关于Step7与KUKA库卡机器人外部自动启动配置总结精编版
KUKA外部轴配置方法,偷偷分享的
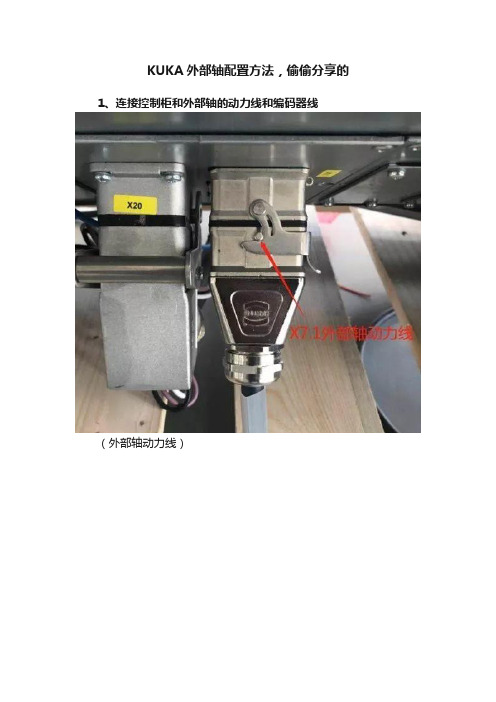
KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
FANUC 机器人由PLC控制外部自动启动,暂停。

本文介绍了FANUC机器人由PLC外部控制自动启动,暂停,再启动的工作流程。
包含PLC程序和机器人的设定工作流程1.UI1 和UI2一直为ON后 ,延时0.5S UI3一直为ON2,延时0.5s后,UI8一直为ON3.延时0.5S后。
UI5位ON,过0.5s后 OFF如果机器人不在暂停状态 第一次启动 UI9 和UI17 ON UI18为ON-OFF4.延时0.5后。
如果机器人不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON5.延时0.5后 如果机器人不在暂停状态==UO4 不为ON, 则UI17为ON6.UI17 ON了以后,如果机器人不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF如果机器人在暂停状态 启动后又暂停了 UI9 U17 UI18 不需要再次启动7 延时0.5后 。
如果机器人在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFFUI1和UI2UI3和UI8UI5和UI9-16机器人示教器设定机器人启动方式有2种,其实没什么区别,其实根据情况选择,8个机器人输入信号==RSR1-8或PNS1-8 设定流程如下1.参考资料选择哪一种启动方式2.正常状态如下3.系统设定第一步======1.专用外部信号==启动2.所选程序的调用PNS===启动远程/本地设定===远程5.系统设定第3步6. 2种方式其一PNS==========================================RSR=====================================机器人点位介绍机器人正常启动后的状态如下 可以参考。
库卡kuka经典编程经典实用

库卡kuka经典编程
二、创建机器人程序
(用户:专家模式)
【Cell】:外部自动运行时的牵引程序(有且仅 能存在一个) 【Expert】和【Modul】:用户程序(由SRC和DAT 文件构成) 【Expert Submit】和【Submit】:后台程序 【Function】:功能模块程序
POS_2={A1 30,A2 30,A3 20,A4 60,A5 10,A6 30} STATUS=1
POS_1=FORWARD(POS_2, STATUS) END
库卡kuka经典编程【案例来自】利用功能程序实现提示信息的功能
用到的功能函数
效果界面
库卡kuka经典编程
库卡kuka经典编程
【案例8】利用功能程序实现弹窗选择的功能
【注】详见《机器人编程2》第五章:用变量来运动编程
库卡kuka经典编程
4.4创建复杂的数据类型—结构
库卡kuka经典编程
库卡kuka经典编程
五、程序的流程控制
为什么用continue指令?
阻止预进停止,机器人动 作流程顺畅
流程控制
库卡kuka经典编程
5.1 信号等待
库卡kuka经典编程
5.2 时间等待
案例4、建立函数传递的子程序
库卡kuka经典编程
子程序
主程序 DEF MY_PROG( ) DECL REAL S S=1
CALC(S)
END
子程序 DEF CALC( NUM:OUT) DECL REAL NUM NUM=NUM+1
END
功能程序
主程序
DEF MY_PROG( ) DECL REAL S DECL INT R S=1
FANUC机器人由PLC控制外部自动启动,暂停。

FANUC机器⼈由PLC控制外部⾃动启动,暂停。
本⽂介绍了FANUC机器⼈由PLC外部控制⾃动启动,暂停,再启动的⼯作流程。
包含PLC程序和机器⼈的设定⼯作流程1.UI1 和UI2⼀直为ON后,延时0.5S UI3⼀直为ON2,延时0.5s后,UI8⼀直为ON3.延时0.5S后。
UI5位ON,过0.5s后 OFF如果机器⼈不在暂停状态第⼀次启动 UI9 和UI17 ON UI18为ON-OFF4.延时0.5后。
如果机器⼈不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON5.延时0.5后如果机器⼈不在暂停状态==UO4 不为ON, 则UI17为ON6.UI17 ON了以后,如果机器⼈不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF如果机器⼈在暂停状态启动后⼜暂停了 UI9 U17 UI18 不需要再次启动7 延时0.5后。
如果机器⼈在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFFUI1和UI2UI3和UI8UI5和UI9-16机器⼈⽰教器设定机器⼈启动⽅式有2种,其实没什么区别,其实根据情况选择,8个机器⼈输⼊信号==RSR1-8或PNS1-8 设定流程如下1.参考资料选择哪⼀种启动⽅式2.正常状态如下3.系统设定第⼀步======1.专⽤外部信号==启动2.所选程序的调⽤PNS===启动远程/本地设定===远程5.系统设定第3步6. 2种⽅式其⼀PNS==========================================RSR=====================================机器⼈点位介绍机器⼈正常启动后的状态如下可以参考。
KUKA机器人启动时序

KUKA启动时序KUKA启动时序1.系统准备1.1 确保所有程序、示教器程序和相关设备程序都已正确安装在控制器上。
1.2 确保所有操作员具备必要的培训和资质,并且了解的操作流程和安全规范。
1.3 检查控制器的电源和网络连接是否正常。
2.首次启动2.1 执行器件检查和润滑:检查的执行器件是否安装正确,并根据操作手册进行必要的润滑。
2.2 检查传感器和外设连接:确保传感器和外设已正确连接,并进行必要的校准。
2.3 控制器启动:按照操作手册中的指引,将控制器启动并进行初始化设置。
3.网络配置3.1 设置IP地质:根据网络环境的要求,在控制器中设置正确的IP地质和子网掩码。
3.2 配置网络参数:根据实际需求,配置的网络参数,如网关、DNS服务器等。
4.程序加载和校验4.1 确认控制器中已经加载了所需的程序。
4.2 检查程序的正确性:对加载的程序进行校验,确保程序的正确性和可靠性。
4.3 设置程序变量:根据实际需求,设置程序中的变量和参数。
5.安全设置5.1 设置安全区域:根据实际工作环境,设置的安全区域,并使用围栏或其他安全设备进行固定和封闭。
5.2 配置保护装置:根据工作需求,配置的保护装置,如安全门、光栅等。
5.3 设置急停开关:确保的急停开关设置正确,并进行必要的测试和演练。
6.手动操作和示教6.1 手动操作:使用示教器或HMI界面,进行的手动操作,如移动、旋转等。
6.2 示教:按照操作手册中的指引,进行的示教操作,如示教路径、示教程序等。
6.3 验证示教结果:根据示教的路径和程序,验证示教结果的正确性。
7.启动7.1 确认工作环境安全:确保周围没有障碍物,并保持操作区域的整洁和安全。
7.2 启动控制器:按照操作手册中的指引,启动控制器。
7.3 执行启动程序:加载并执行的启动程序。
附件:1.操作手册:包含的操作流程、安全规范以及启动程序的设置和操作说明。
2.示例程序:用于演示启动时序的示例程序。
法律名词及注释:1.IP地质:IP地质是Internet Protocol Address的缩写,用于唯一标识连接到互联网的设备的地质信息。
KUKA机器人使用经验总结讲解学习

KUKA机器人使用经验总结讲解学习1.机器人如何在一个平面内运动解决办法:设置工具坐标、基座标,然后在调用PTP、LIN、CIRC指令时设置所用坐标为基座标即可2.如何让机器人走相对位置解决方式:通过查资料及试验发现,展开所用命令LIN P1,所走的P1点的坐标存在XP1中,XP1是E6POS类型,可直接对XP1.X,XP1.Y,XP1.Z,XP1.A,XP1.B,XP1.C这六个坐标参数赋值,赋完值后,再执行LIN XP1,机器人就会走到赋值的坐标点,如此便可进行相对赋值,如P2点需要在P1点X轴方向再前进200mm,则可设为XP2.X=XP1.X+200;将当前机器人坐标值赋给指定的P3点方法为XP3=$POS_ACT3.如何与机器人建立通讯解决方法:当机器人为客户端时,写一个外部电脑的服务器程序,设置外部电脑IP,开启服务器监听程序,机器人端按照所给示例设置对应的XML配置文件,写相应的运行代码,解析通讯数据并做相应的回应,然后运行,通讯时外部电脑关掉防火墙,否则通讯不上。
机器人做服务器也是同理,区别只在于:机器人方面,XML配置文件中要改一下设置,外部电脑要改成客户端程序。
4.机器人外部IO如何使用解决方法:机器人外部IO由机器人自身供电,接线方式如下:判断机器人的指定输入端1是否有信号指令为WAIT FOR $IN[01],当端口1有信号,程序将会往下进行,否则一直等待。
设置输出端6的指令为$OUT[06]=TRUE,有几个输出信号为固定的安全类信号,不能设置,如OUT[01]默认为控制器就绪,OUT[02]默认为紧急关断闭合,OUT[08]默认为内部紧急关断等。
输入输出信号可在示教器的显示→输入/输出端→数字输入/输出端界面实时查看;5.如何通过外部传坐标点运行机器人解决方法:在机器人程序的XML通讯配置文档中的接收项里增加FRAME参数和S、T 两个参数(FRAME参数是保存机器人XYZABC 坐标值,两个int型参数保存S、T的值,FRAME 参数决定机器人的目标点位,S、T决定机器人的路径),然后在机器人程序中写读取指令,当机器人与外部电脑通讯时,收到这几个参数,再将参数值赋值给目标点位即可。
KUKA机器人启动时序
KUKA启动时序
KUKA启动时序:
1、硬件准备
1、确保电源开关处于关闭状态。
2、确保控制器电源开关处于关闭状态。
3、检查周围的工作环境,确保无障碍物存在。
4、确保的各个关节和执行器处于正常工作状态。
5、检查的传感器和安全装置,确保正常运行。
2、软件准备
1、将控制器连接到计算机上。
2、打开控制器所需的软件工具。
3、检查控制器的固件版本,并及时更新到最新版本。
4、配置的网络连接,确保与其他设备的通信正常。
3、启动控制器
1、将控制器电源开关打开。
2、等待控制器完成启动过程。
3、检查控制器的状态指示灯,确保处于正常工作状态。
4、配置参数
1、进入控制器的参数设置界面。
2、配置的系统参数,如速度、加速度、精度等。
3、配置的安全参数,如安全区域、碰撞检测等。
4、配置的通信参数,如网络地质、通信协议等。
5、运行
1、将电源开关打开。
2、等待完成初始化过程。
3、选择合适的控制模式,并切换到相应的工作模式。
4、通过遥控器或计算机界面控制进行运动。
6、操作注意事项和维护
1、遵守的操作手册和相关安全规范。
2、定期检查各个部件的工作状态,如电机、传感器、执行器等。
3、及时清洁,防止灰尘和杂质影响其工作效果。
4、定期进行的维护保养,如更换润滑油、清理滑轨等。
附件:
本文档无附件。
法律名词及注释:无。
工业机器人现场编程-外部自动运行模式的定义和配置-课件
• 使用外部自动运行接口的输入/输出端 输入端(从机器人控制器的角度)
1)PGNO_TYPE——程序号类型 此变量确定了以何种方式来读取上级控制系 统传送的程序编号。 2) PGNO_LENGTH——程序号长度 此变量确定了上级控制系统传送的程序 编号的位宽。 3) PGNO_PARITY——程序号的奇偶位 上级控制系统传递奇偶位的输入端。 如果PGNO_TYPE的值为3,则PGNO_PARITY不被分析。 4) PGNO_VALID——程序号有效 上级控制系统传送读取程序号指令的输入 端。 5) $EXT_START——外部启动 启动或继续一个程序。 设定了该输入端后,输入/输出接口激活时将
6)$MOVE_ENABLE——允许运行
用于由上级控制器
对机器人驱动器进行检查。
7)$CONF_MESS——确认信息提示 通过给输入端赋
值,当故障原因排除后,上级控制器将自己确认故障信息,
但是仅分析信号的脉冲上升沿。
8)$DRIVES_ON——驱动装置接通
如果在此输入端
上施加了持续20ms的高脉冲,则上级控制系统会接通机
外部自动运行模式的定义和配置
主要内容
• 了解机器人与PLC之间进行通讯的前提条件 • 掌握进行外部自动运行的输入端/输出端接口有哪些,起 何作用 • 掌握KUKA机器人进行外部自动运行的操作步骤 • 掌握cell.src控制程序的使用步骤
采用上级控制系统作业
• 机器人与系统相连 条件:
1)机器人与PLC之间必须有物理上存在且已配置的现场 总线,如以太网。 2)必须通过现场总线传输机器人进程的信号,传输过程 通过外部自动运行接口协议中的可配置的数字输入端和输 出端信号来实现。
• 编辑cell.src程序的操作步骤 1)切换到专家用户组 2)打开cell.src程序 3)在case段中将名称example用相应要调用的程序名称 替换,并将example前的分号去掉,以使此行程序能被机 器人读取运行。 4)关闭程序并保存更改。 • 外部自动运行操作步骤 1)以选定方式打开程序文件cell.src 2)设定程序倍率至合适值,并将执行BCO运行 3)旋转两节管理器开关呢将其设置成外部自动运行模式,
机器人外部自动文档
机器人与PLC的联动控制1、PLC为主站2、机器人为主站下面介绍的是第一种。
一、通讯组态◆硬件连接CP5614A2卡中PB1为主站口,PB2为从站口。
DP接头连接CPU315 2DP的DP口及CP5614A2的PB2口。
由于为1主1从,电缆均连接Profibus接头的进口。
◆安装GSD文件选项菜单/安装GSD文件,通过浏览找到相关KUKA Roboter-GSD,执行相关安装步骤即可在在下图右上方看到已经安装好的KUKA 5614 Slave。
◆对PLC、机器人进行硬件组态CP5614的Profibus地址为10,与机器人KRC2的变量映射地址为INPUT 50-53,OUTPUT 50-53。
◆机器人通讯设置找到C\KRC\Roboter\Init中pfbms、iosys文件。
⏹Pfbms设置profibus的主、从站的使能及站地址➢[MASTER]MASTER_USED=0 屏蔽主站功能➢[SLA VE]MODUL_USED=1 激活从站功能MODUL_ADDRESS=10 根据硬件组态将从站地址设置为10iosys设置通讯驱动的使能及相关通讯的映射地址。
➢[DRIVERS]PBMASL=11,pbmsInit,pfbmsdrv.o 激活Profibus通讯➢[PBMASL]inw0=127,0,x2outw0=127,0,x2将机器人的系统输入、输出各2个字映射到Profibus的OUTW50、OUTW52,INW50、INW52。
①INW0:机器人的输入偏移地址(机器人第一位为1);②127:机器人做Profibus从站的默认地址;③0:CP5614A2的输出偏移地址,表示挂在CP5614A2物理上第一个地址;如下图所示:outw0=127,0,x4 IW50-53对应机器人1-32,IW 40-43对应机器人33-64④x2:2个字。
详细的说明可以阅读IOSYS下面的注释。
二、机器人变量为达到外部启动机器人的目的,需要在Configure/Automatic External设置相关参数,一般机器人的输入除$I_O_ACT、$DRIVES_OFF设置为1025(1025常闭,1026常开)外,其他都需要设置为外部变量(本例中将$DRIVES_OFF设置为外部变量)。
KUKA机器人外部启动配置信号
KUKA机器人配置外部启动忍不住吐槽一下,库卡的技术文档做的真的不咋地,看的人真心累,对于初学者尤其如此,而且网上的资料大多重复,很多问题找不到答案。
下面进入正题吧。
主要看一下外部启动相关的信号释义用PLC作为主站,KUKA机器人作为从站,PLC控制机器人启动的重要信号一览:信号具体含义如下:输入端(从机器人控制器的角度)➢PGNO_TYPE - 程序号类型此变量确定了以何种格式来读取上级控制系统传送的程序编号* 采用这种传递格式时,未对PGNO_REQ、PGNO_PARITY 以及PGNO_VALID 的值进行分析,因此无意义。
一般情况下设该值为1,符合大多数读写习惯➢PGNO_LENGTH - 程序号长度此变量确定了上级控制系统传送的程序编号的位宽。
值域:1 …16。
若PGNO_TYPE 的值为2,则只允许位宽为4、8、12 和16。
程序号变量所占用得地址宽度,例如设为8,则PGNO变量占一个BYTE➢PGNO_PARITY - 程序号的奇偶位上级控制系统传递奇偶位的输入端。
如果PGNO_TYPE 值为3,则PGNO_PARITY 不被分析。
这个没看太明白,但是不能胡乱设置,会影响程序号的传递。
目前设成0没发现问题➢PGNO_VALID - 程序号有效上级控制系统传送读取程序号指令的输入端。
这个信号别看太多了,只要知道是占用1bit的开关量信号就行了,在机器人启动并给定程序号后,发送该信号给机器人,相当于确认信号。
(忍不住也吐槽一下,就一个位信号,他这表格里说的正值,负值和0是指哪个,不明白唉)➢$EXT_START - 外部启动这个就简单直白了,启动信号,上升沿有效,可以给出去一段时间后撤销。
➢$MOVE_ENABLE - 允许运行由PLC给机器人的,配置Profinet后,该信号是机器人运动的必要前提条件,不管是EXT 模式还是T1模式,该信号必须给定并保持。
➢$CONF_MESS - 确认信息提示上升沿有效,相当于故障复位信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
27th August 2014
15 15
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
4. 传递程序号并处理应用程序
27th August 2014
16 16
99
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
PLC >> KRC4
KRC4 >> PLC
265 27th August自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
机
器
人
外
部
自
动
启
动
时
序
表
27th August 2014
12 12
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
1. 接通驱动装置
27th August 2014
13 13
四、机器人外部自动启动时序
编写机器人运行过程中暂停条件 提供机器人在HMI翻页后的偏移地址
27th August 2014
填写PLC发给机器人的程序号(外部启动必须信号) 机器人反馈给PLC的实际运行程序号(外部启动必须信号) PLC给机器人发外部自动程序启动命令(外部启动必须信号)
23 23
六、PLC程序-机器人控制功能块配置
二、机器人外部运行控制接口配置
机器人通过外部PLC进行控制,需要配置外部控制运行接口和通讯连接,运行接口包括:IO运行 接口和安全回路接口。
IO运行接口配置 1、在机器人试教器通过安全组态界面组态运行控制方式
安全回路接口配置 2、在机器人安全组态界面进入通讯参数界面配置安全ID
27th August 2014
27th August 2014
22
背景
在GF2菲亚特项目软件设计中,关于KUKA机器人和西门子Step7编程软件的外部自动运行控制, 先前我们没有一个完善的总结,在每次项目调试中,我们依然需要花很多时间去搞清楚KUKA机器 人外部自动启动的原理,因此为了后续项目能够对KUKA外部自动启动的原理有个更清晰的理解, 特此以GF2项目软件调试经验做一个介绍和说明。
六、PLC程序-机器人控制功能块配置
通过PLC外部自动启动机器人,上述控制能块介绍的引脚信号都是机器人控制和外部启动的必要条 件,缺一不可,至于输出,这里不做介绍,主要是给PLC内部逻辑编写和状态显示使用。 除了上述PLC对机器人控制块的配置信号外,机器人外部自动启动信号交换还需要其它前提条件
➢ 机器人在外部自动远程模式 ➢ 机器人与PLC的通讯正常 ➢ 机器人的安全回路正常 ➢ 机器人没有外部重要报警
KRC4 >> PLC
KRC4 >> PLC
27th August 2014
11 11
四、机器人外部自动启动时序
机器人与PLC IO交互信号配置好了之后,我们需要知道PLC与机器人的启动时序,机器人的启动 时序主要分为4步,具体如下:
1. 接通驱动装置
2. 确认报警信息
3. 启动 Cell 程序
4. 传递程序号并处理应用程序
27th August 2014
77
二、机器人外部运行控制接口配置
机器人通过外部PLC进行控制,需要配置外部控制运行接口和通讯连接,运行接口包括:IO运行 接口和安全回路接口。
通讯连接配置 1、在机器人试教器通过机器数据界面配置机器人名称
2、机器人IP地址设置
27th August 2014
88
机器人返回原点控制(HMI操作按钮) PLC给机器人的斜坡停止请求 默认填写“0”
27th August 2014
24 24
六、PLC程序-机器人控制功能块配置
机器人自动启动使能条件 机器人报警和线体报警反馈
27th August 2014
机器人急停安全回路控制 机器人区域安全 安全回路控制
25 25
接口信号说明:
PLC >> KRC4 PGNO_TYPE- 程序号类型 此变量确定了以何种格式来读取PLC传送的程序编号,读取的格式有:二进制数值、 BCD 值、 “N 选 1” ,我们常用的是以 BCD 值(二进制)读取PLC程序号。 PGNO_LENGTH- 程序号长度 此变量确定了上级控制系统传送的程序编号的位宽。
27th August 2014
机器人循环自动启动运行条件
21 21
六、PLC程序-机器人控制功能块配置
生产线启动机器人的外部启动条件 生产线停止机器人的外部停止条件 该信号常规为“1” 机器人全部工作结束反馈信号
27th August 2014
机器人循环自动启动运行条件
22 22
六、PLC程序-机器人控制功能块配置
PGNO_PARITY- 程序号的奇偶位 PLC系统传递奇偶位的输入端。 PGNO_VALID- 程序号有效 PLC系统传送读取程序号指令的输入端。 PGNO_VALID- 程序号有效 EXT_START- 外部启动设定了该输入端后,输入 / 输出接口激活时将启动或继续一个程序 (一般为 CELL.SRC),该信号是个脉冲上升沿。 MOVE_ENABLE- 允许运行 该信号通过PLC的外部控制运行安全和报警联锁 对机器人驱动器使能控制。 CONF_MESS- 确认信息提示 通过给该信号使能,当故障原因排除后,PLC将确认机器人的故障信息。 DRIVES_ON- 驱动装置接通 通过该信号给机器人伺服驱动上伺服电,该信号触发至少持续20 毫秒的上升沿脉冲,直到驱动使能上了反馈回来去断开该输出控制。 DRIVES_OFF- 驱动装置关闭 该信号在安全回路、接口正常时为常”1”信号,PLC端触发了会关断机器人驱动装置,该信号触发至少持续20 毫秒的下降沿脉冲。
五、机器人程序配置
机器人与PLC 的IO信号配置完成并且启动时序也清楚了,我们现在开始需要编写机器人启动调用 引导程序(即Cell程序)和PLC外部自动控制程序:
27th August 2014
初始化 检查是否在原点
机器人回原点轨迹
调用1号程序
等待PLC程序启动信号
调用2号程序
调用3号程序
17 17
Automobile Production Solution
Step7与KUKA机器人外部自动启动 配置总结
汽车工业设备专家 Auto Industry Equipment Specialist
框架内容
技术经验总结 标准化总结 后续改造注意事项
27th August 2014
11
技术经验总结 硬件图纸设计/选型 软件设计/调试 机器人示教调试 电气安装
27th August 2014
66
一、接口信号定义说明
接口信号说明:
KRC4 >> PLC ALARM_STOP- 紧急停止 该信号在机器人自身急停和外部急停下触发时,会发出一个报警停机控制信号。 USER_SAF- 操作人员防护装置 / 防护门 该信号在外部自动模式防护装置(如 安全门、卷帘门)被触犯的时机器人会发出一个用户安全停止控制信号。 PERI_RDY- 驱动装置准备就绪 通过设定此输出信号,机器人控制系统通知PLC控制系统机器人驱动装置已接通。 STOPMESS- 停止信息 该输出信号由机器人控制系统来设定,以向PLC显示出现了一条要求停住(Hold)机器人的信息提示。 (例如:紧急停止按键、运行开通或操作人员防护装置)。 I_O_ACTCONF- 外部自动运行激活 选择了外部自动运行这一运行方式并且输入端 $I_O_ACT 为 TRUE (默认为 $IN[1025])后,输出端为 TRUE,该信号需要配置成外部IO信号。 PRO_ACT- 程序激活 / 正在运行 当机器人程序启动运行后,始终给该输出端赋值。 PGNO_REQ- 程序号问询 该信号是机器人发出对PLC程序号的请求。 APPL_RUN- 应用程序在运行中 该信号是机器人发出告知PLC应用程序已经被执行。 IN_HOME- 机器人位于起始位置 (HOME) 该输出信号告知PLC,机器人正位于其起始位置 (HOME)。 ON_PATH- 机器人位于轨迹上 只要机器人位于编程设定的轨迹上,此输出信号即被赋值。
27th August 2014
44
一、接口信号定义说明
配置外部PLC与机器人自动启动信号之前,我们需要先了解PLC与机器人有哪些接口信号,这些信 号都有哪些作用,接口信号的控制原理。
27th August 2014
外部自动运行接口IO信号概览
55
一、接口信号定义说明
通过外部PLC对机器人自动运行进程进行控制,其控制原理是:外部PLC通过外部自动运行接口向 机器人控制系统发出机器人进程的相关信号(如:运行许可、故障确认、程序启动等),机器人控制 系统向外部PLC系统发送有关运行状态和故障状态的信息。
下面讲述如何配置“#Robot-KUKA”标准功能块来进行外部自动启动机器人控制。
27th August 2014
18 18
六、PLC程序-机器人控制功能块配置
27th August 2014
填写线体和工位DB数据块,主要提供线体和工位 模式控制信号
配置HMI 控制地址信号 配置HMI 状态可视化地址信号 配置机器人报警 DB地址 配置PLC与机器人交互IO的起始地址(此处比较关键) 配置机器人在HMI画面的编号和位置