拉氏变换及其计算机公式
拉氏变换详细解读

s+a
(二)、拉氏变换的主要定理 )、拉氏变换的主要定理 1.线性定理
L[ f1(t ) + f2 (t )] = L[ f1(t )] + L[ f2 (t )] = F1(s) + F2 (s)
L[kf (t )] = kL[ f (t )] = kF(s)
2.微分定理
df (t ) L = sF(s) − f (0+ ) dt
n −at
s 2 2 s +ω n! sn+1 n!
( s + a)
1
n+1
( s + a) ( s + b)
1 s ( s + a) ( s + b)
( s + a) ( s + b)
s
序号
−at
f(t)
F(s)
13
e sinωt e cosωt
− at
( s + a ) + ω2
2
ω
14
s + a ) + ω2 (
) 式中 f (−1) (0+ ) 为 ∫ f (t dt 在t时间坐标轴的右端 趋于零时的f 的值,相当于初始条件。 趋于零时的f(t)的值,相当于初始条件。
f (t )(dt )2 = 1 F(s) + 1 f (−1) (0+ ) + 1 f (−2) (0+ ) L ∫∫ s2 s2 s
2. 部分分式展开法 (利用逆变化的线性原理)
控制工程中,象函数F(s)通常可以表示有理分式形式 控制工程中,
B(s) bm sm + bm−1sm−1 + bm−2 sm−2 +⋅⋅⋅⋅⋅⋅ +b1s + b0 F(s) = = A(s) an sn + an−1sn−1 + an−2 sn−2 +⋅⋅⋅⋅⋅⋅ +a1s + a0
机械工程控制基础(拉氏变换)

拉氏变换的优势和局限性
优势
拉氏变换为我们提供了一种更方便、更灵活地分 析和解决机械工程中的问题的方法。
局限性
尽管拉氏变换在许多情况下非常有用,但在处理 非线性和时变系统时可能存在一定的限制。
结论和要点
拉氏变换是机械工程 中一种重要的数学工 具。
拉氏变换可以将函数 从时域转换到复频域。
它具有许多重要的性 质和公式,方便我们 分析和解决问题。
拉氏变换的性质
1 线性性质
拉氏变换遵循线性性质,可以对输入信号进行线性组合。
2 时移性质
通过在时域中移动输入信号,我们可以在复频域中对应地移动拉氏变换。
3 频移性质
拉氏变换可以将频率的偏移转移到复频域中。
拉氏变换的公式
输入信号 常数函数 阶跃函数 正弦函数
拉氏变换 1/s 1/s^2 s/(s^2 + w^2)
在机械工程中,拉氏变换被广泛应 用于控制系统、信号处理和系统建 模。
然而,它也有一些局限性,在处理 非线性和时变系统时需要注意。
机械工程控制基础(拉氏 变换)
在机械工程中,拉氏变换是一种重要的数学工具。本演示将介绍拉氏变换的 定义、性质、公式、逆变换以及在机械工程中的应用。同时,我们也会探讨 拉氏变换的优势和局限性。
拉氏变换的定义
拉氏变换是一种数学工具,用于将一个函数从时域转换到复频域。通过将函 数的时间的依赖性转换为频率的依赖性,我们可以更好地理解和分析信号和 系统的行为。
拉氏变换的逆变换
拉氏变换
F(s)
逆拉氏变换
f(t)常数ຫໍສະໝຸດ 数delta(t)拉氏变换在机械工程中的应用
1
控制系统分析
通过拉氏变换,我们可以分析和设计机械控制系统。
拉氏变换表(包含计算公式)
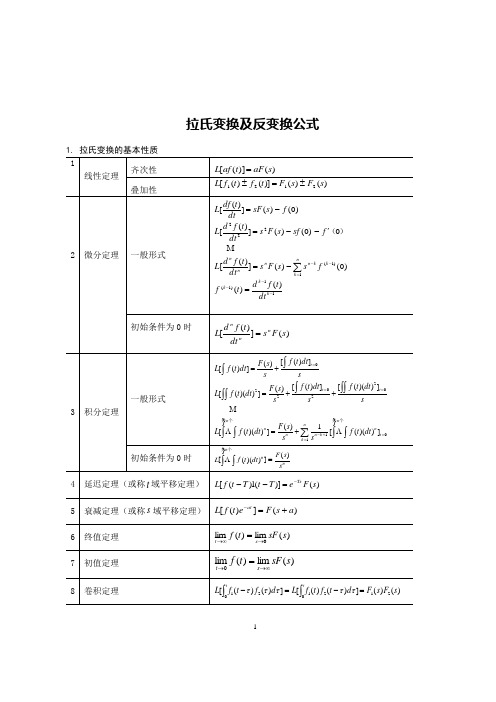
1拉氏变换及反变换公式1. 拉氏变换的基本性质 1线性定理齐次性)()]([s aF t af L =叠加性)()()]()([2121s F s F t f t f L ±=±2微分定理一般形式=-=][ '- -=-=----=-∑11)1()1(1222)()()0()()(0)0()(])([)0()(])([k k k k nk kn nnndtt f dt ffss F s dtt f dL f sf s F s dt t f dL f s sF dt t df L )(初始条件为0时)(])([s F s dtt f dL nnn=3 积分定理一般形式∑⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰==+-===+=++=+=nk t nn k n nnn t t t dt t f sss F dt t f L sdt t f sdt t f ss F dt t f L s dt t f ss F dt t f L 112222]))(([1)(])()([]))(([])([)(]))(([])([)(])([个共个共初始条件为0时nnn ss F dt t f L )(]))(([=⎰⎰个共4 延迟定理(或称t 域平移定理) )()](1)([s F e T t T t f L Ts-=--5 衰减定理(或称s 域平移定理) )(])([a s F e t f L at +=-6 终值定理 )(lim )(lim 0s sF t f s t →∞→=7 初值定理 )(lim )(lim 0s sF t f s t ∞→→=8 卷积定理)()(])()([])()([21021021s F s F d t f t f L d f t f L tt =-=-⎰⎰τττττ22. 常用函数的拉氏变换和z 变换表 序号 拉氏变换E(s)时间函数e(t) Z 变换E(z)1 1δ(t)12 Tse--11∑∞=-=)()(n T nT t t δδ1-z z 3 s1 )(1t1-z z 4 21st2)1(-z Tz5 31s22t32)1(2)1(-+z z z T6 11+n s!n tn)(!)1(limaTnn na ez zan -→-∂∂-7 as +1 ate- aTez z -- 8 2)(1a s + atte- 2)(aTaT ez Tze --- 9 )(a s s a + ate--1 ))(1()1(aTaTez z ze-----10 ))((b s a s ab ++- btatee---bTaTez z ez z ----- 11 22ωω+s tωsin 1cos 2sin 2+-T z z T z ωω12 22ω+s s tωcos1cos 2)cos (2+--T z z T z z ωω13 22)(ωω++a s t eatωsin - aTaT aTeT zez T ze22cos 2sin ---+-ωω 14 22)(ω+++a s a st eatωcos -aTaTaTeT ze zTzez 222cos 2cos ---+--ωω15aT s ln )/1(1-Tt a/az z-33. 用查表法进行拉氏反变换用查表法进行拉氏反变换的关键在于将变换式进行部分分式展开,然后逐项查表进行反变换。
机械控制工程基础-CH2补充内容:拉氏变换

式中 p1 、
p2 、… pn为方程F2(s)=0的n个不同的根,它们可以是 实数也可以是复数。由于 s pk 时|F(s)|,故这些根称为 F(s)的极点(pole)。 A1 、 A2 、 An…为待定系数。为了求出其中 任何一个常数Ak,用(spk)乘上式的两边各项得 :
F ( s )( s pk ) A1 ( s pk ) A2 ( s pk ) A ( s pk ) Ak n s p1 s p2 s pn
该性质表明一个函数积分后的拉氏变换等于这个函数的拉氏变换除 以复参量s。 求 f ( t ) tu( t )
解
的象函数F(s) 。
tu(t ) u ( )d0 t因为所以
1 1 F ( s) L{tu(t )} L{ u ( )d } L{u (t )} 2 0 s s
二、拉普拉斯变换性质
基本要求:掌握常用函数拉普拉斯变换的基本性质。 1.线性性质
若 L { f1 (t )} F1 (s), L { f 2 (t )} F2 (s) ,a、b为任意常数,则
L {af1 (t ) bf 2 (t )} aF1 ( s) bF2 ( s) L 1{aF1 ( s) bF2 ( s)} af1 (t ) bf 2 (t )
(1 t )e at
(t )
A
A(1 e t )
1
A s A s( s ) n! s n 1
sin( t ) cos( t )
e at sin( t ) e at cos( t )
tn
(n为正 整数)
n! ( s a) n 1 s (s )2 s sin cos s2 2 s cos sin s2 2 ( s a) sin cos ( s a) 2 2 ( s a) cos sin ( s a) 2 2
拉氏变换常用公式

拉氏变换常用公式
拉氏变换是一种常用的数学方法,它可以用来求解方程的根。
它最初由拉氏在1877年提出,用于解决线性方程组。
它的基本思想是:将方程分解为两个简单的子问题,然后用递归方法进行求解。
拉氏变换的基本公式是:
Xn+1=f(Xn)
其中,Xn为当前迭代的值,f(Xn)为函数,是一个由Xn生成新值的函数。
拉氏变换最常用于解决非线性方程,其原理是:通过迭代不断更新Xn,使得当前迭代的值Xn+1接近满足方程的解,从而解决方程。
拉氏变换的基本步骤是:
(1)选择一个初始值XO;
(2)计算新值Xn+1=f(Xn);
(3)以Xn+1替换Xn,重复上述步骤,直至满足要求的精度;
(4)最后得到的Xn+1即为方程的解。
拉氏变换具有优越的收敛性,但是它运算较慢,而且容易陷入局部
最小值,因此经常需要多次迭代。
拉氏变换虽然有一定的局限性,但是它仍然是一种重要的数学方法,在计算机科学、工程学等领域有着广泛的应用,如求解非线性方程、求解最优化问题等。
总之,拉氏变换是一种优越的数学方法,在计算机科学和工程学等领域有着重要的应用。
拉氏变换详细解读
φ = arctan
1− 1 1−ζ
2
ζ
e−ζωnt sin ωn 1 − ζ 2 t + φ 1−ζ 2
(
18
φ = arctan
2 ωn 2 s ( s2 + 2ζωn s + ωn )
ζ
根据表格直接写出结果
L [δ (t )] = 1, L e
− at
1 L [1(t )] = , s
ω s L [sin ωt ] = 2 , L [ cos ωt ] = 2 2 2 s +ω s +ω
e sinωt →
−at
1 = s+a,
1 L [t ] = 2 s 1 at L e = s−a
s + a ) + ω2 (
2
ω
e cosωt →
−at
s + a ) + ω2 (
3
2
5s3Y (s) + 6s2Y (s) + sY (s) + 2Y (s) = 4sX(s) + X(s) (5s3 + 6s2 + s + 2)Y (s) = (4s + 1) X(s)
Y (s) 4s + 1 = 3 X (s) 5s + 6s2 + s + 2
3.积分定理 积分定理
f (t )dt = 1 F(s) + 1 f (−1) (0+ ) L ∫ s s
2. 部分分式展开法 (利用逆变化的线性原理)
控制工程中,象函数F(s)通常可以表示有理分式形式 控制工程中,
B(s) bm sm + bm−1sm−1 + bm−2 sm−2 +⋅⋅⋅⋅⋅⋅ +b1s + b0 F(s) = = A(s) an sn + an−1sn−1 + an−2 sn−2 +⋅⋅⋅⋅⋅⋅ +a1s + a0
拉氏变换表(包含计算公式)[1]1
![拉氏变换表(包含计算公式)[1]1](https://img.taocdn.com/s3/m/9f3f48a80029bd64783e2cf2.png)
1拉氏变换及反变换公式1. 拉氏变换的基本性质 1线性定理齐次性)()]([s aF t af L =叠加性)()()]()([2121s F s F t f t f L ±=±2微分定理一般形式=-=][ '- -=-=----=-∑11)1()1(1222)()()0()()(0)0()(])([)0()(])([k k k k nk k n n nn dt t f d t f f s s F s dt t f d L f sf s F s dt t f d L f s sF dt t df L )( 初始条件为0时)(])([s F s dtt f d L n nn = 3积分定理一般形式∑⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰==+-===+=++=+=nk t n n k n n nn t t t dt t f s s s F dt t f L sdt t f s dt t f s s F dt t f L sdt t f s s F dt t f L 101022022]))(([1)(])()([]))(([])([)(]))(([])([)(])([个共个共初始条件为0时n n n ss F dt t f L )(]))(([=⎰⎰个共4 延迟定理(或称t 域平移定理) )()](1)([s F e T t T t f L Ts -=--5 衰减定理(或称s 域平移定理) )(])([a s F e t f L at +=-6 终值定理 )(lim )(lim 0s sF t f s t →∞→=7 初值定理 )(lim )(lim 0s sF t f s t ∞→→=8 卷积定理)()(])()([])()([21021021s F s F d t f t f L d f t f L tt =-=-⎰⎰τττττ22. 常用函数的拉氏变换和z 变换表 序号 拉氏变换E(s)时间函数e(t) Z 变换E(z)1 1δ(t) 12 Tse --11∑∞=-=0)()(n T nT t t δδ1-z z 3 s1 )(1t1-z z 4 21s t2)1(-z Tz5 31s 22t32)1(2)1(-+z z z T6 11+n s!n t n)(!)1(lim 0aT n n n a ez z a n -→-∂∂- 7 as +1 at e - aTe z z-- 8 2)(1a s +atte- 2)(aT aT e z Tze ---9 )(a s s a+ ate--1))(1()1(aT aT e z z z e ----- 10 ))((b s a s ab ++-bt at e e --- bTaT e z ze z z ----- 11 22ωω+s t ωsin1cos 2sin 2+-T z z Tz ωω 12 22ω+s st ωcos1cos 2)cos (2+--T z z T z z ωω13 22)(ωω++a s t e atωsin - aTaT aT eT ze z Tze 22cos 2sin ---+-ωω 14 22)(ω+++a s a st eatωcos -aTaT aT e T ze z T ze z 222cos 2cos ---+--ωω15aT s ln )/1(1- T t a /az z -33. 用查表法进行拉氏反变换用查表法进行拉氏反变换的关键在于将变换式进行部分分式展开,然后逐项查表进行反变换。
全面完整的学习拉氏变换计算
2010-10-7
53
2010-10-7
54
◇实例1 设系统微分方程为: 若xi(t)=1(t),初始条件分为x’o(0),xo(0),试求 xo(t) 解:对微分方程左边进行拉氏变换:
2010-10-7
55
2010-10-7
56
对方程右边进行拉氏变换:
从而
2010-10-7
57
2010-10-7
◇叠加定理 □齐次性:L[αf(t)]=αL[f(t)],α为常数 □叠加性:L[af1(t)+bf2(t)]=aL[f1(t)]+b[f2(t)] a,b为常数; 显然,拉氏变换为线性变换。
2010-10-7
11
◇实微分定理
证明:由于
2010-10-7
12
所以: 同样有:
式中,f’(0),f”(0),……为f(t)的各阶导数在 t=0时的值
五、拉氏变换和拉氏反变换 ●拉氏变换 设函数f(t)(t≥0)在任一有限区间上分段连续, 且存在一正常数σ,使得 则函数f(t)的拉普拉氏变换存在,并定义为:
式中:s=σ+jω(σ, ω均为实数)
2010-10-7 1
称为拉普拉氏积分; F(s)称为函数f(t)拉普拉氏变换或象函数,它 是一个复变函数;f (t)称为F(s) 的原函数; L为拉氏变换的变换符号。 ●拉氏反变换
2010-10-7
31
◇F(s)含有共轭复数极点 假设F(s)含有一对共轭复数极点-p1、-p2, 其余极点均为各不相同的实数极点,则:
式中,A1和A2的值由下式求解
上式为复数方程,令方程两端实部、虚部 分别相等即可确定A1和A2的值
2010-10-7 32
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时域的函数可以通过线性变换的方法在变换域中表示,变换域的表示有时更为简捷、方便。
例如控制理论中常用的拉普拉斯变换,简称拉氏变换,就是其中的一种。
一、拉氏变换的定义已知时域函数,如果满足相应的收敛条件,可以定义其拉氏变换为(2-45)式中,称为原函数,称为象函数,变量为复变量,表示为(2-46)因为是复自变量的函数,所以是复变函数。
有时,拉氏变换还经常写为(2-47)拉氏变换有其逆运算,称为拉氏反变换,表示为(2-48)上式为复变函数积分,积分围线为由到的闭曲线。
二、常用信号的拉氏变换系统分析中常用的时域信号有脉冲信号、阶跃信号、正弦信号等。
现复习一些基本时域信号拉氏变换的求取。
(1)单位脉冲信号理想单位脉冲信号的数学表达式为(2-49)且(2-50)所以(2-51)说明:单位脉冲函数可以通过极限方法得到。
设单个方波脉冲如图2-13所示,脉冲的宽度为,脉冲的高度为,面积为1。
当保持面积不变,方波脉冲的宽度趋于无穷小时,高度趋于无穷大,单个方波脉冲演变成理想的单位脉冲函数。
在坐标图上经常将单位脉冲函数表示成单位高度的带有箭头的线段。
由单位脉冲函数的定义可知,其面积积分的上下限是从到的。
因此在求它的拉氏变换时,拉氏变换的积分下限也必须是。
由此,特别指明拉氏变换定义式中的积分下限是,是有实际意义的。
所以,关于拉氏变换的积分下限根据应用的实际情况有,,三种情况。
为不丢掉信号中位于处可能存在的脉冲函数,积分下限应该为。
(2)单位阶跃信号单位阶跃信号的数学表示为(2-52)又经常写为(2-53)由拉氏变换的定义式,求得拉氏变换为(2-54)因为阶跃信号的导数在处有脉冲函数存在,所以单位阶跃信号的拉氏变换,其积分下限规定为。
(3)单位斜坡信号单位斜坡信号的数学表示为(2-55)图2-15单位斜坡信号另外,为了表示信号的起始时刻,有时也经常写为(2-56)为了得到单位斜坡信号的拉氏变换,利用分部积分公式得(2-57)(4)指数信号指数信号的数学表示为(2-58)拉氏变换为(2-59)(5)正弦、余弦信号正弦、余弦信号的拉氏变换可以利用指数信号的拉氏变换求得。
由指数函数的拉氏变换,可以直接写出复指数函数的拉氏变换为(2-60)因为(2-61)由欧拉公式(2-62)有(2-63)分别取复指数函数的实部变换与虚部变换,则有:正弦信号的拉氏变换为(2-64)同时,余弦信号的拉氏变换为(2-65)常见时间信号的拉氏变换可以参见表2-1。
表2-1常见函数的拉普拉斯变换表三、拉氏变换的一些基本定理(1)线性定理若函数的拉氏变换分别为,则(2-66)(2)延迟定理若函数的拉氏变换为,则(2-67)信号与它在时间轴上的平移信号的关系见图2-18所示。
该定理说明了时间域的平移变换在复数域有相对应的衰减变换。
应用延迟定理,可以简化一些信号的拉氏变换的求取。
例2-9周期锯齿波信号如图2-18所示,试求该信号的拉氏变换。
解:该信号为周期信号。
因此,已知信号第一周期的拉氏变换为时,应用拉氏变换的延迟定理,得到周期信号的拉氏变换为锯齿波信号第一周期的拉氏变换为所以,锯齿波信号的拉氏变换为(3)衰减定理若函数的拉氏变换为,则(2-68)该定理说明了时间信号在时间域的指数衰减,其拉氏变换在变换域就成为坐标平移。
当时间函数带有指数项因子时,利用拉氏变换的衰减定理,可以简化其拉氏变换的求取计算。
例2-10试求时间函数的拉氏变换。
解:因为正弦函数的拉氏变换为所以,应用拉氏变换的衰减定理可以直接写出另外,衰减定理与延迟定理也表明了时间域与变换域的对偶关系。
(4)微分定理若函数的拉氏变换为,且的各阶导数存在,则各阶导数的拉氏变换为(2-69)(2-70)…………(2-71) 当所有的初值(各阶导数的初值)均为零时,即则(2-72)(2-73)…………(2-74)证明:(在此只证明一阶导数的拉氏变换,其余请读者自证) 由拉氏变换的定义式利用分部积分公式令则所以证毕。
(5)积分定理若函数的拉氏变换为,则(2-75)定理的证明同样采用分部积分公式可以证得,请读者自证。
式中为函数的在时刻的积分值。
积分定理与微分定理互为逆定理。
(6)初值定理若函数的拉氏变换为,且在处有初值,则(2-76)即时域函数的初值,可以由变换域求得。
证明由微分定理令即可证得。
注意,拉氏变换的初值定理是满足拉氏变换的定义的,因此由初值定理所求得的时间信号的初值为,而不是或者。
例如阶跃信号,可以利用拉氏变换的初值定理求得其初值为(7)终值定理若函数的拉氏变换为,且存在,则(2-77)即时域函数的终值,也可以由变换域求得。
证明:由微分定理两边对取极限因为,所以方程左边方程右边所以证毕。
(8)卷积定理若时域函数分别有拉氏变换,时域函数的卷积分为(2-78)又常表示为(2-79)则其拉氏变换为(2-80)这表明时域函数卷积分在变换域成为变换域函数的乘积。
证明可参考其他教材。
时域函数在变换域中表示有两个优点。
一个优点是简化了函数,例如指数函数和正、余弦函数都是时域中的超越函数,在变换域中成为有理函数表示;另一个优点是简化了运算,如时域函数的卷积分在变换域中成为变换域函数的乘积。
常用的拉氏变换基本定理可以参见表2-2。
表2-2 拉普拉斯变换的基本性质表四、拉普拉斯反变换拉普拉斯变换将时域函数变换为复变函数,相应地它的逆运算可以将复变函数变换回原时域函数。
拉氏变换的逆运算称为拉普拉斯反变换,简称拉氏反变换。
由复变函数积分理论,拉氏反变换的计算公式为(2-81)上式的拉氏反变换,由于是复变函数的积分,计算复杂,一般很少采用。
所以已知反求时,通常采用的方法是部分分式法。
由于工程中常见的时间信号,它的拉氏变换都是s的有理分式。
因此,可以将分解为一系列的有理分式之和,再利用拉氏变换表确定出所有的有理分式项所对应的时域函数,合成时域函数。
上述过程遵循的是拉氏变换的线性定理。
拉氏变换通常为s的有理分式,可以表为(2-82)式中,是分子多项式,是分母多项式,系数和均为实数,,为正整数,而且。
在复变函数理论中,分母多项式所对应的方程,其所有的解称为的极点。
这样可以表示为(2-83)由复变函数的留数定理,可以确定的各分式,求得拉氏反变换为(2-84)下面分别讨论各种计算情况。
1.全部为单根可以分解为(2-85)其中(2-86)为复变函数对于极点的留数。
则拉氏反变换为(2-87)例2-11 已知:,求拉氏反变换。
解:将分解为部分分式极点为:,则对应极点的留数为则分解式为查拉氏变换表可得2.有重根只考虑一个单根情况,设为单根,为重根,,则可以展开为(2-88)式中,与单根相对应的系数的求法与前述相同。
与重根相对应的各系数,,由留数定理可得计算公式如下:(2-89)…………(2-90)因为所以,拉氏反变换为(2-91)例2-12求的拉氏反变换。
解:可以分解为系数C1,C2,分别对应单根,,由前述单根情况计算为系数分别对应二重根s3=-1于是,的分解式为查表求得拉氏反变换为3.A(s)=0有共轭复数根时域函数有共轭复数根时,可以将其作为单根(互不相同)来看待。
但是在分解时,涉及到复数运算,计算繁琐。
拉氏变换中有如下的变换对:上述变换对的分母都是共轭复数形式的二次三项式,相对应的反变换均为正余弦型。
所以,除了可以按照单根情况计算外,还可以按照下述例题的计算步骤进行计算。
例2-13已知,试求其拉氏反变换。
解:因为分子多项式的次数与分母多项式的次数相等,必然存在常数项,而常数项的拉氏反变换为脉冲函数,所以有:第一步,将分子多项式除以分母多项式,分离常数项为第二步,将余式的二次三项式按照上述拉氏变换表整理为第三步,写出拉氏反变换。
因为所以五、拉氏变换法求解微分方程列出控制系统的微分方程之后,就可以求解该微分方程,利用微分方程的解来分析系统的运动规律。
微分方程的求解方法,可以采用数学分析的方法来求解,也可以采用拉氏变换法来求解。
采用拉氏变换法求解微分方程是带初值进行运算的,许多情况下应用更为方便。
拉氏变换法求解微分方程步骤如下:(1)方程两边作拉氏变换。
(2)将给定的初始条件与输入信号代入方程。
(3)写出输出量的拉氏变换。
(4)作拉氏反变换求出系统输出的时间解。
例2-14 滤波电路如图2-19所示,输入电压信号,电容的初始电压分别为0V和1V时,分别求时域解。
解:RC电路的微分方程为方程两边作拉氏变换由拉氏变换的线性定理得由拉氏变换的微分定理得将系统参数值带入整理得输出的拉氏变换为(1)时,(2)时,拉氏变换及反变换公式3. 用查表法进行拉氏反变换用查表法进行拉氏反变换的关键在于将变换式进行部分分式展开,然后逐项查表进行反变换。
设)(s F 是s 的有理真分式1110111)()()(a s a s a s a b s b s b s b s A s B s F n n n n m m m m ++++++++==---- (m n >) 式中系数n n a a a a ,,...,,110-,m m b b b b ,,,110- 都是实常数;n m ,是正整数。
按代数定理可将)(s F 展开为部分分式。
分以下两种情况讨论。
① 0)(=s A 无重根这时,F(s)可展开为n 个简单的部分分式之和的形式。
∑=-=-++-++-+-=ni ii n n i i s s c s s c s s c s s c s s c s F 12211)( 式中,n s s s ,,,21 是特征方程A(s)=0的根。
i c 为待定常数,称为F(s)在i s 处的留数,可按下式计算:)()(l i ms F s s c i s s i i-=→ 或iss i s A s B c ='=)()(式中,)(s A '为)(s A 对s 的一阶导数。
根据拉氏变换的性质,从式(F-1)可求得原函数[]⎥⎦⎤⎢⎣⎡-==∑=--n i i i s s c L s F L t f 111)()(=ts n i iie c -=∑1② 0)(=s A 有重根设0)(=s A 有r 重根1s ,F(s)可写为())()()()(11n r rs s s s s s s B s F ---=+ =nn i i r r r r r r s s c s s c s s c s s c s s c s s c -++-++-+-++-+-++-- 11111111)()()( 式中,1s 为F(s)的r 重根,1+r s ,…, n s 为F(s)的n-r 个单根;其中,1+r c ,…, n c 仍按式(F-2)或(F-3)计算,r c ,1-r c ,…, 1c 则按下式计算:)()(lim 11s F s s c r s s r -=→)]()([lim111s F s s dsdc r s s r -=→- )()(lim !11)()(1s F s s dsd j c r j j s s jr -=→-(F-5))()(lim )!1(11)1()1(11s F s s dsd r c r r r s s --=--→原函数)(t f 为 [])()(1s F L t f -=⎥⎦⎤⎢⎣⎡-++-++-+-++-+-=++---n n i i r r r r r r s s c s s c s s c s s c s s c s s c L 111111111)()()(t s nr i i t s r r r r ie c e c t c t r c t r c ∑+=---+⎥⎦⎤⎢⎣⎡+++-+-=1122111)!2()!1((F-6)。