关于Step7与KUKA库卡机器人外部自动启动配置总结
关于Step7与KUKA库卡机器人外部自动启动配置总结

初始化 检查是否在原点
机器人回原点轨迹
等待PLC程序启动信号
调用1号程序
调用2号程序
调用3号程序
27th August 2014
17
六、PLC程序-机器人控制功能块配置
关键词: • Step7 • PLC • KUKA • KRC4 • Profinet • Profisafe • 机器人 • 试教器 • 输入 • 输出
27th August 2014
3
3
目录
1 接口信号定义说明 2 机器人外部运行控制接口配置 3 机器人外部自动启动IO信号配置 4 机器人外部自动启动时序 5 机器人程序配置 6 PLC程序-机器人控制功能块配置
27th August 2014
24
六、PLC程序-机器人控制功能块配置
机器人自动启动使能条件 机器人报警和线体报警反馈
机器人急停安全回路控制
机器人区域安全 安全回路控制
27th August 2014
25
六、PLC程序-机器人控制功能块配置
通过PLC外部自动启动机器人,上述控制能块介绍的引脚信号都是机器人控制和外部启动的必要条 件,缺一不可,至于输出,这里不做介绍,主要是给PLC内部逻辑编写和状态显示使用。 除了上述PLC对机器人控制块的配置信号外,机器人外部自动启动信号交换还需要其它前提条件
下面讲述如何配置“#Robot-KUKA”标准功能块来进行外部自动启动机器人控制。
27th August 2014
18
六、PLC程序-机器人控制功能块配置
KUKA外部轴配置方法,偷偷分享的
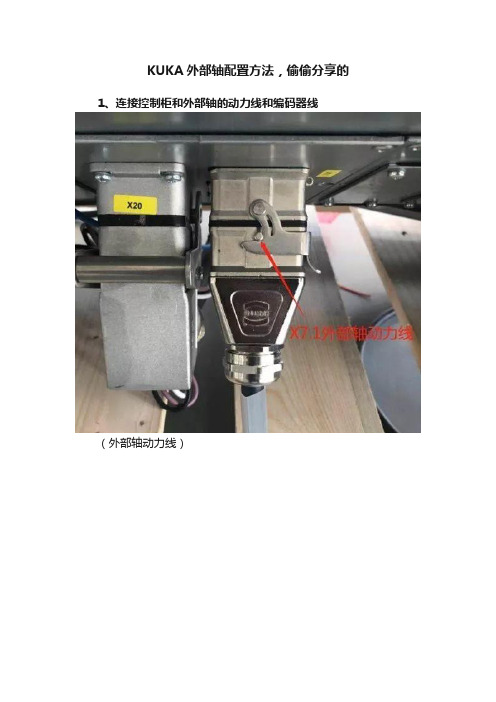
KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
FANUC 机器人由PLC控制外部自动启动,暂停。

本文介绍了FANUC机器人由PLC外部控制自动启动,暂停,再启动的工作流程。
包含PLC程序和机器人的设定工作流程1.UI1 和UI2一直为ON后 ,延时0.5S UI3一直为ON2,延时0.5s后,UI8一直为ON3.延时0.5S后。
UI5位ON,过0.5s后 OFF如果机器人不在暂停状态 第一次启动 UI9 和UI17 ON UI18为ON-OFF4.延时0.5后。
如果机器人不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON5.延时0.5后 如果机器人不在暂停状态==UO4 不为ON, 则UI17为ON6.UI17 ON了以后,如果机器人不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF如果机器人在暂停状态 启动后又暂停了 UI9 U17 UI18 不需要再次启动7 延时0.5后 。
如果机器人在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFFUI1和UI2UI3和UI8UI5和UI9-16机器人示教器设定机器人启动方式有2种,其实没什么区别,其实根据情况选择,8个机器人输入信号==RSR1-8或PNS1-8 设定流程如下1.参考资料选择哪一种启动方式2.正常状态如下3.系统设定第一步======1.专用外部信号==启动2.所选程序的调用PNS===启动远程/本地设定===远程5.系统设定第3步6. 2种方式其一PNS==========================================RSR=====================================机器人点位介绍机器人正常启动后的状态如下 可以参考。
KUKA机器人操作

KUKA机器人操作嘿,朋友!今天咱们来聊聊 KUKA 机器人操作这档子事儿。
我先跟您唠唠我之前遇到的一件有趣的事儿。
有一回,我带着一群学生去参观一家工厂,那儿就有 KUKA 机器人在忙活着。
其中一个学生特别好奇,一个劲儿地往前凑,结果不小心碰到了一个按钮,那机器人突然就停下了动作,把大家都吓了一跳!还好有技术人员及时赶来,重新设置才让它继续工作。
从那以后,这个学生再也不敢随便乱动啦。
咱们言归正传,先来说说 KUKA 机器人操作的基础知识。
操作KUKA 机器人,您得先了解它的基本构造。
这就好比您要开一辆车,得先知道方向盘、刹车在哪儿是一个道理。
KUKA 机器人通常由机械本体、控制系统、驱动系统和传感器等部分组成。
机械本体就是它的“身体”,控制系统就像是它的“大脑”,驱动系统是“动力源泉”,传感器则是它的“眼睛”和“耳朵”。
要想让 KUKA 机器人乖乖听话,您得学会编程。
编程可不像咱们平时写作文那么简单,它需要您用特定的编程语言和指令来告诉机器人要做什么。
比如说,您想让它从 A 点移动到 B 点,您就得准确地告诉它移动的速度、路径还有停留的时间。
这要是弄错了一点点,那它可就不知道跑哪儿去啦!再说说操作界面。
KUKA 机器人的操作界面就像是一个神秘的控制面板,上面有各种各样的按钮、图标和参数设置。
一开始看着可能会觉得眼花缭乱,但是别担心,只要您多熟悉熟悉,就会发现其实也没那么复杂。
就像我刚开始接触的时候,也是一头雾水,但是经过一段时间的摸索,慢慢就上手了。
操作 KUKA 机器人的时候,安全可是重中之重!您可千万别小瞧这一点。
每次操作之前,都得检查一下周围环境,确保没有障碍物,也没有人员在危险区域。
记得有一次,我在操作的时候,旁边有个工具没放好,差点就被机器人碰到了,那可真是惊险万分!所以啊,一定要小心再小心。
还有啊,KUKA 机器人的维护也不能马虎。
就像咱们人需要定期体检一样,机器人也需要定期检查、保养。
KUKA外部自动配置
• PGNO_FBIT_REFL 程序镜像第一位;为 正常使用该选项,变量 “REFLECT_PROG_NR”必须指定为“1”;
• ALARM_STOP _I 内部紧急关断;在内部 急停情况下复位该输出,正常为1,急停为0。
输出接口2及说明
• PRO_ACT 程序激活;如 果机器人在执行程序,则该 输出为真;
• PGNO_REQ 程序号请求; 请求PLC发送程序号;
• APPL_RUN 程序运行; 通过设定这个输出,设置机 器人控制器与PLC通讯,确定 程序正被执行的细节。
输出接口3及ห้องสมุดไป่ตู้明
• IN_HOME 在HOME位置;该输出与 PLC通讯,把机器人在HOME位置信号反 馈给PLC;
可以互相讨论下,但要小声点
机器人启动时序
1、T1模式下选择CELL程序,手动执行程序,注意中间路径,有时机器人不在HOME点附近,回原点的过 程中需慢速运行,直至到达BCO。
2、松开执行键,重新按下,信息栏出现“运行方式错误”提示,点击信息栏上的“全部OK”确认消息,松开 驱动及运行键,把机器人的运行模式打到“外部自动”即可。
操作步骤: 1、权限切换到“专家”用户组; 2、打开 程序CELL.SRC; 3. 在“CASE”段中将名称“EXAMPLE” 用相应的子程序名称进行替换 ,删除名称前 的分号; 4、关闭程序并保存更改; 5、若修改存在错误,则在保存后CELL程序 上会出现一个“×”标识,点击CELL,显 示出错误位置,对错误进行修改。
输出接口1及说明
• PERI_RDY 驱动装置就绪;通过设定这个 输出,设置机器人控制器与PLC通讯驱动器接 通的细节;
关于Step7与KUKA库卡机器人外部自动启动配置总结精编版

27th August 2014
15 15
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
4. 传递程序号并处理应用程序
27th August 2014
16 16
99
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
PLC >> KRC4
KRC4 >> PLC
265 27th August自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
机
器
人
外
部
自
动
启
动
时
序
表
27th August 2014
12 12
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
1. 接通驱动装置
27th August 2014
13 13
四、机器人外部自动启动时序
编写机器人运行过程中暂停条件 提供机器人在HMI翻页后的偏移地址
27th August 2014
填写PLC发给机器人的程序号(外部启动必须信号) 机器人反馈给PLC的实际运行程序号(外部启动必须信号) PLC给机器人发外部自动程序启动命令(外部启动必须信号)
FANUC机器人由PLC控制外部自动启动,暂停。

FANUC机器⼈由PLC控制外部⾃动启动,暂停。
本⽂介绍了FANUC机器⼈由PLC外部控制⾃动启动,暂停,再启动的⼯作流程。
包含PLC程序和机器⼈的设定⼯作流程1.UI1 和UI2⼀直为ON后,延时0.5S UI3⼀直为ON2,延时0.5s后,UI8⼀直为ON3.延时0.5S后。
UI5位ON,过0.5s后 OFF如果机器⼈不在暂停状态第⼀次启动 UI9 和UI17 ON UI18为ON-OFF4.延时0.5后。
如果机器⼈不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON5.延时0.5后如果机器⼈不在暂停状态==UO4 不为ON, 则UI17为ON6.UI17 ON了以后,如果机器⼈不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF如果机器⼈在暂停状态启动后⼜暂停了 UI9 U17 UI18 不需要再次启动7 延时0.5后。
如果机器⼈在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFFUI1和UI2UI3和UI8UI5和UI9-16机器⼈⽰教器设定机器⼈启动⽅式有2种,其实没什么区别,其实根据情况选择,8个机器⼈输⼊信号==RSR1-8或PNS1-8 设定流程如下1.参考资料选择哪⼀种启动⽅式2.正常状态如下3.系统设定第⼀步======1.专⽤外部信号==启动2.所选程序的调⽤PNS===启动远程/本地设定===远程5.系统设定第3步6. 2种⽅式其⼀PNS==========================================RSR=====================================机器⼈点位介绍机器⼈正常启动后的状态如下可以参考。
KUKA机器人使用经验总结讲解学习

KUKA机器人使用经验总结讲解学习1.机器人如何在一个平面内运动解决办法:设置工具坐标、基座标,然后在调用PTP、LIN、CIRC指令时设置所用坐标为基座标即可2.如何让机器人走相对位置解决方式:通过查资料及试验发现,展开所用命令LIN P1,所走的P1点的坐标存在XP1中,XP1是E6POS类型,可直接对XP1.X,XP1.Y,XP1.Z,XP1.A,XP1.B,XP1.C这六个坐标参数赋值,赋完值后,再执行LIN XP1,机器人就会走到赋值的坐标点,如此便可进行相对赋值,如P2点需要在P1点X轴方向再前进200mm,则可设为XP2.X=XP1.X+200;将当前机器人坐标值赋给指定的P3点方法为XP3=$POS_ACT3.如何与机器人建立通讯解决方法:当机器人为客户端时,写一个外部电脑的服务器程序,设置外部电脑IP,开启服务器监听程序,机器人端按照所给示例设置对应的XML配置文件,写相应的运行代码,解析通讯数据并做相应的回应,然后运行,通讯时外部电脑关掉防火墙,否则通讯不上。
机器人做服务器也是同理,区别只在于:机器人方面,XML配置文件中要改一下设置,外部电脑要改成客户端程序。
4.机器人外部IO如何使用解决方法:机器人外部IO由机器人自身供电,接线方式如下:判断机器人的指定输入端1是否有信号指令为WAIT FOR $IN[01],当端口1有信号,程序将会往下进行,否则一直等待。
设置输出端6的指令为$OUT[06]=TRUE,有几个输出信号为固定的安全类信号,不能设置,如OUT[01]默认为控制器就绪,OUT[02]默认为紧急关断闭合,OUT[08]默认为内部紧急关断等。
输入输出信号可在示教器的显示→输入/输出端→数字输入/输出端界面实时查看;5.如何通过外部传坐标点运行机器人解决方法:在机器人程序的XML通讯配置文档中的接收项里增加FRAME参数和S、T 两个参数(FRAME参数是保存机器人XYZABC 坐标值,两个int型参数保存S、T的值,FRAME 参数决定机器人的目标点位,S、T决定机器人的路径),然后在机器人程序中写读取指令,当机器人与外部电脑通讯时,收到这几个参数,再将参数值赋值给目标点位即可。