泵控并联变量马达速度系统复合控制策略_郑琦
变频泵控马达调速系统遗传算法PID控制

变频泵控马达调速系统遗传算法PID控制变频泵控马达调速系统遗传算法PI D 控制彭天好,徐 兵,杨华勇PID C ontrol of Pum p 2control 2m otor S peed G overning System withInverter Based on G enetic Alg orithmsPeng T ian 2hao ,Xu Bing ,Y ang Hua 2y ong(浙江⼤学流体传动及控制国家重点实验室,浙江杭州 310027)摘 要:提出了基于遗传算法的变频泵控马达调速系统的PI D 参数寻优⽅法。
仿真结果证明了遗传算法寻优后的PI D 控制器较常规PI D 控制器具有更好的控制特性,对模型失配和负载扰动表现出更强的适应性和鲁棒性,很适合具有慢时变和存在负载扰动的变频泵控马达调速系统的控制。
也指出了⽤遗传算法寻优变频泵控马达调速系统PI D 参数的局限性。
关键词:变频泵控马达;调速系统;遗传算法;寻优;PI D 控制中图分类号:TP214 ⽂献标识码:B ⽂章编号:100024858(2003)1120001203 收稿⽇期:2003204221 基⾦项⽬:国家⾃然科学基⾦资助项⽬(N o 159835160) 作者简介:彭天好(1964—),男,江西波阳⼈,副教授,博⼠⽣,主要研究⽅向为机电系统的控制和液压动⼒系统的节能等。
0 引⾔电机变频调速技术依靠改变供电电源的频率就可实现对执⾏机构的速度调节,将电机变频调速技术⽤于液压系统,可以克服液压系统的⼀些缺点,如简化液压回路,减少液压系统的能量损失,提⾼系统效率,降低噪声等。
其中最重要的是减少液压系统的能量损失(包括溢流损失和节流损失),提⾼整个系统的效率。
传统的PI D 调节器以其结构简单,对模型误差具有⼀定的鲁棒性及易于操作等优点,所以⽬前尽管有许多先进的控制⽅法,但PI D 调节器仍是最普遍采⽤的控制器。
在PI D 控制中,控制效果的好坏完全取决于PI D 参数的整定与优化。
【国家自然科学基金】_二阶滑模_基金支持热词逐年推荐_【万方软件创新助手】_20140802

推荐指数 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8 9 10 1鲁棒性 1 非线性 1 铁损模型 1 解耦 1 离散扩张状态观测器 1 磁悬浮 1 滑模变结构 1 数据驱动 1 效率优化 1 感应电机 1 二阶离散滑模变结构控制 1 二阶动态滑模 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49
科研热词 滑模控制 齐次理论 鲁棒控制 鲁棒性 高超声速滑翔飞行器 领导者-跟随者 非线性积分 静液传动 近空间飞行器 轨迹跟踪 调速器 船舶电站 终端滑模控制 线性矩阵不等式 线性化 积分滤波器 滑模干扰观测器 滑模变结构控制 滑模变结构 渐近稳定性 泵控并联变量马达 永磁同步电机 欠驱动航天器 欠驱动水面船舶 机器人编队 有限时间稳定性 有限时间收敛 有限时间估计 抖振 扰动观测器 扩张状态观测器 打滑 恒压网络 径向基函数神经网络 广义逆 广义双线性系统 容积控制 姿态调节控制 同步发电机 双幂次指数趋近率 参数不确定性 包容控制 分散控制 二阶滑模控制 二阶滑模变结构控制 tornambe控制 lyapunov方法 l2干扰抑制 backstepping
推荐指数 4 4 3 3 3 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
起重机泵阀协同复合控制液压系统能效特性分析
第52卷第2期2021年2月中南大学学报(自然科学版)Journal of Central South University (Science and Technology)V ol.52No.2Feb.2021起重机泵阀协同复合控制液压系统能效特性分析都佳1,肖刚2,杨敬1,权龙1(1.太原理工大学机械与运载工程学院,山西太原,030024;2.徐工集团江苏徐州工程机械研究院,江苏徐州,221004)摘要:建立以电子压力补偿原理为基础的起重机泵阀协同复合控制液压系统。
首先,对起重机典型负载原理进行分析,提出一种以手柄开度信号为阈值的多模式控制策略,即在快速运动模式中采用主阀阀口全开,通过控制电液比例泵斜盘摆角控制进入执行器流量,在微动模式中实时控制主阀阀口开度及电液比例泵斜盘摆角,通过阀芯位置、压力的闭环控制实现流量精准匹配。
其次,采用AMESim 软件,建立传统抗流量饱和负载敏感液压系统仿真模型,并通过试验验证仿真模型的准确性。
最后,建立起重机泵阀协同复合控制液压系统AMESim 仿真模型。
研究结果表明,与传统抗流量饱和负载敏感液压系统相比,泵阀协同复合控制液压系统在变幅联单动作微动模式下系统能耗降低约2.74%,变幅联单动作快速运动模式下系统能耗降低约9.23%,变幅联和卷扬联复合运动模式下系统能耗降低约10.60%。
关键词:工程机械;液压系统;抗流量饱和;泵阀协同;电子压力补偿;AMESim 仿真模型;能效特性中图分类号:TH137文献标志码:A开放科学(资源服务)标识码(OSID)文章编号:1672-7207(2021)02-0389-11Energy efficiency characteristics analysis for crane hydraulicsystem of pump-valve coordinated composite controlDU Jia 1,XIAO Gang 2,YANG Jing 1,QUAN Long 1(1.College of Mechanical and Vehicle Engineering,Taiyuan University of Technology,Taiyuan 030024,China;2.Jiangsu Xuzhou Construction Machinery Research Institute,Xuzhou 221004,China)Abstract:A pump-valve coordinated composite control hydraulic system(PVCS)based on the principle of electronic pressure compensation was established.Firstly,the typical load principle of cranes was analyzed,and a multi-mode control strategy with the handle opening signal as a threshold was proposed.In the rapid motion mode,DOI:10.11817/j.issn.1672-7207.2021.02.007收稿日期:2020−05−13;修回日期:2020−07−22基金项目(Foundation item):国家重点研发计划项目(2018YFB2001203);山西省重点研发计划项目(201903D111007);国家自然科学基金山西煤基低碳基金联合资助项目(U1920211)(Project(2018YFB2001203)supported by the National Key Research and Development Program of China;Project(201903D111007)supported by the Key Research and Development Program of Shanxi Province;Project(U1920211)supported by the National Natural Science Foundation of China &Shanxi Coal-based Low Carbon Foundation)通信作者:杨敬,博士,副教授,从事工程机械液压节能系统与功率匹配研究;E-mall:********************.cn引用格式:都佳,肖刚,杨敬,等.起重机泵阀协同复合控制液压系统能效特性分析[J].中南大学学报(自然科学版),2021,52(2):389−399.Citation:DU Jia,XIAO Gang,YANG Jing,et al.Energy efficiency characteristics analysis for crane hydraulic system of pump-valve coordinated composite control[J].Journal of Central South University(Science and Technology),2021,52(2):389−399.第52卷中南大学学报(自然科学版)the main valve was fully opened,and the flow rate into the actuator was controlled by controlling the displacementof the electro-hydraulic proportional pump.In the micro-motion mode,the opening of the main valve port and the displacement of the electro-hydraulic proportional pump were controlled in real time.The accurate flow matching was achieved through the closed-loop control of the spool position and pressure.Secondly,the AMESim simulation model of the LSHS was established and the accurateness of the simulation model was verified by experiments.Finally,the AMESim simulation model of the PVCS was established.The results show that compared with the LSHS,the PVCS reduces the system power consumption by about2.74%in the single-action micro-motion mode.The system power consumption is reduced by about9.23%in the single-action rapid motion mode with lifting cylinder,and the system power consumption is reduced by about10.60%in the combined motion mode of the lifting cylinder and winch motor.Key words:construction machinery;hydraulic system;flow-saturated resistant;pump-valve coordination; electronic pressure compensation;AMESim simulation model;energy efficiency analysis目前,工程机械领域尤其是起重机的液压系统普遍采用传统抗流量饱和负载敏感系统。
液压泵控马达调速复合控制系统研究
o n L Q t h e o r y a n d d y n a m i c r o b u s t c o mp e n s a t i o n me t h o d .T he s i mu l a t i o n r e s u l t s s h o w t h a t u s i n g t h e c o m p o u n d c o n t r o l l e r .t h e s t a t i c - e r _
W U Di ,
( 1 .S c h o o l o f E g i n e e r i n g a n d T e c h n o l o g y ,X i c h a n g C o l l e g e ,X i c h a n g S i c h u a n 6 1 5 0 0 0 ,C h i n a ; 2 . S c h o o l o f M a n u f a c t u i r n g S c i e n c e a n d E n g i n e e i r n g ,S i c h u a n U n i v e r s i t y ,C h e n g d u S i c h u a n 6 1 0 0 6 5 ,C h i n a )
关键词 :液压泵控马达 ;电液伺服系统 ;最优二次型控制 ;动态鲁棒补偿 中图分类号 :T H 1 3 7 . 1 文献标识码 :A 文章编号 :1 0 0 1— 3 8 8 1( 2 0 1 3 )5— 0 7 5—3
S t ud y o n t he Co m po u nd S p e e d Co n t r o l S y s t e m o f Hy dr a u l i c Pum p— mo t o r
变频恒压供水系统的Smith预估复合控制

( C o l l e g e E l e c t r o n i c s &I n f o r ma t i o n E n g i n e e r i n g , C h a n g s h a U n i v e r s i t y o f S c i e n c e& T e c h n o l o g y ,
C h a n g s h a 4 1 0 0 7 6 , C h i n a )
Ab s t r a c t :A P I D— f u z z y c o n t r o l s t r a t e g y wi t h S mi t h p r e d i c t o r wa s p r o p o s e d f o r t h e c o n s t a n t p r e s s u r e w a t e r s u p p l y s y s t e m ,w h i c o n l i n e a it r y,r a n d o mi c i t y ,l a r g e i n e r t i a a n d b i g d e l a y .T h i s c o n t r o l s t r a t e y g c o mb i n e d t h e a d v a n t a g e s o f g o o d d y n a mi c r e s p o n s e o f f u z z y c o n t r o l ,h i g h r e g u l a t i o n a c c u r a c y o f P I D c o n t r o l a n d p u r e l a g c o mp e n s a t i o n o f S mi t h p r e d i c t o r .On t h e b a s i s o f r e t a i n i n g t h e s y s t e m’ S s t a t i o n a r i t y,d y n a mi c p r o c e s s a n d s t e a d y s t a t e p e r f o r ma n c e ,t h i s c o n t r o l s t r a t e g y c o u l d e v i d e n t l y i mp r o v e t h e s p e e d a b i l i t y o f d y n a mi c p r o c e s s ,h a d g o o d r o b u s t n e s s a n d w e l l a d a p t a b i l i t y t o v a i r a t i o n a l mo d e l p a r a me t e r s .T h e s i mu l a t i o n r e s u l t s s h o w e d t h a t P I D— f u z z y c o n t r o l s t r a t e y g wi t h S mi t h p r e d i c t o r c o u l d ma k e t h e d y n a mi c a n d s t e a d y p e f r o ma r n c e o f c o n s t a n t p r e s s u r e wa t e r s u p p l y s y s t e m b e t t e r t h a n c o n v e n t i o n  ̄ P I D c o n t r o l ,f u z z y c o n t r o l a n d P I D— f u z z y i n t e g r a t e d c o n t r o 1 . Ke y wo r d s :v a r i a b l e f r e q u e n c y c o n s t a n t p r e s s u r e;P I D c o n t r o l ;f u z z y c o n t r o l ;S i t m h p r e d i c t i v e c o n t r o l
全液控变量泵复合控制功能的仿真分析_薛亚峰

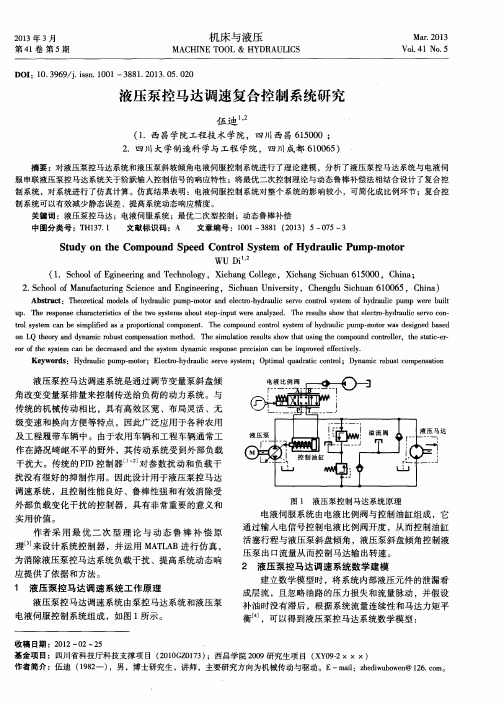
1)在 7 s 时间附近,工作压力上升为 16 MPa,达 到恒功率设定的起始控制压力,输出流量以压力增加 的相同比例减少;10 s 时工作压力达到最大值,流量 不再变化。12 s 时,工作压力开始下降,输出流量以 压力下降的相同比例增加,12.5 s 时间附近,工作压力 下降为 16 MPa,流量上升为最大值,12.5 s~20 s 时间 内,工作压力低于恒功率设定的起始控制压力,输出 流量不再变化。
参数 10 mm | 0 mm 190 N/mm | 165 N 0.002 kg | 0.003 m 10 mm | 8.5 mm
2 mm 10 mm | 0 mm
1 0.002-x 6 mm | 5 mm 1 N/mm | 5 N 1 mm 5 mm 10 mm | 8.5 mm -2 mm
图 8 恒功率控制机构仿真模型图
1 -1/0.035 35 mm | 0 mm 3 N/mm | 25 N 0.5 kg | -0.035 m
1/ m
2 负载敏感控制功能
由图 1 中负载敏感阀的工作原理建立其结构模
型[5],如图 3 所示,p 口接变量泵工作压力 p0 ,A 口接 变量活塞腔,T 口接油箱,X 口接负载反馈压力 pL 。
lever1_2(斜盘) bhr1_3(变量活塞阻尼孔)
pump03_2(变量泵) signal03_2(电机输入信号)
pmover01v(电机) elect01_2(斜盘位移转换函数)
bap3_2_2(变量活塞)
spring stiffness | spring force at zero displacement distance port 1 | 2to pivot equivalent orifice diameter pump displacement output at start of stage 1 | 2
离心泵机组并联调速优化运行的数值解法
收稿日期: 2007- 11 - 19 基金项目: 兰州理工大学 / 学术梯队及特色研究方向重点资助计划 0项目 ( T200303 ); 兰州理工大学硕士基金资助项目 ( 0212 )
作者简介: 韩 伟 ( 1977) ) , 男, 安徽砀山人, 讲师, 博士研究生 ( hanw e@i lu t. cn) , 主要从事流体机械及工程多相流的研究.
[
( k1
nc12
/K
c 1
)
0.
5
+
( k2 nc22
/K
c 2
)
0.
5
]
2
考虑管路水力损失后泵站的管路折引特性为
H G = H ST + SBD Q 2 1. 2 多泵并联运行功耗分析
( 8)
单泵功率
Pi
=
QgQ i H G
i
=
CQ i H i G
( 9)
式中 C为输送流体的重度; 泵效率 [ 5 ] 为
2
P i = P 1 + P2 =
i= 1
C Q 1H 1 G1
+
Q 2H G2
2
=
C Q 1 (H K1 -
s
+
SAB
Q
2 1
)
0.
4 4Q
1
0.
32
+
Q 2 (H K2 -
s+
SCB
Q
2 2
)
0.
4
4Q
2
0.
32
( 15)
2 并联调速优化运行的数学模型
2. 1 并联调速优化运行数学建模
泵站系统约束条件: 泵站系统的流量 Q s、扬程
泵控马达复合调速系统控制

t l i o r
在A s MEi 面建 立 变频器 及 电机 的仿真模 型 。 m里
12 系统 控 制 方 案 .
V< : 系统需 要 加 速 , 变频 器 驱 动 电机 转 速增
加, 电液 比例方 向 阀保 持最 大开 口 ; V> : 系统需 要 减速 ,变频 器 驱动 电机 转 速下
摘要 : 介绍了泵控马达变转速节流复合调速 系统 的工作原理及结构 , 建立了系统 的 A s - i uik的联合仿真模 ME i Sm l m n 型, 提出了泵控马达变转速节流复合调速系统的控制策略 , 并进行 了仿真分析。 关键词: 泵控 马达 ; 调速系统 ; 复合调速 ; 控制
中图分类号 :H17 T 3
O a ̄t ttt
gm a ̄ i l i l 毒 豳 e 曲 k, . r ¥ 材 。 l
k
出到定子侧的电流频率为 0H 0H 。依据[ , z5 z 1 异 】
步 电机 的 电磁 转矩公 式 :
r 一 U1 pK1 一 = UI
I mΒιβλιοθήκη 一 t 嘲 Sj tk
第4 ( 期 总第 4 期) 1
21 0 0年 7月
温体.动与 传 控利
F u d P we a mis o n o t l I i o rTrns s i n a d C n r o
泵控 马达 复合调 速 系统控 制
刘佳 东 彭天 好 朱刘 英 胡佑 兰
( 徽 理工 大 学 机 械 工程 学 院 安徽 淮 南 2 2 0 安 3 0 1)
2 。主回路部分采用典型的泵控马达变转速节流复 ) 合 调 速 系 统 , 制 部 分采 用 闭环 控 制 结构 , 备较 控 具 强的抗干扰能力 。系统工作时 , 利用控制器操纵复 合 调速 系统 , 系统 的被 控 制量 等 于 给定值 或 给定 使 信 号 变化规 律去变 化 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5 期
郑
琦等: 泵控并联变量马达速度系统复合控制策略
693
滑模变结构控制律以提高系统鲁棒性, 取得了良 好的控制效果, 但研究对象限于负载可测或小扰 4 - 5] 动系统. 文献[ 提出了基于局部线性化的模 但未考虑变量机构的动态特 型参考自适应控制, 性. 泵控并联马达系统是多变量系统, 需协调多 1, 4]通过维持回路 个调节变量间的关系. 文献[ 期望 流 量 平 衡 来 协 调 泵 和 马 达 的 排 量 , 体现了 “按需供给” 的思想. 考虑到马达的液压转矩为系 统压力和排量的乘积, 本文尝试通过变量泵对系 统压力进行动态控制, 使其与马达排量调节形成 “合力” , 改善系统动态性能. 同时, 在变量马达调 速控制器设计中, 引入扰动观测器, 提高了其稳态 性能.
· s1 = e 1 + c1 e1
马达调速系统中的负载扰动主要由液压转矩 克服. 引入扰动观测器对扰动进行补偿 , 可有效提 . 考察马达调速系 高系统的动态和稳态性能 d , 统扰动项 2j 其不仅与未知负载转矩有关, 还与 . 系统压力波动有关 前文提出对系统压力进行动 则必然引入扰动. 为了克服上述两方面因 态调节, 6]给出的方法设计扰 素引起的扰动, 采用文献[ 动观测器, 结构如图 3 所示.
0920 ; 网络出版时间: 20120522 16 : 03 收稿日期: 2011网络出版地址: www. cnki. net / kcms / detail /11. 2625. V. 20120522. 1603. 013. html 61004024 ) ; 高等学校博士点科研基金资助项目( 20080061061 ) 基金项目: 国家自然科学基金资助项目( 51075016 , saviorzq@ qq. com. 作者简介: 郑 琦( 1984 - ) , 男, 安徽芜湖人, 博士生,
G mj ( s) —系统实际模型传函; G Nmj ( s) —系统名义模型传函; Q n ( s) —低通滤波器.
n
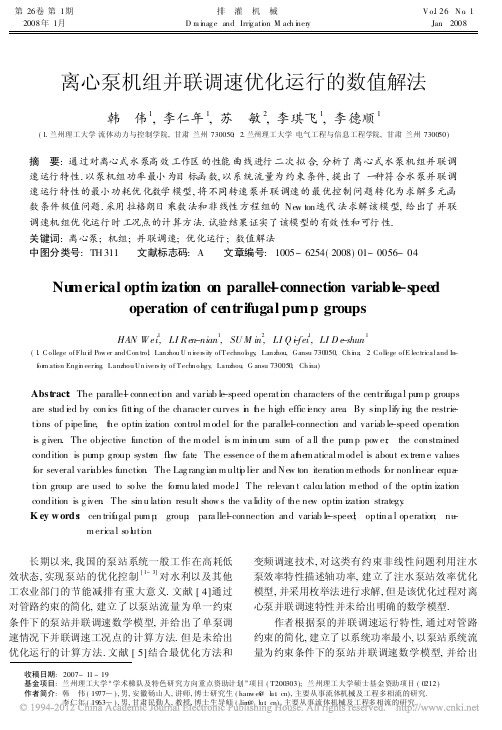
图 1 为变量泵控并联变量马达系统的闭式结 构原理图.
p d = p base + K pd ∑ ( ω mdj - ω mj )
j =1
( 5)
p base 为压力期望的基值, 式中, 是系统稳定运行时 可依经验给定, 此时维持系统压力 的压力期望值, 稳 定, 可 降 低 管 路 故 障 和 泄 漏 污 染;
要: 针对泵控并联变量马达速度系统中的流量自适应分配特性和相乘非线性环
节, 提出了分别通过变量泵实现系统压力控制和变量马达实现所驱动轴的转速控制的复合控 制架构. 针对泵控压力系统和变量马达调速系统分别推导了二阶线性化模型 . 为实现系统压力 动态调节, 提出了期望压力规划方法, 并设计了滑模控制器. 通过在变量马达调速 PID ( Proportion Integration Differentiation) 控制器引入扰动观测器, 抑制了非线性扰动和未知负载扰动, 提 高了波动压力下的稳态精度. 结合双轴驱动车辆行走驱动转速系统设计了复合控制器 , 仿真结 果确认了所提出的复合控制策略的有效性 . 词: 容积控制; 滑模控制; 线性化; 扰动观测器; 泵控并联变量马达 中图分类号: TH 137. 31 ; TP 273. 3 关 键 文献标识码: A 5965 ( 2012 ) 05069205 文 章 编 号: 1001-
节输出转速, 通过各马达期望转速和实测转速的 综合得到期望压力, 系统架构规划如图 2 所示.
ω dj —马达 j 的期望转速; p d —期望压力.
图2
泵控并联变量马达系统结构规划图
2
2. 1
泵控压力系统设计
期望压力规划
1
基本描述
通过系统压力的调节辅助马达排量调节, 可 使马达转速响应达到更好的动态效果. 在泵控并 联变量马达系统中, 每个变量马达的运动状态均 需综合整体的响应情况. 这里基于偏差控制 不同, 思想对期望压力进行规划, 规划算法如下:
n
图1
并联变量马达系统结构原理图
[1 ]
K pd ∑ ( ω mdj - ω mj ) 为压力期望的动态部分, 综合
j =1
泵控并联变量马达系统各环节数学模型 为 Tp Dp + Dp = Kp ip V0 · p + Ct p + βe
· · n ·
各马达转速偏差而定, 如此动态调节系统期望压 K pd 为单位转 力, 可加快各马达的动态响应. 其中, 速偏差对应的系统期望压力动态值 . 另外, 需将压力期望的时间变化率约束在工 程可实现且安全范围之内, 即 · a pd1 ≤ p d ≤ a pd2
D p 为变量泵排量; i p 为变量泵变量机构控 式中, 制电流; T p 为泵变量机构时间常数; K p 为泵变量机 构电流排量增益; p 为泵两腔压力差; ω p 为变量 泵转速; V0 为回路容积; β e 为油液弹性模量; C t 为 回路总体泄漏系数; j 为系统中马达序号; D mj 为变 量马达排量; ω mj 为变量马达转速; i mj 为马达变量 机构控制电流; i max j 为马达变量机构最大控制电 流; T mj 为马达变量机构时间常数; K mj 为马达变量 排量增益; J mj 为归算至马达轴上的转动 机构电流惯量; B mj 为马达轴上阻尼系数; T Lj 为马达轴上负 载转矩. 本文采用变量泵控制系统压力, 变量马达调
电液比例变量泵控并联变量马达系统是一种 闭式结构的容积控制系统, 具有调速范围大、 传动 平稳、 抗污染和适应分布式负载等特点 , 已在重型 车辆及工程机械和履带式装甲车等上得到广泛应 用. 由于该系统具有流量自适应分配特点和数学
模型存在排量与压力和排量与角速度的相乘非线 性环节, 现有的数学模型和控制方案尚不能准确 描述系统特征并获得满意控制效果. 针对电液容 1 - 3] 积控制系统的相乘非线性问题, 文献[ 采用 并在其基础上设计 了状态反馈精确线性化方法,
[6 - 9 ]
( 10 ) ( 11 )
对式( 11 ) 求导, 得
· · · · s 1 = e 1 + c1 e 1 = · · d · p + c1 e ( 12 ) 1 + a1 x2 + a0 x1 + d1 - k1 u1
构造指数趋近律滑模控制器: u1 =
· ρ1 sgn( s1 ) + q1 s1 + p + c1 e 1 + a1 x2 + a0 x1 + d1 k1 · · d
·
( 1) ( 2) ( 3) ( 4)
ω mj D mj ∑ j =1
= ωp Dp
( 6)
T mj D mj + D mj = K mj ( i max j - i mj ) J mj ω mj + B mj ω mj + T L j = D mj p
a pd1 和 a pd 2 分别为 p d 的下限和上限, 其中, 有 a pd1 < 0, a pd2 > 0 . 2. 2 变量泵控压力系统模型线性化 由式( 2 ) 可得 Dp = 1 V0 · p + Ct p + ωp βe
· x 1 · 2
0
0
0 0 + [ ]u + [ ] [ ] ]d -a k -1 x 1 x1
2 1 1 1
3. 2
1
基于扰动观测器的变量马达调速控制
( 9) 2. 3 变量泵控压力系统滑模变结构控制 针对变量泵控压力系统, 这里采用滑模变结 构控制律设计控制器. 定义跟踪误差为 e1 = p d - p = p d - x 1 构造滑模流型为
· βe n · ( Tp ω mj D mj + T p ω mj D mj + ω mj D mj ) . T p V0 ∑ j =1
· x2 = x 令 x1 = p , 将式 ( 8 ) 写为能控标准型 1,
状态空间方程形式:
Байду номын сангаас
694
北 京 航 空 航 天 大 学 学 报
2012 年
[x ] = [ - a
2012 年 5 月 第 38 卷 第 5 期
北京航空航天大学学报 Journal of Beijing University of Aeronautics and Astronautics
May 2012 Vol. 38 No. 5
泵控并联变量马达速度系统复合控制策略
郑
摘
琦
李运华
杨丽曼
( 北京航空航天大学 自动化科学与电气工程学院,北京 100191 )
Abstract: Addressing the adaptive characteristics of the flow rate and the multiplying nonlinearity in the pumpcontrolledparallelvariabledisplacementmotor speed system,a kind of compound control architecture was proposed,in which the pressure is controlled by on the variable displacement pump and the rotational speed of each driving axle is controlled by variable displacement motor respectively. The 2order linearized models of the pumpcontrolledpressuresystem and the motorspeedcontrolsystem were derived. A pressure planning algorithm and a sliding mode control law were presented for the dynamic regulating of pressure. By means of introducing of the disturbance observer to the motor proportion integration differentiation controller, the nonlinear disturbance and unknown load disturbance can be restrained,so as to promote the steady precision under fluctuant pressure. The compound controller for a 1pump2motor system of the transporter was designed. The simulation verifies validity of the proposed compound control strategy. Key words: volume control; sliding mode control; linearization; disturbance observer; pumpcontrolledparallelvariabledisplacementmotor