Kinematics
悬架运动学及柔顺性(K&C)试验介绍

悬架运动学及柔顺性(K&C)试验介绍时间:2011-05-16 11:55:09 来源:奇瑞汽车股份有限公司试验技术中心整车试验部戚海波薛志祥张珣本文主要介绍悬架运动学及柔顺性(K&C)试验台的结构组成、试验项目以及其在底盘开发中的应用。
【摘要】汽车操纵稳定性是汽车主要性能之一。
卓越的操纵稳定性能不仅大大提高了汽车主动安全性,更能给驾驶者带来驾驶乐趣。
随着我国汽车行业的迅猛发展,用户对汽车产品的性能要求不断提高,并越来越关注整车的操纵稳定性。
汽车的悬架运动学及柔顺性特性对整车的操纵稳定性水平具有决定性的影响,因此国际上各大汽车生产厂家及试验机构都通过购买悬架运动学及柔顺性参数测量设备来提升其在整车底盘设计和操稳调校方面的能力。
1. K&C试验台介绍悬架运动学及柔顺性试验台简称K&C试验台,主要用来测量悬架及转向系统的几何运动学(Kinematics)特性和各种受力情况下的柔顺性(Compliance)数据,这些特性和数据在很大程度上影响着整车的操纵稳定性水平。
K&C试验的基本原理就是向车辆的悬架系统施加一系列的载荷和位移输入。
对于准静态K&C试验,为了不激励起任何惯性、减振器或橡胶衬套引发的动态力,输入施加的速度很缓慢。
K&C试验台在此过程中测量大量的参数,通过这些参数可以得到与车辆悬架性能相关的主要参数,包括悬架刚度和迟滞,Bump Steer,Roll Steer,侧倾刚度,纵向和侧向柔性转向,以及转向系统特性。
对这些参数的理解对于彻底理解车辆的行驶性、平顺性、转向和操纵性具有决定意义。
K&C试验结果可以为ADAMS等CAE分析软件提供辅助验证,提高仿真的准确性,为设计和试验开发提供有力支持。
通过K&C试验、道路上的客观测量试验和主观评价试验的结果进行系统分析,我们可以找出车辆在操纵稳定性方面存在的问题以及问题的原因。
K&C双轴试验台2. K&C测试系统的主要结构悬架运动学和柔顺性测试系统包括四个主要的子系统:• 平台模块• 反力框架和车身夹持系统• 位置和负载传感器• 控制和仪表系统A. 平台模块双轴K&C试验台使用四个平台模块,以便于在各个车辆轮胎胎面施加位移或者作用力。
五轴设定
图2:控制轴号与伺服轴号的区别 19682——第1旋转轴轴方向
图3:旋转轴轴方向设定旋转轴旋转方向
图6:工作台第1旋转轴到工作台第2旋转轴交叉矢量
图7:五轴中心点测量STEP-1
工作台旋转轴上A 、B 点选取
轴旋转轴线上一点,B 点为C 轴旋转轴线上一点,为方便测量和计算,选取轴轴线上Y 位置相等,选取B 点为C 轴旋转轴线上工作台面位置。
图8:五轴中心点测量STEP-2
STEP-3 ZP1、ZB1、XB1坐标值测量
,测量B 点在Z 向的坐标ZP1(Z-)、工件上表面Z 向的坐标ZB1((X-)。
L L
Y+
Z+
A B
B 轴旋转中心线
C 轴旋转中心线
Y+
矢量AB 可以分成X 向和Z 向的分量,
Y 向重合。
ZP1(Z-)ZB1(Z-)
XB1(X-)
图9:五轴中心点测量STEP-3
YC2坐标值测量
度,测量工件Y+向侧面坐标YC1(Y+);
YC2(Y-)
YC1(Y+)
10:五轴中心点测量STEP-4
向侧面坐标XC2(X+)。
XC2(X+)
11:五轴中心点测量STEP-5
坐标值测量
向侧面坐标XB2(X+);
ZB2(Z-)
XB2(X+)
12:五轴中心点测量STEP-6 五轴中心点计算介绍:
B(X0->C
图15:旋转轴输出角度判定过程 以BC类型工具轴Z轴机床加以说明:
图17::1221#4=0时 G53.1执行前后两个旋转轴的旋转位置图18::1221#4=1时 G53.1执行前后两个旋转轴的旋转位置。
机器人学运动学分析_Kinematics
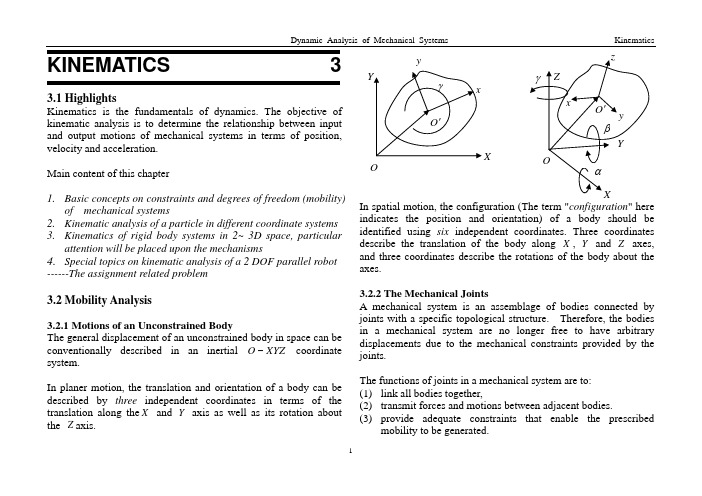
Dynamic Analysis of Mechanical Systems
Kinematics
Joints can be classified by the degrees of freedom allowed or restricted. The commonly used joints are listed in Table 1. 3.2.3 Mobility Analysis One of the basic steps in the kinematic analysis of mechanical systems is to determine the number of degrees of freedom or independent coordinates required to determine the configuration of the system. It can be shown that the number of constraints provided by a joint is equal to the number of degrees of freedom eliminated from the unconstraint system as a result of using this joint. In the planar system, the configuration of a rigid body undergoing unconstrained motion can be described by three independent coordinates due to the common constraints. Therefore, a planar system with n unconstrained movable bodies has 3 n DOF. If the system has p joints, each of which provides two constraints (note the common constraints), then the number of degrees of the system can be evaluated by the mobility (Glubler) criterion
运动生物力学

人體重心(二)
平衡的種類
◎穩定平衡 無論物體如何移動,其重心一定上升,如單槓懸 垂.雙槓槓上支撐。 ◎不穩定平衡 物體原來姿勢,不增加位移,位置稍有傾斜,重 心會下降,如起跑姿勢,手倒立。 ◎隨遇平衡 如物體移動,仍為平衡者,物體位置變動時,重 心既不升高,也不降低,如不倒翁。
影響平衡的因素
◎重心在支撐基底面內 • 支撑基底:身體和支撐表面之間所圍 成的面積。 • 物體重心在基底面內,亦即重心線 在基底面內,此物體就穩定平衡, 重心線愈靠近基底邊線,愈不穩定。 ◎基底面大小 ◎重量 ◎重心高度 : 重心愈靠近基底,愈穩 定。 ◎迴旋 : 向前迴旋運動,增加物體穩 定性。
運動生物力學的原理與應用
美和技術學院
廖逢錦 博士
97.05.25
何謂運動生物力學?
◎運動生物力學(Biomechanics): 是運動學(Kinematics)和生物力學 (Kinesiology)整合而成的一門科學。 ◎運動生物力學:是描寫、分析與評估人體運 動時,身體之內在與外在力量,以及這些 力量所造成影響的一門科學(Hay,1993)
動力學(Kinetics)
•討探力與運動之間關係的研究 •牛頓第二運動定律 F = ma •衝量動量等式定律 F∆ t = m∆ V
平衡與穩定原理 (Principles of balance and stability) • • • • 重心 平衡的種類 影響平衡的因素 力矩
人體重心(一)
◎重心(Center of gravity , COG) •身體各部位受到地球引力的作用,把各個部 位的引力加起來,這些引力合力的作用點 就是COG。 ◎重心受年齡、性別、身體結構的影響 •COG是身體最大肌力所在,是產生大力量的 原點。 •人體站立時重心在第二薦椎前方一吋處。
高中物理力学
高中物理力学
高中物理力学是物理学的一个分支,主要研究物体的运动和力的作用。
以下是高中物理力学的主要内容:
1. 运动学(Kinematics):研究物体的运动状态、位置、速度、加速度以及与时间的关系。
包括直线运动和曲线运动的描述和计算。
2. 动力学(Dynamics):研究物体运动的原因和规律,包括牛顿三定律、力的合成与分解、力的作用和力的平衡等内容。
3. 动量和冲量(Momentum and Impulse):研究物体的运动量和冲量的概念,以及守恒定律的应用。
4. 能量和功(Energy and Work):研究物体的能量转化和功的概念,包括动能、势能、机械能守恒定律等。
5. 万有引力(Universal Gravitation):研究地球引力、行星运动和万有引力定律的应用。
6. 静力学(Statics):研究物体处于静止状态时的力学平衡和杠杆原理。
在学习高中物理力学时,学生将学习和应用上述概念和定律,通过数学方法进行物理量的计算和问题的解答。
同时,实验和观察也是力学学习中重要的部分,帮助学生加深对物理原理的理解。
通过学习高中物理力学,学生可以了解物体的运动规律,掌握力学的基本概念和定律,培养科学思维和问题解决能力。
此外,力学作为物理学的基础,也为后续学习其他物理学分支打下坚实的基础。
1/ 1。
物理专业英语名词解释
part one mechanics力学chapter 1 kinematics—uniformly accelerated motion运动学,匀加速运动frame of reference: 参照系position vector and displacement 位置向量和位移speedvelocity 速度instantaneous velocity瞬时速度velocity components速度分量acceleration 加速度graphical interpretation图像释义uniformly accelerated motion along a straight line 匀加速直线运动acceleration due to gravity (g) 重力加速度projectile problems落体问题relative motion相对运动chapter 2 dynamics-- newton's laws of motion动力学- 牛顿运动定律general properties of forces in mechanics:力的基本性质1 the law of universal gravitation万有引力定律2the weight 重量3 the tensile force 拉力4 the normal force 法向力5 the friction force 摩擦力6 dimensional analysis三维分析chapter 3 equilibrium平衡concurrent forces共点力are forces whose lines of action all pass through a common point. the forces acting on a point object are concurrent because they all pass through the same point, the point object.equilibrium 平衡rigid body刚体the torque (or moment) 转矩或力矩the two conditions for equilibrium 平衡的两个条件the center of gravity 重心axis轴chapter 4 work and energy功和能kinetic energy (ke) 动能conservative force保守力⑵gravitational (weight) potential energy (peg) 重力(重量)势能⑵elastic potential energy 弹性势能the efficiency 效率chapter 5 impulse and momentumthe linear momentum 冲量与动量an impulse 冲量collisions and explosions碰撞和爆炸a perfectly elastic collision 完全弹性碰撞coefficient of restitution恢复系数the center of mass重心chapter 6 rotation转动the angular speed 角速度the angular acceleration 角加速度tangential 【数】切线;正切centripetal acceleration ( )加速度the centripetal force 向心力chapter 7 rigid-body rotation刚体转动the moment of inertia 转动惯量parallel-axis theorem平行轴定理chapter 8 elasticity弹性elasticity弹性;弹力the stress 【物】应力[u][c]strain 应变the elastic limit弹性极限the shear modulus 切变模量standard atmospheric pressure标准大气压the hydrostatic pressure静水压力equation of continuity连续性方程the viscosity 粘度spring弹簧a restoring force 恢复力simple harmonic motion 简谐运动vibratory motion 振动运动the period ( ) 【数】循环节;周期the frequency ( ) 频率the elastic potential energy 弹性势能the simple pendulum 单摆chapter 11 wave motion波动a propagating wave 波传播wave terminology波术语in-phase vibrations同相振动standing waves驻波conditions for resonance共振的条件longitudinal (compressional) waves 纵向(挤压)波chapter 12 sound声音the intensey (i)强度loudness 响度beats节拍doppler effect 多普勒效应interference effects 干扰效应part two thermodynamics热力学chapter 1 the kinetic theory of gases第1章气体动力学理论avogadro's number ( ) 阿伏伽德罗数()the root mean square speed根均方速度the absolute temperature绝对温度the mean free path (m.f.p.) 平均自由程(m.f.p.)the equipartition theorem of energy 能量均分定理ideal gas law理想气体定律heat 热the internal energy 内部能量an isobaric process is a process carried out at constant pressure. 等压过程是恒压进行的过程。
ap物理必背词汇

ap物理必背词汇AP物理是一门考试,主要考察学生对物理知识的掌握和运用能力。
在备考过程中,掌握和记忆一些必备的词汇是非常重要的。
下面将介绍一些AP物理必背词汇,帮助大家更好地备考。
一、运动与力学1. 运动学(kinematics):研究物体运动的学科。
2. 位移(displacement):物体从一个位置到另一个位置的变化。
3. 速度(velocity):物体在单位时间内移动的位移。
4. 加速度(acceleration):物体在单位时间内速度的变化率。
5. 动量(momentum):物体运动的惯性量,与质量和速度有关。
6. 力(force):物体受到的推或拉的作用。
7. 弹力(elastic force):物体被压缩或拉伸时产生的力。
8. 引力(gravity):地球或其他物体对物体施加的吸引力。
9. 惯性(inertia):物体保持静止或匀速直线运动的性质。
10. 摩擦力(friction):物体相对运动时产生的阻碍力。
11. 重力加速度(acceleration due to gravity):物体在自由下落中的加速度。
二、力与运动1. 牛顿第一定律(Newton's first law):物体保持静止或匀速直线运动,直到外力作用于它。
2. 牛顿第二定律(Newton's second law):物体的加速度与作用在它上面的力成正比,与物体质量成反比。
3. 牛顿第三定律(Newton's third law):任何两个物体之间的作用力与反作用力大小相等、方向相反。
4. 弹性碰撞(elastic collision):碰撞后物体动能守恒,动量守恒。
5. 非弹性碰撞(inelastic collision):碰撞后物体动能不守恒,动量守恒。
6. 斜面(inclined plane):倾斜的平面,可以减少力的大小。
7. 滑块(block):用于实验和计算的小块物体。
8. 轨道(track):物体在上面运动的路径。
机械英语知识点总结大全
机械英语知识点总结大全一、Basic Mechanical Engineering 基本机械工程1. Mechanical Engineering 机械工程Mechanical engineering is the branch of engineering that involves the design, production, and operation of machinery. 机械工程是涉及机械设计、生产和操作的工程分支。
2. Force and Motion 力和运动Force is any interaction that, when unopposed, will change the motion of an object. 力是任何相互作用,当没有阻力时,会改变物体的运动。
3. Simple Machines 简单机械A simple machine is a mechanical device that changes the direction or magnitude of a force. 简单机械是一种可以改变力的方向或大小的机械设备。
4. Kinematics 运动学Kinematics is the branch of classical mechanics that describes the motion of points, bodies, and systems of bodies without considering the forces that cause the motion. 运动学是描述点、物体和物体系统运动的经典力学分支,不考虑引起运动的力。
5. Dynamics 动力学Dynamics is the study of forces and torques and their effect on motion. 动力学是力和转矩以及它们对运动的影响的研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MOBILE ROBOTICS course KINEMATICS MODELS OFMOBILE ROBOTSMaria Isabel RibeiroPedro Limamir@isr.ist.utl.pt pal@isr.ist.utl.ptInstituto Superior Técnico (IST)Instituto de Sistemas e Robótica (ISR)Av.Rovisco Pais, 11049-001 LisboaPORTUGALApril.2002All the rights reserved•Gregory Dudek, Michael Jenkin, “Computational Principles of Mobile Robotics”, Cambridge University Press, 2000 (Chapter 1).•Carlos Canudas de Wit, Bruno Siciliano, Georges Bastin (eds),“Theory of Robot Control”, Springer 1996.Kinematics for Mobile Robots•What is a kinematic model ?•What is a dynamic model ?•Which is the difference between kinematics anddynamics?•Locomotion is the process of causing an autonomous robot to move.–In order to produce motion, forces must be applied to the vehicle•Dynamics–the study of motion in which these forces are modeled–Includes the energies and speeds associated with these motions•Kinematics–study of the mathematics of motion withouth considering the forces that affect the motion.–Deals with the geometric relationships that govern the system–Deals with the relationship between control parameters and the beahvior of a system in state space.Notation•{X m ,Y m } –moving frame •{X b , Y b } –base frameX mY mPX bY bxyθθ=y x q robot posture in base frameθθ−θθ=θ1000cos sin 0sin cos )(R Rotation matrix expressingthe orientation of the base frame with respect to the moving frameWheeled Mobile Robots •Idealized rolling wheely axisx axisy axisz motion•If the wheel is free to rotate about its axis (x axis), the robot exhibits preferencial rollong motion in one direction(y axis) and a certain amount of lateral slip.•For low velocities, rolling is a reasonable wheel model.–This is the model that will be considered in the kinematics models of WMRWheel parameters:•r = wheel radius•v = wheel linear velocity•w = wheel angular velocity•v r (t) –linear velocity of right wheel•v l (t) –linear velocity of left wheel •r –nominal radius of each wheel•R –instantaneous curvature radius of the robot trajectory, relative to the mid-point axisLRICCxyθ2L R −2L R +Curvature radius of trajectory described by LEFT WHEELCurvature radius of trajectory described by RIGHT WHEEL2LR )t (v )t (w r +=2LR )t (v )t (w l −=L)t (v )t (v )t (w l r −=))t (v )t (v ())t (v )t (v (2L R r l r l −+=))t (v )t (v (21R )t (w )t (v l r +==• 2 drive rolling wheels)Rcos y ,sin R x (ICC θ+θ−=control variables•Kinematic model in the robot frame−= θ)t (w )t (w L r L r 002r 2r )t ()t (v )t (v r l y x !•w r (t) –angular velocity of right wheel •w l (t) –angular velocity of left wheelUseful for velocity controlθθ= θ)t (w )t (v 100)t (sin 0)t (cos )t ()t (y)t (x !!!)t ()q (S )t (qξ=!controlvariables))t (v )t (v (21R )t (w)t (v l r +==()()σσ=θσσθσ=σσθσ=∫∫∫d )(w )t (d )(sin )(v )t (y d )(cos )(v )t (x tt0t0L )t (v )t (v )t (w l r−=)t (w )t ()t (sin )t (v )t (y)t (cos )t (v )t (x=θθ=θ=!!!Kinematic model in the world frame•Particular cases:–v l (t)=v r (t)•Straight line trajectory–v l (t)=-v r (t)•Circular path with ICC (instantaneous center of curvature) onthe mid-point between drive wheels.cte )t ( 0)t ( 0)t (w )t (v )t (v )t (v l r =θ⇒=θ⇒===!)t (v L2)t (w 0)t (v R ==Synchronous drive•In a synchronous drive robot (synchro drive) each wheel is capable of being driven and steered.•Typical configurations–Three steered wheels arranged as vertices of an equilateral triangle often surmounted by a cylindrical platform–All the wheels turn and drive in unison•This leads to a holonomic behavior•Steered wheel–The orientation of the rotation axis can be controlledy axis•All the wheels turn in unison•All of the three wheels point in the same direction and turn at the same rate–This is typically achieved through the use of a complex collection of belts that physically link the wheels together•The vehicle controls the direction in which the wheels point and the rate at which they roll•Because all the wheels remain parallel the synchro drive always rotate about the center of the robot•The synchro drive robot has the ability to control the orientation θof their pose diretly.•Control variables (independent)–v(t), w(t)•The ICC is always at infinity•Changing the orientation of the wheels manipulates the direction of ICC()()σσ=θσσθσ=σσθσ=∫∫∫d )(w )t (d )(sin )(v )t (y d )(cos )(v )t (x tt0t•Particular cases:–v(t)=0, w(t)=w=cte. during a time interval•The robot rotates in place by an amount–v(t)=v, w(t)=0 during a time interval•The robot moves in the direction its pointing a distancet ∆tw ∆t∆tv∆•Three wheels and odometers on the two rear wheels •Steering and power are provided through the front wheel•control variables:–steering direction α(t)–angular velocity of steering wheel w s(t)ICC ICC The ICC must lie on the line that passesthrough, and isperpendicular to, thefixed rear wheelsRIf the steering wheel is set to an angle α(t) from the straight-line direction, the tricycle will rotate withangular velocity w(t) about a point lying a distance R along the line perpendicular to and passing through the rear wheels.d xyθαR())t (2tg d )t (R α−π=22s )t (R d r )t (w )t (w +=X bY br = steering wheel radiusangular velocity of the moving frame relative to the base framer)t (w )t (v s s =linear velocity of steering wheel)t (sin d)t (v )t (w s α=Kinematic model in the robot frameKinematic model in the world frame)t (sin d)t (v )t ()t (sin )t (cos )t (v )t (y)t (cos )t (cos )t (v )t (xs s s α=θθα=θα=!!!)t (sin d)t (v )t (0)t (v )t (cos )t (v )t (v s y s x α=θ=α=!with no splippage)t (sin d)t (v )t (w )t (cos )t (v )t (v s s α=α=θθ= θ)t (w )t (v 100)t (sin 0)t (cos )t ()t (y)t (x !!!OmnidireccionalX mY fθ30º123LY mXf−−=θ321y x w w w L 3r L 3r L 3rr 31r 31r 32r 31r310V V !Kinematic model in the robot framew 1, w 2, w 3–angularvelocities of the threeswedish wheelsSwedish wheel。