4-1根轨迹的基本概念
自动控制原理 第四章根轨迹

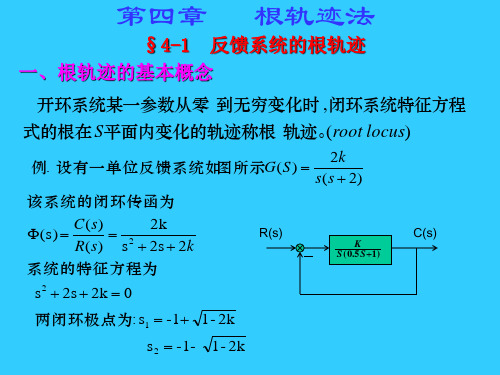
第四章根轨迹法4-1 根轨迹法的基本概念4-2 常规根轨迹的绘制法则4-3 广义根轨迹4-1 根轨迹法的基本概念一、根轨迹的概念根轨迹:系统中某个参数从零到无穷变化时,系统闭环特征根在s平面上移动的轨迹。
根指的是闭环特征根(闭环极点)。
根轨迹法是根据开环传递函数与闭环传递函数的关系,通过开环传递函数直接分析闭环特征根及系统性能的图解法。
K =0 s 1=0 s 2=-40 < K <1s 1 s 2为不等的负实根K =1s 1=-2 s 2=-21 < K < ∞s 1s2 实部均为-2由根轨迹可知:1)当K =0时,s 1=0,s 2=-1,这两点恰是开环传递函数的极点,同时也是闭环特征方程的极点.2)当0<K < 1 时,s 1,2都是负实根,随着k 的增长,s 1从s 平面的原点向左移,s 2从-1点向右移。
3) 当K = 1时, s 1,2= -2,两根重合在一起,此时系统恰好处在临界阻尼状态。
4) 1 <K <∞,s 1,2为共轭复根,它们的实部恒等于-2,虚部随着K 的增大而增大,系统此时为欠阻尼状态。
★在s平面上,用箭头标明K增大时,闭环特征根移动的方向,以数值表明某极点处的增益大小。
有了根轨迹图就可以分析系统的各种性能:(1)稳定性:根轨迹均在s的左半平面,则系统对所有K>0都是稳定的。
(2)稳态性能:如图有一个开环极点(也是闭环极点)s=0。
说明属于I型系统,阶跃作用下的稳态误差为0。
在速度信号V0t作用下,稳态误差为V0/K,在加速度信号作用下,稳态误差为∞。
(3)动态性能:过阻尼临界阻尼欠阻尼K越大,阻尼比ξ越小,超调量σ%越大。
由此可知:1、利用根轨迹可以直观的分析K的变化对系统性能的影响。
2、根据性能指标的要求可以很快确定出系统闭环特征根的位置;从而确定出可变参数的大小,便于对系统进行设计。
由以上分析知:根轨迹与系统性能之间有着密切的联系,但是,高阶方程很难求解,用直接解闭环特征根的办法来绘制根轨迹是很麻烦的。
第四章根轨迹法§4-1反馈系统的根轨迹
(3) 闭 环 极 点 与 开 环 零 点 、开 环 极 点 以 及 根 轨 迹 增益 均 有 关
根 轨 迹 法 的 基 本 任 务: 如 何 由 已 知 的 开 环 零 极点 的 分 布 及 根 轨 迹 增 益, 通 过 图 解 的
s2 2 闭 环 极 点 与 开 环 极 点同相 s1, s2均 为 负 实 数 s1 s2 -1
k 1/2时
s1,2 -1 j 2k - 1, 实 部 相 同 位 于 垂 直 于 实 轴 的 直上线
k 时 沿 上 述 直 线 趋 于 无 穷.远
K
s1 -1 1 - 2k s2 -1 - 1 - 2k
(s zi )
i 1 n
(s pj )
1 K
j 1
幅值条件
m
n
G(s)H(s) (s zi ) - (s p j)
i 1
j 1
m
n
i - j
i 1
j 1
180 (1 2) ( 0,1,2,)
相角条件
(s
j 1
z
j
)
h
(s
j 1
pj )
f
l
则
G(s)H(s)
K
(s
i 1 q
Zi
)
(s
j 1 h
zj)
(3)
(s
i 1
Pi
)
(s
j 1
z
j
)
n qh
mf l
自动控制原理2011第4章

=0
s1, 2 j3.74
K = 60
10+K
14
补充规则
规则八:闭环极点之和
系统满足n-m≥2时,系统闭环极点之和等于
开环极点之和
规则九:闭环极点之积
系统的n-m≥2且有开环零点位于原点时,系
统闭环极点之积就等于开环极点之积
15
返回
2 p 3 s180 [ 0.s 3) * s ( s 3K * j ) ( s 0 ) ( s 6)] 65 .6 ( 212 K (0 5 6 1 j1 1 j1) 5 3) ( ⑤分离点 .6 * 90* 141 11.4 ) 43.8 2.5 180 (26 K 135.163 K 3940 1 105 1a 0 j 1 1 1 s1 K * 0 41 0 * 65.6 0.212 K * K ds 0 3K * d d 5渐近线与实轴的夹角为 1 j d 6 0 d①根轨迹有5支 1 j d * 3 1 34 K * 3 (2k .2 1) ③实轴上的根 0 5 4 ,0 * .6 * 0.212 66 d 65135d K 0 142 s* 123 s 0 51,26, .0 s K 0 极点 45,,0,3 ,k K 0 K a 2 轨迹位于0-3 -1 0 j K 1 j 3940 105 K * 0.163 K *05 1 1 ,* 35.6 0 -3 -6 -5 用试探法求得分离点为45 及-5-6之间 a1 1.34 , 零点 45 , * * -5.53 0 a 2 3,无穷远 K K * 2 d 5.53 0 135 , 135 * (65.6 0.212 K ) S 33K 0 a 4 a * * K K 将 K * 35.6 代入辅助方程, 解得 S j1.34
4-1 根轨迹法基本概念

4.4.2 根轨迹与系统性能 1.稳定性 稳定性 当开环增益K从 变化 当开环增益 从0变化 到无穷时,根轨迹均在s 到无穷时,根轨迹均在 左半平面变化, 左半平面变化,不会进入 s右半平面,因此,对任 右半平面, 右半平面 因此, 均稳定。 意K值,系统均稳定。 值 2.稳态性能 稳态性能 因为开 因为开环系统只有一个 极点位于原点, 极点位于原点,所以系统 型系统, 为I型系统,其静态速度 型系统 误差系数为K。 误差系数为 。
i =1 1 j =1
比较开环传递函数与闭环传递函数可得: 环传递函数与闭环传递函数可得 比较开环传递函数与闭环传递函数可得: (1)闭环系统根轨迹增益,等于开环系统前向通 闭环系统根轨迹增益, 闭环系统根轨迹增益 道根轨迹增益 道根轨迹增益。 对单位反馈系统,闭环系统根轨迹增益等于 对单位反馈系统 闭环系统根轨迹增益等于 开环系统根轨迹增益 开环系统根轨迹增益。 (2)闭环零点由开环传递函数中前向通道传递函 闭环零点由开环传递函数中前向通道传递函 闭环零点由开环 数的零点和反馈通道传递函数的极点组成。 数的零点和反馈通道传递函数的极点组成。 对单位反馈系统,闭环零点就是开环零点。 对单位反馈系统,闭环零点就是开环零点。 (3)闭环极点与开环零、极点及开环系统根轨迹 闭环极点与开环零、极点及开环系统根轨迹 闭环极点与开环零 增益K*有关 有关。 增益 有关。
第4章 线性系统根轨迹法 章
平顶山学院计算机科学与技术学院
根轨迹法是一种图解方法, 根轨迹法是一种图解方法,它是经典控制 理论中对系统进行分析和综合的基本方法之 一。由于根轨迹图直观地描述了系统特征方 程的根(即系统的闭环极点) 平面上的分 程的根(即系统的闭环极点)在s平面上的分 因此, 布,因此,用根轨迹法分析自动控制系统十 分方便, 分方便,特别是对于高阶系统和多回路系 应用根轨迹法比用其他方法更为方便, 统,应用根轨迹法比用其他方法更为方便, 因此在工程实践中获得了广泛应用 中获得了广泛应用。 因此在工程实践中获得了广泛应用。本章主 要介绍根轨迹的概念, 要介绍根轨迹的概念,绘制根轨迹的基本规 则和用根轨迹分析自动控制系统性能的方法 能的方法。 则和用根轨迹分析自动控制系统性能的方法。
根轨迹法的基本概念

K*
s1,2 1
1 K*
令K*(由0到∞ )变动,s1、s2在s平面的移动轨 迹即为根轨迹。
K* 0, s1 0, s2 2 K* 1, s1 1, s2 1 K* 2, s1 1 j, s2 1 j K* 5, s1 1 2 j, s2 1 2 j
特征方程的根 运动模态 性、系统性能)
1
1
1 ,d 4
m
(s zi )
1 G(s)H(s) 0
G(s)H(s) K*
i1 n
m
(s pj )
(s zi )
j 1
K * i1 n
1
(s pj )
j 1
m
n
模值条件: (s zi ) (s pj ) (2k 1)
i1
j1
n
s pj
相角条件: K *
j 1 m
s zi
i 1
相角条件是确定根轨迹的充分必要条件。相角条件满足(2k 1) 称为180º根轨迹。
4-2 绘制根轨迹的基本法则
一、基本法则
1、 根轨迹的起点和终点:
根轨迹起始于开环极点,终止于开环零点;如果开环零点个数少于 开环极点个数,则有(n-m)条根轨迹终止于无穷远处。
起点: K* 0 s pi
K* s p1 s z1
i 1, 2, n
s pn s zm
终点: K* s zi j 1, 2, m
例题:单位反馈系统的开环传递函数为:G(s)H (s) K *(s 1)
s(s 2)(s 3)
试绘制闭环系统的根轨迹
解: 1、开环零点z1=-1,开环极点p1=0,p2=-2,p3=-3, 根轨迹分支数为3条,有两个无穷远的零点。
自动控制原理4 根轨迹法的基本概念

K*
K* 8.16
1.1
pi 71.6
例子4-5 P150
解:1) m=1,n=3,
z1=-20,p1=0,p2=p3=-12, 2)实轴上0--12 ,-12--20 必为根轨迹。 3)渐近线。n-m=2 故有2条渐近线.
G(s) K * (s 20) s(s2 24s 144)
m
n
pi ( pl zi ) ( pl pi )
izl zi )
j 1
jl
p2 1800 56.50 190 590 (108.50 900 370 )
790
z2 1800 1530 1990 1210 63.50 1170 900
(2)闭环极点与开环零点、开环极点以及根轨迹增益均有关。 (需专门研究)
j1
(3)
m
K*
(s z j )
m
(zj)
K limsνG(s) H(s) limsν
(4)根轨迹法 s0
s0
sν
j1 nν
(s
pi )
K*
j1 nν
( pi )
根轨迹图
闭环极点
闭环传递函数
性i 1能指标
i 1
3.根轨迹方程
4-2 根轨迹绘制的基本法则
法则1 根轨迹的起点和终点。 法则2 根轨迹的分支数、对称性和连续性。 法则3 根轨迹的渐近线 法则4 实轴上的根轨迹 法则5 根轨迹的分离点和分离角 法则6 根轨迹的起始角与终止角 法则7 根轨迹与虚轴的交点 法则8 根之和
法则一、根轨迹的对称性、分支数和分布性
1.根轨迹连续且对称于实轴。 2. 根轨迹的分支数与开环有限零点数m与有 限个极点数n中的最大者相等。
[工学]4-1根迹法
![[工学]4-1根迹法](https://img.taocdn.com/s3/m/63967de40b4e767f5bcfcecb.png)
轨迹上对应的Kg值。相角条件是确定s平面上根轨迹的
充要条件,这就是说,绘制根轨迹时,只需要使用相
角条件;而当需要确定根轨迹上各点的Kg值时,才使
用幅值条件。
12
下面看看怎样按上式表示的幅值条件和相角条件绘
制系统的闭环根轨迹图。
j
已知开环零极点分布如图示。
2
p2
在s平面找一点s1 ,
画出各开环零、极点到
根只有实根和复根两种,实根本身位于实轴上,复根
必成对共轭出现,而根轨迹是根的集合,所以必然对
称于实轴。
[证毕]
18
K j
K= 0
K= 0
0
K Kg
j Kg
0
Kg
j
0
19
j
0
j
-21
j
1
0
20
法则3 根轨迹的渐近线:当开环传函中m < n 时, 有n m 条根轨迹分支沿着与实轴交角为a ,交点为a
为阻尼振荡过程。 2
K p% ,但
是
ts不会显著变化。ts
3
n
3 2k
K=0.5 K= 0
1 0
K
9
4.1.3 根轨迹方程
研究下图所示负反馈控制系统的一般结构。
R(s)
C(s)
+﹣
G(s)
H(s)
系统的闭环传递函数为
(s) C(s) G(s)
R(s) 1 G(s)H(s)
该系统的特征方程为: D(s) = 1 + G(s)H(s) = 0
s1点的向量。
z1
1
s1 1
p1 0
3
检验s1是否满足相角条件: p3
第四章根轨迹分析法
j=1
i=1 ≠b
例 设系统开环传递函数零、极点的分布如图4-9所
示,试确定根轨迹离开复数共极点- p1 、- p2的出
射角。
解 按公式(4-28),由作图结果得
øb= +180°(2k+1) + - p1+ z1- - p1+ p2-
jw
- p1+ p3- - p1+ p4
S平面
= +180°(2k+1) +45° -90°-135°-26.6°
根轨迹与虚轴相交,意味着闭环特征方程出现 纯虚根。故可在闭环特征方程中令s=jw,然后令 其实部和虚部分别等于0,从中求得交点的坐标 值及其相应的Kg值。 例 设系统的开环传递函数为
Gk(s)=s(s+1K)g(s+2)
试求根轨迹和虚轴的交点,并计算临界根轨迹增 益Kgp。
解 闭环系统的特征方程为 s(s+1)(s+2)+Kg=0
确定根轨迹上某点对应的K*值
例:开环传函 G(s)H(s)= K ,求根轨迹
(s+1)(s+2)
解 1、确定极点、零点
开环 –p1= -1, –p2= -2
无零点
1、相角条件
∠(s+zi)- ∠(s+pj) = 0-[∠(s+1)+ ∠(s+2)] =±180o(2k+1)
试差法 s= -1.5
∠θ1+ ∠θ2=180 o
故 D’(s)=3s2+6s+2
N’(s)=0
解得 s1=-0.423 s2=-1.577
由于s2不在根轨迹上,因而分离点是s1 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、根轨迹概念:
根轨迹: 当开环系统某一参数从零变到∞时,对
应的闭环系统特征方程的根在 s 平面上变化的轨迹。
根轨迹法: 利用闭环系统的根轨迹来分析系统的
三大性能的方法。
17:19
例1 已知一单位负反馈系统的开环传递函 数为
K G(s) H( s) s(0.5s 1)
试分析该系统的特征方程的根随系统参数K 的变化在s平面上全部可能的分布情况。
第四章 线性系统的 根轨迹法
17:19
本章主要内容
• • • • 4.1 4.2 4.3 4.4 根轨迹法的基本概念 根轨迹的基本规律及绘制 广义根轨迹 系统性能的根轨迹分析法
17:19
没有时域分析法的基础,根轨 迹法只是一个“空中楼阁”。离开 时域分析法来谈根轨迹方法是没有 意义的,所以在学习根轨迹方法的 时候要注意联系时域分析法的知识 和结果。事实上,根轨迹方法只是 时域分析方法的一种辅助图解法。
i 1 i j 1 m * j i j 1 j
f
h
(s p ) K (s z )
i 1
结论:
(1)闭环系统的根轨迹增益 =开环系统前向通路根轨迹 增益。
(2)闭环系统的零点=开环前向通路传递函数的零点+反 馈通路传递函数的极点。
(3)闭环极点与开环零极点、开环根轨迹增益均有关。
s
(K→∞)
17:19
二、用根轨迹分析系统的性能
• 稳定性 根轨迹没有进入右半s平面,闭环系统稳 定。 • 稳态性能 开环传递函数在坐标原点有一个极点, 系统为1型系统,根轨迹上的K值就是静态误差系 数。但是由开环传递函数绘制根轨迹,K*是根轨 迹增益,根轨迹增益 K* 与开环增益 K 之间有一个 m ( zi ) 转换关系。 * i 1
开环系统的根轨迹增益K*与开环系统的增益K之间 仅相差一个比例常数,这个比例常数只与开环传 递函数中的零点和极点有关。
把开环传函化为零极点增益形式也可以得到根轨迹增益K*。
17:19
小结
• • • • 掌握根轨迹和根轨迹法的概念; 理解根轨迹可以用来分析系统的三大性能; 理解开环传函可以反应闭环传函的特征; 掌握根轨迹满足的基本条件。
17:19
三、闭环零极点与开环零极点之间的关系
R( s )
-
G (s)
C (s)
H (s)
前向通路传函:
KG (1s 1)( s 2 1 2 s 1) * KG G( s) s (T1s 1)(T s 2 2T2 s 1)
2 2 2 2 2 2
17:19
s1 1 1 2K , s2 1 1 2 K
K 0.0 0.1 0.2 0.3 0.4
s1,s2 -1±1 -1±0.89 -1±0.77 -1±0.63 -1±0.45
K 1.5 2.0 3.0 4.0 6.0
s1,s2 -1±j1.41 -1±j1.73 -1±j2.24 -1±j2.65 -1±j3.32
17:19
第四章 线性系统的根轨迹法
第一节 根轨迹法的基本概念
17:19
闭环极点分布同单位阶跃响应之间的对应关系
1 G( s ) H ( s ) 0
0 1
0
1 0
1
1
1
1
17:19
问题的提出
从开环传递函数的极零点确定闭环传递函数 的极点,实质上是求解闭环特征方程式的根。 困难:
KK
( p )
j 1 j
n
• 动态性能 由K值变化所对应的闭环极点分布来估 计(定性)。
17:19
说明:
上面用解出闭环特征方程的根,然后
画成曲线得到根轨迹的办法并没有实际意义, 因为这又回到求解高阶代数方程的问题上了。 根轨迹图之所以能被广泛应用,就是因为有 简便的作图方法可以画出根轨迹而不必求解 高阶代数方程。
开环零极点和根轨迹增益
17:19
根轨迹图
闭环极点
分析系统
四、根轨迹满足的基本条件(根轨迹方程) (s z )
m
1 G(s) H (s) 0 G(s) H (s) 1 K *
向量相等必须满足两个条件:
相角条件:
(s p )
i 1 i
j 1 n
j
1e j (2 k 1)
17:19
说明
• 相角条件是确定s平面上根轨迹的充分必要条件。绘 制根轨迹时,只需要使用相角条件。当需要确定根 轨迹上各点的值时,才使用模值条件。
• 知道了根轨迹上的点满足的基本条件,仍实际上还 是不能绘制出根轨迹。
• 要比较快捷的绘制根轨迹,需要找出根轨迹的一些 基本规律。
17:19
※ 根轨迹增益K*与开环增益K的关系
4-1 根轨迹法的基本概念
项目 内容
理解三大性能分析的出发点,掌握根轨迹法的实
教 学 目 的 质,初步理解根轨迹的条件。
教 学 重 点 和模值条件。
掌握根轨迹的基本概念、根轨迹方程、相角条件
深刻理解开环传递函数零极点与闭环传递函数零
教 学 难 点 极点的关系以及根轨迹图上反映出的系统信息。
讲授技巧及注 紧紧依靠时域分析所建立起来的基本概念,尽可 能地用已学过的知识导出新知识。 意事项
1、用解析法求解高次代数方程的根并非易事。 2、当系统中的参数发生变化时,系统特征方程 的系数会发生变化,引起特征方程的根也随之变化, 这就需要进行反复大量的计算,既繁琐又费时。
17:19
一个美好的愿望:
开环传递函数(开环零极点+开环增益) 闭环零极点全部可能的分布图 分析系统的三大类性能
17:19
(s z ) (s p )
i 1 i i 1 q i
f
反馈通路传函:
* H (s) K H
(s z ) (s p )
j 1 j j 1 h j
l
17:19
开环传函:
* * G( s) H ( s) KG KH
(s z ) (s z ) (s p ) (s p )
17:19
0.5
0.6 0.8
-1±0
-1±j0.45 -1±j0.77
10.0
20.0 50.0
-1±j4.36
-1±j6.24 -1±j9.95
1.0
17:19
-1±j1
+∞
-1±j∞
以K为参数的数学曲线可以根据计算的数据表绘出(描点法):
jw
(K→∞) [s]
P1 (K=0) -2
(K=½) -1
P2 (K=0) 0
设K的变化范围是„0,∞),
①当K=0时, s1=0,s2=-2(正好是开环极点); ②当0<K<1/2时,s1与s2为不相等的两个负实根; ③当K=1/2 时,s1=s2=-1 为等实根; ④当1/2<K<∞时,s1和s2为一对共轭复根,其实部 恒等于-1,虚部绝对值随K*值的增加而增加; ⑤当 K→∞时 , s1 和 s2 的实部都等于 -1 ,虚部趋向 无穷远处 。
由第三章,系统的开环增益为
K lim s G (s) H (s)
s 0
m m
K lims G(s) H(s) limK*
s 0 s 0
(s z ) (s p )
i 1 i j1 n j
K*
( z ) ( p )
i 1 i j1 n j
(s z ) (s p ) (2k 1) , (k 0, 1, 2,)
j 1 j i 1 i
m
n
模值条件:
K*
i 1 m j 1
n
s pi
j
sz
注意:s为闭环传函 的特征根 ( 极点 ) , zj 和 pi 为 开 环 传 函 的 零点和极点。
K
n
* G
(s z ) (s p )
i 1 i j 1 m * j i j 1 j
f
h
1 K *
17:19
(s z ) (s p ) K (s z )
j 1 n j i 1 i 1 i
(s p )
K ( s )
n
* G
(s z ) (s p )
i 1 i j 1 j
f
f
l
i 1 q
i
j 1 h
j
K*
(s z ) (s p )
i 1 i j 1 n j
m
闭环传函:
K G (s) ( s) 1 G ( s) H ( s)
* G
(s z ) (s p )
i 1 m i i 1 q i
17:19
解:系统的闭环传递函数
C(s) G(s) 2K (s) 2 R(s) 1 G(s) H(s) s 2 s 2 K
系统的特征方程为
s 2 2s 2 K 0
特征方程的根是
s1 = 1 1- 2K , s2 1 1 2K
17:19
讨论: s1 1 1 2K , s2 1 1 2K