2.4框图化简及梅逊公式
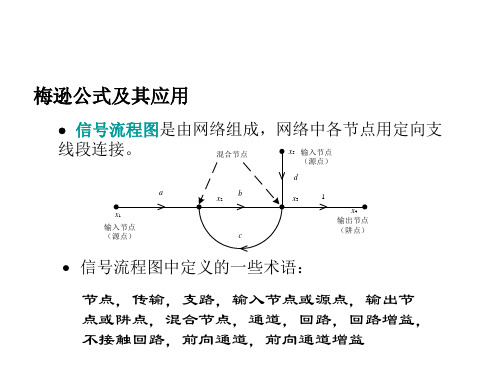
梅逊公式
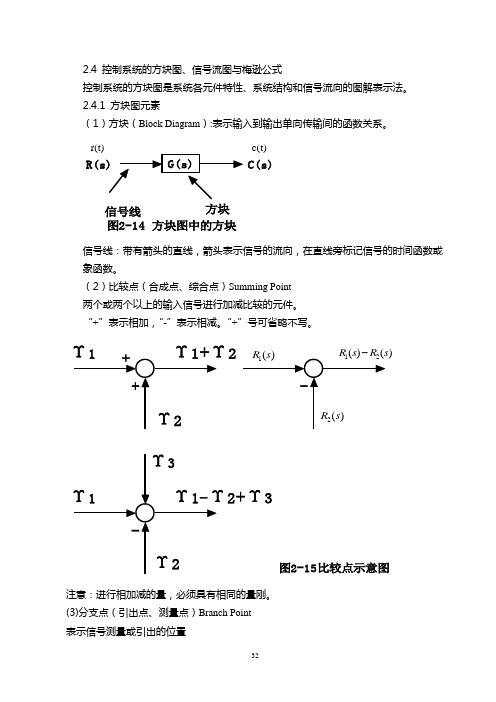
2.4 控制系统的方块图、信号流图与梅逊公式控制系统的方块图是系统各元件特性、系统结构和信号流向的图解表示法。
2.4.1 方块图元素(1)方块(Block Diagram ):表示输入到输出单向传输间的函数关系。
C(s)图2-14 方块图中的方块信号线方块r(t)c(t)信号线:带有箭头的直线,箭头表示信号的流向,在直线旁标记信号的时间函数或象函数。
(2)比较点(合成点、综合点)Summing Point 两个或两个以上的输入信号进行加减比较的元件。
“+”表示相加,“-”表示相减。
“+”号可省略不写。
2)2+Υ3图2-15比较点示意图注意:进行相加减的量,必须具有相同的量刚。
(3)分支点(引出点、测量点)Branch Point 表示信号测量或引出的位置图2-16分支点示意图注意:同一位置引出的信号大小和性质完全一样。
2.4.2 几个基本概念及术语R(s)N(s)打开反馈图2-17 反馈控制系统方块图(1) 前向通路传递函数 假设N(s)=0打开反馈后,输出C(s)与R(s)之比。
在图中等价于C(s)与误差E(s)之比。
)()()()()(21s G s G s G s E s C == (2) 反馈回路传递函数 Feedforward Transfer Function 假设N(s)=0 主反馈信号B(s)与输出信号C(s)之比。
)()()(s H s C s B = (3) 开环传递函数 Open-loop Transfer Function 假设N(s)=0 主反馈信号B(s)与误差信号E(s)之比。
)()()()()()()(21s H s G s H s G s G s E s B == (4) 闭环传递函数 Closed-loop Transfer Function 假设N(s)=0 输出信号C(s)与输入信号R(s)之比。
)()(1)()()(1)()()()(21s G s H s G s G s H s G s G s R s C +=+= 推导:因为)()]()()([)()()(s G s H s C s R s G s E s C -== 右边移过来整理得)()(1)()()(s G s H s G s R s C += 即开环传递函数前向通路传递函数+=+=1)()(1)()()(s G s H s G s R s C **(5) 误差传递函数 假设N(s)=0 误差信号E(s)与输入信号R(s)之比。
框图化简、梅逊公式习题
试应用梅森公式求取下图所示方框图的传递函数。
H 4(s)
R(s)
G1(s)
G 2(s) G 3(s) G 4(s)
C(s)
-
H 3(s)
-
+
H 2(s)
H 1(s)
解. 本题信号流图为 R( s ) 1 G1
G2
-H4 -H3
G3
G4
1
C (s)
-1
-H2
-H1
L3 G1G2G3G4 H1 L4 G3G4 H 4 1 ( L1 L2 L3 L4 )
R
G4 E G1 H1
G2
H1H 2
G3 C H2
梅森公式
前向通道有二,分别为: P 1 G 1G2G3 , P 2 G3G4
回路有三,分别为: G1H1 ,G3 H 2 ,G1G2G3 H1H 2 有两个不接触回路,所以:
C (s) 求 : R(s)
R
G4 E G1 H1
框图化简、梅逊公式习题
A
B C
求下列由弹簧-质量-阻尼器组成的机械系统传递函数。
m
k
f
(a)
(b)
例 绘制如图所示 RC 无源网络的结构图
解 将无源网络视为一个系 统,组成网络的元件就对应于系 统的元部件。应用复阻抗概念, 根据基尔霍夫定律写出以下方程:
RC无源网络
按照这些方程可分别绘制相 应元件的方框图如图(a) - (d)所 示。然后用信号线按信号流向 依次将各方框连接起来,便得 到无源网络的结构图,见图(e).
系统结构图及等效变换梅森公式

第四节 控制系统的结构图及其等效变换
例 画出图所示电路的动态结构图。
R1
+
U1(s)
R2
ur
-
i1
C1
i1-i2
i2
C2
+
uc
-
解:
Ur(s) _
U1(s)
2(s) I1(s) I_ U1(s) 1 1 C1S _ R1
1 R2
I2(s)
1 C2S
UC(s)
UC(s)
第四节 控制系统的结构图及其等效变换
不是串联! 也不是串联! C1(s)=R(s)G1(s)
C(s)=C1(s)G2(s) =R(s)G(s)1G2(s) C(s) =G (s)G (s) 等效 G(s)= R 2 (s ) 1 n G(s) =ΠGi (s) n个环节串联 i=1
第四节 控制系统的结构图及其等效变换
(2) 并联
两个环节的并联等效变换:
第四节 控制系统的结构图及其等效变换
(4)综合点和引出点的移动
1) 综合点之间或引出点之间的位置交换
综合点之间交换: 不改变数学关系 引出点之间的交换: b 不改变数学关系
a
±
c b a aa b c
aa ± cb ± bc ± ± ± a a a
综合点与引出点之间不能交换!
第四节 控制系统的结构图及其等效变换
U ( s ) – U ( s ) r c 系统动态结构图由四种基本符号构成: Ur(s)=RI(s)+Uc(s) =I(s)
第四节 控制系统的结构图及其等效变换
绘制动态结构图的一般步骤:
(1)确定系统中各元件或环节的传递函数。 (2)绘出各环节的方框,方框中标出其传 递函数、输入量和输出量。 (3)根据信号在系统中的流向,依次将各 方框连接起来。
第二章 传递函数-梅逊公式
2.3 传递函数与系统动态结构图
2.3.1 传递函数的定义
设系统的标准微分方程为
an
dnc(t) dt n
a n1
dn1c(t) dt n 1
……
a1
dc(t) dt
a0c(t)
bm
dmr(t) dt m
bm1
d m 1r ( t ) dt m1
……
b1
dr(t) dt
点
上图所示的是
G(s)
(s
(s 1)(s 2) 3)(s 2 2s
2)
的零、极点分布图。
2.2 传递函数
比
比例环节(无惯性环节): c(t)=kr(t)
例
传递函数:G(S)=C(S)/R(S)=k
c(t)
环
阶跃响应:R(S)=1/S
r(t)
节
C(S)=kR(S)=k/S C(t)=k
0
方框图: R(S) k/s C(S)
3
传
递
积分调节器:
C
在A点列方程可得:
函 数
Ur(t)
R
i2
i1
A
Uc(t) i2=i1, i1=Uc(t)/R Uc(t)=1/C∫i2(t)dt=1/(RC)∫Uc(t)dt
设RC=T(积分时间常数),则有:Uc(t)=1/T∫Uc(t)dt
拉氏变换后为:Uc(S)=1/(TS)Uc(S)
5)传递函数具有正、负号(输入量和输出量的变化方向)。
6)传递函数的单位是输出量的单位与输入量的单位之比。
m
(s z j )
7)传递函数可以写成
G(s)
Kg
j1 n
控制工程(自动控制)第六课 梅逊公式及系统传递函数

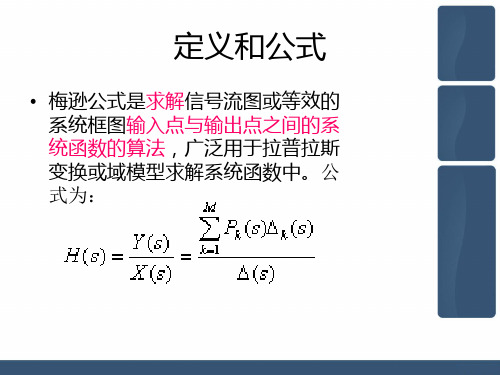
梅逊公式:
P
P
k 1 k
n
k
式中:P—系统总传递函数; n —前向通路总数; Pk—第k条前向通路的传递函数(通路增 益); —流图特征式;
1 La Lb Lc Ld Le L f
L —所有不同回路的传递函数之和;
a
L L —每两个互不接触回路传递函数乘积之和; L L L —每三个互不接触回路传递函数乘积之和; k—与第k条前向通路对应的余因子式,等于流
b c
d e f
图特征式中去掉与第k条前向通路接触的所有回路 的回路增益后的余项式。
注意:
1. 结构图与信号流图的转换。 方块与增益; 信号引出点、相加点与节点; 信号线与通道。 2.信号流图的回路和前向通道。 回路支数和不接触回路 前向通道确定
3.
信号流图的节点的合并
五、 闭环系统的传递函数
(1)时域测定法:施加阶跃信号,绘制输出量的响 应曲线; (2)频域测定法:施加不同频率的正弦波,测出输 入信号和输出信号之间的幅值比和相位差; (3)统计相关法:施加某种随机信号,根据被控对 象各参数的变化,采用统计相关法确定动态特性。
要求:
掌握控制系统数学模型――传递函数的表示方法
习题:
简明教程 2-14 (第73页 2-20 )
名词术语:
(1)源节点(输入节点):只有输出没有输入,一 般代表系统的输入变量。 (2)阱节点(输出节点):只有输入没有输出,一 般代表系统的输出变量。
(3)混合节点:既有输入又有输出的节点。 (4)前向通路:信号从输入节点到输出节点的传递 中,每个节点只通过一次的通路。 前向通路总增益:前向通路上各支路增益的乘 积,一般用pk表示。 (5)回路:起点与终点在同一节点,且信号通过每 一节点不多于一次的闭合通路。 回路增益:回路中所有支路增益的乘积,用La 表示。 (6)不接触回路:回路之间没有公共节点。
梅逊公式简单讲解
• 前向通路—从输入节点到输出节点的通路。前向通路中通过任何节点 不多于一次。
• 开通路—如果通路与任一节点相遇不多于一次,则称为开通路。
• 闭通路(回路或环)—如果通路的终点就是通路的起点,而且与其余 节点相遇不多于一次,则称为闭通路、回路、环路或简称为环。
• La —所有不同回路的增益之和
• Lb Lc —所有两两互不接触回路的增益乘积之和
• Ld Le Lf —所有三个都互不接触回路的增益乘积之和
• k —在Δ中,将与第k条前向通路相接触的回路所在项去掉后 余下的部分
术语解释
• 节点—表示系统中的变量或信号的点称为节点。 • 支路—连接两节点间的有向线段称为支路。支路增益就是两节点间的增益。 • 输入节点(源点)—仅有输出支路的节点称为输入节点,一般为系统的输入。 • 输出节点(阱点)—仅有输入支路的节点称为输出节点,一般为系统的输出。 • 混合节点—既有输入支路又有输出支路的节点称为混合节点。
• Ld Le Lf 所有三个都互不接触回路的增益乘积之和
• k —在Δ中,将与第k条前向通路相接触的回路所在项去掉后
余下的部分 • 通路—从任一节点出发沿着支路箭头方向连续地穿过各相连支
路到达另一节点的路径称为通路
例2 求Cce
Make Presentation much more fun
• 不接触环路—环路之间没有公共节点。
• 前向通路—从输入节点到输出节点的通路。前向通路中通过任 何节点不多于一次。
• Gk —从输入节点到输出节点的第k条前向通路增益
• Δ —特征式 且 1 La Lb Lc Ld LeL f
梅逊公式及其应用
P2 kgi 2 1 cd
• 将以上结果代入式公式,可得总传输
P
P P
11
22
1L L L L L L
a
bc
de f
1
2
3
acegi kgi(1 cd )
1 (ab cd ef gh ij kfdb) (abef abgh abij cdgh cdij efij kfdbij) abefij
=每两个互不接触回路增益乘积之和
2
L LL de f
=每三个互不接触回路增益乘积之和
3
Δk=信号流图中除去与第k条前向通道Pk相接触的支路和节点后余下的信 号流图的特征式,称为Pk的余因式。
例2-4 将图所示的系统方块图化为信号流程图并
将其简化。求系统传递函数
C(s)
R(s)
H2
R
+- ++
G1
+-
x7 C(s) 图2-13 信号流程图
解:• 此系统有六个回环,即ab、cd、ef、ij和kfdb,因此 L ab cd ef gh ij kfdb
a 1
• 两个互不接触的回环有七种组合,即abef、abgh、 abij、cdgh、cdij、efij及kfdbij,所以
L L abef abgh abij cdgh cdij efij kfdbij bc 2
G2
C G3
H1
图2-11 多回路系统
解:• 首先将图2-11方块图化为图2-12的信号流程图
-H2
1 R( s)
1
Байду номын сангаасG1
G2
G3
H1 -1
1
C( s)
(第04讲) 第二章 方框图与梅逊公式
3
(3)引出点(分支点、测量点)Branch Point 表示信号测量或引出的位置
R(s)
G1 (s)
P(s) G2 (s)
C(s)
P(s)
图2-20 引出点示意图
注意:同一位置引出的信号 大小和性质完全一样。
06-7-20
控制系统系统的动态数学模型
4
2.5.2 方块图的简化——等效变换
为了由系统的方块图方便地写出它的传递函数,通常需要 对方块图进行等效变换。方块图的等效变换必须遵守一个原则, 即变换前后各变量之间的传递函数保持不变。在控制系统中, 任何复杂系统主要由各个环节的方块经串联、并联和反馈三种 基本形式连接而成。三种基本形式的等效法则一定要掌握。 (1)串联连接
06-7-20 控制系统系统的动态数学模型 9
B( s ) H ( s ) X o ( s ) E ( s ) X i ( s ) B( s ) X i ( s ) H ( s ) X o ( s ) X o (s) G(s) E (s) G(s) [ X i (s) H (s) X o (s)]
X o ( s) G( s) X i (s) 1 G( s) H ( s)
对于具有负反馈环节的闭环系统的传递函数,分子是 前向通道的传递函数,分母是1加上前向通道的传递函数与 反馈通道的传递函数的乘积。 同理,对于具有正反馈环节的闭环系统的传递函数,分 子是前向通道的传递函数,分母是1减前向通道的传递函数 与反馈通道的传递函数的乘积。
17
R1 Ur (s)
1
C2 s
1 R2 1 C2 s
2
-
1 R1
1 C1s
Uc (s)
简化提示: •引出点A后移
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C(s)
有1组三个互不接触回路: L3 abefij
不存在四个互不接触回路: L4 0
1 L1 L2 L3
k 第k个前向通道的余子式;其值为 中除去与第k个前
向通道接触的回路后的剩余部分;
1 1 L1 L2 L3 ... 1
R(S ) E (S )
G1 G2
C (S )
R(S ) 1 E (S ) G1 C (S ) 1 C (S )
G2
信号流图是由定向线段(支路)将一些节点(变量)连接起来 组成的。支路上的传递函数称为支路增益
[几个术语]:
输入节点(源点):只有输出支路的 节点。如: R,N。
R
1
N 1 E P G Q G1 2
补充例题1
g
h b
R(s ) 1
a
c
d
1
2
3
i
4
5
l
e j6
7f
k
1 C (s )
8
9
m
Байду номын сангаас
补充例题2
R(s )
G1
1 1
G2
C (s )
3) 反馈联接:
R(s ) E (s)
G (s )
C (s )
H (s )
称为闭环传递函数
C ( s) G( s) ( s ) R( s ) 1 G ( s ) H ( s )
H (s)G2 (s)
①
R(s)
G1 ( s)
G2 ( s)
-
G3 ( s)
H ( s)G2 ( s)
C (s )
②
R(s)
G1 ( s)G2 ( s) G4 ( s)
G3 ( s ) 1 G2 ( s )G3 ( s ) H ( s )
C (s )
G3 ( s )(G1 ( s )G2 ( s ) G4 ( s )) G( s ) 1 G2 ( s )G3 ( s ) H ( s )
[例2-15]系统结构图如下,求传递函数 G ( s)
C (s) 。 R( s)
G5
R(s )
G1
G2
G3 G6 G7
G4
C (s )
补充例题
R (s )
G1
G2
Y (s )
G3
G4
G5
补充例题2
R(s )
G1
1 1
G2
C (s )
五 信号流图及梅逊公式
1 信号流图
本次课程作业
2-28(c)、(d) 2-31(b) 2-33
3 框图变换法则(化简) (等效原则)
1) 比较点交换
A B
A B
D
C
A
C
A C
D
B
2) 比较点分解
C
A B
3) 串联环节位置交换
D
A B
A B
D
C
A
G1
G2
B
A
G2
G1
B
4) 比较点前移 A
G
C
A
B
G
G G G G
G
E ( s) 1 称为误差传递函数 G E ( s ) R( s ) 1 G ( s ) H ( s )
对于给定的系统,梅逊公式中的特征式 是确定不变 的
补充题:P43 2-27
Y (s ) N (s )
R(s ) E (s )
B(s )
C (s )
G1 ( s)
H (s )
G2 ( s)
2 1 L1 L2 L3 ... 1 cd
1 2 P1 1 P2 2 acegi kgi (1 cd ) T Pk k k 1 1 L1 L2 L3 1 L1 L2 L3
A
G1
B
G2
C
A
G1
B
G2
C
B
C (s) G( s) 。 R( s)
B
[例]系统结构图如下,求传递函数
G4 (s)
R(s)
G1 ( s)
-
G2 (s)
G3 ( s)
C (s )
H (s)
比较点移动
[解]:结构图等效变换如下:
G4 (s)
R(s)
G1 ( s ) G4 ( s)
G2 (s)
-
C (s ) G3 (s)
求:GYR ( s ) Y ( s ) 和 GYN ( s ) Y ( s )
R( s )
N ( s)
补充例题
G4
R(s )
A
G1 H1
G2
G3
H2
C (s )
例2-17: R(s ) 1
a
x1
b
c e
d
g
i
1
x0
x2
x3
f
x4
h
x5
j
x6
C(s) x7
式中: 从输入节点至输出节点的总传输(即总传递函数); T
n 从输入节点到输出节点的前向通路总数; n 2
Pk 第k个前向通路的总传输;
P1 acegi
P2 kgi
1 n T Pk k k 1 R(s ) 1
H
1
C
输出节点(阱点):只有输入支路的 节点。如: C
传 输:两个节点之间的增益叫传输
混合节点:既有输入支路又有输
R 出支路的节点。如:E,P,Q 。 1
N 1 E P G Q G1 2
H
1
C
通路:沿支路箭头方向穿过 各个相连支路的路径
前向通路:从输入节点到输出节点的通路上,每个节点只通 过一次的通路称为前向通路,R->E->P->Q->C。 回 路:起点与终点重合且与任何节点相交不多于一次的通路。 如 E->P->Q->E。
回路增益:回路中各支路传递 函数的乘积,称为回路传递函 R(s) 2 数,也称为回路增益(传输) 1 1
e
a
3
g
4
b
互不接触回路:指相互间没有公共节点的回路。
f
c h
5
C(s) d
6
2 梅逊公式
用梅逊公式可不必简化信号流图而直接求得从输入节点到输出节 点之间的总传输。(即总传递函数)
1 n 其表达式为: T Pk k k 1 k
k
a
x1
b
c e
d
g
i
1
x0
x2
x3
f
x4
h
x5
j
x6
x7
C(s)
流图特征式;其计算公式为:
1 L1 L2 L3 ... (正负号间隔)
式中: L1 所有单独回路的传输之和; 有6个单独回路: L1 ab cd ef gh ij kfdb
L
2
所有两两互不接触回路传输乘积之和
有7组两两互不接触回路:
L2 abef abgh abij cdgh cdij efij kfdbij
k
三个互不接触回 路传输乘积之和
L
3
任何
R(s ) 1 x0 x1
a
b
c e
d
g
i
1
x2
x3
f
x4
h
x5
j
x6
x7
C
B
1/ G
C
A B
5) 比较点后移 A
C
B A 6) 引出点前移
C
B
G
C
B
A
7) 引出点后移
A
G
C
B
A
G
C
1/ G
B
8) 引出点前移越过比较点
B A
A
C
B
D
C
D
9) 化为单位并联
B
A
G1
C
A
G2
1 / G2
G1
C
G2
10) 化为单位反馈
A
G1 G2
C
A
1 / G2
G2
G1
C
11) 引出点交换