任意空间四连杆机构运动精度及其可靠性分析_顾井峰
常用机构(四连杆机构)[优质课类]
![常用机构(四连杆机构)[优质课类]](https://img.taocdn.com/s3/m/37c6715eaa00b52acfc7caa6.png)
B
a
j
连 杆
分析
A
机
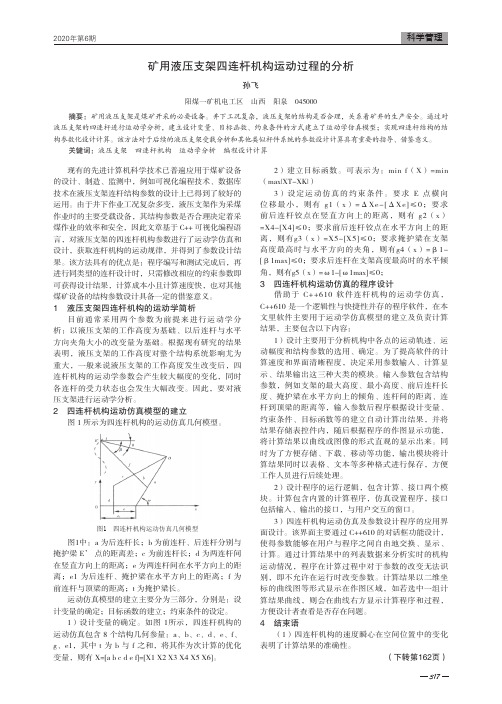
构 j =0 cos j =1 cos d d min
j =180° cos j = –1 cos d d max
C
d c
d
D
d min 或 d max 可能最小
曲柄摇杆机构,当曲柄主动时,在曲柄与机架共线的两个位置
之一,传动角最小.
课堂内容
23
死点
机 • 死点:
• 曲柄滑块机构 (扩大回转副)
平 为偏心轮。
面
连 杆 机
提高偏心轴的强度和 刚度、简化结构
构
• 偏心轮机构
课堂内容
17
机
械
设
计 基 础
还如: 脚踏砂轮机构
颚式破碎机。
平
面
连
杆
机
构
偏心轮用在:
曲柄销承受较大冲击载荷、曲柄长度
较短及需要装在直轴中部的机器之中
的机构中.
课堂内容
18
三、平面四杆机构的传动特性
设
计
基
础
平 面 连 杆 机 构
传动不利,设计时规定 4050
通常,机构在运动过程中传动角是变化的,最小值在哪?
课堂内容
22
最小传动角 min
机 械
2
BD
a2
d2
2a d
cosj
设 计
2
BD
b2
c2
2b c cosd
基 础
b
平 面
cosd
b2 c 2 2 a d cosj a 2 d 2
课堂内容
8
机 特殊机构
械
设
矿用液压支架四连杆机构运动过程的分析
317现有的先进计算机科学技术已普遍应用于煤矿设备的设计、制造、监测中,例如可视化编程技术、数据库技术在液压支架连杆结构参数的设计上已得到了较好的运用。
由于井下作业工况复杂多变,液压支架作为采煤作业时的主要受载设备,其结构参数是否合理决定着采煤作业的效率和安全,因此文章基于 C++ 可视化编程语言,对液压支架的四连杆机构参数进行了运动学仿真和设计,获取连杆机构的运动规律,并得到了参数设计结果。
该方法具有的优点是:程序编写和测试完成后,再进行同类型的连杆设计时,只需修改相应的约束参数即可获得设计结果,计算成本小且计算速度快,也对其他煤矿设备的结构参数设计具备一定的借鉴意义。
1 液压支架四连杆机构的运动学简析目前通常采用两个参数为前提来进行运动学分析:以液压支架的工作高度为基础、以后连杆与水平方向夹角大小的改变量为基础。
根据现有研究的结果表明,液压支架的工作高度对整个结构系统影响尤为重大,一般来说液压支架的工作高度发生改变后,四连杆机构的运动学参数会产生较大幅度的变化,同时各连杆的受力状态也会发生大幅改变。
因此,要对液压支架进行运动学分析。
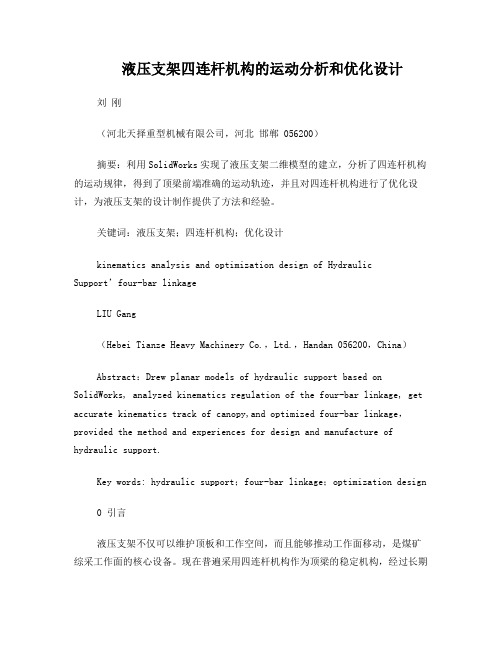
2 四连杆机构运动仿真模型的建立图 1 所示为四连杆机构的运动仿真几何模型。
图1 四连杆机构运动仿真几何模型图1中:a 为后连杆长;b 为前连杆、后连杆分别与掩护梁 E’ 点的距离差;c 为前连杆长;d 为两连杆间在竖直方向上的距离;e 为两连杆间在水平方向上的距离;e1 为后连杆、掩护梁在水平方向上的距离;f 为前连杆与顶梁的距离;t 为掩护梁长。
运动仿真模型的建立主要分为三部分,分别是:设计变量的确定;目标函数的建立;约束条件的设定。
1)设计变量的确定。
如图 1所示,四连杆机构的运动仿真包含 8 个结构几何参量:a、b、c、d、e、f、g、e1,其中 t 为 b 与 f 之和,将其作为次计算的优化变量,则有 X=[a b c d e f]=[X1 X2 X3 X4 X5 X6]。
四连杆机构原理
四连杆机构原理
四连杆机构是一种常见的机械结构,由四个连杆组成,其中两个为主动连杆,两个为从动连杆。
四连杆机构的原理和应用十分广泛,下面将对其原理进行详细介绍。
首先,四连杆机构的结构特点是由四个连杆组成的闭合链条,其中两个连杆被固定,另外两个连杆能够相对运动。
这种结构使得四连杆机构具有较为灵活的运动特性,可以用于各种机械装置中。
其次,四连杆机构的运动原理是通过主动连杆的运动来驱动从动连杆的运动。
主动连杆通过外部力或驱动装置进行运动,从而带动从动连杆做相应的运动。
这种结构使得四连杆机构能够实现复杂的运动轨迹和运动规律,可以用于各种需要复杂运动的机械装置中。
四连杆机构的运动规律可以通过运动分析和动力学分析来进行研究。
通过对各个连杆的长度、角度和速度等参数进行分析,可以得到四连杆机构的运动规律和特性。
这对于设计和优化四连杆机构具有重要意义,可以使得机构的运动更加稳定和高效。
在实际应用中,四连杆机构被广泛应用于各种机械装置中,如发动机、机械手臂、输送装置等。
其灵活的运动特性和复杂的运动规律使得四连杆机构能够满足各种复杂的工程需求,成为机械设计中常用的重要元件之一。
总之,四连杆机构是一种常见的机械结构,具有灵活的运动特性和复杂的运动规律。
通过对其结构和运动原理的深入研究,可以更好地应用于各种机械装置中,为工程设计和制造提供重要的支持和帮助。
四连杆机构运动分析

四连杆机构运动分析
1、组装零件:
---放置第一个零件常采用缺省;
---连接零件可采用销钉连接方式(机构能运动);
2、进入机构运动环境
---应用程序|机构---
---编辑|重新连接--- /检查装配情况
---运行(连接组件)---是(确认)---
3、观察机构中的体
---视图|加亮主体--- /绿色表示为地体
4、拖动模型
---单击‘拖动’按钮---
---任选四连杆上一点,拖动鼠标进行拖动---
---单击中建,结束拖动---
5、建立伺服电机
---选择‘伺服电动机’按钮---
---定义电机名称,运动轴--- /若装配正确,运动处都会出现
运动轴
---定义电机速度、加速度--- /可单击图像查看
6、仿真运动过程
---单击‘机构分析’按钮---
---选择‘运动学’分析类型,单击‘运行’观察运动情况---
7、回放并保存结果
单击‘回放’按钮可以进行回放;
8、产生分析测量结果
---分析|测量,打开‘测量结果’---
---单击‘新建’按钮(在测量栏中),打开‘测量定义’--- ---选择测量点,测量分量,坐标系---确定---
/测量点可以是零件端点,基准点,几何点
---单击画图,可以绘制结果图形---
9、产生轨迹曲线
---插入|轨迹曲线---
---选择点---确定---
/零件顶点,几何点可以产生轨迹,基准点不能产生轨迹,可以在模型树种中右键零件‘打开’|草绘,绘制几何点;。
[机械制造资料]四杆机构分析
![[机械制造资料]四杆机构分析](https://img.taocdn.com/s3/m/5ad0bbe1524de518964b7d0b.png)
基于matlab和ADMAS的四杆机构运动仿真摘要:铰链四杆机构是机械设备中最基本的机构类型之一,文中以它为研究对象建立数学模型,应用MATLAB编程与ADMAS建模分别对四杆机构进行仿真分析,获得各点的运动曲线,进行对比,两种方法各有所长,分析结果显示直观。
1 引言平面四杆机构是连杆机构中最常见的机构组成,由于其结构简单,可承受载荷大,连杆曲线具有多样性等优点,它在工程中得到广泛的运用,设计四杆机构的方法有很多,比如解析法、作图法、实验法,但这些方法都存在一定的缺点,图解法精度差,解析法的计算工作量大,不直观使其在工程运用中受到约束,如果设计平面四杆机构时能显示其运动轨迹从而将图示结果与设计要求进行对比,可以使设计显得更加直观,提高工作效率。
本文以MATLAB、ADMAS为平台,开发了一个平面四杆机构运动轨迹仿真系统,模拟四杆机构的运动仿真,并获得各点的运动轨迹坐标,使设计显得直观,更好的帮助了工程技术人员在机构分析与设计过程中进行优化,提高了工作效率,降低产品开发成本2 建立机构运动的数学模型设原动件OA以n转/min的速度匀速转动,求各杆的运动轨迹。
将平面四杆机构看成1个封闭的四边形,连接OB、AC相交于E点,令t2=∠AOC、t4=∠BCD、t3=∠BAF、a=∠ACO、b=∠ACB、e=AC,AD、DC、CO的杆长分别为r1、r2、r3、r4,如图1所示。
图1 四杆机构数学建模由原动件OA以n转/min的速度匀速转动可得OA的角速度为:①w=2**n/60则∠AOC在任意时刻的角度为:22t = t deg*/180π ②其中2t deg 为任意时刻的∠AOC 的弧度,是已知常量。
在三角形AOC 中根据余弦定理得e = ③在三角形ADC 中根据余弦定理得cos()g = ④在三角形AOC 中根据正弦定理得2sin()sin()*2/a t r e = ⑤在三角形ADC 中根据正弦定理得sin()sin()*3/b g r e = ⑥联立①-⑥式即可解得a 、b 、g 、t2则4t = 180*d2r - a - b34t = t -g由此可得任意时刻a 点的运动轨迹坐标为(ax ,ay ),其中:x 22a =r *cos(t ) y 22a =r *sin(t )任意时刻b 点的运动轨迹坐标为(bx ,by ),其中:x 441b =r *cos(t )+r y 44b =r *sin(t )3.matlab 程序设计平面四杆机构运动轨迹仿真程序设计当数学模型完成后,紧接着我们在M 文件中来编写程序实现平面四杆机构的运动轨迹仿真(当然也可直接在notebook 里进行编写与仿真)。
液压支架四连杆机构运动分析和优化设计
液压支架四连杆机构的运动分析和优化设计刘刚(河北天择重型机械有限公司,河北邯郸 056200)摘要:利用SolidWorks实现了液压支架二维模型的建立,分析了四连杆机构的运动规律,得到了顶梁前端准确的运动轨迹,并且对四连杆机构进行了优化设计,为液压支架的设计制作提供了方法和经验。
关键词:液压支架;四连杆机构;优化设计kinematics analysis and optimization design of HydraulicSupport’four-bar linkageLIU Gang(Hebei Tianze Heavy Machinery Co.,Ltd.,Handan 056200,China)Abstract:Drew planar models of hydraulic support based on SolidWorks, analyzed kinematics regulation of the four-bar linkage, get accurate kinematics track of canopy,and optimized four-bar linkage,provided the method and experiences for design and manufacture of hydraulic support.Key words: hydraulic support;four-bar linkage;optimization design0 引言液压支架不仅可以维护顶板和工作空间,而且能够推动工作面移动,是煤矿综采工作面的核心设备。
现在普遍采用四连杆机构作为顶梁的稳定机构,经过长期的实践使用,取得了巨大的经济效益,彻底解决了支撑式液压支架稳定性差的问题。
四连杆机构是液压支架最重要的连接部件,它控制顶梁沿近似双纽线的轨迹运动,大大缩小梁端距的变化量,提高了顶板管理性能。
契贝谢夫四连杆机构的优化设计与应用

契贝谢夫四连杆机构的优化设计与应用肖晓萍;李自胜【摘要】优化了契贝谢夫平面四杆机构.首先,利用解析法,建立了契贝谢夫平面四杆机构的数学模型,通过对机构理想的运动曲线的分析,确定了约束方程和目标函数.其次,使用Adams软件中参数化设计与分析方法优化了杆件的长度,得到了较好的运动轨迹.最后,将此机构应用到一自由度轮腿式行走机器人的设计,其仿真实验表明,此机器人在行走的过程具有较好的稳定性.该机构能够为研究低功耗、低成本、易控制的腿式行走机器人提供设计依据,方法实用可行.%Chebyshev four-bar linkage has been optimizedFirstly,based on analytical method,a mathematical model of Chebyshev four-bar linkage has been established and through analyzing the ideal mo-tion curve of themechanism,constraint functions and objective function have been determinedSecondly, better motion trajectory is obtained by applying the parametric design and analyzing method in A dmas soft-ware to optimize the length of the linkages. Finally, this mechanism is utilized to design one-degree wheel-leg walking robot.The simulation results show that the robot designed with the approach proposed in it obtains better stability and accuracy in the course of walking,which provides reference for studying and designing leg robot with low-power,low-cost and easy-control.The method is proven to be feasible and practical.【期刊名称】《机械设计与制造》【年(卷),期】2011(000)009【总页数】3页(P63-65)【关键词】契贝谢夫四杆机构;优化设计;腿式机器人;Adams【作者】肖晓萍;李自胜【作者单位】西南科技大学工程技术中心,绵阳621010;西南科技大学制造科学与工程学院,绵阳621010【正文语种】中文【中图分类】TH122;TH112.11 引言Chebyshev(契贝谢夫)机构是一类特殊的四杆机构。
平面连杆机构运动精度可靠性及灵敏度分析
轴开始,沿逆时针方向 计 量 为 正;xj 和yj(j=A, B,… ,F)分 别 为 各 铰 链 处 间 隙 矢 量 的 水 平 及 垂 直
分量;Xj 和Yj(j=A,D,F)分别为机构中 A、D、F
3个装 配 基 准 点 的 水 平 及 垂 直 位 置 坐 标;三 副 构
件舱门及摇臂在铰链 A、C处的夹角分别用毴A、毴C
失效的概率 Pf 可以表示为
Pf = P{g(X)<毮}
(4)
由式(1)~ 式(4)可以看出,只要能得到各连
杆的实际长度及铰 链 的 间 隙 参 数,就 可 通 过 求 解
机构的运动方程(式(1))得该 机 构 中 各 杆 件 的 方
位 角 ;通 过 式 (2)和 式 (3)得 到 锁 环 的 位 置 坐 标 和
1暋 连 杆 机 构 精 度 问 题 描 述
本文以飞机舱门收放机构为例来说明机构运 动精度可靠性研究的背景及方法。如图1所示,
· 2415 ·
Copyright©博看网 . All Rights Reserved.
中 国 机 械 工 程 第 25 卷 第 18 期 2014 年 9 月 下 半 月
为保证上 锁 时 允 许 的 最 大 位 置 偏 差。 因 此,机 构
· 2416 ·
2.1暋 实际杆长计算 构件的实际长度主要受制造加工误差和受载
后变形量的影响。 2.1.1暋 制造加工误差
由于制 造 技 术 的 限 制 和 人 工 因 素 存 在,杆 件 在制造加工过程中 必 然 存 在 误 差,符 合 制 造 精 度 要求的杆件尺寸分 布 在 一 定 的 范 围 之 内,由 相 关 标准可以查到各杆 长 的 极 限 偏 差,进 而 得 到 长 度 的上下限 Lmax、Lmin。 通 常 总 是 假 设 构 件 尺 寸 的 加工误差服从正态 分 布,这 已 为 工 程 实 际 所 证 实 且为中心极限定理所证明。所以有
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
标准差 0. 033 3 0. 1 0. 033 3 0. 05 0. 05 0. 1 0. 1 0. 1
2 2 2 2 2
输出角有两个值( 可能相等) , 与实际相符合。 此外, 空间连杆与主动杆或者从动杆的夹角亦可 分别通过解三角形求得, 限于篇幅, 这里不详细推导。 2 机构运动精度可靠性建模
任意空间四连杆机构的输出角度为从动杆的位 为了满足机构所规定的运动精度要求 , 输出角 置角, 度应不超过其极限角( 假设为极限最大角) , 即 θ2 ≤ δ 建立可靠性安全边界方程 M = δ - θ2 当 M ≥ 0 时, 满足机构运动精度要求。 当 M < 0 时, 不满足机构运动精度要求。 工程上允许的极限角 δ 的值和其方差 σ δ 之间 的关系可用下式描述 ( 8) ( 7)
* 2i * * * * * = f ( L1 L2 L3 X* Y* d* J* K* i , θ1 i , i, i, i, i , i , i , i , i ) i = 1, 2, 3, …, N ( 14 )
槡
假设单个铰接点的铰链初始间隙 J ~ N( 0 . 1 , 0 . 05 ) , 磨损量为 0 , 传动过程中空间连杆受压, 锁销 0. 1) , 锁定舱门的最小极限角 δ ~ N( 62 , 结合锁机 构其他参数, 运用上述所介绍的方法计算该锁机构 的运动精度可靠性。锁机构运动精度可靠性分析数 据见表 2 。
2 * 2 σ δ + σ θ2
( 10 ) ( 11 )
B = - 2 ( d + L1 cosθ1 ) L3 - ( d + L1 cosθ1 )
2 2
P f = ( - β ) - 3 机构运动精度可靠性分析
槡
( X - L1 sinθ1 - Ysinβ)
考虑任意空间四连杆机构的杆长尺寸误差、 铰
Abstract: In this paper,a new method for solving output angles of arbitrarily space fourlinks mechanism is developed. The simplified model is established considering dimension errors of link length,including angles of links,initial clearances of hinges and different wear loss from reliability standpoint. Then reliability of kinetic accuracy of arbitrarily space fourlinks mechanism is analyzed. Futhermore,an example of lock mechanism on door system of a certain airplane is given,of which the reliability of kinetic precision is calculated by such method. Finally,a contrast model is built in order to provide reference for analyzing the effects imposed on reliability by different wear loss in engineering calculation. Key words: space fourlinks; wear; clearance; kinetic accuracy; reliability 随着结构、 机构可靠性分析方法和设计理论及 其它相关安全理论的日渐成熟, 机构构件发生强度 故障而引起的事故已越来越少, 相比之下, 机构的运 动精度问题则显得日益突出。 由于构件存在尺寸、 间隙、 磨损等偏差, 从而使从动件的运动偏差具有不 [1 ~ 3 ] , 确定性 其运动精度具有随机性, 所以为保证机 构的运动精度, 对其进行偏差分析和可靠性定量计 算是非常必要的。 近年来, 国内外学者对连杆机构运动精度做了 [4 ~ 10 ] [4 ~ 7 ] , , 很多研究 但多针对于平面连杆机构析
815
对其运动输出精度提出更通用的计算方法 。 A 点和 D 点 图 1 所示为任意空间四连杆 ABCD, AB 为主动杆, CD 为从动杆, BC 为空间 为铰链支座, B、 C 两点为铰接点。 连杆, 主动杆以 A 点为圆心, 转 从动杆以 D 点为圆心, 转动平面与主动 动平面为 P 。 且两平面交线为 杆转动平面 P 的夹角为 ( 弧度 ) , ZZ' ( 后面简称为 Z 轴 ) 。 过 Z 轴做平面 P 的垂面 Q( 图中虚线框) , 各点、 线在 Q 面投影如图 1 所示。
816
机械科学与技术 表1 参数名称及单位 L1 / mm L2 / mm L3 / mm X / mm Y / mm d / mm /° 锁机构空间四连杆参数 均值 40 162 40 16 31 183 96. 5 97
第 31 卷
链初始间隙和磨损量时, 各项输入参数均为随机变 , 量 假设各随机变量服从正态分布。 B、 C 处铰链初始间隙和磨损量的影响表 其中, L2 的随机 现为连杆 BC 的等效长度发生变化, 因此, 还需要考虑两端 长度除了取决于杆长自身误差外,
顾井峰
摘
要:提出了一种任意空间四连杆机构运动输出的求解方法 , 并从可靠性角度出发,考虑杆长尺 寸偏差、 铰链间隙和磨损等因素, 建立可靠性简化模型, 分析了任意空间四连杆机构输出运动精度
的可靠性。再以某型飞机舱门锁机构为算例 , 计算其锁定精度可靠性。最后建立对比模型, 分析磨 为机构可靠性计算提供参考, 具有重要的工程应用价值。 损量变化对该类机构可靠性的影响 , 词:空间四连杆; 磨损; 间隙; 运动精度; 可靠性 8728 ( 2012 ) 05081404 中图分类号:TH113 文献标识码:A 文章编号:1003关 键
表2 锁机构运动精度可靠性分析数据 失效概率 P f 9. 072 6 × 10 - 8
图1 任意空间四连杆机构简图
[ 11 ] 此, 输出角应该为一或两个值 。从推导结果上看,
取 Z 到 Z' 为 Z 轴正向, 规定主、 从动杆在各自 转动平面内, 自 Z 轴正向起向 Z 轴方向转动称为正 正向转过的弧度角称为其位置角 , 如图 1 中 向转动, θ1 为主动杆 AB 的位置角 ( 即输入角 ) , θ2 为从动杆 CD 的位置角 ( 即输出角 ) 。 B、 C、 D、 C' 、 D' 分 过点 A、 别向 Z 轴作垂线, 对应交点如图 1 所示。 BC = L2 , CD = L3 , AF = X , 设定长度 AB = L1 , DG = Y, FG = d。 根据空间几何关系, 可得空间连杆 L2 的表达式 L = EC' + ( BE - CC' ) 式中: CH = Y - L3 sinθ2 β = EC' 2 = ( CHcosβ)
[9 , 10 ]
。部分学者还对机构运动精度开展了可靠
性研究
, 但其研究方法多偏于理论, 较难应用于 工程实践。因此本文针对任意布局下的空间四连杆
[4 ~ 8 ]
机构开展运动精度及其可靠性研究, 运用等效转换 法进行偏差分析和模型简化, 建立了方便工程应用 的可靠性模型, 最后以某型飞机舱门锁机构为算例 , 分析了机构参数对运动精度可靠性的影响 。 1 机构运动分析 10]分析了 RSSR 机构 ( 主、 文献[ 从动摇臂转 轴互相垂直的空间四连杆机构 ) 的运动输出, 本文 针对主、 从动摇臂转轴任意角度的空间四连杆机构 ,
2012 年 第 31 卷
5月 第5 期
机械科学与技术 Mechanical Science and Technology for Aerospace Engineering
May Vol. 31
2012 No. 5
任意空间四连杆机构运动精度及其可靠性分析
顾井峰, 冯蕴雯, 冯元生
( 西北工业大学 航空学院, 西安 710072 )
( 1)
π -φ 2
2
+ ( d + L1 cosθ1 - L3 cosθ2 )
| δ | = kσ δ
( 9)
BE = X - L1 sinθ1 CC' = CHsinβ B、 C 可得 式( 1 ) 展开整理, 引入中间变量 A、 A B C sinθ2 + cosθ2 = 2 2 2 2 2 A +B A +B A + B2 槡 槡 槡 ( 2) 式中: A = 2 ( X - L1 sinθ1 - Ysinβ) L3 sinβ - 2 YL3 ( cosβ)
2 C = L2 2 - L 3 - ( Y cos β ) 2 2
式中: k 的取值与要求的精度有关, 精度越高,k 的 值越小。 假设机构输出角 θ2 和极限角 δ 都服从正态分布 θ2 ~ N( μ θ2 ,σ θ2 ) , δ ~ N( μ δ ,σ δ ) 则机构精确运动的可靠性系数 β 及其失效概率 P f 分别为 β = μ δ - μ θ2
2 2
( 5)
则输出角 θ2 表达式为 ( 6) θ2 = θ + K + π 或 θ2 = θ - K 如图 1 , 对于一套空间四连杆机构, 当其输入角 θ1 限定后, 主动杆 AB 的位置是确定的, 从动杆 CD 的 以 BC 为半 位置会有一或两种情况( 即以 B 点为球心, 因 径的球面与从动杆转动圆周相交于一或两个点) ,