健骑机刚柔耦合动力学仿真分析
刚柔耦合机械系统动态特性仿真与分析

刚柔耦合机械系统动态特性仿真与分析近年来,随着科技的不断发展和机械工程领域的进步,刚柔耦合机械系统逐渐成为了研究热点。
刚柔耦合机械系统由刚性部分和柔性部分组成,刚性部分负责传递力量和实现运动控制,而柔性部分则通过弹性变形来减小冲击和振动。
动态特性仿真与分析的研究,可以帮助我们更好地了解刚柔耦合机械系统的运动规律和优化设计。
刚柔耦合机械系统是一个复杂且多变的系统,因此进行仿真和分析是必不可少的一步。
在进行仿真前,我们需要建立系统的数学模型。
数学模型可以描述系统的运动方程和力学关系,是进行仿真与分析的基础。
通过数学模型,我们可以对系统的动态特性进行定量描述,如自然频率、振型等。
一种常见的建模方法是基于有限元分析(FEA)。
FEA可以将复杂的几何结构离散为许多小的有限元,通过求解有限元的位移和变形来分析整体系统的动态响应。
对于刚柔耦合机械系统而言,我们可以将刚性部分建模为刚体,柔性部分建模为弹簧或梁。
通过选择合适的单元类型和约束条件,可以模拟系统在不同载荷下的振动响应和应力分布。
在进行仿真分析时,需要考虑到系统的初始条件和边界条件。
初始条件包括系统的初始位置、速度和加速度等。
边界条件则包括约束和外部施加力等。
通过改变这些条件,我们可以研究系统在不同工况下的响应情况。
例如,可以研究系统在不同频率下的共振现象和应力集中情况,以评估系统的可靠性和安全性。
刚柔耦合机械系统的动态特性仿真与分析可以帮助我们优化系统设计和改进产品性能。
通过仿真,我们可以在不同参数和条件下评估系统的响应,从而提供优化设计方案的依据。
例如,在设计机器人手臂时,我们可以通过仿真分析手臂的振动频率和振幅,进而改进结构和材料的选择,以提高手臂的工作稳定性和精度。
此外,仿真和分析还可以帮助我们预测系统的故障和损坏。
通过分析系统在不同载荷下的应力和变形分布,我们可以评估系统的强度和刚度,以判断系统是否会发生破坏性失效。
这对于预防事故和优化维护策略具有重要意义。
基于刚柔耦合动力学仿真的起落架舱门优化

F(x)二{
(13)
fmax + P ( x ) g( x )〉0G— 1,2,…,m)
式中:九ax为种群中所有可行解的最大函数值;P ( x )
为罚函数,可表示为:
工 P(x)二 gjgj(x))
(14)
其中a为罚函数强度因子。
根据以上理论,提出基于刚柔耦合运动仿真的 神经网络遗传算法复合材料结构优化方法,流程如 图2所示。
刚柔耦合动力学与刚体动力学的不同之处在于
收稿日期:2020-09-14 作者简介:梁力(1991-),男,硕士,工程师,主要从事飞机结构优化方面的设计,lill991.0@。
46
基于刚柔耦合动力学仿真的起落架舱门优化
2021年6月
考虑了柔性部件变形对运动的影响,通常采用模态 综合的方法,本文使用C-B部件模态综合法对起落 架舱和舱门进行柔性建模,柔性体物理自由度和CB部件模态之间满足以下关系:
为约束函数gj(x)的个数;l为约束函数hk(x)的个
数;xf和xf分别为设计变量x.的下限和上限。
在实际应用时,复合材料的铺层厚度和铺设角
通常不能取任意值,铺层厚度必须是单层厚度的整
数倍,铺层角通常为±45。、0。和90°,因此复合材料
优化是一种离散的叠层顺序优化。遗传算法求解优
化问题,无须求解目标函数的导数,适用于目标函数
隐藏层输出H可表示为:
n
d=/(Y ,=1
j= 1,2,…,Z
(6)
式中,/(*)隐藏层激励函数可表示为:
1 -e-2%
/( %) =
(7)
1 +e
BP神经网络输出层预测输出。可表示为:
Z
°k =工叫4+仿,k = 1,2,…,m (8) =1
刚柔耦合仿真分析流程及要点
本文主要介绍使用SolidWorks、HyperMesh、ANSYS和ADAMS软件进行刚柔耦合动力学分析的主要步骤。
一、几何建模在SolidWorks中建立几何模型,将模型调整到合适的姿态,保存。
此模型的姿态不要改动,否则以后的MNF文件导入到ADAMS中装配起来麻烦。
二、ADAMS动力学仿真分析将模型导入到ADAMS中进行动力学仿真分析。
为了方便三维模型的建立,SolidWorks中是将每个零件单独进行建模然后在装配模块中进行装配。
这一特点导致三维模型导入到ADAMS软件后,每一个零件都是一个独立的part,由于工作装置三维模型比较复杂,因此part数目也就相应的比较多,这样就对仿真分析的进行产生不利影响。
下面总结一下从三维建模软件SolidWorks导入到ADAMS中进行机构动力学仿真的要点。
(1)首先在SolidWorks中得到装配体。
(2)分析该装配体中,至U底有几个构件。
(3)分别隐藏其他构件而只保留一个构件,并把该构件导出为*.x_t格式文件。
(4)在ADAMS中依次导入各个*.x_t文件,并注意是用part的形式导入的。
(5)对各个构件重命名,并给定颜色,设置其质量属性。
(6)对于产生相对运动的地方,建议先在此处创建一个marker,以方便后面的操作。
否则,三维模型进入ADAMS后,线条繁多,在创建运动副的时候很难找到对应的点。
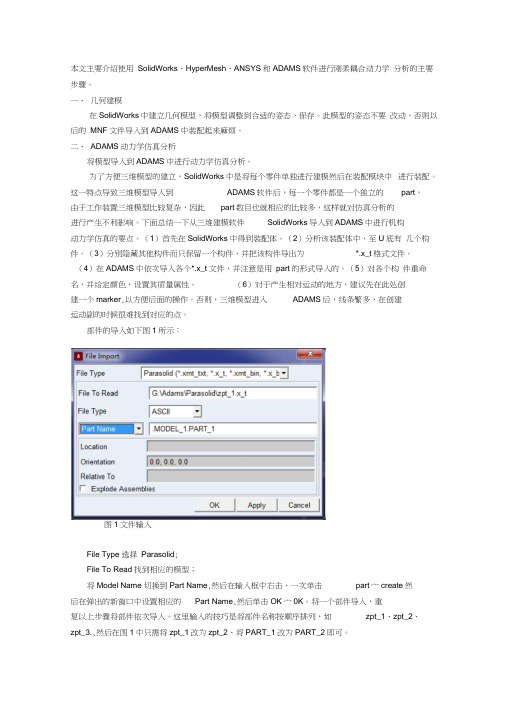
部件的导入如下图1所示:图1文件输入File Type 选择Parasolid;File To Read找到相应的模型;将Model Name 切换到Part Name,然后在输入框中右击,一次单击part宀create然后在弹出的新窗口中设置相应的Part Name,然后单击OK宀0K。
将一个部件导入,重复以上步骤将部件依次导入。
这里输入的技巧是将部件名称按顺序排列,如zpt_1、zpt_2、zpt_3.,然后在图1中只需将zpt_1改为zpt_2、将PART_1改为PART_2即可。
机械系统中的刚柔耦合动力学分析

机械系统中的刚柔耦合动力学分析引言机械系统的刚柔耦合动力学分析是研究刚性部件和柔性部件耦合工作时的振动特性和动力学性能的过程。
刚柔耦合系统由刚性和柔性部件组成,其刚性部件具有高刚度和低振动特性,柔性部件则具有低刚度和高振动特性。
刚柔耦合分析在现代工程设计和制造中具有重要的作用,尤其是在飞行器、机器人、精密仪器等领域中的应用。
一、刚柔耦合动力学模型刚柔耦合动力学模型是描述该系统振动行为的数学模型。
该模型可以基于刚体动力学和弹性体动力学原理建立。
刚体动力学模型涉及质点、刚体的平移和旋转运动方程,弹性体动力学模型涉及刚体振动的波动方程和柔性部件的变形方程。
综合考虑刚体和弹性体的动力学模型,可建立刚柔耦合动力学模型,用于研究振动响应和动力学性能。
二、刚柔耦合系统的耦合方式刚柔耦合系统的耦合方式主要包括刚体与柔性部件的物理耦合和动力学耦合。
物理耦合是指刚体和柔性部件通过连接件(如螺栓、焊接等)实现的实体耦合,确保其共同工作。
动力学耦合是指刚体和柔性部件在振动过程中相互作用和影响。
物理耦合和动力学耦合的研究有助于理解刚柔耦合系统的振动特性和动力学行为,提高系统工作的稳定性和可靠性。
三、刚柔耦合系统的振动特性分析刚柔耦合系统的振动特性是研究该系统固有频率、模态形状和振型等振动性质的过程。
通过振动特性分析,可以确定系统的谐振频率和振型,为系统优化设计和振动控制提供依据。
常用的方法包括有限元分析、模态分析和振动测试等。
其中,有限元分析是一种基于数值计算的方法,可以模拟系统的振动响应,模态分析可以获得系统的固有频率和模态形状,振动测试可以直接测量系统的振动状态。
四、刚柔耦合系统的动力学性能分析刚柔耦合系统的动力学性能是研究该系统在外部激励作用下的响应和行为。
动力学性能分析主要包括动力学模态分析、频率响应分析和阻尼特性分析等。
动力学模态分析可以研究系统在特定工况下的振动行为和能量分布,频率响应分析可以研究系统在不同频率下的响应特性,阻尼特性分析可以研究系统的振动耗能和稳定性。
刚柔耦合并联机器人动力学建模及仿真研究

刚柔耦合并联机器人动力学建模及仿真研究1.前言刚柔耦合并联机器人是一种新型的机器人技术,其特点是结合了刚体机器人和柔性机器人的优点,在运动控制、机械刚度、操作灵活性等方面具有很大的优势。
本文旨在通过对刚柔耦合并联机器人的动力学建模及仿真进行研究,探索其在机器人领域的应用前景。
2.刚柔耦合并联机器人的概念和特点刚柔耦合并联机器人是指将刚体机器人和柔性机器人结合起来,构成一种新型的机器人系统。
其特点在于,将多个刚体部分通过柔性连接构成一个整体,在此基础上再进行机械臂设计及运动控制,使得机器人系统在运动中能够具备较高的柔性和韧性,同时兼备高刚度和高精度的优点。
与传统的刚体机器人相比,刚柔耦合机器人具有以下几个方面的特点:(1)柔性连接:用柔性连接将多个刚体部分构成一个连续的机械臂结构,使得机械臂在操作时能够兼顾柔性和刚度。
(2)高韧性:由于采用了柔性部件,机械臂的韧性得到了提高,在进行协作任务时具有较好的适应能力。
(3)高效率:柔性部件的加入使得机械臂的运动更加平稳,能够在较高的速度下进行操作,提高了工作效率。
3.刚柔耦合并联机器人的动力学模型为了更好地掌握刚柔耦合并联机器人的运动特性,需要对其进行动力学建模。
在机器人运动学模型中,关节角度、连杆长度以及机器人末端的空间位置是非常重要的参数。
在刚柔耦合机器人中,由于连接部件的柔性,连接部件的长度随时间和机器人的运动而变化。
因此,建立刚柔耦合并联机器人的动力学模型需要考虑柔性连接部件的材料特性和节点运动方程。
在建立动力学模型时,可以采用Lagrange动力学方法。
其中,Lagrange的动力学方程可以表示为:Lagrange(T)- Lagrange(U)=d/dt(dL/d/dt(T))其中T表示机械臂的运动状态参数,U表示势能,L表示机械臂的动能。
利用该方程可以求解机械臂在运动过程中所受到的各种力。
4.刚柔耦合并联机器人的运动控制刚柔耦合并联机器人的运动控制是实现机器人高精度和高柔性的重要措施。
健骑机虚拟样机的建立与仿真分析

河南科技学院2009届本科毕业论文(设计)论文题目:健骑机虚拟样机的建立与仿真分析学生姓名:刘松所在院系:机电学院所学专业:机械设计制造及其自动化导师姓名:付素芳完成时间:2009 年5月20日摘要健骑机是一种作用于腿部及胸部肌群,可使全身80%的肌肉和关节同时参加运动的一种不可多得的健身器材。
本文以学院东操场边的健骑机实物为参考,在研究分析健骑机的组成和各零件间的相互关系的基础上,测量其各零件的数据。
首先利用Pro/E建模功能对各零件进行建模;然后利用Pro/E的装配模块,通过定义“驱动”,完成了快速成型机的运动仿真,并在此基础上进行干涉分析,经过干涉分析找出问题,再回到三维模型中去完善模型,最终生成满足设计要求的健骑机模型,为其结构动态优化设计提供参考。
关键词:健骑机,Pro/E,建模AbstractCycling equipment acting on the leg and chest muscle, is a rare equipment that enable 80% of the whole body’s muscles and joints to move at the same time. In this paper,study on the composition of the cycling equipment parts and analysis of the specific relationship between the various parts have been carried out according to the cycling equipment at the east of the college's playground; the data of its every part measured as well.First of all , the paper has builded the model using Pro/E modeling capabilities. Then, through defining the ’driver’ and using the Pro/E assembly module software, it has completed the motion simulation. On the basis of interference analysis, the problems were identified and the model was improved. Finally, the paper has developed a model which can meet the design requirement and make a reference for its optimal dynamic design.Key words: Cycling Equipment, Pro/Engineer, Modeling目录1 绪论 (1)1.1 课题背景及研究意义 (1)1.2 健身器材的研究现状 (1)1.1.1 健身器材的发展与品牌化 (1)1.1.2 健身器材的分类与功能 (2)1.3 现代机械设计方法概述 (3)1.4 本文主要研究内容 (3)2 Pro/E的功能概述 (5)2.1 Pro/E的三维模型创建功能 (7)2.2 Pro/E建模的一般过程 (7)3 基于Pro/E的健骑机建模 (9)3.1健骑机的结构分析 (9)3.2健骑机的建模过程 (12)3.3生成虚拟样机 (14)4 基于Pro/E的健骑机的运动仿真 (16)4.1 机构组件的确定 (16)4.2 运动仿真分析 (17)4.2.1 仿真动画的生成 (17)4.2.2 仿真分析 (18)5 结束语 (21)致谢 (22)参考文献 (23)1 绪论1.1 课题背景及研究意义随着人们生活水平的不断提高和科学技术的快速发展,地球人的健身意识越来越强,进行户外运动和室内健身已经成为人们日常生活中必不可少的一个内容。
基于刚柔耦合模型的卡扣机构动力学仿真分析

基于刚柔耦合模型的卡扣机构动力学仿真分析王冰冰;林木;王月婷【摘要】The paper establishes a snap-in mechanism rigid coupling model by the ADAMS,which is used to accurately and truly reflect the movement of the snap-in mechanism and analyzes the dynamics and multi-body model of the lifts and the snap-in mechanism.Through the analysis,it is found that significant fluctuation exists in the velocity and acceleration curves,when the displacement curve of the rigid coupling model remains unchanged and its reason is analyzed.The guiding direction is provided for further optimizing the mechanism.%运用ADAMS建立了卡扣机构刚柔耦合模型,准确并真实地反应出了卡扣机构的运动情况,将升降台和卡扣机构动力学特性与多刚体模型进行对比分析.通过分析发现,基于刚柔耦合模型下升降台和卡扣机构在位移曲线保持不变的情况下,工作时的速度、加速度曲线有明显波动,并通过分析波动的原因,为机构的进一步优化提出了指导方向.【期刊名称】《机械制造与自动化》【年(卷),期】2017(046)001【总页数】5页(P103-106,123)【关键词】ADAMS;动力学仿真;刚柔耦合【作者】王冰冰;林木;王月婷【作者单位】大连海洋大学应用技术学院,辽宁大连116300;大连海洋大学应用技术学院,辽宁大连116300;大连海洋大学应用技术学院,辽宁大连116300【正文语种】中文【中图分类】TH113.2+2在以往的机构动力学仿真研究中,一般将机构系统作为刚性体来对待,其各个构件都属于刚体,在力的作用下不会反映出弹性变形,这种把构件当做刚体系统来处理,在大多数的情况下是可以满足精度要求的,但是在考虑构件变形的情况下完全将构件考虑成刚性体来处理不能达到精度的要求。
大范围运动刚柔耦合系统动力学建模与仿真

大范围运动刚柔耦合系统动力学建模与仿真随着科技的不断发展,机器人技术在各个领域得到了广泛的应用。
机器人的运动控制是机器人技术中的一个重要研究方向。
在机器人的运动控制中,刚柔耦合系统动力学建模与仿真是一个重要的研究方向。
刚柔耦合系统是指由刚体和柔性结构组成的系统。
刚体是指具有固定形状和大小的物体,而柔性结构则是指具有一定弹性的物体。
刚柔耦合系统的动力学建模与仿真是指对这种系统进行数学建模和仿真分析,以便更好地理解和控制这种系统的运动。
在刚柔耦合系统的动力学建模中,需要考虑刚体和柔性结构之间的相互作用。
这种相互作用可以通过建立刚柔耦合系统的动力学模型来描述。
动力学模型可以用来预测系统的运动轨迹和响应。
在建立动力学模型时,需要考虑系统的质量、惯性、弹性和摩擦等因素。
在刚柔耦合系统的仿真分析中,可以使用计算机模拟的方法来模拟系统的运动。
计算机模拟可以帮助研究人员更好地理解系统的运动特性,并预测系统的响应。
在进行仿真分析时,需要考虑系统的初始状态、外部扰动和控制策略等因素。
刚柔耦合系统的动力学建模与仿真在机器人技术中具有广泛的应用。
例如,在机器人的运动控制中,刚柔耦合系统的动力学建模和仿真可以帮助研究人员更好地理解机器人的运动特性,并设计更有效的控制策略。
此外,在机器人的设计和制造中,刚柔耦合系统的动力学建模和仿真也可以帮助研究人员更好地理解机器人的结构和性能,并优化机器人的设计。
刚柔耦合系统的动力学建模与仿真是机器人技术中的一个重要研究方向。
通过建立动力学模型和进行仿真分析,可以更好地理解和控制刚柔耦合系统的运动特性,从而为机器人技术的发展提供有力的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ab s t r a c t : T o a c c u r a t e l y d e s c r i b e t h e p e 咖r
e o f c  ̄l i n g e q u i p m e n t i n i t s w o r k p r o c e s s ,b se a d o n t h e t h e o r y f o r d —
Ri g i d — Fl e x i b l e Co u p l e d Dy n a mi c s Si mu l a t i o n o f Cy c l i n g E q u i p me n t
T I AN Ha i - b o ,S HANG Wa n - f e n g , L I Ai - mi n ( C o l l e g e o f Me c h a n i c a l E n g i n e e r i n g , X i ’ a n U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , S h a a n x i X i ’ a n 7 1 0 0 5 4 , C h i n a )
机 械 设 计 与 制 造
2 22
Ma c h i n e r y De s i g n
&
Ma nu f a c t u r e
第 9期 2 0 1 4年 9月
健骑机 刚柔耦合动 力学仿 真分析
田海波 , 尚 1 0 0 5 4 )
明, 与 多刚 体 模 型 相 比 , 刚 柔耦 合 模 型 的仿 真 结果 能更 准确 地 反 映 健 骑 机 实 际工 作 时 的动 态性 能 , 提 高健 骑 机 的 结 构
设 计 效 率。
关键词 : 健骑机 ; 刚柔耦合 ; 模态分析 ; 动力学仿真 中图分类号 : T H1 6 ; T P 3 9 1 . 9 文献标识码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 5 ) 0 9 — 0 2 2 2 — 0 4
l f e x i b l e c o u p l i n g s i m u l ti a o n w o u l d r e l f e c t t h e p e 咖r m 帆c e f o c  ̄l i n g e q u i p en m t i n i s t w o r k p r o c e s s m o r e a c c u r t a e l y , w h i c h
摘
要: 为准确描 述健骑 机在工作过程 中的性 能 , 基 于刚柔耦合 理论 , 联合 运用 A D A MS和 A N S Y S 软件 , 分析健骑 机
的动 力学问题。首先完成健骑机 多刚体 简化模型的动力学仿真 。应用 A N S Y S计算 了健骑机底座的模 态和谐响应等动 力学特性 。在 A D A MS中将底座视 为柔性体进行健骑机 的动力学仿真 , 并与 多刚体动力学仿真结果对比分析 。结果表
le f x i b l e c o u p l i n g d y n a mi c s ,t h e d y n mi a c s s i m u l a t i o n f o c y c l i n g e q u i p m e n t i s d o n e b y u s i n g t h e s 凹e o f A D A MS a n d A N S Y S .T h e yn d mi a c s i mu l ti a o n f o t h e a l l — r i g i d — b o y d m o d e l f o r c  ̄l i n g e q u i p m e n t h a s b e e nf in s i h e d .T h e m o d a l a n d h a r m o n i o u s r e 印0 e ft o h e c  ̄l i n g e q u i p me n t ’ S p e d e s t a l i s a n a l y z e d i n A N S Y S . C o n s i d e r i n g t h e p e d e s t l∞ a a le f x i b l e b o , t h e d y n mi a c s s i mu l ti a o n o f t h e c  ̄l i n g e q u i p m e n t i s p e  ̄ C o r m e d i n A D AM S . A f t e r t h t, a t h e s i mu l ti a o n d t a a h a s b e e n c o m p a r e d