第二章 机电传动系统的动力学基础分析
第1第2章机电传动动力学基础(第三版)PPT课件

3.“机电传动控制”课程的性质和任 务
1) 课程性质 该课程是机械类专业的一门必修的专业基础课,是机
电一体化人才所需电知识的驱体.它将电机,电器,继电器 -接触器控制,PLC,电力电子技术,自动调速系统有机地 结合在一起. 2) 课程内容 全书13章,分为5个单元: (1)机电传动系统的动力学基础和过渡过程; (2)电机及继电器-接触器控制系统; (3)可编程序控制器; (4)电力电子技术的基本知识; (5)自动调速系统.
7
3) 课程学习任务 掌握继电器-接触器控制系统的工作原理和元件选择, 掌握PLC的编程方法与应用, 掌握闭环控制系统的工作原理与性能及其应用场所. 了解电力拖动的一般知识, 了解最新电气控制技术在生产机械上的应用.
8
阅读书目:
1.齐占庆主编.机床电气控制技术(第三版).北京:机械 工业出版社.2004年6月.
折算时,可以折算到电动机轴上(高速轴),也可以折 算至低速轴上.
17
旋转运动
直线运动
三轴旋转运动折算至电动机轴上
1.负载转矩的折算
TL
TL/ C
式中,
c -传动效率;
式中,速比
j1
nM n1
jL
nM nL
3.飞轮转矩的折算
GDZ2GDM2GjD 1212GjD L2L2
2.转动惯量的折算
机电传动控制(第三版)
邓星钟 主编
“机电传动控制(第三版)”多媒体课件 湖南理工学院张万奎 2005年
1
整体概况
概况一
点击此处输入 相关文本内容
01
概况二
点击此处输入 相关文本内容
02
概况三
点击此处输入 相关文本内容
03
2机电传动系统的动力学基础

n f (TL )
n
TL K / n
T 恒功率型机械特性
0
郑州大学远程教育学院
第二章 机电传动系统的动力学基础
2.4 机电传动系统稳定运行的条件
系统稳定运行的充要条件
(1)两机械特性有交叉点;
Sm (2)Δn为在平衡点处的转速变 化, 当Δn>0时,TM<TL TM-TL<0; 当Δn<0时,TM>TL TM-TL>0 a点是稳定平衡点,b点不是。
2. 机电传动系统的 动力学基础
2.1 2.2 2.3 2.4 机电传动系统的运动方程式 负载转矩、转动惯量和飞轮转矩的折算 机电传动系统的负载特性 机电传动系统稳定运行的条件
郑州大学远程教育学院
第二章 机电传动系统的动力学基础
2.0 重点和难点
重点:
1.运用运动方程式分别判别机电传动系统的运行状态。 2.运用稳定运行的条件来判别机电传动系统的稳定运行点。
难点:
1. 根据机电传动系统中 TM 、TL、n 的方向确定 TM 、TL 是拖动转 矩还是制动转矩,从而判别出系统的运行状态,是处于加速、 减速还是匀速; 2. 在机械特性上判别系统稳定工作点时、如何找出 TM 、TL
郑州大学远程教育学院
第二章 机电传动系统的动力学基础
n f (TL )
n
TL
TL C
n
-TL
例: TL T 提升机构; 帯式运输机; 金属切削机床等(a)反抗转矩
( 摩擦转矩)
T
(b)位能转矩 (因重力产生的转矩)
(T与n的方向恒为相反)
(T的方向恒定与无关)
郑州大学远程教育学院
2 动力学基础解析

d TM TL J dt 2 dn J 60 dt
四、TM、TL 、n的参考方向 因为电动机和生产机械以共同的转速旋转,所以,一般以ω (或n)的转动方向为参考来确定转矩的正负。 拖动转距促进运动;制动转距阻碍运动。
d TM TL J 当TL的实际作用方向与n的方向 dt 相同时,取与n相反的符号; 2 dn J 60 dt 当TL的实际作用方向与n的方向 相反时,取与n相同的符号;
M j —传动机构的总传动比 L
三、转动惯量和飞轮转矩的折算 由于转动惯量和飞轮转矩和运动系统的动能有关,因此折算 的原则是:动能守恒原则。 1.旋转运动 折算到电动机轴上的 总转动惯量为
J1 J L JZ JM 2 2 j1 j L
JM 、J1、JL为电动机、中间轴、生产机械轴上的转动惯量 j1—电动机与中间轴之间的速比
设重物上升时 速度n的符号为正, 下降时n的符号为 负。
2 dn TL TM J 60 dt
TM为制动转矩 TL为拖动转矩
2.2 多轴拖动系统的简化 一、多轴拖动系统的组成 电动机通过减速机与生产机械相连。
旋转运动
直线运动
为了对多轴拖动系统进行运行状态的分析,一般是将多轴拖动 系统等效折算为单轴系统 , 再用单轴系统的分析方法分析多轴系统。
2.1 单轴拖动系统的运动方程式 一、单轴拖动系统的组成 电动机 电动机的驱动对象
连接件 系统结构图 转距方向 电动机M通过连接件直接与生产机械相连,由电动机M产生输 出转矩TM,用来克服负载转矩TL ,带动生产机械以角速度ω(或速 度n)进行运动。
二、运动方程式 在机电系统中,同一根轴上 根据动力学原理: TM 、 TL 、(或 n) 之间的函数关系 称为运动方程式。 ……运动方程式 ……转矩平衡方程式 n ─ 速度(r/min)
机电传动控制课后习题答案《第五版》
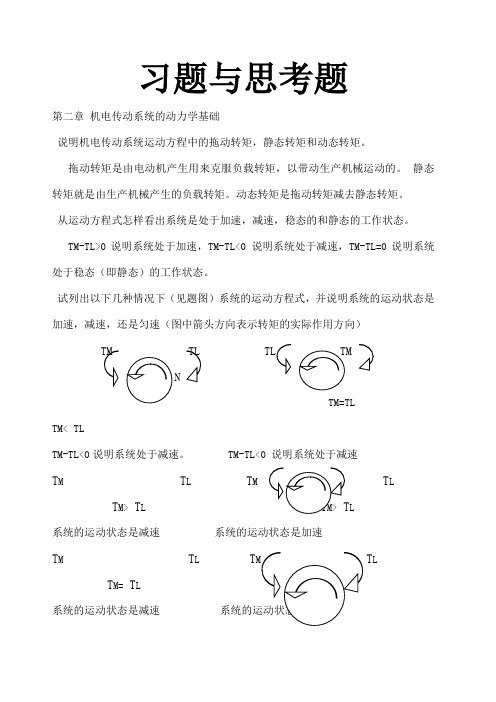
习题与思考题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速(图中箭头方向表示转矩的实际作用方向)TM< TLTM-TL<0说明系统处于减速。
TM-TL<0 说明系统处于减速T M T L T M T LT M> T L系统的运动状态是减速系统的运动状态是加速T M T L T T L T M= T系统的运动状态是减速多轴拖动系统为什么要折算成单轴拖动系统转矩折算为什么依据折算前后功率不变的原则转动惯量折算为什么依据折算前后动能不变的原则因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=ω2为什么低速轴转矩大,高速轴转矩小因为P= Tω,P不变ω越小T越大,ω越大T 越小。
为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多因为P=Tω,T=GD2/375. P=ωGD2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
如图(a)所示,电动机轴上的转动惯量J M=, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60r/min。
机电传动控制课后习题答案《第五版》
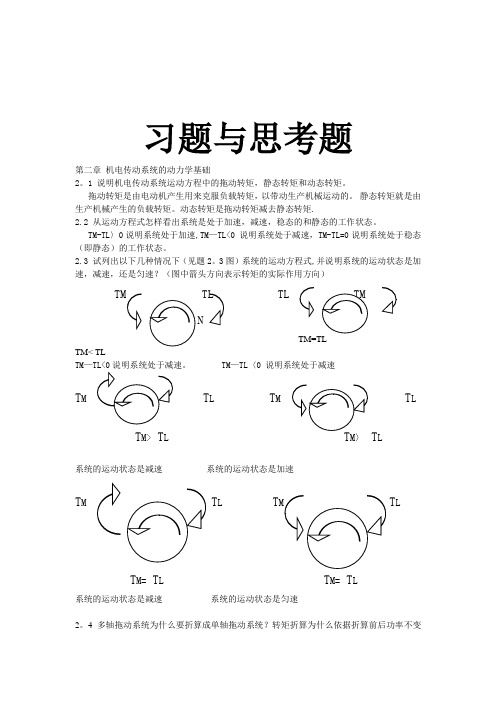
习题与思考题第二章机电传动系统的动力学基础2。
1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩.2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL〉0说明系统处于加速,TM—TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2。
3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM=TLTM< TLTM—TL<0说明系统处于减速。
TM—TL〈0 说明系统处于减速T M T L T M T LT M> T L M〉L系统的运动状态是减速系统的运动状态是加速T M T L T T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速2。
4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速.这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置.所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω,p不变.转动惯量折算前后动能不变原则是能量守恒MV=0。
5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小.2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
机电传动 第二章 课后答案

习题与思考题第二章机电传动系统的动力学基础2.1 试表述机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态?TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出如题2.3图所示几种情况下系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)T M TTM-TL>0T M T L T M T LT M> T系统的运动状态是减速T M T L T T L T M= T系统的运动状态是减速2.4因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么机电传动系统中低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min;中间传动轴的转动惯量J1=2kg.m2,转速n l=300r/min;生产机械轴的转动惯量J L=16kgm2,转速n L=60 r/min。
机电传动控制2、机电传动的动力学基础
详细描述
机电传动系统是将电能转换为机械能以驱动机械设备 运转的系统。它主要由电机、传动机构和控制装置三 部分组成。电机是将电能转换为机械能的核心部件, 通过电机的旋转运动实现机械能的输出;传动机构则 是将电机的输出与机械设备连接,实现减速、变速或 传递扭矩等功能;控制装置则是控制电机的启动、停 止、调速等操作,以实现对机械设备的精确控制。
该系统通常采用交流伺服电机驱动, 通过高精度编码器和反馈控制系统实 现精确的位置和速度控制。
此外,该系统还具有强大的故障诊断 和安全保护功能,以保障设备和操作 人员的安全。
工业机器人机电传动控制系统
工业机器人是自动化生产线上 不可或缺的重要设备,其机电 传动控制系统是实现高精度、
高效率、高可靠性的关键。
该系统通常采用直流伺服电机 驱动,通过高精度编码器和反 馈控制系统实现精确的位置和
速度控制。
工业机器人的机电传动控制系 统还具有高刚度、低惯量、低 摩擦等特性,以确保稳定、准 确的运动轨迹。
此外,该系统还具有强大的故 障诊断和安全保护功能,以保 障设备和生产线的稳定运行。
风力发电机的机电传动控制系统
机电传动控制2
contents
目录
• 机电传动系统概述 • 机电传动的动力学基础 • 机电传动系统的控制原理 • 机电传动系统的设计方法 • 机电传动控制系统的实现 • 机电传动控制系统的应用实例
01 机电传动系统概述
机电传动系统的定义与组成
总结词
机电传动系统是由电机、传动机构和控制装置组成的 ,用于实现机械能与电能之间转换的系统。
机电传动系统的分类
• 总结词:根据应用领域和功能特点,机电传动系统可分为直流电机传动、交流 电机传动、步进电机传动和伺服电机传动等类型。
二—机电传动分析的基础知识
的基础。
重点:转矩、机电传动系统的运动方程式、折算、输出功率的 计算
转矩
电动机带动物体旋转的能力用转矩表示。(力的单位)与杠杆的
长度(长度的单位)的乘积,就是转矩 。
机电传动系统的运动方程式
d TM TL J dt
TM 一电动机产生的转矩; TL ―单轴传动系统的负载转矩;
J 一单轴传动系统的转动惯量;
2. 由转矩和角速度确定输出功率
T PL W L
3. 输送流体的功率
Mgh P W t
2.4 生产机械的机械特性 1、恒转矩型机械特性
提升机构、皮带运输机以及金属切削机床等。 依据负载转矩与运动方向的关系,可以分为反抗转矩和位能转矩。 反抗转矩:也称摩擦转矩,是因摩擦、非弹性体的压缩、拉伸与扭
控制系统的分类方式很多,但机械设备的控制系统常 按系统的组成原理,分为开环控制系统、半闭环控制系统 和闭环控制系统。
输入量
控制器
控制量
控制对象 输出量
开环控制系统框图
输入量
控制器
控制量
控制对象 输出量
闭环控制系统Leabharlann 图反馈环节输入量控制器
控制量
控制对象 输出量
传动及工作台
反馈环节
数控机床半闭环控制系统框图 系统易调整、稳定性好、整体造 价低
2.3 机电传动系统的动力学基础
机电传动系统是一个由电动机拖动、并通过传动机构带动生产
机械运转的机电运动的动力学整体。尽管电动机种类繁多、特
性各异,生产机械的负载性质也可以各种各样,但从动力学的 角度来分析时,则都应服从动力学的统一规律 。是分析机电传 动系统的运动方程式,进而分析机电传动系统稳定运行的条件