六自由度排爆机器人操作臂运动学分析
六自由度柔性机械臂的运动学分析毕业设计论文

六自由度柔性机械臂的运动学分析毕业设计论文简介本毕业设计论文旨在对六自由度柔性机械臂的运动学进行分析。
柔性机械臂在工业自动化和机器人领域具有广泛的应用前景。
通过研究机械臂的运动学,可以深入了解其运动特性和参数,为进一步的控制和优化提供基础。
研究目标1. 分析六自由度柔性机械臂的关节运动学以及末端执行器的位置和姿态。
2. 研究不同控制参数对机械臂运动学的影响。
3. 探究柔性杆件对机械臂运动学的影响。
4. 比较刚性机械臂和柔性机械臂的运动学性能。
方法1. 建立六自由度柔性机械臂的数学模型。
2. 使用逆运动学方法求解关节角度。
3. 应用运动学方程计算末端执行器的位置和姿态。
4. 进行仿真实验,验证模型和算法的准确性和可行性。
研究成果1. 描述六自由度柔性机械臂的关节运动学和末端执行器的运动学。
2. 对机械臂运动特性进行分析和讨论。
3. 提出柔性杆件对机械臂运动学性能的影响。
4. 比较刚性机械臂和柔性机械臂的运动学性能差异。
结论本毕业设计论文对六自由度柔性机械臂的运动学进行了详细分析和研究,揭示了机械臂运动特性和柔性杆件对其性能的影响。
研究结果对于机械臂的控制和优化具有重要意义,对进一步发展柔性机械臂技术具有一定的指导作用。
参考文献[1] Author 1, Author 2. (Year). Title of Paper 1. Journal Name, Volume(Issue), page range.[2] Author 3, Author 4. (Year). Title of Paper 2. Conference Name, page range.。
六自由度机器人运动学分析
六自由度机器人运动学分析殷固密,王建生(五邑大学智能制造学部,广东江门529020)0引言随着中国制造2025和工业4.0的提出与发展,机器人在“机器换人”和提高社会生产力中扮演着不可或缺的重要位置。
为了使机器人平稳准确地完成指定任务,机器人的运动学分析是必不可少的。
其中,机器人运动学分析的基础就是D-H 参数建立和正逆运动学求解及验证。
通过基础分析,可以帮我们了解机器人的工作方法,揭示机构的合理运动方案和控制算法。
结合使用仿真软件的计算可视化,可以更直观地体现机器人的设计效果,及时发现缺点和不足并改正。
以库卡机器人KR16-2,一种末端三关节轴线相交于一点的六自由度工业机器人为研究对象,通过Craig 和Spong 两种不同的D-H 法则(全称Denavit-Hartenber)对该机器人机型进行运动学建模,推导出机器人正逆运动学模型,并利用MATLA 及Robotics Toolbox 进行运动学分析仿真验证。
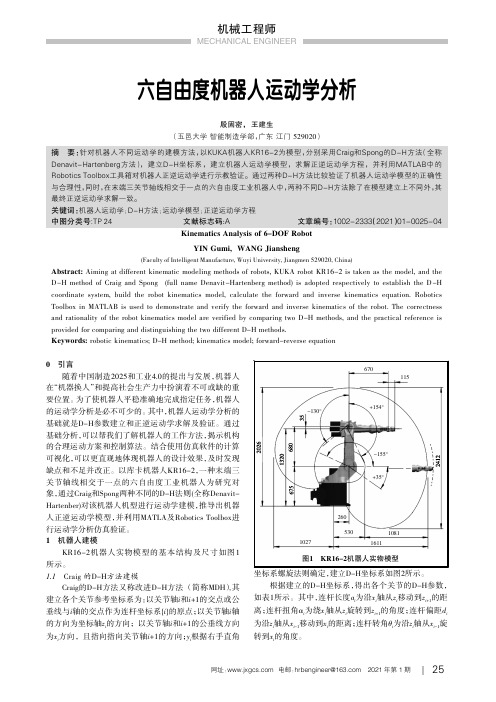
1机器人建模KR16-2机器人实物模型的基本结构及尺寸如图1所示。
1.1Craig 的D-H 方法建模Craig 的D-H 方法又称改进D-H 方法(简称MDH ),其建立各个关节参考坐标系为:以关节轴i 和i+1的交点或公垂线与i 轴的交点作为连杆坐标系{i }的原点;以关节轴i 轴的方向为坐标轴z i 的方向;以关节轴i 和i+1的公垂线方向为x i 方向,且指向指向关节轴i+1的方向;y i 根据右手直角坐标系螺旋法则确定,建立D-H 坐标系如图2所示。
根据建立的D-H 坐标系,得出各个关节的D-H 参数,如表1所示。
其中,连杆长度a i 为沿x i 轴从z i 移动到z i+1的距离;连杆扭角αi 为绕x i 轴从z i 旋转到z i +1的角度;连杆偏距d i 为沿z i 轴从x i -1移动到x i 的距离;连杆转角θi 为沿z i 轴从x i -1旋转到x i 的角度。
摘要:针对机器人不同运动学的建模方法,以KUKA机器人KR16-2为模型,分别采用Craig和Spong的D-H方法(全称Denavit-Hartenberg方法),建立D-H坐标系,建立机器人运动学模型,求解正逆运动学方程,并利用MATLAB中的Robotics Toolbox工具箱对机器人正逆运动学进行示教验证。
6自由度机械手的算法

6自由度机械手的算法介绍6自由度机械手是一种具有6个自由度的机械臂,可以在空间中完成复杂的运动任务。
为了实现机械手的精确控制和运动规划,需要使用一系列算法来实现。
本文将探讨6自由度机械手的算法,包括逆运动学、正运动学、轨迹规划等。
逆运动学逆运动学是指已知机械手末端位置和姿态,计算出各个关节角度的过程。
对于6自由度机械手而言,逆运动学问题是一个复杂的数学问题。
以下是逆运动学算法的基本步骤:1.确定机械手的DH参数,包括关节长度、关节偏移、关节旋转角度等。
2.根据机械手的DH参数,构建正运动学方程,即末端位置和关节角度的关系。
3.根据末端位置和姿态,求解正运动学方程,得到关节角度的解。
4.对于多解的情况,选择最优解,例如使关节角度变化最小或满足特定约束条件的解。
正运动学正运动学是指已知机械手各个关节角度,计算出末端位置和姿态的过程。
对于6自由度机械手而言,正运动学问题相对简单,可以通过矩阵变换来实现。
以下是正运动学算法的基本步骤:1.确定机械手的DH参数。
2.根据机械手的DH参数,构建正运动学方程,即关节角度和末端位置的关系。
3.根据关节角度,求解正运动学方程,得到末端位置的解。
轨迹规划轨迹规划是指在给定起始位置和目标位置的情况下,确定机械手的运动路径和速度的过程。
对于6自由度机械手而言,轨迹规划需要考虑运动的平滑性和避免碰撞等因素。
以下是轨迹规划算法的基本步骤:1.确定起始位置和目标位置。
2.根据起始位置和目标位置,计算出机械手的途径点和运动方向。
3.根据途径点和运动方向,生成平滑的运动路径。
4.考虑机械手的运动速度和加速度,生成合适的速度曲线。
5.考虑碰撞检测,避免机械手和其他物体的碰撞。
动力学建模动力学建模是指根据机械手的结构和参数,建立机械手的运动学和动力学模型的过程。
对于6自由度机械手而言,动力学建模需要考虑关节间的耦合效应和惯性等因素。
以下是动力学建模的基本步骤:1.确定机械手的质量、惯性等参数。
六自由度机械手实验报告 (2)
六自由度机械手实验报告学院:机械工程学院专业:机械设计制造及其自动化班级:机自114学号:********学生姓名:郭2014年12月30日六自由度机械手实验报告一、机械手介绍六自由度机器手是由六个关节组成,每个关节上安装一个电动机,通过控制每个电动机旋转,就可以实现机械手臂的空间运动。
本实验做的六自由度的机械手臂是能实现物品的抓取和移位的机械自动控制机构。
该六自由度机械手臂的底座能进行大角度转动,实现机械抓取物体的移位;关节的俯仰和摆动能实现机械手臂不同位置的抓取物体;手部关节部分关节的变换,手腕的末端安装一机械手,机械手具有开闭能力,能实现物体的抓取和放下。
每个关节自由度都是用电动机转动来实现机械手臂的转动、俯仰和摆动等运动。
六自由度机械手臂每个关节处都有一个小型电机控制,分别能实现个关节的转动、俯仰等动作。
各个电机用采用AT89S52单片机片控制,通过单片机输出程能实现六个电机按照规定角度运动,从而带动关节的运动。
二、机械手的结构1、机械部分本实验中六自由度机械手的机械系统包括机身、臂部、手腕、手部。
图1机械手臂的实物图图2机械手臂的结构简图系统共有6个自由度,分别是a.基座的回转、b.连杆一转动、c.连杆二转动、d..手腕转动、e.手腕旋转、f..手部开合。
前面三个关节确定手部的空间位置,后面三个关节确定手部的姿态。
图3 自由度2、控制部分1、人机通信模块控制系统是机器人的大脑,它的性能优劣直接影响到机器人的先进程度和功能强弱。
机械人控制涉及自动控制,计算机,传感器、人工智能、电子技术和机械等多学科的内容,是一项跨多个学科的综合性技术。
本实验机器人控制系统的硬件由单片机AT89S52、运动控制模块、驱动模块和通讯模块组成。
其单片机AT89S52模块如下图3.1所示,该模块由一块AT89S52单片机、串行口通信接口、转串口下载线连接接头、电源接口、开关、信号输出口Q等组成。
图4 单片机AT89S52模块图2、舵机驱动模块该舵机驱动模块采用的是parallax公司生产的16路舵机控制模块,其包括16路舵机控制线接口、单片机通信接口、舵机驱动电源接口、开关、复位键、控制芯片等部分组成。
(完整版)六自由度机器人结构设计

六自由度机器人结构设计、运动学分析及仿真学科:机电一体化姓名:袁杰指导老师:鹿毅答辩日期: 2012.6摘要近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。
我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在生产线或加工设备旁边作业的,本论文作者在参考大量文献资料的基础上,结合项目的要求,设计了一种小型的、固定在AGV 上以实现移动的六自由度串联机器人。
首先,作者针对机器人的设计要求提出了多个方案,对其进行分析比较,选择其中最优的方案进行了结构设计;同时进行了运动学分析,用D-H 方法建立了坐标变换矩阵,推算了运动方程的正、逆解;用矢量积法推导了速度雅可比矩阵,并计算了包括腕点在内的一些点的位移和速度;然后借助坐标变换矩阵进行工作空间分析,作出了实际工作空间的轴剖面。
这些工作为移动式机器人的结构设计、动力学分析和运动控制提供了依据。
最后用ADAMS 软件进行了机器人手臂的运动学仿真,并对其结果进行了分析,对在机械设计中使用虚拟样机技术做了尝试,积累了经验。
第1 章绪论1.1 我国机器人研究现状机器人是一种能够进行编程,并在自动控制下执行某种操作或移动作业任务的机械装置。
机器人技术综合了机械工程、电子工程、计算机技术、自动控制及人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表,是当代科技发展最活跃的领域。
机器人的研究、制造和应用正受到越来越多的国家的重视。
近十几年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。
我国是从 20 世纪80 年代开始涉足机器人领域的研究和应用的。
1986年,我国开展了“七五”机器人攻关计划。
1987 年,我国的“863”计划将机器人方面的研究列入其中。
目前,我国从事机器人的应用开发的主要是高校和有关科研院所。
六自由度机械手的坐标建立及运动学分析
六自由度机械手的坐标建立及运动学分析1.坐标建立:在六自由度机械手的坐标建立中,一般采用DH约定法(Denavit-Hartenberg法)来建立坐标系。
DH法是一种常用的方法,能够简化坐标系的描述,方便运动学分析。
首先,根据机械手的实际结构和运动方式,确定基座系(O-1-X1-Y1-Z1)和工具系(O-6-X6-Y6-Z6)两个坐标系。
其中,基座系固定在机械手的基座上,而工具系固定在机械手臂的末端执行器部分。
然后,根据机械手的连杆关系,逐个确定每个连杆的坐标系。
对于每个连杆的坐标系,可以通过以下几个步骤确定:1)确定连杆旋转轴,选择旋转轴为Z轴。
2)确定连杆的连杆中心线与相邻连杆中心线的夹角,选择夹角为连杆坐标系的转角θ。
3)确定连杆坐标系的原点与相邻连杆坐标系的原点之间的距离,选择距离为连杆坐标系的运动方向z。
4)确定连杆坐标系的x轴,通过右手定则确定。
根据以上步骤,可以逐个确定各个连杆的坐标系,最终建立整个六自由度机械手的坐标系。
2.运动学分析:运动学正解是指通过给定每个关节的转角,计算末端执行器的位置和姿态。
运动学正解的计算可以采用连乘法则,从基座系逐步向前计算每个连杆的变换矩阵,最终得到末端执行器的变换矩阵。
运动学逆解是指通过给定末端执行器的位置和姿态,计算每个关节的转角。
运动学逆解的计算可以通过逆运动学方法实现,其中一种常用的方法是通过解析法,通过求解多元非线性方程组得到关节转角的解析解。
在进行运动学分析时,还需要考虑机械手的工作空间限制、奇异位置的问题以及碰撞检测等。
因此,在实际运动学分析中,可能需要进行机器人的轨迹规划和路径规划。
总结:六自由度机械手的坐标建立和运动学分析是机械手设计和控制的基础。
通过建立机械手的坐标系,可以方便地描述六自由度机械手的结构和运动方式。
而运动学分析可以通过运动学正解和逆解,实现机械手的位置和姿态的计算。
熟练掌握六自由度机械手的坐标建立和运动学分析,对于机械手的设计和控制具有重要意义。
通用型六自由度工业机器人的运动学分析

通用型六自由度工业机器人的运动学分析作者:杨煜俊陈洵凛来源:《科技资讯》2017年第03期摘要:针对六自由度工业机器人运动学分析和轨迹规划过程中的计算烦琐问题,以通用型六自由度工业机器人为研究对象,在Matlab环境下,利用Robotics Toolbox工具箱对该机器人进行运动学建模,并建立该机器人的D-H模型,对其进行运动学求解和轨迹规划与仿真。
实验表明,Robotics Toolbox工具箱极大地简化了通用型六自由度工业机器人运动学分析的正、逆解的求解过程,并且能直观地显示机器人的运动特性、参数和轨迹。
对通用型这类六自由度工业机器人的研究与应用具有重要的价值。
关键词:工业机器人 Robotics Toolbox 运动学求解轨迹规划仿真中图分类号:TP391.9 文献标识码:A 文章编号:1672-3791(2017)01(c)-0097-04机器人是当代新科技的代表产物,是高新技术的代表。
随着计算机技术的发展,机器人科学与技术也得到了迅速发展。
在工业机器人的研究中,由于其价格昂贵,对用实物机器人进行实践学习的普及难度较大,因此机器人的软件仿真实验变得非常重要。
对机器人进行软件仿真实验,可以模拟出机器人的运动情况图像,更加直观地显示了机器人的运动参数与轨迹特征,从而有利于分析很多重要的信息。
在机器人的运动仿真这块,很多学者都进行了相关的研究。
例如:文献[1]以一个五自由度护理机器人为例,利用Robotics Toolbox工具箱对其进行运动学建模与求解;文献[2]以一个SCARA机器人为例,利用Robotics Toolbox工具箱来讨论标准D-H参数和改进D-H参数建模方法的区别,并对其轨迹规划仿真;文献[3]以Cincinnati T3-746机器人为例,对其运动学轨迹规划进行了分析与仿真,但以上所建立的机器人模型只能适用于相应的机器人运动学研究。
一种通用的、能通过简单修改便可适用于任何一种通用型六自由度工业机器人的仿真方法显得尤其重要。
六自由度机器人运动学及主要构件的有限元分析
第6期2021年2月No.6February ,2021六自由度机器人运动学及主要构件的有限元分析摘要:文章以六自由度机器人为研究对象,根据实际的作业情况,对机器人进行运动学分析以及主要构件的有限元分析。
运动学分析分为正运动学分析和逆运动学分析,解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
有限元分析主要是机械系统静力学分析。
对主要构件建立模型、模型简化、网格划分,根据危险工况的受力情况,分析了各构件的应力、形变等性能,确保结构设计合理。
对于工业机器人机械结构、传动等方面,运动学和有限元分析能够判断整机设计是否达到设计目标,对结构件的优化设计具有重要的意义。
关键词:六自由度;机器人;运动学;有限元分析中图分类号:TP242.2文献标志码:A 程锴(南京以禾电子科技有限公司,江苏南京210039)作者简介:程锴(1981—),男,江苏南京人,工程师,硕士;研究方向:电子产品总体结构设计。
江苏科技信息Jiangsu Science &Technology Information引言在当前科学技术不断进步和快速发展的背景下,很多先进的技术手段被广泛应用在各个领域中[1]。
特别是机器人在工业中得到广泛的应用,在实际运行过程中,类似于码垛搬运的六自由度机器人在搬运货物中节省大量劳动力,但安全性与可靠性一直备受考验。
因此,本文主要对六自由度机器人进行运动学和静力学分析[2]。
机器人运动学研究解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
运动学方程是进行机器人位移分析的基本方程,也称为位姿方程。
机器人运动学分为正运动学分析和逆运动学分析。
正运动学是机器人运用各个关节角度、各个构件车长度等已知条件来判断末端执行器在三维空间中的位置;而逆运动学正好相反,它解决的是机器人需要如何运动才能使得末端执行器到达指定位置这一问题。
静力学分析用来分析结构在给定静力载荷作用下的响应。