最优控制1-2
西工大最优控制课程 第1章 变分法-2-欧拉方程

3 泛函求极值的一般步骤
问题:由 min J ( y) x1 F (x, y(x), y'(x))dx 求 yˆ, J ( yˆ)
y
x0
(1)由EULER方程
d
Fy
dx
(
F y
'
)
0
解出y的通解。
(2)由横截条件求出
F y
'
0
的表达式。
(3)将边值条件代入y的通解与
F y
'
0
求出积分常数,得到 yˆ
当一个端点固定时(假定x0固定)
F y x1 y' x0
Fy'y
x1
Fy'y x0
y(x0 ) 0
Fy'y x1 0Fy' x1 0
y(x0 ) y0
横截条件
F y x1 y' x0
0
当两个端点均可变时
y
y1(x)
y*(x)
δy1
δy0
y2(x)
F y x1 y' x0
Fy'y
x1
x1 0(横截条件)
x0
写成向量形式
t f
t0
(δy)T (Fy
d dx
Fy )dx (δy)T
Fy
x1 x0
0
标量函数F对y的一阶偏导
梯度向量,列向量
向量形式
tf t0
(δy)T (Fy
d dx
Fy )dx (δy)T
Fy
x1 x0
0
n维列向量
泛函极值存在的必要条件:
Fy
d dx
Fy
0
函数极值存在的必要条件
线性二次型最优控制应用举例与仿真
线性二次型最优控制一、最优控制概述最优控制,又称无穷维最优化或动态最优化,是现代控制理论的最基本,最核心的部分。
它所研究的中心问题是:如何根据受控系统的动态特性,去选择控制规律,才能使得系统按照一定的技术要求进行运转,并使得描述系统性能或品质的某个“指标”在一定的意义下达到最优值。
最优控制问题有四个关键点:受控对象为动态系统;初始与终端条件(时间和状态);性能指标以及容许控制。
一个典型的最优控制问题描述如下:被控系统的状态方程和初始条件给定,同时给定目标函数。
然后寻找一个可行的控制方法使系统从输出状态过渡到目标状态,并达到最优的性能指标。
系统最优性能指标和品质在特定条件下的最优值是以泛函极值的形式来表示。
因此求解最优控制问题归结为求具有约束条件的泛函极值问题,属于变分学范畴。
变分法、最大值原理(最小值原理)和动态规划是最优控制理论的基本内容和常用方法。
庞特里亚金极大值原理、贝尔曼动态规划以及卡尔曼线性二次型最优控制是在约束条件下获得最优解的三个强有力的工具,应用于大部分最优控制问题。
尤其是线性二次型最优控制,因为其在数学上和工程上实现简单,故其有很大的工程实用价值。
二、线性二次型最优控制2.1 线性二次型问题概述线性二次型最优控制问题,也叫LQ 问题。
它是指线性系统具有二次型性能指标的最优控制问题。
线性二次型问题所得到的最优控制规律是状态变量的反馈形式,便于计算和工程实现。
它能兼顾系统性能指标的多方面因素。
例如快速性、能量消耗、终端准确性、灵敏度和稳定性等。
线性二次型最优控制目标是使性能指标J 取得极小值, 其实质是用不大的控制来保持比较小的误差,从而达到所用能量和误差综合最优的目的。
2.2 线性二次型问题的提法给定线性时变系统的状态方程和输出方程如下:()()()()()()()()X t A t X t B t U t Y t C t X t ⎧=+⎨=⎩ (2.1))(t X 是n 维状态变量,)(t U 是m 维控制变量,)(t Y 是l 维输出变量,)(t A 是n n ⨯时变矩阵,)(t B 是m n ⨯时变矩阵。
第二部分最优控制理论习题答案

x c1 , x c1t c2 (通解形式)
由边界条件
x(0) c2 1 c1 1 , 解之,得 x(1) c1 c2 2 c2 1
*
故最优轨线为 x (t ) t 1
2-2、求一阶系统 x(t ) u(t ), x(0) 1,当性能指标为 J
构造哈密顿函数: H x1 u12 u2 2 1 u1 2 ( x1 u2 ) 最优轨线 x1* (t ) t , x2* (t ) 0.5t 2 0.5t 最优控制 u1* 1 , u2* 0.5
2-8、 设二阶系统状态方程为 x1 x1 u,
x2 (1) ,
1
故
H H 1 2 , 2 0, x1 x2
1 1 2 11 c1et c2 Nhomakorabea c2
由横截条件
1 (1)
0, 2 (1) 1 x1 (1) x2 (1)
那么 所以
代入边界条件
x(0) 1 (c1 c2 1)
,
(1) 0
(c1e c2e 0)
1
, [终端横截条件 t f
] x(t f )
得 c1 0.12, c2 0.88
最优轨线 x* (t ) 0.12et 0.88et 最优控制 u* (t ) 0.12et 0.88et
-1
最优轨线是齐次方程 x x 的解
x(t ) [ A BR1BT K ]x(t )
由 x(0) 1 ,解得: x (t ) e
* t
所以: u (t ) e
最优控制_2
u (t ) 为p维控制向量,在[t0,tf] 上分段连续
f ( x (t ), u (t ), t ) 为n维连续向量函数, 对x和t连续可微
⎡ f1(x(t),u(t),t)⎤ ⎡ f1(x1(t), x2 (t)Lxn (t),u1(t),u2 (t)Lup (t),t)⎤ ⎢ f (x(t),u(t),t)⎥ ⎢ f (x (t), x (t)Lx (t),u (t),u (t)Lu (t),t)⎥ 2 n 1 2 p ⎥ ⎥=⎢ 2 1 &(t) = f (x(t),u(t),t) = ⎢ 2 x ⎥ ⎢ ⎥ ⎢ M M ⎥ ⎢ ⎥ ⎢ f x t x t L x t u t u t L u t t ( ( ), ( ) ( ), ( ), ( ) ( ), ) f x t u t t ( ( ), ( ), ) ⎥ 2 n 1 2 p ⎣ n ⎦ ⎢ ⎣ n 1 ⎦
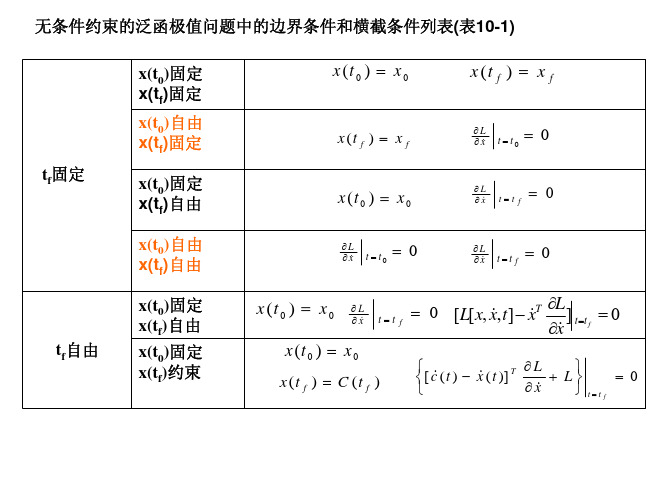
无条件约束的泛函极值问题中的边界条件和横截条件列表(表10-1) x(t0)固定 x(tf)固定 x(t0)自由 x(tf)固定 tf固定 x(t0)固定 x(tf)自由 x(t0)自由 x(tf)自由 x(t0)固定 x(tf)自由 tf自由 x(t0)固定 x(tf)约束
x (t 0 ) = x 0
∂L ∂x d − dt ∂L & ∂x
=0
T t0
T ( ∂∂L ) & x t
f
L δx(t f ) − ( ∂ &) ∂x
δx(t0 ) = 0
& , λ , t ) = g ( x, x &, t ) + λT f ( x, x &, t ) L ( x, x
λ (t ) ∈ R n 称为拉格朗日乘子
最 优 控 制 教 案2.6.2 末端时刻自由时的最优解

2.6.2末端时刻自由时的最优解[]0(),(),(),ft f f t J x t t L x t u t t dt ϕ⎡⎤=+⎣⎦∫[]00(),(),()0,()f x t u t t xt x t x −== (),0f f x t t ⎡⎤Ψ=⎣⎦引入拉格朗日乘子向量:(),()f t V t λ 构造如下广义泛函[]{}0(),()[(),](),(),()()ft T Ta f f f f f t J x t t V t x t t L x t u t t t f x dt ϕλ⎡⎤=+Ψ++−⎣⎦∫ J a 与J 等价 定义如下哈密尔顿函数(,,,)(,,)()(,,)T H x u t L x u t t f x u t λλ=+[()][()]()ft T T a f f t J x t V x t H xdt ϕλ=+Ψ+−∫ 其中 000()()()()fffft t t t TT T T T T t f f t t t xdtx xdt t x t t x t xdt λλλλλλ−=−+=−+∫∫∫ 000[()][()]()()()()()ft T T T T a f f f f t J x t V x t t x t t x t H x dt ϕλλλ=+Ψ−+++∫ 对J a 取一次变分,可得由(),(),f x t u t t δδδ所引起变分,其中(),()t V t λ不变分,且0()0x t δ=()()()()()()()()()(()f f TTTT T a f f f f ff f f f t T T T t f t J V t x t V t x t t x t x t t t H H H x t x t u t dt x u ϕϕδλδλδλδλδδ⎡⎤⎡⎤∂∂Ψ∂∂Ψ=+−++−⎢⎥⎢⎥∂∂∂∂⎢⎥⎢⎥⎣⎦⎣⎦∂∂⎡⎤+++++⎢⎥∂∂⎣⎦∫ 0()()()()()()f T TT TTT t a f f f t f f f f H H J V t x t V H t x t u t dt x t x t t t x u ϕϕδλδδλδδ⎡⎤⎡⎤⎡⎤∂∂Ψ∂∂Ψ∂∂⎛⎞⎛⎞=+−++++++⎢⎥⎢⎥⎢⎥⎜⎟⎜⎟∂∂∂∂∂∂⎝⎠⎝⎠⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦∫由泛函极值定理可得δJ a =0, 考虑到(),,(),()f f x t t x t u t δδδδ的任意性有 (),0,()(),()()T f f f f H H t t V t x u x t x t ϕλλ∂∂∂∂Ψ=−==+∂∂∂∂ ()()T f f f f H t V t t t ϕ⎛⎞∂∂Ψ=−+⎜⎟⎜⎟∂∂⎝⎠(1) 末端受约束情况泛函取极值的必要条件(,,,)(,,)()(,,)T H x u t L x u t t f x u t λλ=+ ① 正则方程 ()()H xt H t xλλ∂=∂∂=−∂ ② 控制方程0Hu ∂=∂ ③边界条件 00()(),0()()()()f f Tf f f f x t x x t t t V t x t x t ϕλ=⎡⎤Ψ=⎣⎦∂∂Ψ=+∂∂④哈密尔顿函数在最有曲线末端满足 ()()T f f f f H t V t t t ϕ⎛⎞∂∂Ψ=−+⎜⎟⎜⎟∂∂⎝⎠(2) 末端自由情况①正则方程 ()()Hxt H t xλλ∂=∂∂=−∂ ②控制方程0Hu ∂=∂ ③边界条件00()()()f f x t x t x t ϕλ=∂=∂④哈密尔顿函数满足()f fH t t ϕ∂=−∂(3)末端固定情况 ()0f x t δ=①正则方程 ()()Hxt H t xλλ∂=∂∂=−∂ ②控制方程0Hu∂=∂ ③边界条件 00()()f fx t x x t x ==④哈密尔顿函数满足 ()f fH t t ϕ∂=−∂例题2.19 设一阶系统方程为 ()()xt u t = ,性能指标为21()2f t f J t u t dt =+∫,t f 自由,求最优控制u *(t),使系统由x(0)=1转移到x(t f )=0,并使性能指标为极小值。
【国家自然科学基金】_线性二次型最优控制_基金支持热词逐年推荐_【万方软件创新助手】_20140731

推荐指数 4 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 242 33 34 35 36 37 38 39 40 41 42 43 44
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78
扩展kalman滤波器 1 性能蜕化 1 微力传感器 1 微分方程解 1 建模 1 平衡截断 1 工程结构 1 奇异摄动法 1 增广线性二次型最优调节控制器(alqr) 1 地震响应 1 可控性 1 双轮半衡机器人 1 双向直流变换器 1 卫星运载火箭 1 动态性能 1 前馈-反馈控制 1 冗余输入 1 倒向 1 保成本控制 1 仿真 1 taylor级数 1 t-s模糊模型 1 on-off控制 1 lqg控制 1 h_∞扰动抑制水平 1 h2最优控制 1
科研热词 推荐指数 最优控制 4 线性二次型 2 磁流变式调谐液柱阻尼器 2 滚动时域 2 混沌 2 性能指标 2 实验 2 地震控制 2 半主动控制 2 动力方程 2 减震效果指标 2 二级倒立摆 2 markov跳变系统 2 lq控制 2 风力发电机组 1 颤振主动抑制 1 频域 1 非线性系统 1 随机控制系统 1 遗传算法 1 迭代学习 1 跳变模态 1 跟踪控制 1 超级电容 1 误差反馈控制 1 航空发动机 1 自适应模型 1 自适应增益调度 1 线性矩阵不等式 1 线性二次最优控制 1 线性二次型高斯最优控制 1 线性二次型调节器 1 电子电力变压器 1 电压瞬时中断 1 汽车悬架 1 气动弹性 1 模糊终端滑模控制 1 模型降阶 1 柔性空间机械臂 1 柔忡 1 有限记忆控制 1 有限维空间 1 有效风速估计 1 最优控制问题 1 智能悬臂梁 1 时滞系统 1 时滞 1 无偏条件 1 控制变量 1 振动控制 1 振动抑制 1 扩散项 1
最 优 控 制 教 案第四章 线性二次型性能指标的最优控制问题
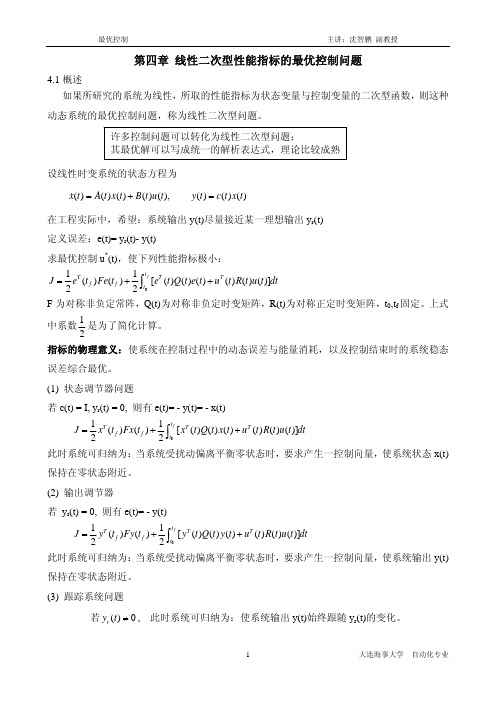
许多控制问题可以转化为线性二次型问题;其最优解可以写成统一的解析表达式,理论比较成熟第四章 线性二次型性能指标的最优控制问题4.1概述如果所研究的系统为线性,所取的性能指标为状态变量与控制变量的二次型函数,则这种动态系统的最优控制问题,称为线性二次型问题。
设线性时变系统的状态方程为()()()()(),()()()xt A t x t B t u t y t c t x t =+=在工程实际中,希望:系统输出y(t)尽量接近某一理想输出y r (t) 定义误差:e(t)= y r (t)- y(t)求最优控制u *(t),使下列性能指标极小:11()()[()()()()()()]22ft T T T f f t J e t Fe t e t Q t e t u t R t u t dt =++∫F 为对称非负定常阵,Q(t)为对称非负定时变矩阵,R(t)为对称正定时变矩阵,t 0,t f 固定。
上式中系数21是为了简化计算。
指标的物理意义:使系统在控制过程中的动态误差与能量消耗,以及控制结束时的系统稳态误差综合最优。
(1) 状态调节器问题若c(t) = I, y r (t) = 0, 则有e(t)= - y(t)= - x(t)11()()[()()()()()()]22f t T TT f f t J x t Fx t x t Q t x t u t R t u t dt =++∫此时系统可归纳为:当系统受扰动偏离平衡零状态时,要求产生一控制向量,使系统状态x(t)保持在零状态附近。
(2) 输出调节器若 y r (t) = 0, 则有e(t)= - y(t)11()()[()()()()()()]22ft T T T f f t J y t Fy t y t Q t y t u t R t u t dt =++∫ 此时系统可归纳为:当系统受扰动偏离平衡零状态时,要求产生一控制向量,使系统输出y(t)保持在零状态附近。
二阶系统的最优控制
二阶系统的最优控制Ξ肖 滨(海军潜艇学院 青岛 266071) 摘 要 应用最优控制理论验证了二阶系统最优控制为典型的Bang 2Bang 控制,通过理论推导得出了其相轨迹,并讨论了二阶系统最优控制的实现。
关键词 最优控制 二阶系统 Bang 2Bang 控制The Opti m al Con trol of Second -Order SystemX iao B in(N avy S ub m arine A cad e m y ,Q ing d ao ,266071) ABSTRACT T h is paper demo strated that the op ti m al contro l of second 2o rder system is the typ ical Bang 2Bang contro l by app lying the Op ti m al Contro l T heo ry .T he state track about th is contro l m ethod is obtained also by using theo ry inference ,and how to realize the op ti m al contro l of second 2o rder system is discussed deep ly at last .KEY WOR D S op ti m al contro l ,second 2o rder system ,Bang 2Bang contro l在雷达声纳等控制系统中,都涉及到目标自动搜索及跟踪问题,而其控制一般都采用闭环自动控制和调整实现,对于二阶系统而言,如何获得最优控制,使系统动态性能达到最快速的跟踪控制效果,一直是人们所关注的问题。
二阶系统的传递函数为 H (S )=k mS (S T m +1)(1)采用图1所示的闭环控制后,其传递函数为H (S )=K m T mS 2+S T m +K m T m (2)图2是二阶闭环系统阶跃响应曲线,可以看出:当系统阻尼太大时,系统响应时间长;而当系统阻尼太小时,输出超调量又太大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常数a可依据横截条件确定。由(1-45)式,得,
(1 x ) x 1 x 2 1 x 2 0
L [c (t ) x (t )] L 0 x
c (t ) 1, L x x 1 x 2
化简后得
x 1
0
(1-35)
tˆf ( t f ) L[ x ˆ (t ) tˆf
(t ), x (t ) (t ),t ]dt
由极值的必要条件
J ( x)
0
0
推知
L L ˆf ), x ˆf ), t ˆf ] 0 (1-36) (t ) ]dt (t f ) L[ x ˆ (t ˆ (t t0 [ (t ) x x
x(t ) x ˆ (t ) (t )
(1-33)
是包含极值轨线 x ˆ (t ) 在内的一束邻近曲线,其对应的终端为
[t f , x (t f )] 。
因终端时刻tf是变动的,也就是 说,每一条轨线都有其各自的终端时 刻tf, 故而必须定义一与x(tf)相应的终 端时刻集合:
t f tˆf (t f )
2015/12/1
L d L 0 由欧拉方程知 x dt x d x 0 2 dt 1 x x c 2 1 x
稍加整理,得
x c 1 c
2
a
于是
x at b
(1-46)
式中a和b均为任意常数。
13
2015/12/1
因t=0时,x=1,故得b=1,于是
取极值的必要条件,是轨线x (t ) 满足下列方程:
L d L 0 x dt x
欧拉方程 横截条件
(1-44)
且当t tˆf 时有
[c (t ) x (t )]
c (t )
其中
x (t )
L L0 x
(1-45)
应有连续的二阶导数,L至少应两次连续可微,
上面我们讨论了 起点固定而终点变动 时求极值轨线 的问 题,当终点固定而起点变动 或起点和终点都变动 时,可用类 似的方法进行研究。
11
2015/12/1
例 1-2 求从平面上一点x(0) 1 至直线 x(t f ) c(t f ) 2 t f 取
最短距离的轨线。 (导弹拦截问题简化情况)
tˆf t0
8
2015/12/1
由于 (t ) 的任意性,以及 (t f ) 的任意性,必有
L d L 0 x dt x
(1-41) (1-42)
L [ c ( t ) x ( t )] L 0 x t tˆf
9
2015/12/1
3
2015/12/1
方程(1-32) 和(1-1) 形式上 是相同的。 差别在于:(1-32)式中的 tf 不是固定的,而是变动的。 这从图 1-3 可以看得很清楚, 对于不同的轨线 x(t) ,其终 态 x(tf) 和与之相应的时刻 tf 通常是互异的。
4
2015/12/1
设x ˆ (t f )] ,而 ˆ (t ) 是所求的极值轨线,其对应的终端为[tˆf , x
寻找一条连续可微的极值轨线,它由给定的点 (t0 , x0) 到给定的曲线x(tf)=c(tf)上的点[tf , c(tf)],使性能泛函
J ( x ) t L[ x (t ), x (t ),t ]dt
0
tf
(1-32)
达到极值,其中tf是一待定的量,x(t)有连续的二阶导数,L 是两次连续可微函数。
tˆf t0
L[ x ˆ (tˆf ), x ˆ (tˆf ), tˆf ] L d L ]dt (t f ){[ c (tˆf ) x ˆ (tˆf )] (t )[ x dt x x (1-40) L[ x ˆ (tˆf ), x ˆ (tˆf ), tˆf ]} 0
解 已知弧线元长度
ds ( dt ) 2 ( dx) 2 1 x 2 dt
故由图1-4可见,本例是求
J ( x ) t f 1 x 2 dt
0
t
取极小值的轨线x (t ) 。
2 L 1 x 其中,
L 0 x
12
L x x 1 x 2
§1-2 变动端点的变分问题
1
2015/12/1
轨线的始端或终端是变动的
绪论中所讲的拦截问题,便是一个终端变动的变分问 题。 分析一下拦截器运动的轨线,可知其在发射时刻 t0 的状态是已知的,而为使拦截器达到拦截的目的,其终态 必须在目标行进的轨道上与导弹 M 相遇。
2
2015/12/1
问题1-2
为负倒数,因而它们互相垂直。由此可得结论:直线c外一 点到该直线的最短距离,是由该点到直线c的垂线。
15
2015/12/1
下面研究n维空间中变动端点的变分问题。
定理 1-4 设 n 维状态向量 x(t ) [ x1 (t ), x2 (t ),..., xn (t )]T
的轨线自一固定点 x(t0 ) [ x1 (t0 ), x2 (t0 ),..., xn (t0 )]T 到达给定 的曲面 x(t f ) c(t f ) 上某一点c(t ) [c1 (t f ), c2 (t f ),..., cn (t f )]T , 则性能泛函
ˆf t
6
2015/12/1
对上式中被积函数的第二项进行分部积分
ˆf t ˆf L L d L t ( t ) d t ( t ) ( t ) dt t0 t0 t0 x x d tx ˆf t
注意(t0 ) 0 ,则(1-36)式便化为
与固定端点的区别
L d L L ˆ ]dt (t f ) t0 (t )[ x dt x t tˆ x f (t f ) L[ x ˆ (tˆf ), x ˆ (tˆf ), tˆf ] 0
tˆf
(1-37)
注意: (tˆf ) 和 (t f ) 不是相互独立的,它们受条件 x(t ) |t t f c(t f ) 的约束,即
T
(1-50)
(t ), t ] 是一数量函数, 其中 x (t ) 应有连续的二阶导数;L[ x (t ), x c (t ) 则应有连续的一阶导数。 它至少应两次连续可微;而
定理1-4的叙述和证明过程,与定理1-3的叙述和证明过 程极其相似。
172015/12/1而来自则应有连续的一阶导数。
2015/12/1
10
方程(1-44) 是我们以前讲过的欧拉方程; 方程(1-45) 则是极值轨线x ˆ (t ) 的终态所应满足的条件。 因极值轨线 x ˆ (t ) 和曲线 x(t f ) c(t f ) 总是相割而非相切, 所以人们给方程 (1-45) 取了一个形象化的名称,叫做 “横截 条件” 。
(1-34)
2015/12/1
5
把关系式(1-33)和(1-34)代入(1-32)式,得
J ( x) t f
0
tˆ ( t f ) tˆ
L[ x ˆ (t ) (t ), x (t ) (t ),t ]dt
t f L[ x ˆ (t ) (t ), x (t ) (t ),t ]dt
(t f ) x ˆ (tˆf ) (tˆf ) (t f )c (tˆf )
即
(tˆf ) (t f )[ c (tˆf ) x ˆ (tˆf )]
(1-39)
将关系式(1-39)代入(1-37)式,就得到
L[ x ˆ (tˆf ), x ˆ (tˆf ), tˆf ] L d L ]dt (t f )[ c (tˆf ) x ˆ (tˆf )] (t )[ x dt x x (t f ) L[ x ˆ (tˆf ), x ˆ (tˆf ), tˆf ] 0
x ˆ[tˆf (t f )] [tˆf (t f )] c[tˆf (t f )]
(1-38)
7
2015/12/1
ˆf (t f )] [t ˆf (t f )] c[t ˆf (t f )] x ˆ[t
将(1-38)式对求导,并令 0 ,得
于是a=1,最终得极值轨线
x t 1
(1-47)
14
2015/12/1
结论: 1)在 tx 平面上, (1-46)式是直线方程。如在平面上任选 两点,即可求出任意常数a, b的值,而直线方程也就随之 确定。可见连接平面上任意两点的最短线是直线。
1 , 而 直 线 2) 由 (l-47) 式 知 极 值 轨 线 的 斜 率 是x 1 ,可见直线 c (t f ) 2 t f 的斜率则是c x(t ) 和c(t f ) 的斜率互
J ( x ) t f L[ x (t ), x (t ), t ]dt
0
t
(1-48)
取极值的必要条件, 是轨线x(t ) 满足下列向量微分方程:
L d L 0 x dt x
欧拉方程
(1-49)
2015/12/1
16
横截条件
且当 t tˆ f 时有
L [c L0 (t ) x (t )] x
定理1-3
设 轨 线 从 x (t ) 自 一 给 定 的 点(t0 , x0 ) 到 达 给 定 曲 线
x (t f ) c (t f ) 上某一点[t f , c(t f )] ,则使性能泛函
J ( x ) t f L[ x (t ), x (t ), t ]dt
0
t
(1-43)