极坐标系的应用
极坐标系的概念与应用

极坐标系的概念与应用极坐标系是一种描述平面上点的坐标系统,与直角坐标系相对应。
它以极轴和极角来确定点的位置,极轴通常为原点到点的距离,而极角则是从极轴正方向旋转到线段的方向所经过的角度。
极坐标系在各个科学领域中都有广泛的应用,包括物理学、工程学、数学等等。
本文将介绍极坐标系的概念以及它在不同领域中的应用。
一、极坐标系的概念极坐标系是一种二维坐标系统,用极径和极角来描述平面上的点。
在极坐标系中,平面上的点可以表示为(r, θ),其中r是点到原点的距离,θ是从极轴正方向旋转到线段的方向所经过的角度。
极径r是一个非负实数,极角θ通常用弧度制表示。
极坐标系与直角坐标系之间的转换关系由以下公式给出:x = r * cos(θ)y = r * sin(θ)其中(x, y)是直角坐标系中的点,r是点的极径,θ是点的极角。
这些公式使得我们可以在直角坐标系和极坐标系之间进行坐标的转换,方便我们在不同坐标系中进行计算和分析。
二、极坐标系的应用1. 物理学中的应用:极坐标系在物理学中有广泛的应用,特别是在描述圆形、旋转质点和极化等问题中。
例如在力学中,我们可以用极坐标系来描述质点在圆周运动中的运动规律,方便地计算质点的速度和加速度。
此外,极坐标系还在电磁学中用于描述电场和磁场的变化规律。
2. 工程学中的应用:工程学中的许多问题,如天线的辐射方向、波传播和声纳导航等,都可以使用极坐标系来进行分析和设计。
通过将问题转化为极坐标系,我们可以更好地理解和解决实际工程中的各种应用场景。
3. 数学中的应用:极坐标系在数学中也有重要的应用,特别是在微积分和复数理论中。
在微积分中,利用极坐标系可以简化一些复杂的曲线积分和面积计算。
在复数理论中,极坐标系可以用来表示复数的幅度和幅角,方便进行复数运算和解析几何的推导。
结论极坐标系是一种二维坐标系统,以极径和极角来确定平面上的点的位置。
它在物理学、工程学、数学等多个领域中都有广泛的应用。
极坐标系的应用练习题
极坐标系的应用练习题极坐标系是一种描述平面上点位置的坐标系统,它由点到极点的距离和点与极轴的夹角两个参数确定。
在实际应用中,极坐标系有着广泛的应用。
本文将通过一些练习题来演示极坐标系的应用。
1. 题目一:求点的极坐标表示已知平面上一点P的直角坐标表示为(3, 4),求该点的极坐标表示。
解答:根据直角坐标到极坐标的转换公式,可以得到点到原点的距离r和点与x轴的夹角θ。
首先,通过勾股定理可以计算出点到原点的距离r:r = √(x^2 + y^2)代入已知坐标得:r = √(3^2 + 4^2) = 5接下来,使用反正切函数可以计算出点与x轴的夹角θ:θ = arctan(y / x)代入已知坐标得:θ = arctan(4 / 3)因此,该点的极坐标表示为(5, arctan(4 / 3))。
2. 题目二:求直线的极坐标方程已知平面上一直线L的直角坐标表示为2x + 3y = 6,求该直线的极坐标方程。
解答:直线的极坐标方程可以通过将直线方程转换为极坐标的形式得到。
首先,将直线方程转换为极坐标形式时,需要将直线方程写成标准形式,即y = f(x)的形式。
将2x + 3y = 6转换得:y = (6 - 2x) / 3接下来,可以通过直角坐标到极坐标的转换公式,将直线方程转换为极坐标的形式。
以点P(x, y)为例,将(x, y)代入上式得:r sin(θ) = (6 - 2r cos(θ)) / 3化简得:r = (6 sin(θ) - 2r cos(θ)) / 3sin(θ)移项得:r + 2r cos(θ) = 6 sin(θ) / 3sin(θ)化简得:r(1 + 2 cos(θ)) = 2因此,直线的极坐标方程为r = 2 / (1 + 2 cos(θ))。
3. 题目三:求曲线的极坐标方程已知平面上一曲线C的直角坐标表示为y = x^2,求该曲线的极坐标方程。
解答:曲线的极坐标方程可以通过将曲线方程转换为极坐标的形式得到。
极坐标系的性质与极坐标方程的应用

极坐标系的性质与极坐标方程的应用极坐标系是一种描述平面上点位置的坐标系统,它使用极径和极角来唯一确定一个点的位置。
极坐标系具有一些与直角坐标系不同的性质,同时,极坐标方程也有着广泛的应用。
本文将探讨极坐标系的性质以及极坐标方程在不同领域的应用。
一、极坐标系的性质在极坐标系中,一个点的位置可以由极径和极角来确定。
极径表示该点到原点的距离,而极角表示该点与极轴的夹角。
极坐标系的性质如下:1. 原点:极坐标系的原点即为极坐标的起点,表示为O。
2. 极轴:极轴是极坐标系中的一条直线,通过原点O,并与x轴方向相同。
极轴的角度为0或360度。
3. 极径:极径表示一个点到原点O的距离,通常用r表示。
极径的取值范围可以是非负实数,即r≥0。
4. 极角:极角表示一个点与极轴的夹角,通常用θ(读作西塔)表示。
极角的取值范围可以是[0, 2π) 或[0, 360°)。
5. 制正:在极坐标系中,负极径和负极角并不常见。
一般来说,极径为负表示该点位于极轴的反方向,而极径为正表示该点位于极轴方向。
极角为负表示该点位于极轴的逆时针方向,而极角为正表示该点位于极轴的顺时针方向。
二、极坐标方程的应用极坐标方程是一种通过极坐标表示点的坐标的方程形式。
极坐标方程在各个领域有着广泛的应用,以下将介绍几种常见的应用。
1. 极坐标方程与图形绘制:极坐标方程可以描述各种图形的形状,例如圆、椭圆、双曲线等。
通过调整极坐标方程中的参数,可以绘制出不同形态的图形,实现对图形的变换和调整。
2. 极坐标方程与物体运动:在物体运动的描述中,极坐标方程可以提供更直观的表达方式。
例如,在天文学中,行星绕太阳运动的轨迹可以使用极坐标方程来描述。
3. 极坐标方程与工程设计:在工程设计中,极坐标方程可以用来描述物体的形状和运动规律。
例如,在风力发电机的设计中,可以使用极坐标方程来描述风轮的叶片形状,以实现最大的能量转化效率。
4. 极坐标方程与电磁场分布:在电磁学和电路设计中,极坐标方程可以用来描述电场和磁场的分布情况。
极坐标的引入与应用

极坐标的引入与应用极坐标是描述平面上点的一种坐标系统,它将点的位置与距离和角度相关联。
相比于笛卡尔坐标系,极坐标更适用于描述圆形或对称结构的点。
本文将介绍极坐标的基本概念、引入背景以及其在不同领域的应用。
一、极坐标的基本概念极坐标系统中,一个点的坐标由两个值确定:极径(r)和极角(θ)。
极径表示点到原点的距离,极角表示点与参考方向的夹角。
极径通常为非负数,而极角则可以大于360度或小于0度。
二、极坐标的引入背景极坐标最早的记载可追溯到公元前3世纪的希腊数学家阿基米德。
他用极坐标描述了圆的面积和弧长,并研究了螺旋线等曲线。
随后,极坐标开始广泛应用于天文学、物理学等领域。
在欧拉18世纪的工作中,极坐标得到了更为系统和完善的理论阐述,进一步加深了人们对极坐标的认识。
三、极坐标在数学中的应用1. 曲线方程的表示:极坐标可以简化描述和计算对称图形的方程。
常见的极坐标方程包括圆的方程(r=a)、直线的方程(θ=b)以及常见曲线如阿基米德螺旋线、心形线等。
2. 曲线的长度和曲率:极坐标可以轻松计算曲线弧长和曲率。
通过对极坐标方程求导并计算积分,可以得到曲线的长度和曲率。
3. 极坐标的复数表示:极坐标可以将复数用幅度和辐角来表示,并方便进行复数运算。
特别地,极坐标下的乘法和除法运算非常简便。
四、极坐标在物理学中的应用1. 力学和动力学:在描述物体运动和旋转的问题中,极坐标可以使得方程简化,并更好地展示问题的几何特征。
2. 电磁学:极坐标可方便描述电场或磁场的分布情况,并帮助分析电场或磁场与点电荷或点磁荷之间的作用关系。
3. 流体力学:极坐标在描述圆对称流体力学问题时非常有用,例如旋转流体、涡旋、气旋等。
五、极坐标在工程与技术中的应用1. 工程绘图:在建筑、机械和电子等工程领域中,极坐标可用于绘制和设计对称结构,如轮胎、圆盘齿轮等。
2. 雷达和导航系统:在雷达和导航系统中,极坐标可以精确地描述目标的方位角和距离,从而方便地实现目标追踪和导航引导。
极坐标系的基本概念

极坐标系的基本概念极坐标系是一种描述平面上点位置的坐标系,它以点到原点的距离和点与正半轴的夹角来表示点的位置。
相比于直角坐标系,极坐标系更适用于描述圆形或球形的几何问题。
本文将介绍极坐标系的基本概念及其在数学和物理中的应用。
一、极坐标系的定义极坐标系用两个数表示点的位置,分别是极径和极角。
极径表示点到原点的距离,用正实数表示;极角表示点与正半轴的夹角,以弧度为单位。
在极坐标系中,原点表示极径为0的点,也是极角为任意值的点。
在直角坐标系中,一个点的位置由X坐标和Y坐标确定,即(x,y)。
而在极坐标系中,一个点的位置由极径r和极角θ确定,即(r,θ)。
二、极坐标系与直角坐标系的转换公式在极坐标系和直角坐标系之间,可以通过一些公式进行坐标的转换。
1. 从直角坐标系到极坐标系的转换:极径r可以通过以下公式计算:r = √(x² + y²)极角θ可以通过以下公式计算:θ = arctan(y/x),其中arctan为反正切函数。
2. 从极坐标系到直角坐标系的转换:X坐标可以通过以下公式计算:x = r * cos(θ),其中cos为余弦函数。
Y坐标可以通过以下公式计算:y = r * sin(θ),其中sin为正弦函数。
三、极坐标系的应用极坐标系在数学和物理中有着广泛的应用。
1. 极坐标方程一些图形在直角坐标系中难以描述,而在极坐标系中可以用较简单的方程表示。
例如,圆的方程在极坐标系中可以表示为 r = a,其中a为圆的半径。
其他曲线如椭圆、双曲线等也可以用极坐标方程表示。
2. 极坐标系中的积分在计算一些特殊曲线的弧长、曲面积分和体积等问题时,极坐标系更加方便。
利用极坐标系进行积分计算可以简化问题并提高计算效率。
3. 物理中的应用极坐标系在力学、电磁学、流体力学等领域都有广泛应用。
例如,在描述质点的运动轨迹时,如果运动轨迹呈现出旋转或对称性,极坐标系更适用于描述和分析。
结语极坐标系作为一种描述平面上点位置的坐标系,具有简洁、直观的特点,被广泛应用于数学和物理学科中。
极坐标系的概念与应用

极坐标系的概念与应用极坐标系是一种坐标系统,它与我们通常使用的直角坐标系不同。
它以极径和极角来描述平面上的点的位置。
极径表示点到原点的距离,极角表示点与参考线之间的角度。
一、极坐标系的定义和转换公式极坐标系可以用于描述平面上的点的位置,其中原点为极点,极径和极角分别确定了点的位置。
极坐标系的转换公式如下:1. 直角坐标转换为极坐标:极径r = √(x² + y²)极角θ = arctan(y/x)2. 极坐标转换为直角坐标:x = r * cos(θ)y = r * sin(θ)二、极坐标系的特点和优势极坐标系具有以下特点和优势:1. 简洁直观:以极径和极角两个数值来描述点的位置,具有图形直观和空间形式简洁的特点。
2. 方便计算:在某些情况下,极坐标系的计算更加方便,特别是当图形具有对称性或具有某种规律时,使用极坐标系可以简化计算过程。
3. 描述曲线方程:对于一些特定的曲线方程,使用极坐标系可以更加简单和直观地描述其形状和特征,例如圆、椭圆、螺旋线等。
三、极坐标系的应用领域1. 物理学中的力学问题:在力学中,我们经常遇到圆周运动、轨道运动等问题,这些问题可以利用极坐标系来进行描述和计算。
2. 工程与建筑设计:在工程和建筑设计中,一些具有旋转或对称性的结构,如桥梁、塔吊等,利用极坐标系可以更直观地描述其形状和特征,方便设计和计算。
3. 天文学中的星体运动:天文学中常常涉及到行星、卫星等星体的运动问题,利用极坐标系可以更加方便地描述和计算其轨道和运动轨迹。
4. 机器人运动路径规划:在机器人运动路径规划中,需要考虑到机器人的位置和朝向,利用极坐标系可以更方便地描述机器人的位置和运动方向,从而进行路径规划和控制。
总结:极坐标系是一种与直角坐标系不同的坐标系统,通过极径和极角来描述平面上的点的位置。
它具有简洁直观、方便计算以及描述特定曲线方程的优势,被广泛应用于物理学、工程与建筑设计、天文学以及机器人运动路径规划等领域。
极坐标系与极坐标方程的应用
极坐标系与极坐标方程的应用极坐标系和极坐标方程是数学中一种常用的坐标系和数学表达方法。
它们在许多领域中具有广泛的应用。
本文将介绍极坐标系和极坐标方程的基本概念,并探讨它们在物理学、工程学和计算机图形学等领域中的具体应用。
一、极坐标系的基本概念极坐标系是一种二维坐标系,它由一个原点O和一个极轴构成。
极轴是从原点O出发的射线,表示角度的方向。
任意一点P可以用极径r 和极角θ来表示。
极径r是从原点O到点P的距离,极角θ是极轴与射线OP之间的夹角。
二、极坐标方程的基本形式极坐标方程是一种用极径和极角来表示的方程。
一般来说,极坐标方程可以表示为r = f(θ),其中f(θ)是θ的函数。
三、极坐标系与物理学的应用极坐标系在物理学中有广泛的应用。
例如,在天文学中,极坐标系可以用来描述天体的位置和运动。
天体的轨迹可以由极坐标方程来表示,通过观测其极径和极角的变化来研究天体的运动规律。
此外,在力学中,我们也可以使用极坐标系来描述刚体的运动。
通过将刚体的运动分解为径向和切向两个方向的运动,可以简化力学问题的求解过程,更加方便地分析刚体受力和受力矩的情况。
四、极坐标方程与工程学的应用在工程学中,极坐标方程有很多应用。
例如,在电磁场分析中,可以使用极坐标方程来描述电荷或电流的分布情况。
通过求解极坐标方程,可以计算出电磁场的分布情况,并用于指导电子器件的设计和优化。
此外,在建筑工程中,极坐标方程也有一些应用。
例如,可以用极坐标方程来描述圆形的建筑物或结构的形状和尺寸。
极坐标方程提供了一种简洁的方式来描述复杂的建筑物形状,有助于工程师进行结构设计和施工规划。
五、极坐标系与计算机图形学的应用在计算机图形学中,极坐标系也有重要的应用。
通过极坐标系,可以方便地描述和生成曲线和图像。
例如,通过调整极径和极角的变化,可以绘制出各种形状的图案和曲线,包括圆、螺旋线、心形线等。
此外,在图像处理中,也可以使用极坐标系来实现图像的旋转和变形等操作。
极坐标系的应用
极坐标系的应用极坐标系是一种以极径(r)和极角(θ)来表示点坐标的数学系统。
它在物理、工程学和其他领域中有着广泛的应用。
本文将探讨极坐标系在几何图形、物理力学和图像处理等领域中的具体应用。
1. 几何图形1.1 极坐标方程在极坐标系中,我们可以使用极坐标方程来描述各种几何图形的形状。
比如,圆的极坐标方程为 r = a,其中 a 是圆的半径。
通过调整 a的值,我们可以绘制不同大小的圆。
1.2 极坐标绘图通过极坐标系,我们可以绘制出一些非常有趣的几何图形。
例如,利用参数方程绘制出的极坐标曲线,可以呈现出各种美妙的形状,如心形曲线、渐开线等。
这些图形通常比使用直角坐标系更容易描述和理解。
2. 物理力学2.1 引力场的描述在物理力学中,极坐标系可以用于描述引力场。
例如,在一个中心点引力场中,质点受到的引力与其到中心点的距离成反比。
这可以用极坐标系中的位势函数来描述。
通过极坐标系的分析,我们可以轻松地得到引力场的相关参数。
2.2 相对运动的描述在有些情况下,我们需要描述相对运动的物体。
极坐标系可以提供一种更简洁的分析方法。
通过将坐标系的原点放在一个物体上,并以该物体为极轴,我们可以用相对距离和相对角度来描述另一个物体相对于原点物体的位置。
3. 图像处理3.1 圆形检测极坐标系在图像处理中具有重要的应用,尤其是在圆形检测方面。
通过将图像转换为极坐标系,我们可以通过阈值设定和其他算法来检测图像中的圆形轮廓。
这种方法对于工业中的自动机器人导航和目标识别等任务特别有用。
3.2 图像畸变校正极坐标系还可以用于图像畸变校正。
例如,对于鱼眼镜头拍摄的图像,由于透视关系,图像中的直线可能呈现为弯曲的形状。
通过将图像转换为极坐标系,再进行校正,可以使图像中的直线恢复为真实的直线,提高图像的视觉效果和测量准确度。
总结:极坐标系在几何图形、物理力学和图像处理等领域中都有广泛的应用。
在几何图形方面,极坐标方程和极坐标绘图为我们创造了更多形状的可能性。
极坐标方程及其应用(精)
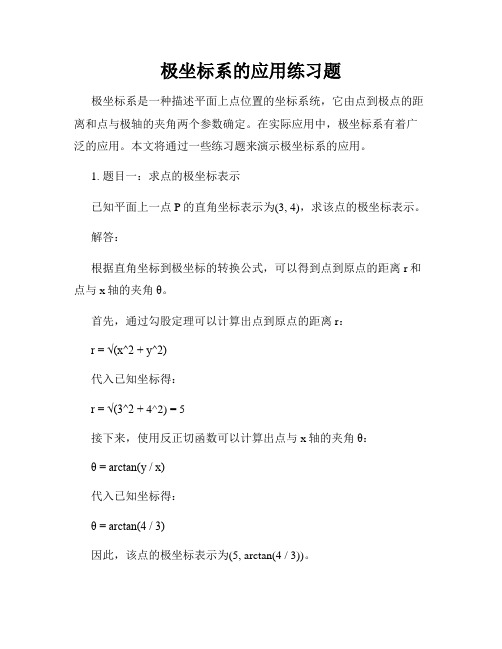
θ1ρ O(,)P ρθx极坐标方程及其应用一、基础知识 1. 极坐标系:平面内的一条规定有单位长度的射线Ox ,O 为极点,Ox 为极轴,选定一个长度单位和角的正方向(通常取逆时针方向),这就构成了极坐标系. 2.极坐标系内一点P 的极坐标:平面上一点P 到极点O 的距离||OP 称为极径ρ,OP 与Ox 轴的夹角θ称为极角,有序实数对(,)P ρθ,就叫做点P 的极坐标.(1)一般情况下,不特别加以说明时ρ表示非负数. 当0ρ=时表示极点;当0ρ<时,点(,)P ρθ的位置这样确定:作射线OP ,使xOP θ∠=,在OP 的反向延长线上取一点'P ,使得'||OP ρ=,点'P 即为所求的点.(2)点(,)P ρθ与点(,2)()k k Z ρπθ+∈所表示的是同一个点.综上所述,在极坐标系中,点与其点的极坐标之间不是一一对应而是一对多的对应,即(,)ρθ,(,2)k ρπθ+,(,(21))k ρπθ-++均表示同一个点.(3)若0ρ<,则0ρ->,规定点(,)ρθ-与点(,)ρθ关于极点对称,即(,)ρθ-与(,)ρπθ+表示同一点.如果规定0,02ρθπ>≤≤,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.3.极坐标与直角坐标的互化:极坐标与直角坐标的不同是,直角坐标系中,点与坐标是一一对应的,而极坐标系中,点与坐标是一多对应的.即一个点的极坐标是不唯一的. 4.直线的极坐标方程:若直线l 经过点00(,)M ρθ,且极轴到此直线的角为α ,求直线l 的极坐标方程. 设直线l 上任意一点的坐标为P (ρ,θ),由正弦定理,得:)0(n t ,sin ,cos ,222≠===+=x x y a y x y x θθρθρρsin sin OP OMOMP OPM=∠∠, 整理得直线l 的极坐标方程为00sin()sin()ρθαρθα-=-.一些特殊位置的直线方程如下:经过极点 经过定点M (a ,0),且与极轴垂直 经过定点M (b ,π2),且与极轴平行 θ = αρcos θ = aρsin θ = b5.圆的极坐标方程:若圆的圆心为00(,)M ρθ,半径为r ,求圆的极坐标方程. 设P (ρ,θ)为圆上任意一点,由余弦定理,得2222cos PM OM OP OM OP POM =+-∠,则圆的极坐标方程是:2220002cos()0r ρρρθθρ--+-=.一些特殊位置的圆的方程如下(设圆的半径为r): 圆心在极点 圆心在极点右侧 圆心在极点上方 圆心在极点左侧 圆心在极点下方 ρ = r ρ = 2r cos θ ρ = 2r sin θ ρ = −2r cos θ ρ = −2r sin θ二、典型例题例1.(2003北京)极坐标方程1cos 22cos 2=-θρθρ表示的曲线是( )D(A)圆(B)椭圆 (C)抛物线 (D)双曲线例2.(2001年全国)极坐标方程ρ=2sin(θ+π)的图形是()CxOl M (b ,π2)a(A) (B) (C) (D) 例3.(2000年京皖春)直线θ=α和直线ρsin(θ-α)=1的位置关系( )B(A) 垂直 (B) 平行 (C) 相交但不垂直 (D) 重合例4.(2002北京春)在极坐标系中,如果一个圆的方程是ρ=4cos θ+6sin θ,那么过圆心且与极轴平行的直线方程是( )A(A) ρsin θ=3 (B) ρsin θ = –3 (C) ρcos θ =2 (D) ρcos θ = –2 例5.(2003上海)在极坐标系中,定点A(1,2π),点B 在直线0sin cos =+θρθρ上运动,当线段AB 最短时,点B 的极坐标是_________.解析:在直角坐标系中,A 点坐标为(0,1),B 点在直线x +y =0上, AB 最短,则B 为)21,21(-,化为极坐标为)43,22(π. 例6.(2007广东)在极坐标系中,直线l 的方程为ρsin θ=3,则点(2,6π)到直线l 的距离为_________.2例7.(1999年全国)在极坐标系中,曲线ρ= 4sin(θ-3π)关于( )B (A) 直线θ=3π轴对称 (B)直线θ=65π轴对称(C) 点(2, 3π)中心对称 (D)极点中心对称例8.(2006上海)在极坐标系中,O 是极点,设点A(4,3π),B(5,65π-),则△OAB 的面积是 . 5例9.(2009辽宁卷)在直角坐标系xOy 中,以O 为极点,x 轴正半轴为极轴建立极坐标系,曲线C 的极坐标方程为cos()13πρθ-=,M 、N 分别为曲线C 与x 轴,y 轴的交点.(1)写出曲线C 的直角坐标方程,并求M 、N 的极坐标; (2)设M N 的中点为P ,求直线OP 的极坐标方程. 解析:(1)当0θ=时,2ρ=,∴M 的极坐标(2,0);当2πθ=时,3ρ=,∴N 的极坐标()32π. (2)直线OP 的极坐标方程为,(,)6πθρ=∈-∞+∞.三、巩固练习1.(2013安徽理5)在极坐标系中,点 (,)π23到圆2cos ρθ=的圆心的距离为( )D(A )2 (B)249π+(C)219π+(D)32.(2013北京理3)在极坐标系中,圆ρ=-2sinθ的圆心的极坐标系是( ) (A) (1,)2π(B) (1,)2π- (C) (1,0) (D)(1,π)解析:将极坐标方程化为普通方程得:0222=++y y x ,圆心的坐标为)1,0(-,其极坐标为)23,1(π,选B . 3.(2010北京卷理5)极坐标方程(1)()0(0)ρθπρ--=≥表示的图形是( ) (A )两个圆 (B )两条直线(C )一个圆和一条射线 (D )一条直线和一条射线4.(2000年京皖春)直线θα=和直线sin()1ρθα-=的位置关系( ) (A) 垂直 (B) 平行 (C) 相交但不垂直 (D) 重合 5.(2012年上海理)在极坐标系中,过点)0,2(M 的直线l 与极轴的夹角6πα=.若将l 的极坐标方程写成)(θρf =的形式,则=)(θf _________.6.(2012陕西理)直线2cos 1ρθ=与圆2cos ρθ=相交的弦长为________.3 7.(2012年湖南)在极坐标系中,曲线1C :(2cos sin )1ρθθ+=与曲线2C :a ρ=(0)a >的一个交点在极轴上,则a =_______.8.(2008广东卷)已知曲线12C C ,的极坐标方程分别为cos 3ρθ=,π4cos 002ρθρθ⎛⎫=< ⎪⎝⎭,≥≤,则曲线1C 与2C 交点的极坐标为 .(23,)6π9.(2012年江苏)在极坐标中,已知圆C 经过点()24P π,,圆心为直线3sin 32ρθπ⎛⎫-=-⎪⎝⎭与极轴的交点,求圆C 的极坐标方程.10.在极坐标系Ox 中,已知点A ⎝⎛⎭⎫1,α2,B ⎝⎛⎭⎫1,-α2 02πα⎛⎫<< ⎪⎝⎭,求过AB 的中点,且与OA 垂直的直线的极坐标方程.解:设AB 的中点为C , 则|OC |=cos α2,过C 作CD ⊥OA于D .则|OD |=|OC |·cos α2=cos 2 α2.设M (ρ,θ)是直线CD 上的任意一点,则∠MOD =θ-α2,在△MOD 中,|OD |=|OM |cos ⎝⎛⎭⎫θ-α2,即cos 2 α2=ρcos ⎝⎛⎭⎫θ-α2,所以直线CD 的极坐标方程为cos 2 α2=ρcos ⎝⎛⎭⎫θ-α2.。
极坐标系的极坐标方程的化学和物理应用
极坐标系的极坐标方程的化学和物理应用极坐标系是平面上的一种坐标系,其中点的位置由极径和极角表示。
极坐标系有很多应用,特别是在化学和物理领域中。
极坐标系的极坐标方程是常见的数学工具之一,用于描述各种形状和物理现象。
极坐标系的定义极坐标系是一种坐标系,其中点的位置由极径和极角表示。
极径是从原点到点的距离,极角是从参考轴(通常是x轴)到线段的角度。
极角通常用弧度表示,范围是0到2π。
在极坐标系中,坐标轴不是垂直和水平的,而是从原点开始向外发散的射线。
极坐标方程的定义极坐标方程是一种用极径和极角描述点的方程。
类似于直角坐标系的方程,极坐标方程中的变量是极径r和极角θ。
极坐标方程通常写成r=f(θ),其中f是一个函数,表示在给定极角时点的极径。
化学应用极坐标方程可用于分析分子结构和反应机理。
在化学中,分子的结构由原子的位置和化学键的长度和角度确定。
使用晶体学技术和计算方法确定分子结构时,极坐标方程非常有用。
极坐标方程可以轻松地计算化学键的长度和角度,从而确定分子的结构。
例如,极坐标方程可以用来计算甲烷(CH4)分子中碳原子和氢原子的距离。
根据VSEPR理论,甲烷分子的形状是四面体,其中碳原子在中心,四个氢原子在四个角上。
使用极坐标方程,可以将每个氢原子表示为一个点,其中点的极径是碳原子到氢原子的距离,极角是氢原子在分子中的角度。
从这些点中计算平均值可以确定碳原子和氢原子之间的距离。
物理应用极坐标方程在物理学中有许多应用,特别是在处理旋转和循环问题时。
例如,通常使用极坐标方程描述旋转运动的速度和位置。
极坐标方程还用于描述其他现象,例如涡流和电磁场。
在涡流中,极坐标方程可以用来计算流体中涡旋的大小和形状。
在电磁场中,极坐标方程可以用于计算电荷和电流的位置和相互作用。
总结极坐标系的极坐标方程是在化学和物理学中常用的工具。
它们可以用于描述分子结构、反应机理、旋转运动、涡流和电磁场等现象。
掌握极坐标系和极坐标方程可以帮助我们更好地理解这些现象,并在实践中应用它们。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)当 =
7 12
时,直线 l 过 B,C
两点,求
y0 与
的值。
2.已知直线 l 在直角坐标系 xOy 中的参数方程为{ x a tcos (t 为参数, 为倾斜角),以坐标原点 O 为 y tsin
极点,以 x 轴正半轴为极轴,建立极坐标系,在极坐标系中,曲线的方程为 cos2 4cos 0 。
, C2
于
A
,
B
两点,当
取何
值时, OB 取得最大值。 OA
14 / 15
x 2 t
9.在直角坐标系 xOy 中,直线 l 的参数方程为{
( t 为参数),若以该直角坐标系的原点 O 为极点,
y 3t
x 轴的非负半轴为极轴建立极坐标系,曲线 C 的极坐标方程为 sin2 4cos 0 。
y 3t 1
立极坐标系,曲线 C
的极坐标方程为
2cos 1 cos2
。
(1)写出直线 l 的极坐标方程与曲线 C 的直角坐标方程;
(2)已知与直线 l 平行的直线 l 过点 M 2, 0 ,且与曲线 C 交于 A, B 两点,试求 AB 。
x cos
8.在平面直角坐标系 xOy 中,曲线 C1 :
(t 为参数,
0,
π 2
)与圆
C
:
x2
y2
2x
4x
1
0
相
交于点 A, B ,以 O 为极点, x 轴正半轴为极轴建立极坐标系。
(1)求直线 l 与圆 C 的极坐标方程; (2)求 1 1 的最大值。
OA OB
5 / 15
参数方程及其应用
x 2cos
1.已知曲线
(2)设直线 与曲线 交于 两点,求
。
4.已知
0,
,在直角坐标系
xOy
中,直线
l1
的参数方程为
x tcos {
y tsin
,
(
t
为参数);在以坐标原点
O
为极点,
x
轴的正半轴为极轴的极坐标系中,直线 l2
的极坐标方程是
cos
2sin
6
。
(Ⅰ)求证: l1 l2 ;
建立极坐标系。 (1)求圆 的极坐标方程; (2)直线 的极坐标方程为
,其中 满足
为参数), 以坐标原点为极点, 轴正半轴为极轴 与 交于 两点,求 的值。
4 / 15
9.在直角坐标系 xOy 中,圆 C 的参数方程{ x 1 cos ( 为参数),以 O 为极点, x 轴的非负半轴为极轴 y sin
6.已知曲线 C1 的极坐标方程为 1 ,以极点为平面直角坐标系的原点,极轴为 x 的正半轴,建立平面直角 坐标系 xOy 。
x 1t (1)若曲线 C2 :{ y 2 t (t 为参数)与曲线 C1 相交于两点 A, B ,求 AB ;
(2)若 M 是曲线 C1 上的动点,且点 M 的直角坐标为 x, y ,求 x 1 y 1 的最大值。
(2)已知点
P 1,0 。若点
M
的极坐标为
1,
2
,直线
l
经过点
M
且与曲线 C
相交于
A,
B
两点,设线段
AB 的中点为 Q ,求 PQ 的值。
8.在平面直角坐标系
xOy
中,曲线
C1
过点
P
a,1
,其参数方程为
x {
a
2t ( t 为参数, a R ),以
y 1 2t
9.在平面直角坐标系 xoy 中,曲线 C :{ x 5cos 为参数 ,直线 l 过点 P 2,1 与曲线 C 交于 A、B
y 3sin
二点, P 为 AB 中点。以坐标原点 O 为极点,x 轴正半轴为极轴,以平面直角坐标系 xoy 的单位 1 为基本
单位建立极坐标系。
(1)求直线 l 的极坐标方程;
y 3 3t
系,曲线 C 的极坐标方程是 psin2 3cos 0 。
(1)求曲线 C 的直角坐标方程及直线 l 的极坐标方程; (2)求直线 l 与曲线 C 交点的极坐标 ( p 0, 0 2 ) 。
2 / 15
x 2 2cos
x x
5.在平面直角坐标系中,曲线 C1 :{
y sin
( 为参数)经伸缩变换{ 2 后的曲线为 C2 ,以坐标 y y
原点 O 为极点, x 轴非负半轴为极轴建立极坐标系。
(1)求曲线 C2 的极坐标方程;
(2)
A,
B
是曲线 C2
上两点,且 AOB
3
,求
OA
OB
的取值范围。
6.在极坐标中,已知圆 的圆心
,半径 。
(1)求圆 的极坐标方程; (2)若点 在圆 上运动,点 在 的延长线上,且
(Ⅰ)求曲线 C 的极坐标方程;
(Ⅱ)若直线 l: 0, , R 与曲线 C 相交于 A、B 两点,设线段 AB 的中点为 M,求 OM
的最大值。
13 / 15
x t 1
7.平面直角坐标系中,直线 l 的参数方程为{
( t 为参数),以原点为极点, x 轴正半轴为极轴建
C1 的参数方程为
{ y
3sin
( 为参数),以坐标原点 O 为极点,x 轴的正半轴为极轴建
立极坐标系,曲线 C2 的极坐标方程为 =2.
(Ⅰ)分别写出 C1 的普通方程, C2 的直角坐标方程;
(Ⅱ)已知 M,N 分别为曲线 C1 的上、下顶点,点 P 为曲线 C2 上任意一点,求 PM PN 的最大值。
(2)
Q x0
,y0
为曲线 C
上的动点,求
y0 x0
5
的范围。
10.已知曲线
,直线
(
为参数)
(Ⅰ)写出曲线 的参数方程,直线
的普通方程;
(Ⅱ)过曲线 上任意一点 作与 夹角为 的直线,交 于点 ,求
的最大值与最小值。
10 / 15
极坐标与参数方程的综合应用
1.在平面直角坐标系 xOy 中,以坐标原点 O 为极点,以 x 轴正半轴为极轴,建立极坐标系,若直线 l 的参数
3x y 4 0 ,曲线 C2 :
{
( 为参数),以坐标
y 1 sin
原点 O 为极点, x 轴正半轴为极轴,建立极坐标系。 (Ⅰ)求曲线 C1 , C2 的极坐标方程;
x tcos (Ⅱ)曲线 C3 :{ y tsin ( t 为参数,
t 0,
0
2
)分别交 C1
(1)写出曲线 C 的直角坐标方程;
(2)点 Q a, 0 ,若直线 l
与曲线 C
交于
A, B 两点,求使
1 | QA |2
1 | QB
|2
为定值的 a
值。
11 / 15
3.已知直线 的参数方程为
( 为参数),在以坐标原点 为极点, 轴正半轴为极轴的极坐标系中,
曲线 的极坐标方程为
。
(1)求直线 的普通方程和曲线 的直角坐标方程(化为标准方程);
极坐标系的应用
1.在平面直角坐标系
xOy
中,曲线
C
的参数方程为
x
2
3cos ( 为参数),以坐标原点 O 为极点,
y 3sin
x 轴正半轴为极轴建立极坐标系,已知点 P , 0, 0 2 是曲线 C 在极坐标中的任意一点。
(1)证明: 4cos 1 。
4.在极坐标系中,曲线 C
的方程为
2cos2
9
,点
P
2
3,
6
。以极点
O
为原点,极轴为
x
轴的正半轴
建立直角坐标系。
(1)求直线 OP 的参数方程的标准式和曲线 C 的直角坐标方程; (2)若直线 OP 与曲线 C 交于 A 、 B 两点,求 1 1 的值。
PA PB
7 / 15
点为极点, x 轴的正半轴为极轴,建立极坐标系。 (I)求圆 C 和直线 l 的极坐标方程; (II)射线 OP 交圆 C 于 R ,点 Q 在射线 OP 上,且满足 OP 2 OR OQ ,求 Q 点轨迹的极坐标方程。
x 1 2t
4.已知直线 l 的参数方程为{
( t 为参数),以原点为极点, x 轴的正半轴为极轴建立极坐标
,求动点 的轨迹方程。
3 / 15
7.已知曲线 C
的极坐标方程为 2
cos2
9 9sin2
,以极点为平面直角坐标系的原点,极轴为
x 轴的正半
轴建立平面直角坐标系。
(1)求曲线 C 的普通方程;
(2)
A、B 为曲线 C
上两个点,若
OA
OB
,求
|
1 OA
|2
1 | OB |2
的值。
8.在直角坐标系 中,圆 的参数方程为
(Ⅱ)以坐标原点 O 为极点, x 轴正半轴为极轴建立极坐标系,将圆 C1 上除点 O 以外所有点绕着 O 逆时针
旋转
3
得到曲线
C2
,求曲线