制育秧钵机设计
水稻钵苗取秧摆秧机构及传动系统设计
开题报告项目名称:水稻钵苗取秧摆秧机构及传动系统设计项目来源:自拟项目起止日期:2014 年12 月15 日至2015 年7 月 3 日项目类型:工程设计立题的目的和意义简介:随着农业技术的进步,钵苗移栽技术得到广泛推广及运用。
与传统育秧方式相比,钵苗育秧有以下优点:一.由于钵苗育秧带营养体培养,所以种子成活率高。
二.采用专门的播种器,与传统洒秧相比,播种效率更高。
三.育苗周期缩短,研究表明在寒冷地区只需35到40天。
四.移栽方便且不易损坏秧苗,专业的搬运工具,使搬运秧苗更加快捷方便。
五.更能适应农业机械化趋势的要求,秧盘的标准化,更适合使用移栽机等机械设备。
由于钵苗育秧的推广,所以对钵苗移栽机技术的需求也越来越迫切。
以日本为例,乘坐式插秧机有经历了三代产品的变革。
第一代插秧机:将插秧机构装在四轮驱动的车体上,制造出乘坐式洗苗插秧机和毯状苗插秧机。
第二代产品:插秧机构主要采用连杆机构,在曲柄上加配重,增加了分插频率。
第三代产品:由于连杆机构无法完全克服离心力的缺陷,导致了它无法实现高速分插.性能更加优越的行星轮系分插机构逐渐取代了曲柄连杆机构,运用于高速插秧机。
为了赶上日本等先进国家的技术,我国插秧机研究迫在眉睫,尤其是对非圆齿轮机构分插机构的研究。
这既是实现农业现代化的要求,也是发展粮食产业的客观需求。
项目的技术指标与要求:技术指标生产率:200-250株/min株距:130mm秧苗高:200mm轨迹高度:260-310mm要求1确定取秧、摆秧及其传动方案;2为满足技术指标,通过仿真计算确定机构、结构有关参数;3 按技术指标确定传动系统及运动参数;4 完成取秧机构、摆秧机构及传动系统的设计;5撰写毕业设计说明书。
项目的进度安排:2014/12/15-2015/01/08 查阅资料并准备开题报告2015/01/09-2015/04/14 建立取秧摆秧机构及传动系统仿真模型2013/04/15-2013/05/10 完成取秧器及非圆齿轮机构的设计2015/05/11-2015/05/31 完成滑道及摆秧机构的设计2015/06/01-2015/06/30 完成论文并准备答辩同组设计者及分工:独立完成指导教师签字:年月日教研室主任意见:同意教研室主任签字:年月日摘要椭圆齿轮具有广泛的运用,其中在椭圆齿轮分插机构中极具代表性。
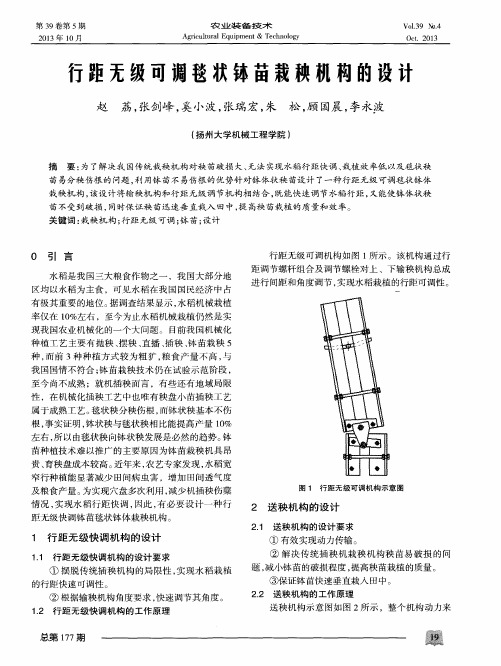
行距无级可调毯状钵苗栽秧机构的设计
一
\ - 7 1 . -
}
d
j {
{
I
/
下 皮带 滚轮 I 通 过 皮带 带 动 下皮 带 滚轮 Ⅱ转 动 , 两 条平 行 同步齿 形带 之 间的 间距 以及 与地 面的夹 角通
过行 距 调节螺 杆组 合 、 行距 调节 槽孑 L 板 调节 。
2 送 秧 机 构 的设 计
2 . 1 送 秧机构 的设计 要 求
1 行 距 无级 快 调 机 构 的 设 计
1 . 1 行 距 无级 快调 机构 的设 计要 求
① 有 效 实现 动力传 输 。
② 解决传统插秧机栽秧机构秧苗易破损 的问 题, 减小钵苗的破损程度 , 提高秧苗栽植的质量。 ③ 保证 钵苗 快 速垂直 栽人 田中 。
.
一
1 2 2 2 2 1
3 输 秧 机 构 整体 设计
输 秧机 构 如 图 3所 示 , 1台栽 秧 机 配 有 3对 输
1 . 上送秧机 架 2 . 上送秧机架 紧同杆 4 . 行距调节槽孑 L 板 5 . 上 送 秧 机 构 连接 板 l 2 . 下送秧机架
—
卜
3 . 行 距 涮 节 螺 杆 组 合 6 . 紧 固螺 栓 组 合 1 3 . 上 皮带 滚 轮 I
( 扬州 大学 机械 工程 学 院 )
摘
要: 为 了解 决我 国传 统 栽秧机 构 对秧 苗破 损 大 、 无 法 实现 水稻 行距 快调 、 栽植 效 率低 以及 毯状秧
苗 易分秧 伤根 的 问题 , 利 用钵 苗不 易伤根 的优 势针 对钵体 状秧 苗设 计 了一种 行距 无级 可调毯 状钵 体 栽秧 机 构 , 该 设计 将输秧 机 构和行 距 无级调 节机 构相 结合 , 既能 快速调 节 水稻行 距 , 又能使钵 体状 秧
水稻钵育秧盘起盘机的设计和试验研究
水稻钵育秧盘起盘机的设计和试验研究/h11.1 研究的目的和意义水稻是我国最主要的粮食作物之一,总产量约占我国粮食总产量的百分之四十。
相比较而言,水稻是比玉米和小麦更加具有经济效益的粮食作物;水稻的种植技术以及生长环境相对复杂,生产过程涉及环节流程多,种植的季节性强,并且水稻全程生产过程中所需的用工量多、劳动强度大。
中国是世界上最大的水稻生产和消费国,水稻生产不仅负担着确保国家粮食安全的重任,也肩负着实现种粮增效、稻农增收和推进新农村建设的重要使命,同时也是现阶段中国农业和农村经济发展的重心任务之一。
黑龙江省位于我国的东北部,是中国位置最北、纬度最高的省份。
黑龙江属中温带到寒温带的大陆性季风气候,年平均气温在-4~5℃。
黑龙江土地肥沃,有机质含量高,是世界三大黑土地带之一,是名副其实的国家粮食主产区。
2013 年黑龙江省粮食种植面积为20 913.1 万亩,总产量跃上 1 200 亿斤新台阶,比上年增加48.5 亿斤,增长 4.2%,再获特大丰收。
黑龙江适合种植水稻、玉米、大豆、小麦四种粮食作物。
尤其是黑龙江的粳稻全国闻名,品质优良,口感好,备受人们青睐,需求呈扩大的趋势。
近些年来,随着城市化脚步的加快以及农村耕地面积的逐渐减小,加之农村的主要青壮劳动力流向城市务工以及农用物资、生产原料的成本上涨等原因,以往的水稻育秧生产模式已经落后。
随着国家对“三农问题”的关注以及对农业扶持力度的逐年加大,我国水稻生产模式将发生变革。
因此,推广使用简单,省力,省人工的技术模式,对水稻全程机械化生产模式的推广建设起着重要作用。
1.2 国内外相关机械的研究在农业生产的各项环节中,使用机械作业代替人力作业,实现全程机械化作业,已经成为全世界各国的研究趋势,但由于现阶段农艺与农机的相互配合的程度以及机械设备的发展水平相对较低,使得全程机械化作业的发展受到制约。
同时由于国内外农业机械化水平存在着差异,特别是国内的水稻种植培育模式正处于更新换代的阶段,相应的配套机械还未完全适应新的生产模式。
2BYZ-2型钵苗移栽机设计
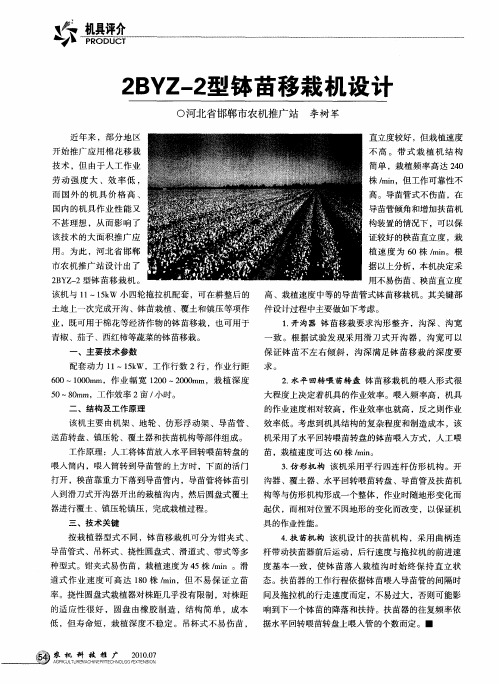
具 的作业性能。
按栽 植器型式不 同 ,钵苗移栽 机可分 为钳夹 式 、
4 扶 苗机构 该机设计 的扶苗机构 ,采用 曲柄连 .
导苗管式 、吊杯式 、挠性 圆盘式 、滑道式 、带式等多 杆带动扶苗器前后运动 ,后 行速度与拖拉机 的前进速 种型式 。钳夹式 易伤 苗 ,栽 植速度为 4 株 / i 。滑 度基 本一 致 ,使 钵 苗落入 栽植 沟 时始终 保持 直 立状 5 mn
业 ,既可用于棉花等经济作物的钵苗移栽 ,也可用 于
青椒 、茄子 、西红柿等蔬菜的钵苗移栽 。
一 一
1 开沟器 钵 苗移栽 要求 沟形整齐 ,沟深 、沟 宽 .
致 。根据试 验发 现采 用滑 刀式 开沟 器 ,沟宽 可 以
、
主要技术参数
保 证钵苗 不左 右倾 斜 ,沟深 满足钵 苗移 栽 的深度 要
高。导苗管式不伤苗 ,在 导苗管倾角和增加扶苗机 构装置 的情况下 ,可以保 证较好 的秧苗直立度 ,栽 植速度为 6 0株 / i。根 mn
劳 动强 度 大 、效 率 低 ,
而 国外 的机 具 价 格 高 、 国 内的机 具作业 性 能又
不 甚理想 ,从 而影 响了 该 技术 的大面积 推广应
大程度上决定着 机具 的作业效 率。喂人频 率高 ,机具 的作业 速度相对 较高 ,作业效 率也 就高 ,反 之则作业
机采用 了水平 回转 喂苗转盘 的钵苗喂人 方式 ,人工 喂
该机 主要 由机架 、地轮 、仿形 浮动架 、导苗 管 、 效 率低 。考虑 到机具结 构的复杂程度 和制造 成本 ,该
低 ,但 寿命短 ,栽植 深度不稳 定 。吊杯式不 易伤苗 , 据水平 回转喂苗转盘上喂人管 的个数而定 。■
机械毕业设计1683制育秧钵机设计说明书
目录1 绪论1.1 选题的目的和意义 (3)1.2 本课题在国内外的研究状况 (3)1.3 课题研究的内容及拟采取的技术、方法 (4)2 育秧钵机的用途和设计要求2.1 用途 (5)2.2 设计要求 (5)3 方案确定3.1 工艺分析 (7)3.1.1最早的手工制秧钵的方法 (7)3.1.2运动机构 (9)3.1.3对各运动机构的要求 (10)3.2 拟定机器的工作原理图和运动循环图 (11)3.3 方案确定 (12)3.3.1模孔转盘方案的讨论 (13)4 运动设计与动力计算4.1 电动机的选择 (15)4.1.1电动机的功率确定 (15)4.1.2选择电动机 (16)4.2 确定各传动机构的传动比 (16)4.3 计算各轴的转速和功率 (17)5 结构设计5.1 模孔转盘齿轮结构 (19)5.2 转盘齿轮的结构和尺寸 (19)5.3 曲柄(偏心轮)滑块(滑杆)机构的设计 (20)5.4 锥齿轮的结构和尺寸设计 (23)5.5 直齿圆柱齿轮的结构 (26)5.6 带轮的的结构设计 (27)5.7 轴的结构设计 (29)5.8 绘制总装配图 (30)6 主要零件的强度效核6.1 转盘齿轮核对 (32)总结 (33)毕业心得 (34)参考文献 (35)致谢 (36)1 绪论1.1 选题的目的和意义育秧钵机是一种自动生产秧苗钵体的机械设备。
可用于制作圆柱形带种籽孔的棉花、玉米、瓜果、花卉以及中草药等多种蔬菜农作物育苗用营养钵。
秧苗用钵体培育后移栽,能保证秧苗质量,达到早育、早熟、早上市、稳产、高产的目的,还可节省劳力、种子肥料、农药。
同时,该设备生产效率高,结构简单,稳固可靠,容易操作。
是现代农业生产必不可少的工具。
中国是世界最大的蔬菜生产国,蔬菜产量占世界总产量的60%左右。
我国蔬菜栽植机械的发展较慢,秧苗栽植几乎全部由人工完成,不仅劳动强度大、生产效率低,而且栽植质量差、生产成本高。
显而易见,实现蔬菜农作物栽植机械化已成为农业生产的迫切需要。
RP-1000型水稻植质钵育秧盘成型机设计与试验
插秧机秧箱进给轮配合使用 以便实现 自动进给,又 可以减轻植质钵育秧盘整体重量 。
1 压力 系统 ;2 成型模具 ;3 控制系统 一 - -
1 r s u es se 2 -P e s r y t m; -Mo l i g 3 Co to y t m u d n ; - n r ls s e
中图分类号 :2 31 2.
文献标 志码 :A
文章编号 :1 0 — 3 9 2 l ) 8 0 6 — 5 0 5 9 6 ( 0 2 O — 0 3 0
De in a d e p r n n sg n x e i me to RP 0 y e f r ig ma hn o h ie -1 0 tp o m n c ie f rte r 0 c s e l g g o n r y ma e o a d - t w/H N a l g Z A GXnu, N e di - r wig t d f d y sr Z A GY na , H N i e WA G n a p a i n y
图 2 R - 00型水 稻 植 质 钵 育秧 盘 成 型 机 P 10
Fi . Fa r c tn c i e y o es e l g g o n a g2 b i a i g ma h n r f h d i - r wi g t y t e n r
ma eo a d - t a f rc mp e so l i g d f d y sr w o r s i n mo d n p o
F g 1 S u r e d i g t a i . —+ 到排 气次数 —+保压 硫化 ( 达 初压 ) 排气 上升
硫化 计 时
开模取 出制 品 ・ 一滑块上 升
Solidworks钵育水稻栽秧机纵向进给机构的三维设计
摘要本文根据目前我学院插秧机的研究现状,结合国内外插秧机进给机构,提出两套纵向进给机构的设计与仿真。
使用专业CAD软件SolidWorks先按照预定的轨迹,设计出进给机构。
然后根据机构设置具体零件,再装配调试,并最终得到两套设计方案。
使用SolidWorks分别建立两套方案的装配文件及爆炸视图。
分别对两套进给机构进行Animator仿真与COSMOSMotion仿真,最后使用COSMOSMotion分析整个设计机构,提出分析意见。
本设计需要用SolidWorks Office Premium(SW完全版 3.42GB)才能进行COSMOSMotion 仿真,文中多处介绍COSMOSMotion仿真工具的用法。
要完美的模拟仿真,还要用到 Framework 2.0和DirectX 9.0c。
本设计是以我学院自行设计的插秧机基础进行研究的,许多基础数据来自假设。
设计结果仅作为插秧机进给机构的一种参考。
关键词:进给机构,插秧机,动画仿真,SolidWorks目录1. 绪论.............................................. - 1 -1.1 选题的意义................................... - 1 -1.2 插秧机进给机构研究的现状..................... - 1 -1.2.1 纵向进给机构的结构设计................. - 1 -1.2.2 纵向进给机构的工作原理................. - 2 -1.2.3 双向螺旋进给机构的设计................. - 3 -1.2.4 学院知识产权现状....................... - 4 -1.3 研究插秧机进给机构的步骤..................... - 4 -1.4 论文的主要研究方法........................... - 5 -2. SOLIDWORKS动画仿真与运动分析简介................. - 5 -2.1 产品数字化变革与仿真设计发展................. - 5 -2.2 SOLIDWORKS简介.............................. - 7 -2.3 ANIMATOR插件功能及特点...................... - 8 -2.4 模拟工具简介................................. - 9 -2.5 COSMOSMOTION基本知识........................ - 9 -3.插秧机纵向进给机构设计............................ - 12 -3.1 要解决的问题:.............................. - 12 -3.2 解决方案分析................................ - 12 -3.2.1 初步分析.............................. - 12 -3.2.2 具体分析.............................. - 12 -3.3 直线型从动摆臂机构的设计(方案1).......... - 13 -3.3.1设计的前提条件........................ - 13 -3.3.2 机构原理图及运动分析.................. - 13 -3.3.3 直线型从动摆臂机构主要零件的设计...... - 14 -3.3.4 直线型从动摆臂机构的装配关系.......... - 21 -3.4 圆弧型从动摆臂机构的设计(方案2).......... - 24 -3.4.1 设计的前提条件........................ - 24 -3.4.2 机构原理图及运动分析.................. - 24 -3.4.3 圆弧型从动摆臂机构主要零件的设计...... - 25 -3.4.4圆弧型从动摆臂机构的装配关系.......... - 27 -4. 插秧机进给机构的动画仿真与运动分析............... - 28 -4.1 直线型从动摆臂机构动画仿真.................. - 28 -4.1.1 直线型从动摆臂机构的ANIMATOR仿真..... - 28 -4.1.2 直线型从动摆臂机构的COSMOSMOTION分析. - 30 -4.2 直线型从动摆臂机构动运动分析................ - 33 -4.3 圆弧型从动摆臂机构动画仿真.................. - 34 -4.3.1 圆弧型从动摆臂机构的ANIMATOR仿真..... - 34 -4.3.2圆弧型从动摆臂机构的COSMOSMOTION分析. - 34 -4.4 圆弧型从动摆臂机构动运动分析................ - 35 -4.5 方案1与方案2对比分析...................... - 36 -4.6结论........................................ - 37 -5.结束语............................................ - 38 - 参考文献............................................ - 39 -1. 绪论1.1 选题的意义水稻是我国种植面积最大、单产最高、总产最多的主要粮食作物,其常年种植面积和总产约占我国粮食作物的28%和40%,种植方式主要为传统的人工插秧。
ZB_3000型育苗制钵机传动系统的设计_李可20110828
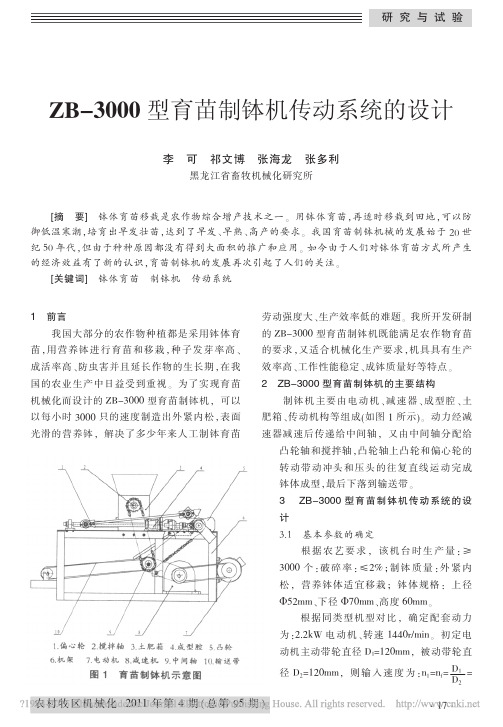
1.偏心轮2.搅拌轴3.土肥箱4.成型腔5.凸轮6.机架7.电动机8.减速机9.中间轴10.输送带图1育苗制钵机示意图研究与试验ZB-3000型育苗制钵机传动系统的设计李可祁文博张海龙张多利黑龙江省畜牧机械化研究所[摘要]钵体育苗移栽是农作物综合增产技术之一。
用钵体育苗,再适时移栽到田地,可以防御低温寒潮,培育出早发壮苗,达到了早发、早熟、高产的要求。
我国育苗制钵机械的发展始于20世纪50年代,但由于种种原因都没有得到大面积的推广和应用。
如今由于人们对钵体育苗方式所产生的经济效益有了新的认识,育苗制钵机的发展再次引起了人们的关注。
[关键词]钵体育苗制钵机传动系统1前言我国大部分的农作物种植都是采用钵体育苗,用营养钵进行育苗和移栽,种子发芽率高、成活率高、防虫害并且延长作物的生长期,在我国的农业生产中日益受到重视。
为了实现育苗机械化而设计的ZB-3000型育苗制钵机,可以以每小时3000只的速度制造出外紧内松,表面光滑的营养钵,解决了多少年来人工制钵育苗劳动强度大、生产效率低的难题。
我所开发研制的ZB-3000型育苗制钵机既能满足农作物育苗的要求,又适合机械化生产要求,机具具有生产效率高、工作性能稳定、成钵质量好等特点。
2ZB-3000型育苗制钵机的主要结构制钵机主要由电动机、减速器、成型腔、土肥箱、传动机构等组成(如图1所示)。
动力经减速器减速后传递给中间轴,又由中间轴分配给凸轮轴和搅拌轴,凸轮轴上凸轮和偏心轮的转动带动冲头和压头的往复直线运动完成钵体成型,最后下落到输送带。
3ZB-3000型育苗制钵机传动系统的设计3.1基本参数的确定根据农艺要求,该机台时生产量:≥3000个:破碎率:≤2%;制钵质量:外紧内松,营养钵体适宜移栽;钵体规格:上径Φ52mm、下径Φ70mm、高度60mm。
根据同类型机型对比,确定配套动力为:2.2kW电动机、转速1440r/min。
初定电动机主动带轮直径D1=120mm,被动带轮直径D2=120mm,则输入速度为:n1=n f=D12=ÁÂÃÄÅÆÇÈÉÁ144×120120=1440r/min式中:n f-电动机转速n1-制钵机输入转速D1-主动带直径D2-被动带直径本机传动系统主要是起到传递动力到执行件和减速的作用,使其实现速度和运动形式的转变,使执行机构完成预定运动。