测井电缆绞车深度校正系统的设计与实现
测井液压绞车智能控制系统
测井液压绞车智能控制系统摘要:液压绞车是测井施工中必备的装置,液压绞车能够为测井提供垂直升降动力,辅助施工。
但在实际施工过程中,液压绞车操作人员需要随时对绞车的速度进行调整,所以绞车的稳定性难以保证,给施工带来了一定的安全隐患。
测井液压绞车智能控制系统,能够实现测井绞车的匀速升降,不仅提高了绞车升降的稳定性,同时也确保了施工的安全。
关键词:测井;液压绞车;智能控制系统前言液压绞车在现代工矿企业施工中被广泛使用,液压绞车在测井施工中,为升降井提供动力,测井施工的安全和效率多半是由液压绞车的性能决定的。
由于升降井时,深度会随着时间而变化,而绞车的滚筒半径也会受到深度变化的影响,电缆的线速度要通过人工调整才能达到相对的稳定性,而这种人工操作的误差又是不可避免的,所以电缆线速度难以恒定下来。
以往的测井施工中,绞车的操作人员成为了保证绞车稳定性的关键因素。
井筒的情况难以预测,运行随时可能受到阻碍,在这种情况下,考验的就是绞车操作人员的操控能力,如果精神不够集中,没有及时发现井筒情况,极易导致操作失误,使电缆无法正常运行,造成施工事故。
基于以上的不稳定因素,绞车的智能控制系统问世了。
绞车智能控制系统能够使绞车的各个构成部件全部实现智能化控制,它的工作原理是在将传感器安装在绞车的各个构成部件上,控制系统将传感器采集的信息进行处理和分析,计算出液压绞车的运行速率和电缆的线速度,真正实现智能化控制,保证绞车速度的稳定性,最终达到确保施工安全的目的。
1.液压传动的工作原理1.1液压系统的组成动力装置能够将机械能转化为压力能,从而为液压系统提供压力,推动整个液压系统进行工作[1]。
执行装置能够将压力能转化为机械能,并通过液压缸和液压马达,驱动工作部件运动;控制调节装置主要用来控制液压系统的液流的方向、液体压力和流量,通过压力阀、流量阀和方向阀等来实现.从而保证执行装置能够按计划工作。
辅助装置的辅助作用通过各种管接头、油管.油箱、过摅器和压力计等来实现.,从而确保液压系统运行的稳定性。
测井电缆深度记号标定新方法实现的研究与应用
测井电缆深度记号标定新方法实现的研究与应用一、研究背景测井电缆深度记号标定是油田勘探中非常重要的一项工作,其准确性直接影响到测井数据的可靠性和精度。
目前,传统的测井电缆深度记号标定方法存在着标定时间长、标定精度低等问题,因此需要寻找新的方法来提高标定效率和精度。
二、文献综述1.传统方法传统的测井电缆深度记号标定方法主要是通过在钻杆上安装深度计,并用手动或自动方式记录下电缆在不同深度处所对应的记号。
这种方法需要较长时间进行标定,并且存在着人为误差和机械误差等问题。
2.新方法近年来,随着计算机技术和信号处理技术的不断发展,新型测井电缆深度记号标定方法也得到了广泛关注。
例如,有学者提出了一种基于声波信号处理的测井电缆深度记号标定方法,该方法通过对声波信号进行分析处理,可以实现快速准确地进行电缆深度记号标定。
三、研究目的本研究旨在探究一种新的测井电缆深度记号标定方法,通过实验验证其在提高标定效率和精度方面的优势,并进一步应用于实际油田勘探中。
四、研究方法1.实验材料本次实验所采用的测井电缆为普通电缆,深度记号为每0.5m一个记号。
声波发射器采用50W功率的发射器。
2.实验步骤(1)将声波发射器固定在钻杆上,并将电缆固定在发射器下方;(2)通过计算机软件控制声波发射器发送声波信号,记录下信号传输时间;(3)根据信号传输时间计算出电缆所处深度,并记录下对应的记号;(4)重复以上步骤,直至完成所有深度记号标定。
3.实验结果分析经过多次实验测试,本研究所提出的测井电缆深度记号标定方法具有较高的准确性和稳定性。
与传统方法相比,该方法可以显著提高标定效率和精度。
五、应用前景本研究所提出的测井电缆深度记号标定方法具有广泛的应用前景。
该方法可以应用于各种类型的测井电缆,并且可以实现快速准确地进行深度记号标定。
此外,该方法还可以结合其他信号处理技术,进一步提高标定精度和效率。
六、结论本研究通过实验验证了一种新的测井电缆深度记号标定方法,该方法具有较高的准确性和稳定性,并且可以显著提高标定效率和精度。
测井绞车控制器电缆深度测量电路的改进
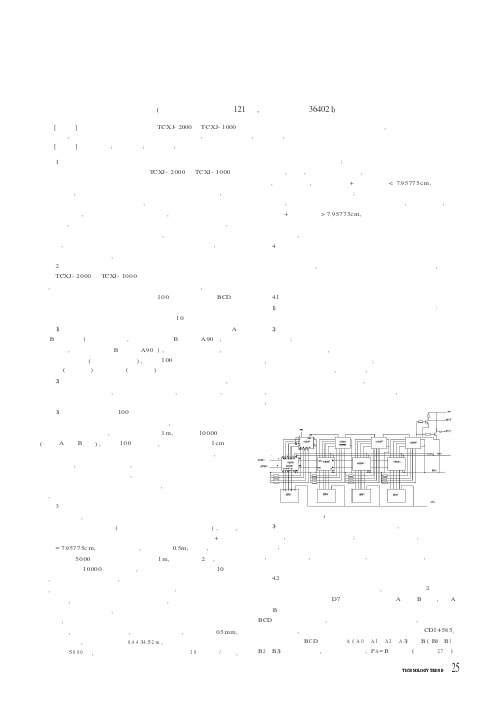
1 问题的提出 目前煤田数字测 井使 用的绞车有 TCXJ- 2 00 0 和 TCXJ- 1 0 00 型 两种绞车。绞车由机械部分、电缆、测井速度控制电路、深度测量电路 等部分组成, 实现了绞车恒速、自动控制测井。但在测井过程中, 由于 电缆、传动导向滑轮的长期使用磨损, 或者电缆受过较大拉力后电缆缆 径 发生 变化 等, 都使深度测 量产 生系 统误 差, 测量的深度 大于实际深 度。目前, 一般的解决办法是使用测井资料处理软件进行深度平差, 这 是以牺牲野外作业效率为代价的。笔者提出, 可以对原绞车深度测量电 路改进, 使用电路硬件实现在测井的同时边测井边平差的目的, 这样既 可以获得准确的测井深度, 又可以提高测井效率。 2 原绞车电缆深度测量电路 TCXJ- 2 0 00 和 TCXJ- 10 0 0 型绞 车的电缆深 度测量电路 是一样 的, 主要任务是完成电缆深度测量、显示、寄存三大任务, 并产生采样 间隔脉冲。它由电缆运行方向判别电路、1 0 0 分频电路、六位 BCD 码 计数器、六位拨码开关、六位井深寄存器、六位显示器、高四位预置停 车比较器、深度采样间隔电路、震荡器及电源等 1 0 部分电路组成。 1) 电缆运行方向判别电路的作用是将来自光电脉冲发生器的光 A、 光 B 脉冲信号 ( 当上提电缆时, 脉冲相位上光 B 超前光 A 90°, 当下 放电缆时, 脉冲相位上光 B 落后光 A9 0°) , 送到方向判别电路, 判断 出电缆运行方向 ( 电缆上提或下降) , 控制 1 00 分频器和计数电路进行 加计数 ( 下放电缆) 或减计数 ( 上提电缆) 。 2) 振荡器的作用是当不采用距离间隔采样而使用时间采样时, 由 振荡器送出时间采样脉冲, 供给分频和计数电路, 用以校验仪器, 它一 般不用于正常测井。 3) 井深测量电路。由 10 0 分频器、六位计数器、显示器、深度寄 存器等构成。电缆运行时要通过电缆导向轮后, 进入绞车滚筒。电缆导 向轮上安装 有光 电码盘, 使得电 缆每 运行 1 m, 要产生 10 0 00 个脉冲 ( 即光 A、光 B 脉冲) , 经过 1 0 0 分频器后, 对应电缆每运行 1 cm 有一 个脉冲信号。六位计数器的功能是对电缆的运行长度进行计数, 它使用 可逆计数器, 可以进行加减计数, 以对应电缆的上下运行。显示器由锁 存器、译码驱动器和数显管组成, 用以显示电缆的深度。深度寄存器的 作 用是 将所记录的电缆深度放在寄存器中, 将串行信号转化为并行信 号, 送到采集计算机进行数据采集。 3 测井深度误差产生的原因 我们知道, 测井绞车的机械部分由传动滑轮、排缆装置、卷筒等构 成。传动滑轮是一组滑轮 ( 一个主传 动轮、三个辅助传动轮) , 其中, 主轮通过齿带带动光电脉冲发生器产生深度脉冲。主轮的半径 + 电缆的 半径 = 7.9 57 7 5c m, 主轮每转一周, 电缆运行 0.5m, 同时, 光电脉冲 发生器发出 5 0 00 个深度脉冲。电缆运行 1 m, 主动轮转 2 周, 光电脉 冲发生器发出 1 0 00 0 个深度脉冲, 其对应关系是每毫 米产生 10 个深 度, 这对深度计数十分方便, 又有足够的精度。但同时也带来了新的问 题, 这些问题就是测井深度产生系统误差的原因: 第一, 轮通过齿带带动光电脉冲发生器, 齿带的松紧或每一个齿 的尺寸只要有微小的误差, 则光电脉冲发生器发出的脉冲就要产生较大 的误差; 第二, 轮的轮径 发生变化, 如主轮长期磨 损, 半径减小 0.5 mm, 主轮每转一周, 电缆运行只有 0 .4 4 34 5 2 m , 但光电脉冲发生器发出的 脉冲还是 5 0 0 0 个, 深度脉冲与深度的对应关系不是 1 0 个脉冲 / 毫米,
分析测井深度误差原因及自动化校深方法
分析测井深度误差原因及自动化校深方法在油气田的勘探和开发过程中,测井技术发挥着重要的作用,为油气资源的开发利用提供重要的指导和保障。
但在实际的操作中,因外界条件的限制,各种主客观因素的影响,在进行测井时常会出现或大或小的误差,严重的影响了油气资源的正常开发和利用。
找出误差出现的原因并探寻改正的方法,对油气井的正常工作会有很大的帮助。
标签:测井深度;误差原因;自动化校检油气的测井技术是随着油气井勘探开发而不断更新发展的,套前套后的、不同次的测井深度都会不同,产生误差。
这些误差会直接影响到射孔的质量,这一点在开发薄油气层时显得尤为重要。
对造成射孔深度误差的原因进行分析研究,并科学的制定并采取相应的措施将误差降到最小限度,就可以在此基础上更好地进行油气井开发和利用,确保油田正常生产。
1 测井深度误差产生的常见因素在测井时,不同次测井深度结果不相同,会出现不同的误差,引起误差出现的原因主要是以下几方面。
1.1 因测井电缆型号不完全相同及使用造成的疲劳程度不同而引起的误差。
不同厂家生产的不同批次的测井电缆因型号、粗细、材质等方面都有不同,在具体使用时使用频率也不一样,加之开始使用时间的不同,造成电缆的都有各自不同的疲劳度,测井电缆的伸缩变化也各不相同。
在使用这些电缆进行测井时,标准不统一,结果也会有差别。
这些测井电缆上的不同的原因就致使测井深度的结果出现了不同的误差。
1.2 测井电缆所受到张力的不同变化也会影响测井深度结果出现不同程度的误差。
在不同的时间段进行测井时,井眼内的地质状况、浓粘程度及下钻测深区域都有所变化,随着这些客观条件的变化,就是使用相同的电缆进行测井,这些测井电缆在不同时间、不同地质条件下受到的摩擦阻力和浮力都会出现不同的變化,这就让测井电缆进行测量时所受到的张力有了不一样的变化。
电缆所受张力的不同,测井结果自然就会出现不同了,误差也就随之产生了。
还可能因为对测井结果的不同需求,需要对测井电缆加装不同质量的检测仪器,加装了检测仪器的电缆的悬重就会出现变化,电缆所受张力也因此而改变,测井结果误差也就随之出现了。
测井仪绞车的工作原理及结构特点
测井仪绞车的工作原理及结构特点1、前言测井仪绞车是装载测井仪器和电缆绞车的专用石油工程车,可满足7000m以内的油、水、气井的测试工作,其结构高度集成化,抗干扰能力强,测井精度高,是油田找油、水、气井的理想设备。
随着测井技术的不断提高,常规组合测井、成像测井、随钻测井和工程测井、核磁共振测井等不同测井作业都对常规测井车的操作控制提出了更高的要求。
新开发的智能化测井仪绞车,可以通过智能化控制进行测试作业,使仪器的下放、调速、定位、测试、提升等一系列原来必须人为控制的操作,现在均可由仪器自动完成,不仅提高了测试数据的准确率,同时也提高了生产作业的效率。
2、工作原理智能化测井车是用于油田测井工艺的专用工程车。
它通过取力器从底盘变速箱/分动箱取力后,经传动轴传递给绞车的液压泵。
动力通过液压泵、液压马达及控制元件等组成的液压系统传递,再由液压马达带动绞车减速机进而驱动防磁滚筒转动,从而实现井下仪器的测试和回收。
测井施工时,PLC控制器的输入和输出端口与测井车上的电控泵、电控马达、手柄控制阀和电磁阀以及编码器、张力计等元件进行连接实现模拟信号和数字信号的输入输出信息反馈,通过智能操作系统对测井的速度、深度、张力等各项指标进行实时跟踪和自动控制。
3、结构特点智能化测井车主要由底盘、车厢(包括操作室和绞车室)、绞车总成、传动系统、电器系统、智能化操作系统、井下仪器舱及其他辅助部分构成。
3.1底盘该车选用梅赛德斯-奔驰MB ACTROS3331/6×4二类汽车底盘,发动机功率230kW。
3.2车厢车厢分为操作室和绞车室,整体采用钢骨架结构,后部为大圆弧状,卷帘覆盖,卷帘为双面涂聚胺脂胶的维纶布。
车厢整体外蒙皮为3mm铝合金板,操作室内装饰采用1.2mm不锈钢拉丝板,舱体六面壁聚胺脂发泡保温。
3.3绞车总成绞车总成主要包括滚筒、滚筒支架、滚筒制动装置等。
滚筒可缠绕7500m直径为11.8mm的电缆。
绞车最大提升力65kN,电缆起升速度30~8000m/h。
测井绞车深度与速度测量系统设计
Ke y wo r d s : L o g g i n g ; Op t i c a l e n c o d e r ;MC U
1 引 言
随着测井装备走向国际化 ,对测井绞车装备 的
化、 技 术 引进 、 设计 成熟 4个 阶段嘲 。 因此 , 如何 研 究
了提高控制精度 , 准确测量控制对象的位置是十分
重 要 的 。 目前 , 检测 位 置 的方法 有两 种 。一 种方 法
是使用位置传感器 ,将测量到的位移量 由变送器经
A / D转换 成数 字量 , 送 至 系统进 行 进一 步处 理 。 此 方 法 虽然 检测 精 度高 , 但在 多 路 、 长 距离 位 置监 控 系统 中, 由于 其 成本 昂贵 、 安装困难 , 因此并 不 适 用 。另
mi c r o c o n t r o l l e r c o u n t mo d u l e , s e i r a l o u t p u t mo d u l e , k e y b o a r d i n p u t mo d u l e a n d L ED d i s p l a y mo d u l e . T h i s p a p e r i n t r o d u c e s t h e c i r c u i t s c h e ma t i c s o f e a c h mo d u l e , nd a wr i t e s t h e s o f t wa r e p r o g r a m, d o e s s y s t e m d e b u g g i n g , a n d t h e n g a i n s a l o g g i n g w i n c h d e p t h a n d s p e e d me a s u r e me n t s y s t e m. Di s p l a y e d d e p t h r a n g e i s 9 9 9 . 9 9 me t e r s . Me a s u in r g d e p t h r e s o l u t i o n i s 1 mi l l i me t e r .T h e v e l o c i t y d i s p l a y r a n g e i s 9 9 . 9 9 me t e r s p e r s e c o n d .T h e v e l o c i t y r e s o l u t i o n i s 1
煤田测井绞车系统控制原理及使用探讨
煤田测井绞车系统控制原理及使用探讨发表时间:2018-09-10T09:45:54.063Z 来源:《基层建设》2018年第21期作者:吕琪[导读] 摘要:测井绞车是煤田测井工作中使用的重要设备,PSCJ-3绞车设计合理,性能稳定,完全能够满足测井工作需要。
广西煤炭地质局(广西煤炭地质一五0勘探队测井中心)广西柳州 545005摘要:测井绞车是煤田测井工作中使用的重要设备,PSCJ-3绞车设计合理,性能稳定,完全能够满足测井工作需要。
关键词:绞车系统,绞车控制器,反馈电路,触发电路,过载保护电路,井深测量显示电路,预置报警停车一、概述在煤田测井过程中,绞车系统主要负责井下仪器的提升和下放,井下仪器的供电及信号的传输都要通过该系统来完成,该系统工作的性能稳定性直接影响到测井工作能否顺利完成。
测井绞车系统由:绞车控制器、绞车、变速箱、电机、电缆和滑轮等几部分组成。
绞车控制器控制绞车作提升和下放运动,控制仪器提升或下放入井。
绞车控制器以数字显示测井速度、电机电压、电机电流、测井深度参数,绞车控制器主要作用是对绞车实行调速运行,其主要作用有如下几点:①控制直流电机转向,调节直流电机转速,并且稳定其转速。
②测量并显示电缆运行速度,控制电缆以恒定速度运行。
③数字显示电缆速度、电机电压、电机电流参数。
④如果探管在井中受阻,控制器拾取电机电流信号,控制绞车自动报警停车。
⑤预置深度报警停车功能。
⑥通过传动滑轮带动光电码盘产生的脉冲,准确显示测井深度。
二、绞车控制器的控制原理绞车控制器由电机控制电路、井深测量显示电路、报警控制电路等几部分组成。
绞车控制核心为电机控制电路,电机控制电路控制电机正反转、对电机实施调速控制和恒速控制。
它由无级调速电路、触发电路、反馈电路、电缆运行速度回路和电机负载等几部分组成。
现主要分析北京中地英捷仪器厂生产的PSJC-3型绞车,其工作原理介绍如下:1.电机控制电路电机控制电路控制电机正反转、对电机实施调速控制和电缆恒速控制。
基于STM32的井深测量和校正系统

基于STM32的井深测量和校正系统作者:张娇谢雁来源:《信息记录材料》2019年第01期【摘要】石油勘探时需要测量不同井位地层特性,其测量精度关系到能否在储层所在深度作业,因此深度的测量精确有很大的意义。
但精确的测量需要考虑井下仪器重量引起的电缆拉伸、马丁代克计量轮的打滑、磨损等引起的误差。
本技术结合马丁代克和光电编码器的特性,采用了高性能STM32F103作为CPU,并再加入了校正算法,有效地提高了测量精度。
经试验验证,该系统达到了较好的效果。
【关键词】STM32F103;光电编码器;数据校正;井深【中图分类号】TB921 【文献标识码】A 【文章编号】1009-5624(2019)01-0081-021 引言深度测量是测井作业中一项非常重要的部分,测量数据的准确度对于油气井的开采有着十分重要的意义[1]。
在实际测量中一般会将电缆的长度作为油井的深度,但我们很难获得比较准确的深度信息,造成误差的原因很多,主要是下面两方面:其一,电缆本身有一定的伸缩性,在井筒内会受到力和温度等因素的影响而被拉伸,而且井越深,伸张量越大;其二,光电编码器的抖动,传动轮的打滑、磨损都会对测量精度带来影响[2]。
为了减少误差,本技术仅使用了具有丰富硬件资源的STM32F103给出了深度测量和校正的系统设计原理和实现流程。
2 系统的总体设计本系统组成如图1所示。
在数据测量时,只需将测井电缆绕在传动轴上,使得光电编码器与传动轴同轴转动,运行的测井电缆带动光电编码器的测量轮旋转,产生A、B两相深度脉冲信号。
将深度脉冲信号输入到STM32F103通过I/O口配置的定时器X的TI1和TI2通道中,STM32F103对脉冲进行方向判断、计数,校正等操作,并通过串口传送产生的深度数据至计算机,实现深度实时显示。
3 系统硬件设计3.1 光电编码器光电编码器又称为手动脉冲发生器,是通过光电转换将输出轴的机械几何位移量转换为脉冲或数字量的传感器。