船舶六自由度解析图
船体装配识图详解

粗虚线
不可见板材简化线
轨道线
主船体结构图内不可见水密板材 简化线
细虚线
1. 不可见轮廓线 2. 不可见次要构件的简化线
粗点划线 1.可见主要构件的简化线 2.钢索、绳索、链索的简化线
细点划线
1. 中心线 2. 可见次要构件的简化线 3. 开口对角线 4. 转圆线 5. 液舱范围线 6. 折角线
粗双点划线 不可见主要构件的简化线
我公司的船体结构分段代码如下: ⑴. 分段的代码:
分段横向位置代码 分段数量顺序代码 分段层次代码 分段构造代码 结构区域代码
⑵. 构区域代码
区域名称
代码
货舱区域
前部货舱 后部货舱
H(CARGO HOLD) C(CARGO HOLD)
机舱区域
E(ENGING ROOM)
首部区域
F(FORE PART)
其分布情况。 3) 外板、内底板和甲板板的横向排列及其厚度。 4) 主机基座的结构形式、大小、数量以及主轴中心线距基线的高度。 5) 上层建筑纵围壁的位置、板厚及扶强材的大小和结构形式。 6) 舱口的宽度以及舱口围围板的大小和结构形式。 7) 双层底、船舱和各甲板间舱的高度和甲板梁拱值。
5. 船体构件理论线 船体构件理论线就是在船体建造时船体构件安装的定位线,因此,只有在完全读懂构件理论线,
上层建筑分段层次代码
层次名称
代码
备注
上甲板面上第一层上层建筑
1
上甲板面上第二层上层建筑
2
以上甲板面上第
上甲板面上第三层上层建筑 上甲板面上第四层上层建筑
3
一层上层建筑为
4Байду номын сангаас
第一层,按结构布
上甲板面上第五层上层建筑
船舶拖航系统六自由度操纵运动仿真

船舶拖航系统六自由度操纵运动仿真船舶拖航系统六自由度操纵运动仿真船舶拖航系统是一种重要的海上运输设备,在海上货物运输中起到了非常关键的作用,而如何提高船舶拖航系统的操控能力是当前研究的热点。
船舶拖航系统的操纵运动仿真是一种非常有效的工具,可以模拟出各种不同的船舶拖航运动,对于提高系统的操纵能力具有重要意义。
船舶拖航系统的六自由度操纵运动是指在三个轴向分别进行平移和旋转的运动。
这六个自由度是:横向平移、纵向平移、垂直平移、绕X轴旋转、绕Y轴旋转和绕Z轴旋转。
在实际操作中,船舶拖航系统的操纵运动非常复杂,需要通过软件仿真来模拟出各种不同情况下的运动模式。
实现船舶拖航系统六自由度操纵运动仿真需要使用专业的仿真软件,如MATLAB/Simulink、ADAMS等。
这些软件具有良好的仿真性能和精度,可以精确地模拟出船舶拖航系统的各个运动指标。
以MATLAB/Simulink为例,其基于多体动力学理论,可以对船舶拖航系统进行六自由度动力学仿真,包括运动方程、力学方程和动力学方程等。
在进行船舶拖航系统六自由度操纵运动仿真时,需要考虑各种常见因素,并对其进行参数设置。
通常需要设置船舶的结构参数、物理参数、环境参数和控制参数等,以便精确地进行仿真分析。
其中结构参数包括船舶的长、宽、高等尺寸信息;物理参数包括船舶的质量、重心、惯性矩等;环境参数包括海洋水流、波浪等外部环境影响;控制参数包括船舶的操纵系统和控制策略等。
在仿真系统中,可以使用多种不同的仿真模式,如驱动模式、跟踪模式和预演模式等。
驱动模式是指在实际操纵情况下,通过对船舶各项指令进行控制,模拟出其对应的运动模式。
跟踪模式是指模拟出船舶跟随目标物体进行拖航操作的情况。
预演模式是指在不同环境条件下,模拟出船舶在某些特殊情况下的运动模式,以便用于系统优化和改进等方面。
总之,船舶拖航系统六自由度操纵运动仿真是一种非常重要的技术手段,对于提高船舶拖航系统的操纵能力具有重要意义。
船舶操纵性
固定坐标系中船舶六自由度操纵运动方程:
. m(u . vr wq ) X H X R X P X 1W X 2W m(v ur pw) YH YR YP Y1W Y2W . m( w uq vp) Z H Z P Z1W Z 2W . I xx p K H K R K P K1W K 2W . I yy q ( I xx I zz ) pr M H M P M 1W M 2W . I zz r ( I yy I xx ) pq N H N R N P N1W N 2W
回转直径:
D
2U 0 2U 0 r K r
k为舵效系数
L2 d 最小回转直径: D 10 AR
2) 战术直径 DT
船舶首向改变180度时,其重心距初始直线航线的横向距离
4) 正横距 l B
转舵开始点到首向角改变90度时重心横移 的距离
DT (0.9 ~ 1.2) D
3) 进距 l A
Cw 为水线面系数
桨力
桨推力减额系数: 推力系数:
进速系数:
(汉克歇尔公式估算)
舵力
(1)
tR
为舵阻力减额系数
(2) 舵的正压力: a) f 的计算:
f a 为舵的法向力系数, 为舵的展弦比 ,
(芳村模型) (船舶机动时舵处的伴流系数)
2 b)U R (有效来流速度)的计算:
v为船舶瞬时速度,
非线性流体动力:
为展弦比,
3)转船流体动力 采用井上模型:
a) b) c)
d) e)
f)
为首尾吃水差
4)横摇流体动力矩
船舶种类的介绍PPT课件全文

分节驳顶推船队
• 二、海上顶推船队
• 分为非整体式、半整体式和整体式三种。
• 1.非整体式(亦称非固定式)
• 此种方式对水平方向的控制比较稳定,而对上 下方向及横摇、纵摇等运动不加控制,所以耐 波性较差,主要用于航距较短、风浪较小的沿 海航线。属于此种联结方式的有:
• 1、推架式
2、顶棍式
•3、靠球式
• (3)顶推船队的吃水较浅,可用于江海直达运输,避免 货物在港口的换装转运,从而提高经济效益。
捆绑 船队
•大 运 河 拖 带 船 队
第五节 客 船
• 一、普通客船 • 1、客船 • 是指专运旅客、行李、邮件及少量需迅
速递运货物的船; • 客货船是指兼运旅客及货物的船。 • 发展方向:长途旅游化,短途高速化(其他
4、浅槽与深槽式
半整体式 :
• 推参与驳船通过左右两个销子相联结,仅 允许相对相对纵摇的一个自由度,改善了 适航性能,克服了非整体式中在海况恶化 是需改为拖航的缺点,在近海和远洋均可 航行。
第三章
• 整体式 :
• 整体式联结方式是把推船与驳船完全刚性的 联结在一起,六个自由度的运动完全加以控 制,形同一艘船。故其抗风浪能力近似于自 航货船。
船舶种类
干散货船舶
干散货船是指专门载运粉末状、颗粒状、块状等非包装散 堆货的运输船舶。如运输粮食、矿砂、煤炭、水泥等
现代普通散货船较典型的横舯剖面形式图
货舱截面 呈八角形, 上下分设 顶、底边 舱
煤炭装船
30万吨级矿砂船
散装水泥船
散装水泥船
大舱口散货船
好望角散货船
17.5万吨散货船
17.4万吨散货船
船体结构与制图第三章总布置图(下)
PPT学习交流
请参考教材附图
6
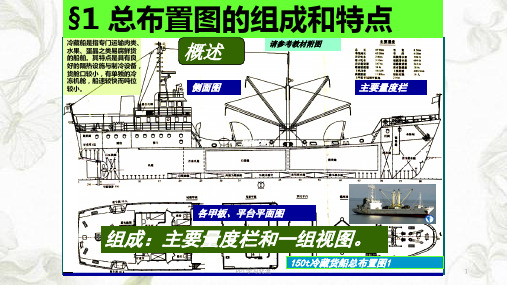
下面复习各甲板名称为接下来学习总布置图作准备:
船长甲板
艇甲板 尾甲板室甲板
上甲板
罗经甲板 驾驶甲板
上甲板
下甲板
下甲板
某杂货船
PPT学习交流
7
首楼甲板
某成品油船
150t冷藏货船
练习1
C? B?
A? 主甲板
罗经甲板 驾驶甲板
1000t沿海货船
船员人数、甲板间高、肋骨间距
等。
150 DWT冷藏货船主要量度栏
例一
主要量度栏中列有说明 船舶技术、经济性能的一 组数据,通常布置在图纸 的右上方。
PPT学习交流
例二 12
二、总布置图的视图 1、侧面图(主视):
从右舷向V 面投影。
对于舱室和设备较多的船舶,如舰艇、 大型客船等,为了比较清晰地表示船体内部的 布置,常以中纵剖视图代替侧面图,甚至两图 同时画出,以便清晰明了地表示船舶总体布置 情况。中纵剖视图是以中线面剖切船体后向V 投影面投影所得的剖视图。为了使图面清晰而 且表达方便,规定各种设备不论是否被剖切, 在图中一律画其轮廓投影。 PPT学习交流
总布置图中还对机械、设备、用具、门、窗、扶梯等采用了 形象化的图形符号,以保证图面清晰。图形符号的尺寸没有具 体规定,画图时,需要根据欲表达的设备、家俱等的外形尺寸 按比例绘制。图形符号由《舶舶布置图图形符号》具体规定。 常用的图形符号见表2-3-1。标准中规定的基本图形符号还可 以与其它图形符号组合使用。凡是国家标准中未提到的各种特 殊设备等,可用与其实际形状相似的图形符号来表示。
(2)甲板或平台上,舱室外船舶设备、机械的布置情 况以及这些设备、机械在船长和船宽方向的位置。
船舶主要部位结构图

船舶主要部位结构图船舶部位名称船舶各部位名称如图所示。
船的前端叫船首(stem);后端叫船尾(stern);船首两侧船壳板弯曲处叫首舷(bow);船尾两侧船壳板弯曲处叫尾舷(quarter);船两边叫船舷(ships side);船舷与船底交接的弯曲部叫舭部(bilge)。
连接船首和船尾的直线叫首尾线(fore and aft line center line, centre line)。
首尾线把船体分为左右两半,从船尾向前看,在首尾线右边的叫右舷(starboard side);在首尾线左边的叫左舷(port side)。
与首尾线中点相垂直的方向叫正横(abeam),在左舷的叫左正横;在右舷的叫右正横。
船体水平方向布置的钢板称为甲板,船体被甲板分为上下若干层。
最上一层船首尾的统长甲板称上甲板(upper deck)。
这层甲板如果所有开口都能封密并保证水密,则这层甲板又可称主甲板(main deck),在丈量时又称为量吨甲板。
少数远洋船舶在主甲板上还有一层贯通船首尾的上甲板,由于其开口不能保证水密,所以只能叫遮蔽甲板(shelter deck)。
主甲板把船分为上下两部分,在主甲板以上的部分统称为上层建筑;主甲板以下部分叫主船体。
在主甲板以下的各层统长甲板,从上到下依次叫二层甲板、三层甲板等等。
在主甲板以上均为短段甲板,习惯上是按照该层甲板的舱室名称或用途来命名的。
如驾驶台甲板(b ridge deck)、救生艇甲板(life-boat deck)、等等在主船体内,根据需要用横向舱壁分隔成很多大小不同的舱室,这些舱室都按照各自的用途或所在部位而命名,如图1-18所示,从首到尾分别叫首尖舱、锚链舱、货舱、机舱、尾尖舱和压载舱等。
在货舱中两层甲板之间所形成的舱间称甲板间舱(tween dec k),也叫二层舱或二层柜。
看来这是以前设计的船,现在的船机舱基本在尾部。
中机型的效率不太好。
船舶部位、尺度和标志一、船舶各部位及舱室名称有关概念船首(head):船的前端部位。
船舶静力学基本原理

艏摇Yaw 纵摇Pitch
横摇Roll x
纵荡 Surge y
横荡Sway
吃水T: 龙骨上表面到静水面的垂向距离。
横倾角f:yoz平面内的角位移,右侧下沉为正。
纵倾角q: xoz平面内的角位移,船首下沉为正。
纵倾通常用纵倾值(艏艉的吃水差)来表示。
tanq=(TF-TA)/Lpp
常见的浮态的描述 • 正浮状态:横倾角f=0,纵倾角q=0 • 横倾状态:纵倾角q=0 • 横倾状态:横倾角f = 0 • 任意状态:
3.3 排水体积的横剖面积分
将船舶水下部分体积横向剖分:(纵倾状态)
L/2
L/2 T (x)
排水体积: = Asdx = dx 2ydz
-L / 2
-L / 2
0
浮心坐标:
横剖面面积
xB
=
1
L/2
xAsdx
-L / 2
T (x)
As = 2ydz
0
zB
=
1
L/2
zs Asdx
船舶在静水的力平衡方程为:
W = M trim = ltrim M heel = lheel
W:船体总重量; :排水量 Mtrim:纵倾力矩; Mheel:横倾力矩 ltrim:纵倾回复力臂 lheel:横倾恢复力臂
• 阿基米德原理:船舶的浮力等于船舶排开水的重量,浮力 作用点位于水下部分排水体积的形心位置。
-L / 2
=
1
L/2 T (x)
dx 2yzdz
-L / 2
0
横剖面关于 基线的静矩
T (x)
M soy= 2yzdz
0
3.4 等体积倾斜水线 ——倾角变化对浮心位置的影响
船舶操纵系统图解

船舶操纵系统第一节 操纵系统概述为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。
近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。
大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和远程控制。
随着自动化技术和电子技术的发展,各种遥控技术已广泛地应用于柴油机的操纵机构。
特别是近年来电子计算机技术和微处理机已用于主机遥控、巡回检测和工况监视等方面,不仅大大减轻了轮机人员的劳动强度,改善了工作条件,还可以避免人为的操作差错,提高船舶运行的安全性、操纵性和经济性。
目前,主机遥控技术水平越来越高,船舶正朝着全面自动化和智能化的方向发展。
一、对操纵系统的要求在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。
为了保证操纵系统能够可靠地工作,对船舶柴油机的操纵系统有下列基本要求:(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相应的要求。
(2)具有必要的连锁装置,以避免操作差错而造成事故。
起动连锁装置:盘车机未脱开不能起动,换向未到位不能起动。
换向连锁装置:转向与要求不符时不能起动,不允许在较高转速下换向,运转过程中不能自行换向。
滑油保安连锁装置:当滑油压力下降至许用下限值时,将油量调节杆推至零油位,使柴油机自行熄火停车。
(3)必须设有必要的监视仪表和安全保护、报警装置。
在操纵台(或遥控操纵台)上有转速、转向、气压、油压、水温等醒目的仪表,并对直接影响安全运行的有关压力和温度等置有报警装置和安全保护装置。
(4)操纵机构中的零部件必须灵活、可靠、不易损坏。