,单位:rad/s;R—风轮半径,单位:m;n—转速,单位:r/s;v—风速,单位:m/s据有关资料记载和研究[2][3],风能利用系数CP可近似表示:CP=(0.44-0.0167#)sin!("-3)15-0.3#!"-0.00184("-3)#(3)如图1、图2所示:图1Cp(λ,β)图2βx时的Cp(λ)0.50.40.30.20.10-0.1-0.2-0.3-0.4-0.5Cpβ(deg)135791113151173-1-5风力发电机组电动变桨距机构设计与仿真李志梅1,2魏本建1赵东标2(1沙洲工学院机电系,张家港215600)(2南京航空航天大学机电学院,南京210016)Designandsimulationontheelectricpitch-regulatedmechanismofwindturbine-generatorsystemLIZhi-mei1,2,WEIBen-jian1,ZHAODong-biao2(1DepartmetofMechanicsandElectronics,ShazhouInstituteofTechnology,Zhangjiagang215600,China)(2CollegeofMechanicalandElectricalEngineering,NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,China)############################################$#############$############################################$#############$【摘要】阐述了风力机变桨距控制原理,在此基础上设计了一种新型变桨距机构-电作动筒变距机构,并对其进行了矢量环建模,结合MATLAB/Simulink进行了动态运动仿真及分析,进一步为风力机变桨距系统的优化设计奠定了基础。
风力发电机组独立变桨控制技术仿真与试验研究

风力发电机组独立变桨控制技术仿真与试验研究文|兰杰,莫尔兵,林淑,羊森林,王其君为了实现可持续发展,风能作为一种清洁、可再生能源受到世界各国的广泛关注,已成为重点开发的能源之一。
国内外大型的风电机组大多采用变速变桨技术,变速变桨风电机组的桨距角控制分为统一变桨和独立变桨。
统一变桨控制,即控制系统对三套变桨执行机构执行同一桨距角指令,也是目前机组使用最多的控制方式。
而随着变速变桨风力发电机组容量的增加,风轮直径越来越大,风湍流、风切变、塔影效应、偏航偏差等因素使得整个风轮面受力的不均衡度随之增强,附加载荷也越来越大,严重威胁风电机组的安全运行。
独立变桨控制技术应运而生,通过优化的控制,给每支叶片叠加一个独立的桨距角信号,来降低这些附加的不平衡载荷,以提高系统运行可靠性和稳定性并延长机组使用寿命。
本文的独立变桨控制技术是将叶根应力传感器测量出来的各叶片根部的载荷及风轮方位角,通过滑环传送至所设计的独立变桨控制器以获得独立变桨期望的桨距角,最后将独立变桨期望的桨距角和统一变桨给定的桨距角之和作为风力机三支桨叶桨距角的控制量,以实现风电机组的独立变桨控制器设计,通过仿真和现场试验验证所设计独立变桨控制技术的有效性。
风轮不平衡载荷分析实际运行的风力发电机组由于在不同方位,叶片所受载荷不同,如图1所示。
其中,M y1、M y2、M y3为每支叶片受到的Y向弯矩,也即面外弯矩,M yq和M yd为其分解到旋转正交坐标系上的弯矩,M yaw和M tilt为分解到静止正交坐标系上的弯矩,φ(t)为静止坐标系和旋转坐标系之间的夹角。
从图1、图2可知,若三支叶片的M yi不同,则分解产生的M tilt和M yaw弯矩不为零,从而产生了整个风轮的不平衡载荷。
独立变桨控制要控制转速,即保证三支叶片受到的M x 总和不变,这样风轮的扭矩基本保持不变,不会影响机组的发电效率,同时要减小叶轮上不均衡载荷,仅在每只叶片上叠加一个周期变化的分量,该分量均值为零,近似呈正弦变化,在一个旋转周期内,平均变化量为零,这样就减小了旋转坐标系下的M yd和M yq,也即静止坐标系下的M yaw 和M tilt。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同理 , 定义 负载 函数 为 :
t i me )= s t e p ( t i m e , 1 , 0, 2 ,一7 5 0 0 0 0 0 0 )
上两 式 中下 标 , 、 、 N、 C分 别 表 示 内部 自 由 度、 边 界 自由度 、 正 交模 态 和约束 模态 .
得 到 柔性 体 的动力 学方 程 为 :
对应 , 则有 :
= =
A M S 为建模平台, 建立摆线轮为柔性体的刚柔耦
合动 力学 模型 , 研究 其 动力学 特性 , 为 减速器 的优 化设 计提 供理论 依0分别 为单位 阵和零 矩阵 ; 为位移矩 阵. 利 用模 态矩 阵 对 质 量 和 刚 度 阵 进 行 第 一
大 功 率 风 电机 变 桨 距 减 速 器 刚 柔 耦 合 动 力 学仿 真 分 析
何卫 东, 李 小龙 , 卢琦
( 大连 交通大学 机械工程学 院, 辽宁 大连 1 1 6 0 2 8 ) 米
摘 要 : 利用 A N S Y S和 A D A M S对二级摆线针轮减速器进行动力学仿真 , 建立一 、 二级传动关键部件摆线轮
国外 大功 率风 力发 电机 变桨距 减速 器主要 有 两种 形式 : 多 级渐 开 线 齿 轮行 星 减 速 器 和二 级 摆
线针 轮行 星减 速 器. 新 型 摆线 针 轮 传 动 具有 体 积
赋予柔性体一个模态集 , 采用模态展开法 , 用模态
向量 和模 态 坐 标 的线 性 组 合 表 示 物 体 的 弹 性 位 移, 通 过计算 每 一 时刻 物 体 的弹性 位 移来 描 述 其
既有 自转 又有 围绕偏 心轴 进 行 公 转 , 其 与针 齿 啮
有模 态 ( ≠0 ) , 其 与 内部 自由度 , 一 一对 应 ; 而约 束模 态 q 。 是指 依次 释放 每一 个边 界 自由度 , 使其 产生单 位 位移 而形成 的静 位移 分布 所构 成 的 静态 模态 ( 。=0 ) , 约束 模态 q 与约 束 自由度
为柔性体的刚柔耦合动力学模型. 在满载工况下对减速器动态响应进行仿真. 分析摆线轮的弹性变形对系统
动力学特性的影响. 结果表 明, 此工况下摆线轮与针齿的啮合力增大, 系统 的振动明显大于多刚体系统.
关键词 : 针摆行星传动 ; 刚柔耦合 ; 仿真 ; 振 动
文献标识码 : A
0 引 言
M/ z+ = O, £ )
根据 文献 [ 5 ] 钢材料 的碰 撞参 数 , 设 置接 触力 的各参数 为 : B o d y l 、 B o d y 2均 为 s t e e l , k=1 0 ; C=
5 0. 0 0;E = 1 . 5; d =0 .1 mm ;口 =0. 1 mm ; =1 0
K: t I f K  ̄ b : 『 K C c O 1
L D KⅣ ⅣJ
( C r a i g — B a m p t o n ) 法建立的 , 该方 法 的基 本 思 想 是
米 收 稿 日期 : 2 0 1 3 - 0 3 — 1 3
基金项 目: 国家 自然科 学基 金资助项 目( 5 1 0 7 5 0 4 9 ) 作者简介 : 何卫 东( 1 9 7 4一) , 男, 教授 , 博士 , 主要从事现代机械传动 的研究
次 坐标 变换 ( 静凝 聚变 换 ) , 得 到模 态 坐标 系 的质 量 阵和 刚度 阵
1 Cr a i g — B a mp t o n模 态 综 合 理 论
A d a ms / F l e x的 原 理 是 基 于 子 结 构 模 态 综 合
( C o m p o n e t Mo d e S y n t h e s e s , C MS ) 的 固 定 交 界 面
轮行 星减 速器 . 对 于 二 级 摆线 针 轮 行 星 减 速器 的 研究 是 十分必 要 的.
式中, 为主模态矩阵 ; , c 为约束模态矩阵 , 可
通过 静态平 衡关 系求 得.
主模 态 q 是 交 界 面完 全 固定 时 所 对 应 的 固
在减 速器 传 动 过 程 中 , 摆 线 轮 的运 动形 式 是
E- m ai l : l i x i a o l on g 69 93 @ 1 63. c o n. r
第2期
何 卫东 , 等: 大功率风 电机变桨距减速器 刚柔 耦合 动力 学仿 真分析
4 9
M: r :『 肘 c c肘 1
Mc N MN N l
r ( t i me )=2 8 5 0 d s t e p ( t i me , 0, 0 , 1 , 1 ) ;
第3 5卷
第 2期
大
连
交
通
大 学
学
报
2 0 1 4年 4月
J O URNAL O F DAL I AN J I AO TO NG UNI VE RS I T Y
文章编号 : 1 6 7 3 — 9 5 9 0 ( 2 0 1 4 ) 0 2 — 0 0 4 8 . 0 4
变 形行 为 . 在 固定交 界 面法 中 , 令 子结 构 r 交 界 面完 全 固定 , 并 建立 如下模 态 矩 阵 [ ] l 4 J : [ ] ,= [ 。 】
小、 质量轻 、 传 动 比范 围大 、 传 动效 率高 、 同时啮合 齿数 多 、 传 动平 稳 、 噪 声 小 等诸 多优 点 … . 但 由 于 国外 技术 封锁 , 我 国 目前 只 能使 用 三 级 渐 开线 齿
一 一
合时 的微 小变形 在 其大 范 围高速运 动 时对 系统 的
动力学 特性 会产 生 很 大 的 影 响 J . 所 以只 对 减 速
器进 行 多刚体 动 力学 分析 是 不 够 的 . 本 文 以 刚柔
耦合 动力 学理 论为 基 础 , 以P r o / E, A N S Y S和 A D —