KUKA机器人外部自动配置方法
关于Step7与KUKA库卡机器人外部自动启动配置总结

初始化 检查是否在原点
机器人回原点轨迹
等待PLC程序启动信号
调用1号程序
调用2号程序
调用3号程序
27th August 2014
17
六、PLC程序-机器人控制功能块配置
关键词: • Step7 • PLC • KUKA • KRC4 • Profinet • Profisafe • 机器人 • 试教器 • 输入 • 输出
27th August 2014
3
3
目录
1 接口信号定义说明 2 机器人外部运行控制接口配置 3 机器人外部自动启动IO信号配置 4 机器人外部自动启动时序 5 机器人程序配置 6 PLC程序-机器人控制功能块配置
27th August 2014
24
六、PLC程序-机器人控制功能块配置
机器人自动启动使能条件 机器人报警和线体报警反馈
机器人急停安全回路控制
机器人区域安全 安全回路控制
27th August 2014
25
六、PLC程序-机器人控制功能块配置
通过PLC外部自动启动机器人,上述控制能块介绍的引脚信号都是机器人控制和外部启动的必要条 件,缺一不可,至于输出,这里不做介绍,主要是给PLC内部逻辑编写和状态显示使用。 除了上述PLC对机器人控制块的配置信号外,机器人外部自动启动信号交换还需要其它前提条件
下面讲述如何配置“#Robot-KUKA”标准功能块来进行外部自动启动机器人控制。
27th August 2014
18
六、PLC程序-机器人控制功能块配置
(完整版)KUKA机器人外部自动配置方法
机器人外部自动启动配置方法•不通过程序号而选定好要运行的程序的外部启动机器人通过下列步骤来外部启动机器人:步骤1、在T1模式下把用户程序按控制要求插入cell.src里,选定cell.src程序,把机器人运行模式切换到EXT_AUTO.步骤2、在机器人系统没有报错的条件下,PLC一上电就要给机器人发出$move_enable(要一直给)信号。
步骤3、PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤4、PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。
当机器人接到$drivers_on后发出信号$peri_rdy给PLC,当PLC接到这个信号后要把 $drivers_on断开。
步骤5、PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
•通过程序号(不校验奇偶)来选定程序的外部启动机器人。
需要配置的信号:PRNO_FBIT:表示位字节的第一位。
例如,用$IN[11] ---$IN[17]来映射给变量PGNO,这时PRNO_FBIT为11,意思是PRNO_FBIT是这个区域的第一位。
PGNO_LENGTH:表示映射给变量PGNO的数据长度,以上例来说,这时PGNO_LENGTH为7,变量PGNO最大值为127.PGNO_PARITY:程序号奇偶位校验,没有特别要求,不需要校验的话该值设置为0.PGNO_VAILD:程序号有效,机器人信号输入端的位信号。
把位信号编号编写在其后面,如,用$IN[18]来表示此程序号有效的话,当$IN[18]为TRUE的时候,PLC发过来的程序号才有效。
PGNO_VAILD是个脉冲信号(脉宽1秒左右)。
每次改变程序号时,PLC都要让PGNO_VAILD为TRUE.否则机器人端的变量PGNO的值不会发生改变。
PGNO_REQ:机器人发给PLC的程序号请求信号,位信号。
KUKA外部轴配置方法,偷偷分享的
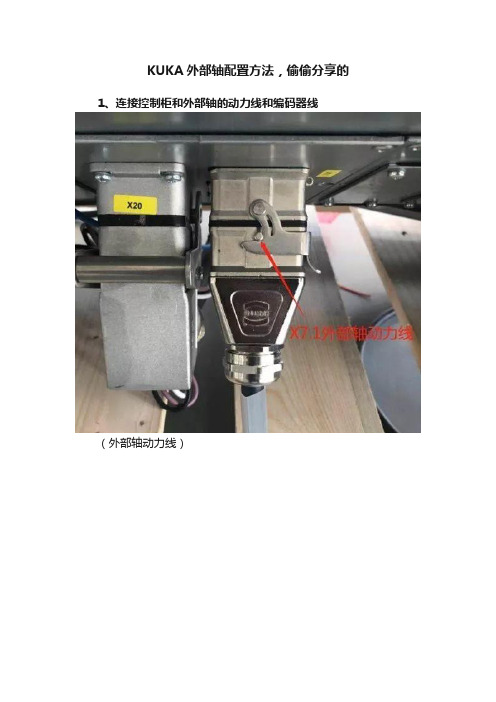
KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
kuka机器人外部轴配置步骤
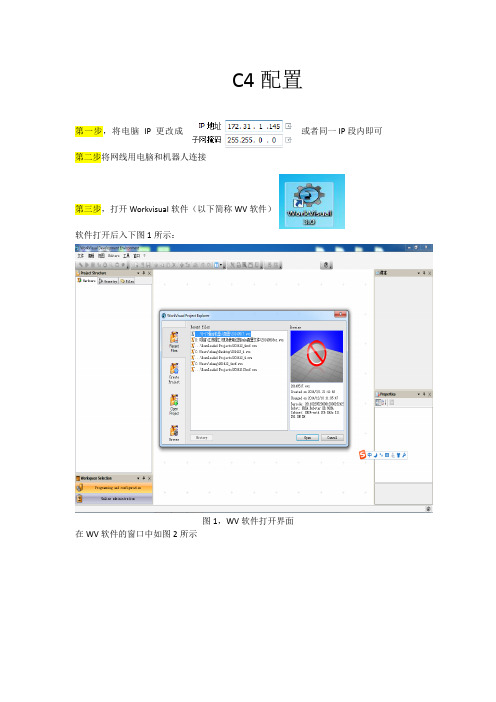
C4配置第一步,将电脑IP更改成或者同一IP段内即可第二步将网线用电脑和机器人连接第三步,打开Workvisual软件(以下简称WV软件)软件打开后入下图1所示:图1,WV软件打开界面在WV软件的窗口中如图2所示以前打开过的文档新建WV文档打开文档浏览在线机器人中的文档图2项目文件选择当选择Browse时,界面如图3所示点击刷新,即可显示,当前连接的机器人图3刷新后显示项目文件,带:绿色箭头”标志的为当前项目。
备注:在打开项目后将当前项目另存为文件,以免将原来的项目覆盖,在出问题时可以用此项目恢复。
打开VW文件后,界面如图4所示图4第四步,拍下外部轴点机的型号,如图5查找点机的Art-Nr 号,对应kuka文件查找电机的型号此处的数字为电机的订货号例如图5中的电机订货号后六位是121216,参考kuka文件中如图6,可查出电机型号为MX_110_130_40_S0图6第五步,现在开始添加外部轴,当kuka机器人有两个外部轴系统时,原则上先添加直线导轨外部系统,再配旋转轴外部系统。
下面配置示例的就是直线导轨外部轴单击geometric view项中右击添加Mx_110_130_40_S0,如图7图7 添加外部轴电机添加完后把KR60HA_3拖到MX_60_110_30_S0的FLANGE BASE下面,如图8电机型号电机订货号单击右下角添加Mx_110_130_40_S0,如图9保存——》设置参数——》保存——》编译,参数设置在如图10中图10参数主要有限位,电机转向,轴的类型,减速比等参数轴类型Linear 直线导轨Rotatory 旋转轴Endless 无限旋转轴电机转向,正负电机负限位电机正限位减速比电机负限位电机正限位注:如果需要做耦合,就必须将坐标转换值输入进去,数值由实际测量得出坐标转换值旋转轴配置和上面步骤相同,除了这步:添加完后把KR60HA_3拖到MX_60_110_30_S0的FLANGE BASE下面,如图8,这步配置旋转轴时不需要执行:文件/名录管理,把所有的文件移至右边。
关于Step7与KUKA库卡机器人外部自动启动配置总结 ppt课件

27th August 2014
22
背景
在GF2菲亚特项目软件设计中,关于KUKA机器人和西门子Step7编程软件的外部自动运行控制, 先前我们没有一个完善的总结,在每次项目调试中,我们依然需要花很多时间去搞清楚KUKA机器 人外部自动启动的原理,因此为了后续项目能够对KUKA外部自动启动的原理有个更清晰的理解, 特此以GF2项目软件调试经验做一个介绍和说明。
接口信号说明:
PLC >> KRC4 PGNO_TYPE- 程序号类型 此变量确定了以何种格式来读取PLC传送的程序编号,读取的格式有:二进制数值、 BCD 值、 “N 选 1” ,我们常用的是以 BCD 值(二进制)读取PLC程序号。 PGNO_LENGTH- 程序号长度 此变量确定了上级控制系统传送的程序编号的位宽。
机器人与PLC 的IO信号配置完成并且启动时序也清楚了,我们现在开始需要编写机器人启动调用 引导程序(即Cell程序)和PLC外部自动控制程序:
27th August 2014
初始化 检查是否在原点
机器人回原点轨迹
调用1号程序
等待PLC程序启动信号
调用2号程序
调用3号程序
1717
六、PLC程序-机器人控制功能块配置
2626
43
27th August 2014
2727
99
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
PLC >> KRC4
KRC4 >> PLC
265 27th August 2014
1010
kuka机器人外部轴配置步骤

kuka外部轴配置步骤本文档将详细介绍KUKA外部轴配置的步骤。
通过按照以下章节逐步操作,您将能够成功配置KUKA的外部轴。
1、确保断电并处于安全状态在配置外部轴之前,确保已经断电并处于安全状态。
这是为了避免在操作过程中引发意外情况。
2、定位外部轴的位置确定外部轴将被安装在的哪个位置。
根据具体应用需求,外部轴可以安装在的任何一侧。
3、安装外部轴和连接器将外部轴和连接器安装到上。
确保连接器正确插入控制系统的对应插槽,并紧固外部轴的螺栓以确保稳固。
4、连接电源线和通信线连接外部轴的电源线和通信线。
确保电源线正确连接到对应的电源接口,并将通信线连接到控制系统的通信接口。
5、连接外部轴的编码器信号线将外部轴的编码器信号线连接到控制系统的编码器接口。
确保编码器信号线正确连接,并紧固连接器以确保良好的接触。
6、配置控制系统通过控制系统对外部轴进行配置。
在对外部轴进行配置之前,确保您已经熟悉控制系统的操作界面和配置流程。
7、测试外部轴的运动完成配置后,进行外部轴的运动测试。
根据控制系统的提示,进行外部轴的各项运动测试,确保外部轴能够正常工作。
附件:本文档无附件。
法律名词及注释:1、外部轴(External Axis):指系统之外与系统进行连接并能够独立运动的轴。
2、(Robot):可以执行各种任务的可编程设备,通常由主体、关节和控制系统组成。
3、编码器(Encoder):一种测量旋转或线性运动的装置,通常用于计算位置和速度。
KUKA机器人PLC外部自动控制运行
图I 1-1: PLC 连接 系统结构原理为了在KR C4 PLC 之间吏第)5利进行通讯.必须满足以下几点: ■ 外部自动运行方式:在该运行万式F 由一台主机或者PLC 翌制机器人系 统 ■ CELL.SRC :从外部迭择机話人程序的控制程序。
■ PLC 和机器人之间的信号交换:用于瓦置险入和输出端信号的外部自动运 行接口 : 发送至机器人的控屜信号(输入端);开始和停止信号、程序编号、 故障确认 机器人状态(皆出端):驱动装直状态、位置、故障等等。
从如茹启动程序的安全须知送择了 CELL 程序石必须执行BCO 运行。
「不 *土1如果迭定的运动语句包括PTP 运行梧令,則BCO 运行将作为 三£1 PTP 运动从实际位置移动到目标位侵。
狐果迭定的运动语句包 括LIN 或CIRC ,则BCO 运行将作为LIN 运动被执行。
規奈此运动,防止鱼 ?to 在BCO 运行中速度自动降低。
如果己执行了 BCO 运行,則在界部启动时便不再执行BGO 运行。
心警豈| 没有停止。
在冰部自动运行中没有BCO 运行。
这表明,机器人在启动之后 以褊程的速長(没有减速)到达第一个编程位置•并且在那里 外部程序启动的择作步骤 前提条件 ■ 在运行方式T 1或T 2 T■用于外部自动运行的输入/输出當和CELL.SRC 程序已配匱。
1. 在导航器中迭I? CELL.SRC 程序。
CELL 程序始终在目录KRC:\RI T2. 将程序倍率设定为100%。
(以上为洼议的设定但。
也可根抵需要设定其它数值。
)前言:本文档介绍KUKA 机器人作为下位机,PLC 作为上位机的 外部自动运行的设定方法以及程序结构11.1 由PLC 启动程洋的准备工作如果机器人进程应由一个中央位置进行控制(如由一个主机或PLC ).则这 一控制通过升都自动运行接□进行。
机器人与系统相连图I卜2:选择Oil和设簷手动倍翠1 HOV设置2 选定Cell.src3. 执行BCO运行:按住韵认开关。
KUKA机器人外部自动配置
KUKA机器人外部自动配置关键信息项:1、机器人型号:____________________2、外部自动配置功能描述:____________________3、配置所需硬件设备:____________________4、配置软件及版本:____________________5、配置实施时间:____________________6、验收标准:____________________7、维护与支持期限:____________________8、费用及支付方式:____________________1、协议概述11 本协议旨在规范和明确关于 KUKA 机器人外部自动配置的相关事宜,确保配置工作的顺利进行和各方权益的保障。
2、机器人及配置要求21 明确所需配置的 KUKA 机器人型号及相关技术规格。
211 详细说明机器人的工作环境和任务需求。
212 阐述对机器人运动范围、精度、负载能力等方面的要求。
22 外部自动配置功能的详细描述221 包括但不限于自动感知、自动路径规划、自动执行任务等功能。
222 说明各功能的实现方式和预期效果。
3、配置所需硬件设备31 列出所需的传感器、控制器、执行器等硬件设备的品牌、型号和数量。
311 对硬件设备的性能参数和兼容性进行说明。
312 规定硬件设备的安装位置和连接方式。
4、配置软件及版本41 明确使用的配置软件名称、版本及相关授权信息。
411 描述软件的功能模块和操作流程。
412 说明软件与硬件设备的集成方式和接口规范。
5、配置实施51 确定配置工作的开始时间和预计完成时间。
511 制定配置工作的进度计划,包括各个阶段的时间节点和工作内容。
512 规定双方在配置实施过程中的责任和义务。
52 配置过程中的测试与调试521 制定测试方案和测试用例,确保配置后的机器人性能符合要求。
522 对测试过程中发现的问题进行及时调试和解决。
6、验收标准61 明确验收的依据和标准,包括功能指标、性能指标、稳定性指标等。
关于Step与KUKA库卡机器人外部自动启动配置总结PPT教案
第19页/共28页
20
六、PLC程序-机器人控制功能块配置
配置机器人外部工具的数量 配置机器人在HMI画面被选择操作按钮
第20页/共28页
21
六、PLC程序-机器人控制功能块配置
生产线启动机器人的外部启动条件 生产线停止机器人的外部停止条件 该信号常规为“1” 机器人全部工作结束反馈信号
机器人循环自动启动运行条件
PLC >> KRC4
KRC4 >> PLC
265
第10页/共28页
11
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人 交互IO进行点号对应配置,具体如下:
KRC4 >> PLC
KRC4 >> PLC
第11页/共28页
12
第21页/共28页
22
六、PLC程序-机器人控制功能块配置
生产线启动机器人的外部启动条件 生产线停止机器人的外部停止条件 该信号常规为“1” 机器人全部工作结束反馈信号
机器人循环自动启动运行条件
第22页/共28页
23
六、PLC程序-机器人控制功能块配置
编写机器人运行过程中暂停条件 提供机器人在HMI翻页后的偏移地址
关键词: • Step7 • PLC • KUKA • KRC4 • Profinet • Profisafe • 机器人 • 试教器 • 输入 • 输出
第3页/共28页
44
目录
1 接口信号定义说明 2 机器人外部运行控制接口配置 3 机器人外部自动启动IO信号配置 4 机器人外部自动启动时序 5 机器人程序配置 6 PLC程序-机器人控制功能块配置
KUKA机器人外部自动配置方法
KUKA外部自动配置方法[正文]章节一、引言本文档旨在介绍KUKA的外部自动配置方法。
通过该方法,用户可以自动设置和调整的各种参数,以满足特定的应用需求。
本文将详细介绍配置方法的步骤和注意事项。
章节二、配置准备在开始配置之前,需要准备以下工作:1、KUKA软件包2、与连接的计算机3、控制器的IP地质和用户名密码章节三、连接和计算机配置步骤如下:1、将和计算机通过以太网线连接。
2、在计算机上打开网络设置,配置IP地质和子网掩码,确保与处于同一局域网内。
3、确保控制器已开启,并保证用户名密码正确。
章节四、启动KUKA软件1、在计算机上安装KUKA软件包。
2、打开软件,并选择自动配置功能。
章节五、执行自动配置1、在自动配置功能中,选择连接的控制器。
2、开始自动配置按钮,系统将自动识别的型号和参数。
3、根据需要,设置的工作区域、速度、加速度等参数。
4、确认配置无误后,保存设置并退出自动配置功能。
章节六、验证配置结果1、重新启动控制器,确认配置的参数已成功生效。
2、运行简单的程序,观察的动作情况。
3、如有需要,可以通过手动调整参数进行微调。
章节七、安全注意事项在进行外部自动配置过程中,需要注意以下安全事项:1、在配置过程中,确保周围没有人员和障碍物。
2、了解的工作范围和安全边界,避免潜在的危险。
3、遵循KUKA官方的安全操作规范和指导文件。
[附件]本文档附带以下附件:1、KUKA外部自动配置软件包。
2、配置过程中可能用到的示例程序和文件。
[法律名词及注释]1、:指KUKA公司生产的工业,具有自主操作和控制能力。
2、自动配置:指通过计算机软件自动设置和调整的参数和配置。
3、IP地质:指网络中用来标识计算机或网络设备的数字地质。
4、用户名密码:指用来验证用户身份和控制权限的登录信息。
5、软件包:指一组相关软件程序的打包和发布形式。
[结束语]本文档提供了详细的KUKA外部自动配置方法,希望能够帮助用户快速、准确地完成的配置工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人外部自动启动配置方法
•不通过程序号而选定好要运行的程序的外部启动机器人
通过下列步骤来外部启动机器人:
步骤1、在T1模式下把用户程序按控制要求插入cell.src里,选定cell.src程序,把机器人运行模式切换到EXT_AUTO.
步骤2、在机器人系统没有报错的条件下,PLC一上电就要给机器人发出
$move_enable(要一直给)信号。
步骤3、PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤4、PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。
当机器人接到$drivers_on后发出信号$peri_rdy给PLC,当PLC接到这个信号后要把 $drivers_on断开。
步骤5、PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
•通过程序号(不校验奇偶)来选定程序的外部启动机器人。
需要配置的信号:
PRNO_FBIT:表示位字节的第一位。
例如,用$IN[11] ---$IN[17]来映射给变量
PGNO,这时PRNO_FBIT为11,意思是PRNO_FBIT是这个区域的第一位。
PGNO_LENGTH:表示映射给变量PGNO的数据长度,以上例来说,这时
PGNO_LENGTH为7,变量PGNO最大值为127.
PGNO_PARITY:程序号奇偶位校验,没有特别要求,不需要校验的话
该值设置为0.
PGNO_VAILD:程序号有效,机器人信号输入端的位信号。
把位信号编号编写
在其后面,如,用$IN[18]来表示此程序号有效的话,当
$IN[18]为TRUE的时候,PLC发过来的程序号才有效。
PGNO_VAILD是个脉冲信号(脉宽1秒左右)。
每次改变程序号
时
,PLC都要让PGNO_VAILD为TRUE.否则机器人端的变量PGNO
的值不会发生改变。
PGNO_REQ:机器人发给PLC的程序号请求信号,位信号。
准确配置完以上信号后,通过下列步骤来外部启动机器人:
步骤1、在T1模式下把用户程序按控制要求插入cell.src里,选定cell.src程序,把机器人运行模式切换到EXT_AUTO.
步骤2、在机器人系统没有报错的条件下,PLC一上电就要给机器人发出
$move_enable(要一直给)信号。
步骤3、PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤4、PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。
当机器人接到$drivers_on后发出信号$peri_rdy给PLC,当PLC接到这个信号后要把
$drivers_on断开。
步骤5、PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
步骤6、当PLC接收到PGNO_REQ信号后, PLC要把程序号发给机器人
步骤7、当PLC发出程序号500ms后,PLC发给机器人$PGNO_VAILD(脉冲信号,脉宽约1000ms),以便让机器人的变量PGNO值生效。
如果生产过程切换程序号的话,重复步骤6和步骤7.
外部停止机器人和停止后启动机器人:
停止机器人:断掉信号$drivers_Off,这种停止是断掉机器人伺服。
停止后继续启动机器人:重复步骤3、4,5就可以启动机器人。
•机器人故障复位方法:
当机器人有“确认信号”(故障)时,PLC发给机器人$conf_mess(脉冲信号)就可以复
位。
通过外部自动启停,复位机器人的信号需要在示教器里配置,路径:
登陆用户组“Safety Maintenance”权限---配置---外部自动运行---把输入端和输出端的信号配置完成。
•机器人输出常用信号
1、$alarm_stop(机器人急停信号) 正常时该信号逻辑为1,当机器人急停被按下时逻
辑为0.
2、$rc_rdy1(控制柜就绪) 正常时该信号逻辑为1,当机器人有“确认信息”时逻辑为
0,“确认信息”被确认后,逻辑为1.
3、$pro_act 机器人在运行程序时输出为1.
4、$in_home机器人在home点时输出为1.。