保角变换法
第6章保角变换-数学物理方法

f ( z0 ) 是经过映射Biblioteka f ( z ) 后通过点z0 的
的任何曲线C在 z0的伸缩率, 它与曲线C的形状及
方向无关. 所以这种映射又具有伸缩率的不变性.
5
2.共形映射(保角映射)
设函数w f ( z )在区域 D内解析, z0为 D内一点,
且 f ( z ) 0 , 那末映射w f ( z ) 在 z0 具有两个性 质: (1) 保角性; (2) 伸缩率不变性.
圆周的弧所围成的区域映射成一圆弧与一直线所 围成的区域. 3) 当二圆交点中的一个映射成无穷远点时, 这 二圆周的弧所围成的区域映成角形区域.
13
5. 几个初等函数所构成的映射
1) 幂函数 w z n ( n 2).
映射特点: 把以原点为顶点的角形域映射成以原
点为顶点的角形域, 但张角变成为原来的 n 倍.
故
b 1, a 1 i ,
(1 i ) z 1 ( i 1) z 1 所以 w 为所求. z (1 i ) z (1 i )
19
解3 利用典型区域映射公式
将所求映射设为 w e i
z z A , 1 z 1 z
保角变换
复变函数在几何意义上实际上相当于将平 面上的区域变成了平面上的另一个区域(简称 为映射). 应用:利用复变函数(特别是解析函数)所构 成的映射来实现复杂区域的简单化,这将给实 际问题的研究带来很大的方便.而利用保角变 换法求解数学物理方程边值问题.
1
本章内容: 1)保角射的概念; 2)分式线性映射和几个初等函数所构成的 映射; 3)典型实例描述保角映射的应用. 重点: 分式线性变换及其映射特点 难点:
保角变换法
R R i c ln 2 wm t 1 R 1 R
式中
1 wm w1 w2 , c 2
平板叶栅的一般绕流
为绕一个翼型的环量。
2.3.P9
(五)平板叶栅一般流动中环量的确定
环量的确定依据是弧立翼型绕流中的库塔 —— 恰普雷金条件。而栅中翼型尾缘点 B 必然 是后驻点,此外速度是一有限值。 经换算得
a) b)
2.3.P6
其复势为
t W 2 i R 1 R i ie ln ie ln R 1 R
流动奇点强度为
q1 q2 t sin
1 2 t cos
(三)平板叶栅纯环量绕流 b) 图示,栅前后只有 列线方向速度 w1、w2 。
可见 L L t b , ,具体 数值见图示曲线。 由上述已解得的平板叶栅 流动,可以求解由任何翼型组 成的等价平面直列叶栅流动。
平板叶栅环量修正曲线
三、平面环列叶栅流动的解法
2.3.P11
设图示环列叶栅由 n 个翼型组成,流动自中心 向外。可见,只要确定一个扇形区域内的流动即可。
平板叶栅无环量平行绕流
2
2.3.P4
q t cos
t sin
Z 平面复势
W z zei
表示速度为 1 的均匀流复势。 变换为 平面为 R 处相应放置点源、点汇
q 和点涡 的绕圆流动。
其复势
t W 2 i R i 1 R e ln e ln R 1 R
变换为 平面绕单位圆流动,且有
R R i W ln 1 1 4 R R
《流体力学》课件 3.9 保角变换

d w dW d d z d d z
在无穷远处,有:
d w d z
dW d
d dz
考虑到
dW d
kV
,
d dz
1 k
,有:
dw dz
V
三、环量的确定
1. 补充条件
dw 有限的常数
dz zB 2. 环量的确定
dz
d
E
0
dw 有限常数
dz zB
dw
d
E
w1 z
Q
2
lnz
i
h
Q
2
lnz
i
h
Q ln z2 h2 2
wz
w1 z
w1
a2 z
wz
Q
2
ln z2
a4 z2
h2
a4 h2
dz
d
k
;(其中:
k
是正的实数)
(根据黎曼定理这样的函数存在且是唯一的)
W
kV
w
z
kV R
kV
2
2 i
F z
ln
kV
F z
R
2
F z
ln
2 i
F
z
证明:1. 因W 是在 K D 上连续且在 D 内解析的函数, Fz是在 C D 上连续且在 D 内解析的函数。于是,根据复合函数的性质 wz W F z
一、保角变换的概念
w f z
V f lin w f ei Δz0 z
w wei f eiz f z ei
12
1 2
2 1` 2 1`
黎曼定理:
任何一个单连通区域必可通过某个保角变换 变为另一个任意给定的单连通区域。
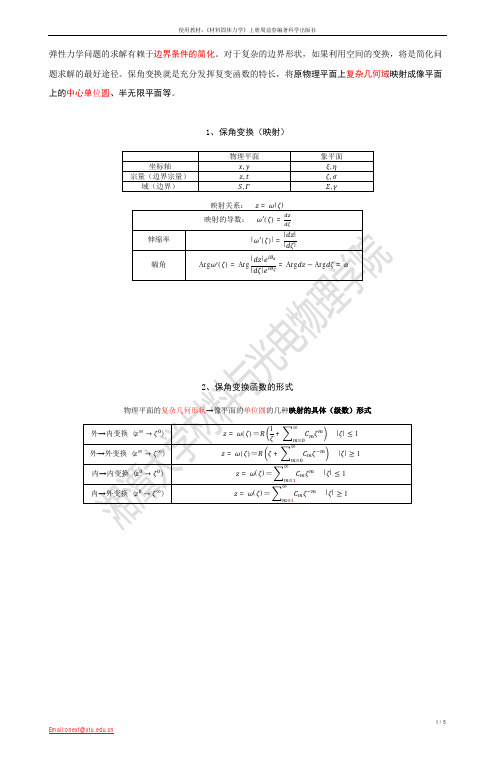
144《高等渗流力学》—保角变换及应用

定义:平面 z = x + iy 上给出某个流动其复势是F ( z ) ,引 入新复变函数 w = u + iv
两者间关系: z = z ( w) 或则 w = w( z )
z 实部和虚部关系: ( w) = z (u + iv ) = x (u , v) + iy (u , v ) x = x (u , v ), y = y (u , v ) …………….....(1)
⎛ R1 ⎞ Re > R1 , m ≥ 5 时 ⎜ ⎟ ⎝ Re ⎠
<< 1
2π ( Φ e − Φ w ) q= R R m ln e + ln 1 R1 mrw
14
保角变换及应用
例五:
取变换: w = 直线无限井列的变换。
ρe ⋅ e
iπ z a
则
w = ρe ⋅ e
θ= πx
a
iπ ( x + iy ) a
上式是长轴为 a ,短轴为b的椭圆方程,给定一个 ρ 值,z平面上 给定一条等势线(圆)。因此,上式为z平面等势线方程。另 外,由于 a 2 − b 2 = c 2 ,故Z平面上所有等式椭圆共焦,焦距为c。 x2 y2 a 2 − b2 − 2 2 = =1 2 2 2 c cos θ c sin θ c W平面上给定一v值,相当于给定一流线,故上式为Z平面的 流线方程。
dL
dφ vn = − —— 法线渗流速度; dn
dz dn = dv dw
5
保角变换及应用
dz dL = dλ 和 dw
例一:
∫
dφ dL = dn
∫
dφ dz dφ dλ = ∫ dλ dz dw dv dv dw
水平井产能方程 保角变换

水平井产能方程保角变换一、水平井产能方程水平井产能方程是指描述水平井产能与井筒流体动力学特性之间关系的方程。
水平井产能方程可以用来预测水平井的产能,优化井筒设计和生产操作,提高油田开发效率。
水平井产能方程的基本形式为:Q = C ×A ×ΔP其中,Q表示水平井的产量,C表示产能系数,A表示有效产能截面积,ΔP表示井底流压与油藏压力差。
产能系数C是一个重要的参数,它反映了井筒内部的摩阻和油藏的渗流特性。
产能系数的大小与井筒直径、井段长度、井段内部摩阻、油藏渗透率等因素有关。
有效产能截面积A是指井段内部流体能够通过的有效面积。
在水平井中,有效产能截面积随着井段长度的增加而增加。
井底流压与油藏压力差ΔP是水平井产能的主要驱动力,它反映了油藏的产能和井筒内部流体动力学特性。
二、保角变换保角变换是一种常用的数学工具,它可以将一个复平面上的区域映射到另一个复平面上的区域,保持角度不变。
在水平井产能方程中,保角变换可以用来解决井筒内部流体动力学特性的计算问题。
保角变换的基本思想是将复平面上的点z映射到另一个复平面上的点w,使得z 和w之间的角度保持不变。
具体来说,保角变换可以用下面的公式表示:w = f(z)其中,f(z)是一个解析函数,它可以将z映射到w上。
保角变换的关键在于找到一个合适的解析函数f(z),使得它能够满足保角变换的要求。
在水平井产能方程中,保角变换可以用来将井筒内部流体动力学特性的计算问题转化为一个更简单的问题。
具体来说,可以将井筒内部流体动力学特性的计算问题映射到一个更简单的复平面上,然后利用保角变换的性质来求解。
总之,水平井产能方程和保角变换是石油工程中非常重要的数学工具,它们可以帮助工程师们更好地理解井筒内部流体动力学特性,优化井筒设计和生产操作,提高油田开发效率。
保角变换-数学物理方法
在处理波动方程中的应用
波动方程是描述波动现象的基本方程,如声波、光波等。保 角变换在处理波动方程中具有广泛应用。
通过保角变换,可以将波动方程转化为更容易求解的形式, 如分离变量法或积分变换法等。这有助于我们更深入地理解 波动现象的本质,并为实际工程问题提供解决方案。
在研究几何光学问题中的应用
几何光学是研究光线传播规律的科学。保角变换在几何光 学中有重要应用,尤其是在处理光线折射和反射问题时。
02
常见的保角变换方法
极坐标变换
01
02
03
极坐标变换是一种常见 的保角变换方法,它将 平面上的点从直角坐标
系变换到极坐标系。
极坐标变换公式为:$x = rcostheta, y =
rsintheta$,其中$r$是 点到原点的距离,
$theta$是点与x轴的夹角。
极坐标变换在处理与圆 和极坐标相关的问题时 非常有用,例如电场、 磁场和流体力学中的问
发展高维空间的保角变换
将保角变换从二维平面扩展到高维空间,探索其在高维几何处理和 计算几何等领域的应用。
保角变换的算法优化与改进
算法效率提升
针对现有保角变换算法的瓶颈,研究优化算法结构和计算 过程,提高算法执行效率。
并行化与分布式计算
利用并行化和分布式计算技术,实现大规模保角变换任务 的快速处理和实时响应。
弹性力学中的保角变换在结构分析、地震工程和材料科学等领
03
域有广泛应用。
03
保角变换在数学物理问题 中的应用
在求解偏微分方程中的应用
偏微分方程是描述物理现象的重要工具,而保角变换可以用来求解某些偏微分方 程。通过保角变换,可以将复杂的偏微分方程转化为更容易求解的形式,从而得 到物理现象的解。
保角变换

dw b 容易验证:分式线性映射的逆映射 z , cw a (a)(d ) bc 0 也是分式线性映射,因此,我们通常也把分
式线性映射称为双线性映射.
dw ad bc 由于分式线性映射的导数 0 ,因而, 2 dz cz d
分式线性映射是保角映射. 容易验证 : 两个分式线性映射的复合仍是一个分式线性 映射. 事实上,设
定理 6.2.4 在 z 平面和 w 平面上任意给定三个相异的点 z1 ,
az b 【证明】 设 w cz d w k k 1, 2,3 ,即
2, 3 1,
wk
于是
az b azk b z zk ad bc w wk cz d czk d cz d czk d
azk b czk d
2, 3 , k 1,
k 1, 2
az3 b azk b z3 zk ad bc w3 w k cz3 d czk d cz3 d czk d
由此可得
2 k 1,
w w1 w 3 w 2 z z1 z3 z2 w w 2 w 3 w1 z z2 z3 z1
6.1 保角映射的概念
我们在讨论解析函数导数的几何意义时已经提到了保角映射这 一概念.
6.1.1 保角映射的概念
定义 6.1.1 为保角映射. 凡具有保角性(角度相同,旋转方向相同)和伸缩率不变性的映 射称为第一类保角映射. 凡具有保角性(角度相同但旋转方向相反 )和伸缩率不变性的映射 称为第二类保角映射. 保角映射 凡具有保角性和伸缩率不变性的映射称
az b 设w ,可以把它化为 cz d ad 1 a (6.2.1) w b c cz d c 1 B ( A , B 为复常数) 令 cz d , ,那么 w A .
4.6 保角变换解法
1
()
1
() ()
1
()
1
2πi
−
+ 2πi
− ( ) + 2πi
−
= 2πi
−
l ( )=∑
在圆外域是解析的
l 位于圆内域
l ( )在圆内域是解析的 l 位于圆内域
1()2πi−源自= (∞) = +
∞ =0
1
()
2πi
−
= ()
(
)
=
−
1 2πi
() ()
1
− ( ) + 2πi
−
上表中的 ( )和 ( )的表达式的右端第一项与变换函数 ( )(即孔的形状)有关,称几何项。第二项与孔边和远 方的外力有关,称为载荷项。
B. 复杂情况求数值解 方法 1
→ →
(如:上面 4 种级数形式的映射关系就没办法逆映射):
(1) 先把应力组合转到像空间,
⎧ + = 2 ( ) + ( ) = 4Re[ ( )]
⎪ − +2
= ( ) 2[ ̅ ( ) + ( )]
(5)
⎨
⎪ ⎩
2
[
+
]=
( )−
() ()
( )− ( )
并利用像平面中解得的 ( ), ( )求解应力和位移分量,即分别得到了 (ξ, η)~
接下来就可以利用 4.5 节介绍的复数级数方法,来求解单位圆域的 ( )和 ( )。我们只需要用将 平面 K-M 函数的 级数代入(2)式左边,并把右边已知外力也在 平面展开成 F 级数,比较左右两边的系数就可求解。
2/5
Email:onexf@
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.4.P8
如图示, ζ 平面上有
W (ζ
)=
c iα − iα e ζ e + ∞ ζ
2
则 z 平面上有
2 z z ze−iα + i 2sin α − − c2 W ( z) = ∞ 2 2
其驻点为
x A , B = m 2 c co s α
式 中 t = 2 y max
式中b 式中 —— 弦长
1.4.P13
对于 ζ 平面绕圆流动有复位势
a 2 iα iΓ ζ + m W (ζ ) = ∞ (ζ + m ) e − iα + e − ln a ζ + m 2π
可由此求得 W ( z )。 环量为 Γ = −4π
∞
c (1 + ε ) sin α
可以证明, 可以证明,W(z)的实部和虚部均满足拉普拉氏 的实部和虚部均满足拉普拉氏 方程。 方程。
1.4.P3
(二)复速度在保角变换时的变化
ζ 平面上的复速度
dW dW dz dz V (ζ ) = = = V ( z) dζ dz d ζ dζ
d z iarg ta n ( d z 或 V (ζ ) = e dζ
1.4.P2
(一)复位势在保角变换中的变化
ζ 平面具有边 界
的平面势流, Cζ 的平面势流,其
W (ζ ) = ϕ (ξ ,η ) + iψ (ξ ,η )
可通过复变函数
z = f (ζ )
变换为 z 平面上,具有边界 Cz 的 平面上,
W ( z ) = ϕ ( x, y ) + iψ ( x, y )
ζ 平面上圆心在虚轴
上,距原点 m
c,
且过 ζ = ±c 两点的圆, 两点的圆, 可变换为 z 平面上的 圆弧,如图,方程为 圆弧,如图,
c c2 x2 + y + = c2 4 + 2 m m
2 2
1.4.P15
弦长为 b=4c ,顶点 f=2m。 。 在 z 平面上,以 b 和 f 表示其方程为 平面上,
W (ζ ) = (ζ e − iα + ∞ a2 e iα )
ζ
1.4.P6
可变换得 z 平面上绕流复位势为
2 z z 2 −iα a iα −iα W(z) = ∞ ze + e − e − − c2 c 2 2
2
平板升力为 升力系数为
L = πρ
2
∞
b sin α
Cl = 2π sin α
1.4.P11
(四)对称翼型(儒可夫斯基舵)绕流 对称翼型(儒可夫斯基舵)
ζ
平面上,圆心在横轴上原点左面,离原点 平面上,圆心在横轴上原点左面,
m<<c ,过 ζ = +c 的圆 ,经变换后得 z 平面上 的对称翼型。 的对称翼型。
dζ )
V
(z )
若 ζ 平面上来流复速度为
V (ζ ) =
∞ζ
e
− iα ζ
则 z 平面上来流复速度为
dz V ( z )( )ζ → ∞ = dζ
∞
e
− iα ζ
1.4.P4
(三)流动奇点强度在保角变换中的变化 作保角变换时,二平面上的点涡、 作保角变换时,二平面上的点涡、点源强度有 关系
Γ z = Γζ
, y A,B = 0
1.4.P9
2、有环量绕流 有环量绕流
如图示为实际的有环量绕流。其环量为 示为实际的有环量绕流。
ζ
Γ = −4π
∞
c sin α
c sin α ln
平面上的复位势为
− iα c 2 iα W (ζ ) = ∞ ζ e + e + i 2 ζ
ζ
c
∞
1.4.P10
其后驻点为
X A, B c2 = ma + a cos α
YA,B
c2 = ma − sin α a
1.4.P7
(二)库塔 —— 恰布雷金假设 库塔 —— 恰布雷金假设:绕流过带尖锐后缘的 恰布雷金假设: 物体时,其后缘必定是后驻点。 物体时,其后缘必定是后驻点。 (三)平板绕流 1、无环量绕流 无环量绕流
1.4.P12
其参数方程为 曲线方程为
x = 2c cosν , y = 2cε (1 − cosν ) sinν
x x y = ±2cε 1 − 1 − 2c 2c
2
二式中
ν
—— 见图示
ε =m c
2
1
翼型表面方程也可记为
x x y = ±0.385t 1 − 2 1 − 2 b b
即奇点强度保持不变。 即奇点强度保持不变。 二、儒可夫斯基变换 变换函数
z = ζ + c2
q z = qζ
ζ
式中:c —— 正、实常数。 实常数。 式中:
1.4.P5
(一)变换特点 1)ζ 平面上无穷远点和原点都变换成 z 平面 上的无穷远点。 上的无穷远点。 2)ζ 平面上圆心在坐标原点,半径为 c 的圆 平面上圆心在坐标原点, 周变换成 z 平面上实轴上长为 4c 的线段。 的线段。 3)ζ 平面上圆心位于坐标原点,半径 a 的 平面上圆心位于坐标原点, a>c的 圆变换为 z 平面上长半轴为 平面上长半轴为a+c2/a(位于实轴 位于实轴), 位于实轴 的椭圆。 短半轴为 a-c2/a 的椭圆。 如来流成a角 图示),则 如来流成 角(图示),则 ζ 平面上绕流复位势 ),
b b
升力系数为 Cl = 2π 1 + 0.77 t sin α + 2 f
可见,增大翼型厚度和弯度与增大攻角一样,可 可见,增大翼型厚度和弯度与增大攻角一样, 使 Cl 增大,但应有限制。 增大,但应有限制。
1.4.P1
第四节 保角变换法、 儒可夫斯基变换
一、保角变换法求解平面势流 可以利用解析的复变函数 z = f (ζ ) 将 ζ 平面上
的圆域变换为 z 平面上的实用源自,如图。 平面上的实用域,y Z
η
Cz
ζ
Cζ
o
v∞z
x
o
ξ
αz
v∞ζ
αζ
复平面的保角变换
其流动可作相应变换以求解。 其流动可作相应变换以求解。
变换到 z 平面上环量为
Γ = −π
L = πρ
2
∞
b (1 + 0.77 t b ) sin α
得对称翼型上的升力
∞
b (1 + 0.77 t b ) sin α
1.4.P14
升力系数 Cl = 2π (1 + 0.77 t b ) sin α 与平板绕流相比, 增大了。 与平板绕流相比, Cl 增大了。 (五)圆弧翼型绕流
b2 b2 b2 2 y=− + −x 1 + 2 8f 4 16 f
在 ζ 平面上有 a2 iΓ ζ − im − iα iα W (ζ ) = ∞ (ζ − im ) e + e − ln ζ − im 2π a 可由此求取W(z)。其环量为 可由此求取 。
可得 z 平面上的复位势
2 z z c 2eiα 2 e−iα + W ( z) = ∞ + − c + 2 2 2 z 2 + ( z 2) − c 2
z z + − c2 2 2 i 2c sin α ln c
iΓ ζ − meiδ a2 W (ζ ) = ∞ (ζ − meiδ ) e −iα + eiα − ln iδ a ζ − me 2π
由此式可得W(z)。 由此式可得 。 其环量为
t 2f Γ = −π ∞b 1 + 0.77 sin α + b b
1.4.P17
此变换可看成是前述变换的叠加。 此变换可看成是前述变换的叠加。其曲线方程为
b b2 2 b2 2x 2x y= 1+ − x − ± 0.385t 1+ 1− 4 16 f 2 8f b b
2 2
1.4.P18
ζ 平面上的复位势为
Γ = −π
b sin d + 2 f ∞
(
b
)
1.4.P16
圆弧翼型升力为
2f L = πρ xb sin d + b
2
升力系数
2f Cl = 2π sin α + b
(六)儒可夫斯基翼型绕流 儒可夫斯基翼型绕流 图示 ζ 平面上圆心在二象限的圆,变换后得 z 平面上圆心在二象限的圆, 平面上的儒可夫斯基翼型。 平面上的儒可夫斯基翼型。