闭合导线数据处理
全站仪闭合导线测量方法与步骤

全站仪闭合导线测量是工程测量中常用的一种测量方法,它可以用于测量大地水准线或者测量封闭曲线的导线,是一种精度较高的测量方法。
下面将从测量方法和测量步骤两个方面对全站仪闭合导线测量进行详细介绍。
一、测量方法1.选择合适的全站仪首先要选择一台精度高、性能稳定的全站仪,确保全站仪的仪器误差和观测误差在允许范围内。
2.设置测量基准点在测量区域选择合适的基准点,确保基准点的稳定性和可靠性,为后续的闭合导线测量奠定基础。
3.设置测量工作模式根据实际情况,设置全站仪的测量工作模式,包括水平测量和垂直测量两种模式,确保测量的准确性和完整性。
4.安装、调试全站仪根据实际情况,选择合适的支架和三脚架,安装全站仪,并对全站仪进行校准和调试,确保仪器的稳定性和准确性。
根据测量要求,进行闭合导线测量,确保测量的精度和完整性。
根据实际情况,可以选择单站测量或者双站测量,确保测量结果的准确性和可靠性。
二、测量步骤1.准备工作在开始测量之前,要做好相关的准备工作,包括选择合适的测量时间和天气条件,清理基准点和测量点,确保测量的准确性和可靠性。
2.设置基准点在测量区域选择合适的基准点,根据实际情况,选择固定基准点和移动基准点,确保测量的准确性和可靠性。
3.安装全站仪根据实际情况,选择合适的支架和三脚架,安装全站仪,并对全站仪进行校准和调试,确保仪器的稳定性和准确性。
4.选择测量模式根据测量要求,选择合适的测量模式,包括水平测量和垂直测量两种模式,确保测量的准确性和完整性。
根据测量要求,开始闭合导线测量,根据实际情况,选择单站测量或者双站测量,确保测量结果的准确性和可靠性。
全站仪闭合导线测量是工程测量中常用的一种测量方法,它可以用于测量大地水准线或者测量封闭曲线的导线,是一种精度较高的测量方法。
通过选择合适的全站仪、设置测量基准点、设置测量工作模式、安装、调试全站仪和开始测量等步骤,可以确保闭合导线测量的精度和可靠性。
在实际工程中,需要根据具体情况灵活运用以上方法和步骤,确保测量结果的准确性和可靠性,促进工程测量工作的顺利进行。
全站仪测量闭合导线如何平差计算出各点坐标

如果你想学习导线(闭合、符合、支导线),我可以传份学习资料给你,如果要严密平差建议用清华山维测量平差软件如果简单平差可以先推算方位角闭合差,然后将闭合差平均分配到每站测的角度上进行角度平差。
然后用平差后的角度推算坐标闭合差,得到的x和y的闭合差平均分配到每一站的坐标上即可,求得导线绝对闭合差,在除以导线全长得到导线全长相对闭合差导线平差主要是看方向中误差和导线全长闭合差及导线全长相对闭合差工程测量闭合导线差怎么计算的???闭合导线平差手算简单来讲分两步:1.先计算出导线闭合环内角和,它与理论值(n-2)x180相减产生的闭合差平均分配到各个转角。
使修正后的内角和等于理论值。
2.根据已知坐标方位角(已知两点坐标可求得坐标方位角)与修正后的各个转角值求出导线边坐标方位角。
再通过方位角、导线边的长度计算出各个导线边产生的坐标增量。
算到起算点后,X、Y 增量和的理论值均应为0。
但因观测误差,坐标增量和往往不等于0。
将偏差值平均分配到各个点位上,以消除偏差。
最后,用起算坐标依次加上修正后的坐标增量,就可以得到平差后各点的坐标值了。
从一个已知点出发,在连续测量多个点位后再到原出发点,这就叫导线的闭合,因为误差的存在,在闭合时有可能产生误差,这时你需要将误差以每根导线长度为权重进行平差。
看到百笑狂生的回答了,忍不住想说几句,这个什么“原位往复闭合”、“开路测量闭合”等等,你是从哪儿学来的概念?反正在测量这个专业里是没有这个概念的,楼主所说的导线测量,是建立平面控制网的一种最常见的测量方法,下面我简单介绍一下:一、导线进行测量共有三种方法:1、从一个已知点出发,依次对各个目标点进行测量,这种测量方式,因为累积误差的原因,在精度要求较高的场合一般不采用,也谈不上什么闭合不闭合的问题;2、从一个已知点出发,依次对各个目标点进行测量后,再回到这个已知点,也就是说,将已知点做为测量的最后一个点也进行测量。
如果没有误差出现,那么最后一个点的测量结果应与已知点相同,这就叫导线的闭合。
闭合导线数据处理流程(一)

闭合导线数据处理流程(一)闭合导线数据处理介绍闭合导线数据处理是在测量领域中常用的一项技术,用于处理测量闭合导线的数据。
闭合导线是指起点和终点相接的导线闭合成环形的测量线路。
在进行闭合导线测量后,需要对测量数据进行处理和分析,以获取准确的测量结果。
数据处理流程1. 数据导入将闭合导线测量数据导入数据处理软件中,常见的数据格式包括文本文件和电子表格文件。
数据导入是数据处理的第一步,确保数据准确可靠。
2. 数据校正校正是闭合导线数据处理的重要步骤之一。
校正旨在消除测量误差和偏差,使测量结果更加准确。
常用的校正方法包括观测值平均法、最小二乘法等。
3. 数据处理在闭合导线测量中,常常需要进行数据处理,得到目标测量值。
数据处理方法包括距离处理、角度处理和坐标计算等。
根据具体的测量任务,选择合适的方法进行数据处理。
距离处理距离处理是闭合导线测量中的基本步骤,用于计算闭合导线的长度。
常见的距离处理方法包括正算法、反算法和坐标差法等。
角度处理角度处理是闭合导线测量中的关键步骤,用于计算闭合导线的方位角或内角。
常见的角度处理方法包括正算法、反算法和角度差法等。
坐标计算坐标计算是闭合导线测量的最终结果,用于确定测量点的坐标。
根据测量任务的需求,选择相应的坐标计算方法,计算得到闭合导线上各测点的坐标。
4. 数据分析数据分析是闭合导线数据处理的重要环节,通过对测量数据的统计分析,得出有关闭合导线测量的结论和建议。
常见的数据分析方法包括误差分析、可靠性分析和精度评定等。
5. 结果输出最后,将处理完成的闭合导线测量结果进行输出和报告。
结果输出可以包括测量值、校正值、处理结果等。
报告应包含详细的数据处理过程和分析结果,以便后续的参考和复查。
总结闭合导线数据处理是测量工作中必不可少的环节,通过合理的数据处理流程和方法,能够确保测量结果的准确性和可靠性。
在实际应用中,根据具体的测量任务和需求,灵活选择适合的数据处理方法,提高工作效率和质量。
导线测量 ——闭合导线计算实例及误差减小方法

Geomatics Science and Technology 测绘科学技术, 2019, 7(2), 45-51Published Online April 2019 in Hans. /journal/gsthttps:///10.12677/gst.2019.72008Polygonal Chain—Calculation Examples of Closed Conductors and Error ReductionMethodsLei HuChina Railway Twenty-Four Bureau Nanchang Company, Nanchang JiangxiReceived: Feb. 24th, 2019; accepted: Mar. 10th, 2019; published: Mar. 18th, 2019AbstractConductor layout has strong mobility and flexibility, suitable for small area plane control survey.Adjacent two control points are connected with a straight line, the overall form of broken line, known as the conductor; among them, the control point is called traverse point. Traverse mea-surement is to determine the side length of each traverse and the angle of each turning angle.From the starting data, the coordinate azimuth of each edge is calculated in turn, so as to obtain the coordinates of the unknown points of each traverse.KeywordsAzimuth, Closure, Total Station, Turning Angle导线测量——闭合导线计算实例及误差减小方法胡磊中铁二十四局南昌铁路工程有限公司,江西南昌收稿日期:2019年2月24日;录用日期:2019年3月10日;发布日期:2019年3月18日摘要导线布设具有较强的机动性和灵活性,适用于小地区平面控制测量。
导线测量—闭合导线测量的内业计算(水利水电工程测量课件)

2
3
841018
1082718
1212702
1354911
4
x
1为已知导线点
1 x1 500.00 m
直线12的方位角
y1 500.00 m
900701
5
如何进行闭合路线闭合差调整呢?
一、图根闭合导线的坐标计算
一、图根闭合导线的坐标计算
1.角度闭合差的计算与调整
23 = 12 + 180° + 2′ = 335°24′ 00″ + 180° + 108°27′ 08″
= 623°51′ 03″ −360° = 263°51′ 08″
计算检核:
最后推算出起始边坐标方位角,
它应与原有的起始边已知坐标方
位角相等,否则应重新检查计算。
12(推算) = 51 + 180° + 1′
一、图根闭合导线的坐标计算
计算检核:
推算起始点1的坐标,其值应与原有的已知值相等
1(推算) = 5 + 51
= 307.99 m + 192.01m
= 500.00m
= 1(已知)Biblioteka 一、图根闭合导线的坐标计算
一、图根闭合导线的坐标计算
导线测量的内业计算思路:
1
由水平角观测值β,计算方位角α
= −
一、图根闭合导线的坐标计算
在本例中:
+50″ = −10″
=−
= −
5
计算检核:
= −10″ − 10″ − 10″ − 10″ − 10″
= −50″
= −
一、图根闭合导线的坐标计算
闭合导线Excel计算流程

应用Excel 对控制测量闭合导线进行内业计算应用Excel 进行控制测量闭合导线的内业计算这过程实际上就是输入数据和输入公式的过程。
以下就是对输入过程的详细操作:(1)合并A1.A2.A3单元格并输入“点号”,合并B1.B2.B3单元格输入“观测角(右角)”, 合并C1.C2.C3单元格输入“改正后的角值”,合并D1.D2.D3单元格并输入“坐标方位角”,合并E1.E2.E3单元格输入“边长(m)”,合并F1.F2.G1.G2.H1.H2.I1.I2单元格并输入“增量计算值”,合并F3.G3单元格输入“△x ”,合并H3.I3单元格输入“△y ”,合并J1.J2.K1.K2.L1.L2.M1.M2单元格输入“改正后的增量值”,合并J3.K3单元格输入“△x ”,合并L3.M3单元格输入“△y ”,合并N1.N2.O1.O1单元格输入“坐标”,在N3输入“x ”,在O3输入“y ”,合并P1.P2.P3输入“点号”。
(2).在第四行的十二个单元个输入“1~~12”,合并A5.A6输入A,合并B5.B6输入“-15"~87°30′00"”合并A7.A8输入D ,合并B7.B8输入“-15"~107°20′00"”,合并A9.A10输入C ,合并B9.B10输入“-15"~75°56′00",合并A11.A12输入B ,合并B11.B12输入-15"~89°15′00",前面的单元格里输入的“-15"”由在计算此闭合导线ABCDA 的各个观测角和的误差为“+1′”,故把此误差平均的各个内角中去。
合并C5.C6输入“87°29′45"”,合并C7.C8输入“107°19′45"”,合并C9.C10输入“75°55′45"”合并C11.C12输入“89°14′45"”至此前面输入的四个角度均为改正后的观测角值即(如87°30′00"+-15"=87°29′45").合并D5.D6.D7输入“41°16′45"”此值由DA 边的方向角为133°47′00"+87°29′45"-180°求得。
闭合导线平差计算步骤资料讲解
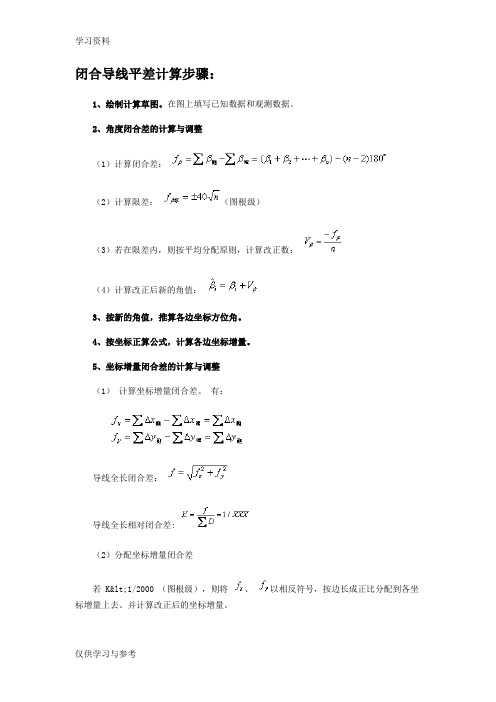
闭合导线平差计算步骤:1、绘制计算草图。
在图上填写已知数据和观测数据。
2、角度闭合差的计算与调整(1)计算闭合差:(2)计算限差:(图根级)(3)若在限差内,则按平均分配原则,计算改正数:(4)计算改正后新的角值:3、按新的角值,推算各边坐标方位角。
4、按坐标正算公式,计算各边坐标增量。
5、坐标增量闭合差的计算与调整(1)计算坐标增量闭合差。
有:导线全长闭合差:导线全长相对闭合差:(2)分配坐标增量闭合差若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。
并计算改正后的坐标增量。
6、坐标计算根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。
[ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。
计算表格见下图:闭合水准路线内业计算的步骤:(1) 填写观测数据(2) 计算高差闭合差h f =∑h ,若h f ≤容h f时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。
(3) 调整高差闭合差 各段高差改正数:i hi i hi L L f V n nf V ·· ∑-=∑-=或各段改正高差:ii i V h h +=改(4) 计算待定点的高程闭合差(fh )水准路线中各点间高差的代数和应等于两已知水准点间的高差。
若不等两者之差称为闭合差高差闭合差的计算.支水准路线闭合差的计算方法.附合水准路线闭合差的计算方法.闭合水准路线闭合差的计算方法高差闭合差容许值 (n 为测站数,适合山地)(L 为测段长度,以公里为单位,适合平地)水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差改正数每公里改正数各测段的改正数每一站改正数各测段的改正数计算的基本步骤高差闭合差的计算闭合差的调整高程的计算(见例题2)例题2高程误差配赋表首先:将检查无误的野外观测成果填入计算表,包括:各测段的距离和高差值h i已知数据第一步:高差闭合差的计算第二步:高差闭合差的调整各测段实测高差加改正数,得改正后的高差h i第三步:待定点高程的计算根据改正后的高差h i,由起始点Ⅲ18开始,逐点推算出各点的高程,列入表中最后算得的Ⅲ19点的高程应与已知的高程HⅢ19相等,否则说明闭合水准路线闭合水准路线的成果计算与附合水准路线基本相同,不同之处是检核条件与附合水准路线不同。
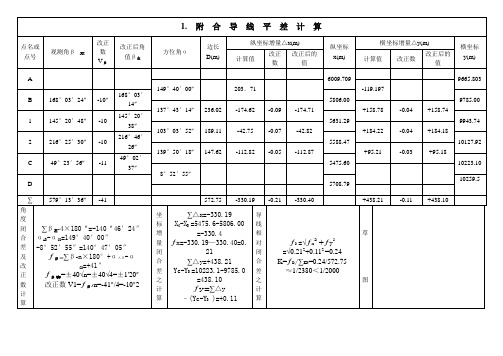
导线测量闭合差的调整
162.92
+57.14
-0.03
+57.11
+152.57
-0.04
+152.53
C
88°36′08″
+11
88°36′19″
5556.51
7314.25
338°04′19″
136.85
+126.95
-0.03
+126.92
-51.11
-0.04
-51.15
D
87°25′30″
+11
ƒβ容=±40√n=±40√4=±1'20″
改正数V1=ƒβ/n=-41″/4=-10″2
坐标增量闭合差之计算
∑△x=-330.19
XC-XB=5475.6-5806.00=-330.4
ƒx=-330.19—330.40=0.21
∑△y=+438.21
Yc-YB=10223.1-9785.0
=438.10
ƒy=∑△y–(Yc-YB)=+0.11
导线相对闭合差之计算
ƒD=√ƒx2+ƒy2
=√0.212+0.112=0.24
K=ƒD/∑D=0.24/572.75
≈1/2380<1/2000
草
图
1.闭合导线平差计算
点名或点号
观测角β左
改正数
Vβ
改正后角值β左
方位角α
边长D(m)
纵坐标增量△X(m)
纵坐标x(m)
-10″
168°03′14″
5806.00
9785.00
137°43′14″
236.02
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
106.295 106.300
106.298
106.2059
4.4194
272.4232 267.1421
87.1727 49.562 92.4532 49.557
49.507 49.500
49.503
47.6362 -13.4666
271.4558 268.1135
88.1360 59.917 91.4812 59.913
59.889 59.883
59.886
59.4629 -7.1054
270.4350 269.1422
89.1602 87.398 90.4546 87.392
87.391 87.384
87.388
-6.9265 -87.1126
270.1223 269.4914
89.4740 75.028 90.1043 75.035
57.236 57.227
57.232
-55.8877 -12.3294
268.0044 271.5508
91.5909 36.681 88.0449 36.683
36.659 36.662
36.661
-36.3129
5.0381
268.2407 271.3208
91.3550 42.081 88.2743 42.076
73.1808
X增量
Y增量
X增量改正值 Y增量改正值 改正后X增量 改正后Y增量 X坐标
Y坐标
0.0101 0.0146 0.0068 0.0082 0.0120 0.0103 0.0075 0.0075 0.0074 0.0079 0.0050 0.0058 0.0089 0.0162 0.1284
2.2055 3.6070 2.3640 1.8664 1.1405 0.2514 -3.5432 -1.7703 -1.4431 -2.3775 -1.2500 -1.1511 -0.7621 -0.4943
0.0003
90.1817
89.2825 90.1505
90.1743
9.3119
89.4617
2879.5929
0.0031
方位角闭合差 -0.0031
右折角 盘右右折角
359.1130
右折角 359.1137
测量点方位示意图
推算方位角 89.2920
方位角改正值
改正后方位角
90.1743
天顶距
盘左 89.2146 89.5241
1.403 245.2735 65.2845
1.288 0.0002 179.5956
1.496 166.3138 346.3136
1.398 0.0006 179.5946
1.355 187.0101 7.0040
1.478 0.0000 179.5923
1.400 200.3353 20.3321
3555200.000 397000.000 397050.000 397100.000
闭
合
导
线
测
右折角 盘右右折角
右折角
推算方位角 90.1743
方位角改正值
改正后方位角
天顶距 盘左
260.4629 260.4624
9.3119
0.0002
9.3121
89.4617 88.3407
186.5252 186.5253
0.0002
172.1012
87.3207 91.5901
261.0036 261.0032 91.0938
0.0002
91.0940
88.0445 91.3546
175.1921 175.1924 95.5014
0.0002
95.5016
88.2733 90.4919
185.3205 185.3200 90.1814
2.3826
0.0002
2.3828
91.3117 88.0040
198.1643 198.1643 344.2143
0.0002
344.2145
91.5401 87.1725
171.0243 171.0247 353.1856
0.0003
353.1859
92.4525 88.1357
267.3321 267.3321 265.4536
测站 测站高/m
A3954 1.211
G01
1.273
G02
1.332
XN01
1.788
XN04
1.683
G05
1.273
G06
1.285
G07
1.873
G08
1.368
G09
1.466
XN22
1.339
XN21
1.373
XN20
1.437
G12 A3954 值求和
1.632 1.211 20.333
f 0.1739
-0.0092 -0.0134 -0.0062 -0.0075 -0.0110 -0.0094 -0.0069 -0.0069 -0.0068 -0.0072 -0.0046 -0.0053 -0.0081 -0.0148 -0.1173
1/k 5364
72.1682 106.2205 47.6430 59.4712 -6.9145 -56.4001 -17.4411 -54.3035 -50.9189 -55.8799 -36.3078 -0.7973 -6.1825 -0.3573
75.028 75.035
75.031
-56.4104 -49.4725
268.2052 271.4428
91.3903 54.970 84.1519 54.974
54.947 54.698
54.823
-17.4487 -51.9717
267.4759 271.3034
92.1201 54.668 88.2917 54.645
精度验证
目标
G12 G01 A3954 G02 G01 XN01 G02 XN04 XN01 G05 XN04 G06 G05 G07 G06 G08 G07 G09 G08 XN22 G09 XN21 XN22 XN20 XN21 G12 XN20 A3954 G12
目标高/m
水平角观测数据
盘左
盘右
359.1241 179.1227
X
3555550.000
3555500.000
右折角 盘左右折角
359.1144
测量点方位示意
3555450.000
G07
3555400.000
3555400.000 3555350.000 3555300.000 3555250.000
G08 G09 XN22 XN21
X增量改正值 Y增量改正值 改正后X增量 改正后Y增量 X坐标
Y坐标
3555228.680 397287.243
控制点间高差/m 改正后高差/m 高程/m
0.4729 2.4676 -1.9434 3.6864 -3.5276 2.3427 -2.3853 1.8473 -1.8854 1.1177 -1.1632 0.2692 -0.2337 -1.5836 5.5028 -2.0987 1.4418 -1.9354 0.9507 -2.2911 2.4640 -1.2710 1.2289 -1.1728 1.1295 -0.9300 0.5942 -0.5157 0.4729
1.363 0.0010 179.5923
1.465 261.0037 80.5959
1.392 0.0001 179.5926
1.560 175.1928 355.1847
1.265 0.0109 180.0112
1.245 185.3304 5.3317
1.650
右折角 盘左右折角
260.4619 186.5253 198.1643 171.0251 267.3320 224.2028 149.4058 245.2735 166.3136 187.0055 200.3353 261.0027 175.1927 185.3155
G05
G06 G07
XN04 XN01 G02
G02 G08
G01
XN20
G12
A3954
Y 397100.000 397150.000 397200.000 397250.000 397300.000 397350.000
合
导
线
测
量 ( 南京师范大学 - 钟秀明 )
天顶距 盘右
天顶距
斜距/m
平距/m
11.8228 4.4061 -13.4729 -7.1129 -87.1236 -49.4820 -51.9786 -5.8725 -17.9909 -12.3366 5.0335 42.0498 64.2727 117.7851
3555228.680 397287.243 3555300.848 397299.066 3555407.069 397303.472 3555454.712 397289.999 3555514.183 397282.886 3555507.268 397195.762 3555450.868 397146.281 3555433.427 397094.302 3555379.124 397088.430 3555328.205 397070.439 3555272.325 397058.102 3555236.017 397063.135 3555235.220 397105.185 3555229.037 397169.458 3555228.680 397287.243