PID专家控制器在温控系统中的应用
dip加热算法

dip加热算法
DIP加热算法通常指的是在温度控制系统中使用的PID(比例-积分-微分)控制算法。
PID控制算法是一种闭环控制算法,它通过不断地读取传感器的数据来监测系统的当前状态,并根据设定的目标值调整输出,以达到控制的目的。
在温度控制应用中,PID算法可以用来维持或改变系统的温度。
以下是PID算法在温控系统中的一些关键步骤:
1. 传感器反馈:首先需要一个能够测量当前温度的传感器,这个
传感器的数据会作为反馈信号输入到控制系统中。
2. PID控制器:PID控制器会根据设定的目标温度和实际温度之间的差异来计算出一个控制信号。
这个控制信号是基于三个参数的:比例系数(P)、积分时间(I)和微分时间(D)。
比例部分负责对当前误
差进行响应,积分部分负责消除长期的稳态误差,而微分部分则预测未来的误差变化。
3. 执行机构:PID控制器计算出的控制信号会被用来驱动执行机构,比如加热器或冷却装置,以此来调整系统的温度。
在实际应用中,PID算法需要根据具体的系统特性进行调整,这包括选择合适的传感器、调整PID参数以及确保执行机构的响应速度和精度。
通过对这些组件的精确控制,PID算法可以实现对温度的精确控制,从而在各种工业和科研领域中得到广泛应用。
PLC和模糊PID在退火炉温控系统中的应用

S i e me n s¥ 7 - 2 0 0 s e ie r s P L C a s t h e e o r e , u s i n g f u z z y P I D a l g o i r t h m b a s e d o n P L C, I t d i s c u s s e s t h e a p p l i c a t i o n o f f u z z y P I D c o n t r o l i n t e mp e r a t u r e c o n t r o l s y s t e m a n d d e s i g n s a f u z z y P I D c o n t r o l l e r , r e a l i z e s t h e s y s t e m s i mu l a t i o n i n MAT ・ L AB . I n t h e p r a c t i c a l r u n n i n g , i t s h o ws t h a t s y s t e m p e f r o r ma n c e wa s g o o d a n d o p e r a t i o n wa s s i mp l e , s a f e a n d c o n v e n i e n t .
a t a f a c t o r y i n t i a n j i n t o r e t u r n h i s n o n — s t a n d a r d a r t i f a c t s d o c o n t i n u o u s t e c h n o l o g i c a l r e q u i r e me n t s . T h i s s y s t e m w i t h
pid在温控中的作用

pid在温控中的作用PID控制是一种自动控制系统中常用的一种控制算法,它根据被控对象的实际运行情况不断调整控制量,以达到稳定的控制效果。
在温控中,PID控制器被广泛应用,可以有效地控制温度波动,保持温度稳定,提高生产效率。
本文将深入探讨PID在温控中的作用。
一、PID控制原理PID控制器是由比例(P)、积分(I)和微分(D)三部分组成的控制器。
它根据被控对象的反馈信号,通过计算偏差的大小和变化率来调整输出控制量,以实现对被控对象的精确控制。
1. 比例控制(P)比例控制是根据偏差的大小来调整控制量的大小,开环放大比例即为比例控制。
比例系数越大,控制量和偏差之间的关系越密切,对温度波动的抑制效果也越好。
但是,过大的比例系数可能引起震荡或过冲现象,影响控制效果。
2. 积分控制(I)积分控制是根据偏差随时间的积累来调整控制量的大小,通过累积偏差的方法来修正系统的静态误差。
积分系数越大,系统的稳态精度越高,但同时也容易导致系统的超调和振荡现象。
3. 微分控制(D)微分控制是根据偏差的变化率来调整控制量的大小,通过对偏差的变化速度进行调节以提高系统的动态响应能力。
微分系数越大,系统的响应速度越快,但同时也会增加系统的灵敏度,容易受到噪声的干扰。
综合比例、积分和微分三部分的作用,PID控制器可以根据实际情况进行调整,以实现对被控对象的精确控制。
二、PID在温控中的应用在温控中,PID控制器被广泛应用于各种工业生产过程中,如化工、食品加工、医药制造等。
它可以对温度进行精确控制,提高生产效率,减少生产成本,保障产品质量。
下面我们将介绍几种常见的温控应用场景。
1. 温度恒温器温度恒温器是一种专门用于保持恒定温度的设备,它通常由PID控制器、加热元件和传感器组成。
PID控制器可以根据被控对象的温度反馈信号,通过比例、积分和微分的调节来控制加热元件的功率,以实现对温度的精确控制。
在实验室、医药制造等领域,温度恒温器被广泛应用于热源的稳定控制。
PID温度控制的实现
PID温度控制的实现PID温度控制是一种常用的控制方法,可以应用于各种温度调节的场景,如炉温控制、恒温器控制、温室控制等。
PID是比例、积分、微分的简称,它通过不断调整输出信号的大小来控制温度的变化,以使温度尽可能稳定在设定值。
PID控制器的实现需要以下几个关键步骤:1.设置控制目标:在开始实施PID控制之前,需要首先设定好控制的目标温度和误差范围。
例如,我们要将温度控制在25摄氏度左右,可以设置误差范围为±0.5摄氏度。
2.采集温度信号:温度控制器需要实时监测被控对象的温度变化情况,因此需要使用温度传感器来采集温度信号。
温度传感器可以是热电偶、热敏电阻或红外线传感器等。
3.根据误差计算PID输出信号:PID控制的核心是根据温度误差来计算输出信号。
误差是设定温度与实际温度之间的差异,可以通过对差值取绝对值或者平方等方法来表示。
PID控制器根据误差值来调整控制量的大小,使得误差尽可能地减小。
3.1比例控制(P控制):比例控制是根据误差的大小,通过乘以一个比例系数Kp来调整控制量的大小。
具体计算公式为:P = Kp * Error。
其中,Kp是比例系数,Error是温度设定值与实际温度的差异。
3.2积分控制(I控制):积分控制是对误差进行累计,以减小稳态误差。
它通过乘以一个积分系数Ki来调整控制量的大小。
具体计算公式为:I = Ki * ∑(Error * dt)。
其中,Ki是积分系数,∑(Error * dt)是误差的积分值,dt为采样时间间隔。
3.3微分控制(D控制):微分控制是根据误差变化的速率来调整控制量的大小,以抑制温度的过冲或超调。
它通过乘以一个微分系数Kd来调整控制量的大小。
具体计算公式为:D = Kd * (dError/dt)。
其中,Kd是微分系数,(dError/dt)为误差的微分值,表示误差的变化速率。
4.计算总的输出信号:总的输出信号可以通过加权求和来计算,即 Output = P + I + D。
BP神经网络PID控制器在热油锅炉温控中的应用

Abstract: The PID control algorithm based on BP neural network was introduced,combining with multi- mode control theory,BP neural network PID controller was applied to the temperature control of hot oil boiler. The neural network PID was compared with the ordinary PID control. The results show that the method has the characteristics of small overshoot,short time and good robustness,which makes up for the shortcomings of conventional PID in the boiler temperature control,such as the parameters is difficuit to be adjusted. This control strategy is applied to the temperature control of hot oil boiler,and the self-control system of the boiler is constructed to make the boiler in the best combustion state and ensure the safe and economical operation of the boiler.
pid温度控制总结与展望

pid温度控制总结与展望
PID温度控制是一种广泛应用于工业和家用设备中的温度控制方法。
它是通过对温度反馈信号进行反馈控制来维持温度稳定,从而实现对设备的精确控制。
本文将对PID温度控制进行总结和展望。
总结:
1. PID控制器的工作原理
PID控制器是由比例、积分和微分三部分组成的控制器。
它通过对温度反馈信号进行比较,得出误差值,然后将误差值分别输入到比例、积分和微分部分中进行处理,最终输出一个控制信号来调整设备的工作状态,从而维持设备的温度稳定。
2. PID控制器的优点
PID控制器具有响应速度快、精度高、适应性强等优点。
在工业和家用设备中广泛应用,如烤箱、冰箱、空调等。
3. PID控制器的不足
PID控制器的不足之处在于对于一些非线性系统和时间变化系统,PID
控制器的效果会受到影响。
展望:
1. PID控制器的改进
PID控制器的改进是一个研究热点。
研究人员通过引入模糊控制、神经网络控制等新技术来改进PID控制器,提高其在非线性系统和时间变化系统中的控制效果。
2. PID控制器在新领域中的应用
随着科技的不断发展,各种新领域的出现,PID控制器也将得到更广泛的应用。
例如,在智能家居中,PID控制器可以用于智能温控系统;在机器人领域中,PID控制器可以用于机器人的运动控制等。
总之,PID温度控制作为一种常用的温度控制方法,其优点明显,但也存在一些不足。
未来,通过对PID控制器的改进和在新领域中的应用,PID控制器将得到更广泛的应用和发展。
PID控制在温度控制系统中的应用研究

PID 控制在温度控制系统中的应用研究摘要PID 控制是一种常用的控制方式,在温度控制系统中得到了广泛的应用。
本文介绍了PID 控制的原理和实现方法,分析了PID 控制的优势与不足,并探讨了PID 控制在温度控制系统中的应用。
实验结果表明,PID 控制可以在短时间内将温度稳定在设定值附近,具有较高的控制精度和响应速度。
关键词:PID 控制;温度控制系统;控制精度;响应速度1.引言在工业生产、科学实验和生活中,温度控制是一项非常重要的控制任务。
温度控制可以使工业产品、科学实验和生活用品保持稳定的温度,达到保质保量的目的。
温度控制系统根据温度的变化,通过控制加热或冷却设备,使温度保持在设定值附近。
PID 控制是温度控制系统中一种常用的控制方式,可以实现温度的精确控制,具有广泛的应用。
2.PID 控制原理PID 控制是传统控制中最常用的一种控制方式,它基于系统的误差、误差变化率和误差积分值进行控制。
PID 控制的基本原理可以表示为下式:u(t) = Kp*e(t) + Ki*∫e(t)dt + Kd*de(t)/dt其中,u(t)表示控制器的输出值,Kp、Ki 和Kd 是分别控制误差、误差积分和误差变化率的控制系数,e(t)是误差信号,de(t)/dt 是误差信号的变化率。
具体来说,Kp 决定控制器对误差的纠正力度,Ki 决定控制器对误差积分的纠正力度,Kd 决定控制器对误差变化率的纠正力度。
PID 控制器使用误差的当前值、时间累积值和变化率的信息进行控制,可以实现快速响应和平稳控制。
3.PID 控制实现方法PID 控制器可以采用硬件和软件两种实现方法。
硬件方式的实现通常使用模拟电路或微控制器等控制芯片。
软件方式的实现通常使用计算机软件进行控制。
下面简要介绍两种实现方法的特点。
3.1硬件实现方法硬件方式的实现方法通常具有较高的实时性和可靠性,适用于对控制精度要求较高的场合。
硬件PID 控制器通常由比较器、积分器和微分器等基本运算电路组成。
不同PID控制算法的温控器在温度控制中的应用
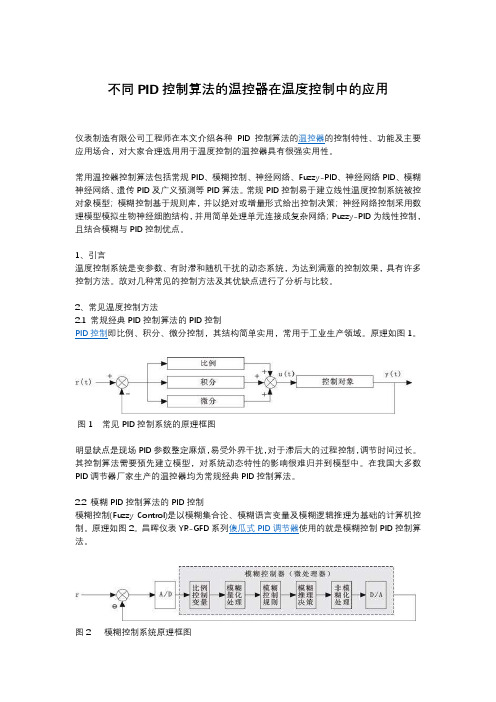
不同PID控制算法的温控器在温度控制中的应用仪表制造有限公司工程师在本文介绍各种PID控制算法的温控器的控制特性、功能及主要应用场合,对大家合理选用用于温度控制的温控器具有很强实用性。
常用温控器控制算法包括常规PID、模糊控制、神经网络、Fuzzy-PID、神经网络PID、模糊神经网络、遗传PID及广义预测等PID算法。
常规PID控制易于建立线性温度控制系统被控对象模型;模糊控制基于规则库,并以绝对或增量形式给出控制决策;神经网络控制采用数理模型模拟生物神经细胞结构,并用简单处理单元连接成复杂网络;Puzzy-PID为线性控制,且结合模糊与PID控制优点。
1、引言温度控制系统是变参数、有时滞和随机干扰的动态系统,为达到满意的控制效果,具有许多控制方法。
故对几种常见的控制方法及其优缺点进行了分析与比较。
2、常见温度控制方法2.1 常规经典PID控制算法的PID控制PID控制即比例、积分、微分控制,其结构简单实用,常用于工业生产领域。
原理如图1。
图1 常见PID控制系统的原理框图明显缺点是现场PID参数整定麻烦,易受外界干扰,对于滞后大的过程控制,调节时间过长。
其控制算法需要预先建立模型,对系统动态特性的影响很难归并到模型中。
在我国大多数PID调节器厂家生产的温控器均为常规经典PID控制算法。
2.2 模糊PID控制算法的PID控制模糊控制(Fuzzy Control)是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的计算机控制。
原理如图2。
昌晖仪表YR-GFD系列傻瓜式PID调节器使用的就是模糊控制PID控制算法。
图2 模糊控制系统原理框图2.3 神经网络PID控制算法的PID控制神经网络控制采用数理模型的方法模拟生物神经细胞结构,用简单处理单元连接形成各种复杂网络,并采用误差反向传播算法(BP)。
原理如图3:图3 神经网络控制系统的原理框图2.4 Fuzzy-PID控制算法的PID控制模糊控制不需知道被控对象的精确模型,易于控制不确定对象和非线性对象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10, 20 20, +∞
2, 0, 2
2, 0, 2 4, 0, 2
4, 0, 2 4, 0, 4
4, 0, 2 8, 0, 8
8, 0, 4 8, 0, 8
8, 0, 6 8, 0, 6
16, 0, 8 满功率
满功率
满功率
(2) PID 算法 由 于 标 准 PID 算 式 中 积 分 项 的 作 用 ,有 可 能 会 使系统产生一个较大的超调量,故基本算法采用位 置式 PD 加改进的积分项。位置式 PD 算法如下:
2 制袋机 PID 专家控制器的设计
2.1 系统分析
针 对 制 袋 机 电 热 特 性 ,要 求 系 统 控 温 范 围 80~ 200℃,稳定后温度波动不超过 0.5℃。由于制袋机 烫刀以电阻丝加热,加热元件工作在低温区,滞后 时间 22s 左右。为了保证加热元件快速升到设定温 度 ,为 加 热 元 件 提 供 的 功 率 富 余 很 多 。8%的 输 出 功 率 就 能 保 证 烫 刀 稳 定 在 100℃ 。烫 刀 暴 露 于 空 气 中 , 随着自身温度升高,其散热条件也不断变化。利用 常 规 PID 控 制 很 难 得 到 好 的 控 制 效 果 ,为 了 实 现 快 速精确的温度控制,根据被控对象的特性建立专家 系统 PID 控制方式,如图 1。
2, 4, 8 2, 4, 4 1, 4, 4 1, 0, 4
1, 4, 4 1, 4, 2 1, 4, 2 1, 0, 2
1, 4, 8 2, 4, 8 2, 4, 8 2, 0, 8
2, 4, 8 4, 2, 8 8, 2, 8 8, 0, 8
4, 2, 16 16, 2, 16 满功率 满功率
收稿日期: 2004- 02- 17;修回日期:2004- 03- 15 作 者 简 介 : 魏 红 昀 ( 1976- ), 女 ,河 南 人 , 在 读 硕 士 ,1998 年 毕 业 于 武 汉 科 技 大 学 , 从 事 计 算 机 系 统 集 成 与 网 络 控 制 、 工 业 过 程 控 制 、 智
PID 专家控制器在温控系统中的应用
魏红昀 1,邓忠华 1,魏晴昀 2 (1. 华中科技大学 控制科学与工程系,湖北 武汉 430074;2. 空军雷达学院 机械工程系,湖北 武汉 430019)
摘要:以单片机为核心的制袋机温度控制系统采用了基于专家智能与 PID 相结合的专家控制器,利用专家系统 知识库输出修正 PID 参数以改变 PID 控制方式。据对象特性设计了 99 条控制规则,并将各种规则的调整方法及调 整参数存于控制器。用改进积分法控制温度波动以达到最佳 PID 控制效果。
测 量 值 (度 )
110 100
90 80
70
60
50
40
300
400
800
1200 1600
(a) 简 单 智 能 控 制
200
400 800 1200 1600 2000
j= 0
即改进后的 PID 输出为:
Out (n )
=
Kp
* e(n) +
Kd
* [e(n) −
e(n
−
1)] +
n − 1 P( j) ∑
j= 0 K µ
3 实际效果与结论
以 上 述 专 家 智 能 PID 复 合 控 制 方 法 为 理 论 依 据 ,以 单 片 机 196KC 为 核 心 设 计 了 制 袋 机 温 度 控 制 系统。其中,温度传感器为镍铬镍硅热电偶;加热
把 专 家 系 统 和 PID 控 制 器 结 合 ,利 用 专 家 系 统 知 识 库 输 出 修 正 PID 参 数 ,改 变 PID 控 制 方 式 以 达 到最佳 PID 控制效果。根据对象特性及设计要求, 设 计 了 99 条 控 制 规 则 ,并 预 先 将 规 则 下 的 调 整 方 法 及调整参数存储于控制器中。专家控制规则根据当 前 偏 差 e(n)及其变化率△e(n)的大小决定控制方式 和是否需修改比例系数 Kp、改进积分增益 Kμ和
满 功 率 输 出
+
e
Yr
-
输出关断
u
PID 控 制 器
专 家 系 统 PID
Kp,ki,kd 参 数 修 正
被控对象 Y PID 基本参数
de/ dt
图 1 专 家 智 能 PID 复 合 控 制 器 的 原 理 框 图
(1) 专家控制 本专家控制器的推理结构采用数据驱动的正 向 推 理 策 略 。 产 生 式 规 则 采 用 IFe(n) AND △e(n) THEN out(n)形式。专家系统的关键是专家知识的 建立、确定。知识获取,有些来自工艺人员的长期 总结,有些借助于控制领域的知识和分析。如:温 差很大时,满功率输出;温度稳定阶段,比例增益 要选小一些;为抑制波动,微分增益选大一些等。
2. Dept. of Mechanics Engineering, Air Force Radar Academy, Wuhan 430019, China)
Abstract: PID expert controller based on expert intelligent and PID was adopted in temperature control system
功 率 的 调 节 由 无 触 点 继 电 器 实 现 。经 过 试 验 及 应 用 , 在 不 同 条 件 下 的 控 温 波 动 度 均 优 于 0.3℃ , 调 整 时 间不超过 10min,综合性能优于以往的控制方法, 可满足制袋机需要。图 2 给出了简单智能 PID[2]控 制效果和本文的专家智能 PID 复合控制效果。
8, 2, 16 8, 4,1 6 4, 4, 16
4, 2, 8 4, 2, 8 1, 4, 8
k0p、 k0μ 、 k0D 关闭输出
关闭输出
关闭输出 1, 4, 2
1, 4, 8
1, 4, 4
1, 4, 4 1, 4, 4 2, 4, 8
2, 4, 8 1, 4, 8
0, 4, 0
1, 4, 8 2, 2, 8
兵工自动化
测控技术
O. I. Automation
2004 年第 23 卷第 4 期 Measurement and Control Technique 2004, Vol. 23, No.4
文章编号:1006- 1576(2004)04- 0050- 02
Key words: Expert control; PID control; Intelligent control; Temperature control
1 引言
温度控制系统具有非线性、强耦合、时变、时 滞 等 特 性 ,采 用 常 规 PID 控 制 难 以 兼 顾 高 精 度 与 快 速 性 的 双 重 要 求 。 而 专 家 系 统[1] 对 此 不 仅 可 作 出 较 好的预测,还可处理带有误差或不完善的数据。综 合 PID 控 制 和 专 家 系 统 的 优 点 ,故 提 出 专 家 式 智 能 与 PID 相 结 合 的 复 合 控 制 方 法 ,将 专 家 经 验 和 PID 控制定量调节特性充分运用于控制过程中,较好地 满足了高精度控温中的高精度与快速性要求。
分
和
微
分
增
益
;a
T p
、
a
T
μ
和
a
T D
分别为当前调整状态
下的比例、积分和微分项修正系数。
表 1 各调整状态的判别规则及修正系数
e Δe
- ∞, -2 - 2, -1
-∞, -2
- 2, 1.25
关闭输出
- 1.25, - 0.625 关闭输出 8, 2, 16
- 0.625, - 0.25 8, 4, 16 8, 4, 16
1, 3
3, 10
关闭输出 关闭输出 2, 0, 2
2, 2, 2 4, 0, 2 4, 2, 8 4, 0, 4 4, 2, 8 4, 0, 8 4, 2, 8 4, 0, 8 4, 2, 8 4, 0, 8 4, 2, 8 4, 0, 8
注:表中的系数在使用时全部除以 16。如查表得到 2, 4, 8,则相应的修正系数为 0.125, 0.25, 0.5。
能控制等研究。
·50·
兵工自动化
测控技术
O. I. Automation
2004 年第 23 卷第 4 期 Measurement and Control Technique 2004, Vol. 23, No.4
- 0.25, 0.25 8, 0, 4 4, 8, 8
0.25, 0.375 8, 0, 4 4, 4, 4
0.375, 0.625 8, 0, 4 4, 4, 4
0.625, 1
8, 0, 4 4, 4, 2
1, +∞
8, 0, 2 4, 0, 2
- 1, - 0.5 - 0.5, - 0.25 - 0.25, 0.25 0.25, 0.5 0.5, 1
P(n)=Kp*e(n)+ Kd*[e(n)- e(n- 1)]
式中:e(n)=r(n)–y(n) P(n)-第 n 次采样时 PD 控制器的输出; Kp,Kd-分别为比例增益和微分增益; e(n)-第 n 次采样时刻的偏差; e(n-1)-第 n-1 次采样时刻的偏差; r(n)-第 n 次采样时刻的设定值; y(n)-第 n 次采样时刻被控量的测量值。
关键词:专家系统;PID 控制;智能控制;温度控制
中图分类号:TP182 文献标识码:A
Application of PID Expert Controller in Temperature Control System