直线开关磁阻电机发电系统仿真研究
基于Matlab的开关磁阻电机控制系统仿真建模研究

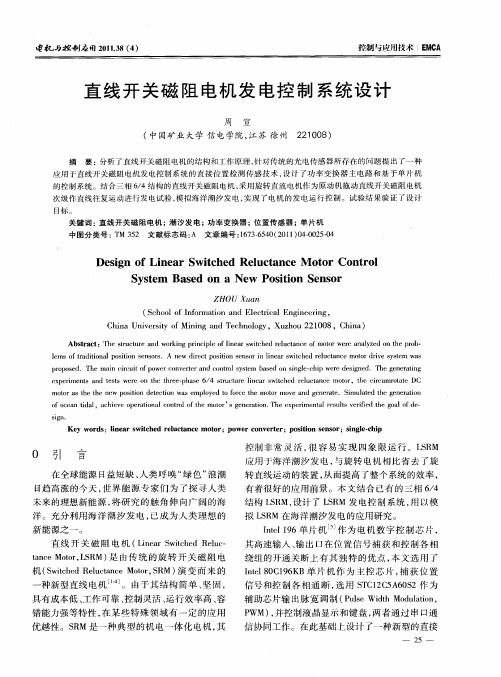
Reference speed
Speed controller io*
PI controller
Current co n tro l l e r
speed
p o si ti o n
Current controller
Angle sel e cti on Angle selection
i a,i b,i c
1 SRM 的数学模型
6/4 三相 SRM 是一个高阶、非线性、强耦合的多变量 系统,绕组电流的非正弦与铁心磁通密度的高饱和是 SRM 运行的两大特点[7]。为了便于分析,假定:
·1016·
系统仿真学报
Vol. 17 No. 4 Apr. 2005
(1) 三相绕组对称,每相的两个线圈作正向串联,忽略
效性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:开关磁阻电机 (SRM);仿真建模;Matlab;角位置控制 (APC);电流斩波控制 (CCC)
文章编号:1004-731X (2005) 04-1015-07
中图分类号:TM352
文献标识码:A
Study on Modeling and Simulation of Switched Reluctance Motor Control System Based on Matlab
2.2 速度控制模块
为实现 SRM 性能的快速预测与优化设计,本文在分析 SRM 数学模型的基础上,借助于 Matlab 强大的仿真建模能 力,利用 Simulink 中内含的功能元件,提出了一种基于 Matlab/Simulink 建立 SRM 控制系统仿真模型的新方法,有 效克服了现有 SRM 建模方法存在的不足。其基本思想是: 将 SRM 电 机 控 制 系 统 的 功 能 单 元 模 块 化 , 在 Matlab/Simulink 中建立独立的功能模块:SRM 本体模块、 速度控制模块、电流控制模块、转角选择模块、参数计算 模块等,将这些功能模块进行有机整合,即可搭建出 SRM 控制系统整体设计的仿真模型。其中,速度环中采用 PI 控 制 , 电 流 环 中 将 角 位 置 控 制 ( APC ) 与 电 流 斩 波 控 制 (CCC)相结合,以保证电机高速、低速运行时都有理想 的控制性能。该方法思路清晰,实现便捷,效果理想,仿 真结果证明了该种建模方法的快速性和有效性。
机电控制作业--开关磁阻电机及matlab仿真

机电控制作业--开关磁阻电机及matlab仿真开关磁阻电机一、概述开关磁阻电动机结构简单、可靠性高、恒转矩、恒功率而且调速性能好(覆盖功率范围10W~5MW的各种高、低速驱动调速系统)、价格便宜、鲁棒性好等优点引起了各国电气传动界的广泛重视,由其构成的调速系统兼有直流传动和普通交流传动的优点,是继变频调速系统、无刷直流电动机调速系统的最新一代无级调速系统。
这种新型调速系统使开关磁阻电机存在许多潜在的领域,在各种需要调速和高效率的场合均能得到广泛使用。
开关磁组电机调速系统之所以能在现代调速系统中异军突起,主要是因为它卓越的系统性能,主要表现在:(1) 电动机结构简单、成本低、可用于高速运转。
(2)功率电路简单可靠。
(3)系统可靠性高。
(4)起动转矩大,起动电流低。
典型产品的数据是:起动电流为额定电流的15%时,获得起动转矩为100%的额定转矩;起动电流为额定电流的30%时,起动转矩叮达其额定转矩的250%。
(5)适用于频繁起停及正反向转换运行。
(6)可控参数多,调速性能好。
控制开关磁阻电动机的主要运行参数和常用方法至少有四种:相导通角、相关断角、相电流幅值、相绕组电压。
(7)效率高,损耗小。
以3kw SRD为例,其系统效率在很宽范围内都是在87%以上,这是其它一些调速系统不容易达到的。
(8)可通过机和电的统一协调设计满足各种特殊使用要求。
二、开关磁阻电动机的结构图1-1开关磁阻电机结构图典型的三相开关磁阻电动机的结构如图1-1所示。
其定子和转子均为凸极结构,图示电机的定子有8个极,转子有6个极。
定子极上套有集中线圈,两个空间位置相对的极上的线圈顺向串联构成一相绕组,图2-1中只画出了A 相绕组;转子由硅钢片叠压而成,转子上无绕组。
该电机则称三相8/6极开关磁阻电动机。
在结构形式及工作原理上,开关磁阻电动机与大步距反应式步进电机并无差别;但在控制方式上步进电机应归属于他控式变频,而开关磁阻电动机则归属于自控式变频;在应用上步进电机都用作“控制电机”而开关磁阻电机则是拖动用电机,因此电机设计时所追求的目标不同而使电机的设计参数不同。
直线开关磁阻电机发电控制系统设计
Ke y wor ds:lne r s t h eucanc ot r;powe onv r e i a wic ed r l t n e o i l - hi
0 引 言
在全 球能 源 日益短 缺 、 类 呼 唤 “ 色 ” 潮 人 绿 浪 日趋 高涨 的今 天 , 界 能 源 专 家 们 为 了探 寻 人 类 世 未 来 的理想 新 能 源 , 研 究 的触 角 伸 向 广 阔 的海 将 洋 。充 分利 用 海 洋 潮 汐发 电 , 已成 为 人 类 理 想 的
关 键 词 : 线 开 关 磁 阻 电 机 ;潮 汐 发 电 ;功 率 变 换 器 ; 置 传 感 器 ;单 片 机 直 位
中 图 分 类 号 : M 5 文 献 标 志码 : 文 章 编 号 :6 364 (0 1 0 -0 50 T 32 A 17 -5 0 2 1 )402 -4
De i n o ne r S t h d l c a e M o o nt o sg f Li a wic e Re u t nc t r Co r l
Sy t m s d o w sto Se s r se Ba e n a Ne Po iin n o
zHoU a Xu n
( c ol f noma o n l tcl n ier g S ho o fr t nad Ee r a E g ei , I i ci n n C iaU iesyo nn n eh o g , uh u2 10 ,C ia hn nvri f t MiigadT cn l y X zo 2 0 8 hn ) o
迫 机 再粒 制 应 用 2 1,8( ) 01 3 4
控制与应用技术 ; M A EC
直 线 开 关 磁 阻 电 机 发 电控 制 系 统 设 计
开关磁阻电机调速系统中功率变换器的仿真与研究 毕业论文
……………………. ………………. ………………山东农业大学毕 业 论 文 开关磁阻电机调速系统中功率变换器的仿真与研究 院 部 机械与电子工程学院 专业班级 电气工程及其自动化3班 届 次 20**届 学生姓名 学 号 指导教师 二О**年六月一日 装订线……………….……. …………. …………. ………目录摘要 (I)Abstract (II)1 绪论 (1)1.1开关磁阻电机调速系统的发展现状 (1)1.2 开关磁阻电机调速系统的应用领域 (1)1.3 开关磁阻电机调速系统简述 (2)1.3.1 开关磁阻电机调速系统的基本构成 (2)1.3.2 开关磁阻电机调速系统的优缺点 (3)2 开关磁阻电机的基本原理 (4)2.1 开关磁阻电机的基本结构 (4)2.2 开关磁阻电机的基本工作原理 (5)2.3 开关磁阻电机的数学模型 (6)2.5 本章小结 (7)3 开关磁阻电机的功率变换器部分和控制方式 (7)3.1 调速系统功率变换器的要求和特点 (7)3.2 常用的几种功率变换器的电路 (8)3.2.1 不对称半桥电路 (8)3.2.2 每相只有一个主开关管的功率变换器 (9)3.2.3 电容分压型功率变换器 (10)3.2.4 具有最少数量主开关管的功率变换器 (11)3.3 开关磁阻电机的控制方式 (12)3.3.1 角度位置控制(APC)法 (12)3.3.2 电流斩波控制(CCC)法 (13)3.3.3 电压斩波控制(CVC)法 (13)3.4 本章小结 (14)4 Matlab动态仿真 (14)4.1 Matlab工具概述 (14)4.2 Matlab仿真模型 (15)4.3 仿真运行结果 (18)4.4 本章小结 (25)5 总结和体会 (25)5.1 设计总结 (25)5.2 个人体会 (26)参考文献 (27)致谢 (28)ContentsAbstract (II)1 Summary (1)1.1 Development Status Of SRD System (1)1.2 Applications Of SRD System (1)1.3 Switched Reluctance Drive System Description (2)1.3.1 Basic configuration Of SRD System (2)1.3.2 Advantages and disadvantages of SRD (3)2 The basic principle of SRM (4)2.1 The basic structure of SRM (4)2.2 The basic operating principle of SRM (5)2.3 Mathematical model of SRM (6)2.5 Summary (7)3 Power converter and the control mode of SRM (7)3.1 Power Converter requirements and characteristics (7)3.2 Several commonly used power converter circuit (8)3.2.1 Asymmetrical half-bridge circuit (8)3.2.2 Each phase has only one main switch of the power converter (9)3.2.3 Capacitance division type power converter (10)3.2.4 The main switch has a minimum number of power converters (11)3.3 Switched reluctance motor control mode (12)3.3.1 Angle Position Control(APC) (12)3.3.2 Current chopping control(CCC) (13)3.3.3 Chopped V oltage Control(CVC) (13)3.4 Summary (14)4 Matlab Dynamic simulation (14)4.1 Matlab Tools Overview (14)4.2 Matlab Simulation Model (15)4.3 The simulation results (18)4.4 Summary (25)5 Summary and Experience (25)5.1 Design Summary (25)5.2 Personal Experience (26)References (27)To thank (28)开关磁阻电机调速系统中功率变换器的研究与设计(山东农业大学机械与电子工程学院泰安 271018)摘要:本文在综合分析开关磁阻电机工作原理的基础上,着重介绍了开关磁阻电机调速系统中功率变换器的结构和各种形式功率变换器的优点,应用MATLAB 软件建立了开关磁阻电机调速系统的仿真模型。
开关磁阻风力发电系统最大风能跟踪控制仿真研究

开关磁阻风⼒发电系统最⼤风能跟踪控制仿真研究开关磁阻风⼒发电系统最⼤风能跟踪控制仿真研究开关磁阻发电机/风⼒发电/最⼤风能追踪1引⾔由于能源和环境问题⽇益突出,作为⼀种新型的可再⽣能源,风⼒发电近年来发展很快。
应⽤于风⼒发电系统中的发电机也在不断改进。
⽬前,在投⼊使⽤的风⼒发电装置中,应⽤较多的发电机有异步感应发电机、双馈发电机和永磁同步发电机。
但这三种发电机在使⽤中也存在着不⾜。
普通异步感应发电机转速近似于恒定值,风速变化时转速不能随之变化,⽆法进⾏最⼤功率跟踪,对风能的利⽤率⽐较低。
双馈电机结构复杂,造价昂贵,运⾏不稳定,还需要在风轮机和发电机之间安装增速箱,带来了额外的功率损失。
永磁同步机可以省去增速齿轮箱,实现变速直驱运⾏,但永磁材料易退磁,且在输出有功功率的同时也要输出较⼤的⽆功功率,效率⽐较低[1]。
作为⼀种新型的电机,开关磁阻电机具有结构简单,可靠性⾼,电机损耗⼩,运⾏效率⾼;变速范围宽,适合于⾼、低速运⾏,转速可以随风速的变化⽽改变,能实现最⼤风能跟踪;可采⽤直驱式发电,省掉了齿轮箱,提⾼了风能利⽤效率;输出为直流电,易于并⽹等众多优点。
综上所述,开关磁阻电机可在⼀定程度上弥补以上三种发电机的缺点,适合运⽤于变速恒频风⼒发电系统,具有⼀定的发展前景。
本⽂即构建了开关磁阻风⼒发电系统模型,从风⼒机的转速—功率特性出发,采⽤了转速反馈控制⽅法对开关磁阻风⼒发电系统的最⼤风能跟踪进⾏了仿真研究[2]。
2 SRG的⼯作原理及控制模式SRG可采⽤⾃励和他励两种发电模式。
⾃励模式在发电电压达到所需的稳定值后,由电机本⾝所发出的电压向励磁供电。
由于之后的电压由本⾝提供,致使此种模式下对电机的控制⽐较复杂。
他励模式是由外电源向励磁供电,励磁回路与发电回路彼此独⽴。
在SRG的发电运⾏中,励磁回路可以向系统提供稳定的励磁电压,⽽与发电电压⽆关,⼆者可以独⽴进⾏调节,对发电系统来说控制⽐较⽅便[3]。
开关磁阻电机调速系统仿真设计

开关磁阻电机调速系统仿真设计摘要:开关磁阻电机(SRM)的模型是进行SRM的仿真和性能预测、控制算法设计等研究的基础。
该项目所用500?W电机模型是在MATLAB 平台下基于SRM的物理特性所建立的SRM查找表模型,并基于该模型,建立了SRM仿真系统。
关键词:开关磁阻电机模型仿真系统SRM1 开关磁阻电机的建模问题开关磁阻电机的非线性使其性能的精确分析和计算较为困难。
由于SRM电机的定、转子采用双凸极结构,电动机在运行时其定、转子极身存在着显著的边缘效应和高度局部饱和,从而引起了整个磁路的高度非线性,其每相绕组的电感是电流和电动机转子位置角的非线性函数,很难准确建立SRM电机的非线性电感模型,因此如何建立比较精确的SRM电机的数学模型,是国内外广大学者一直研究的问题。
2 SRM模型数据的获取目前,关于SRM电机建模的方法主要有有限元分析法、等效磁链法、查表插值法、人工智能法以及函数逼近法等。
本模型数据的获取采用改进的“DC脉冲测试法”测得0~22.5?°某固定角度的电压与电流值,由电流方程积分求得电流-角度-磁链数据,接着由机电方程计算得出电流-角度-转矩数据。
经过神经网络平滑处理并整理得到电流表与转矩表。
3 电动仿真系统搭建对于一个实际SRM系统,其运行时存在多种非线性因素,如功率开关的导通压降,关断漏电流,电机的铁耗等。
精确模拟上述非线性特性非常困难,并且仿真模型将变得十分复杂。
因此,在仿真研究中一般均忽略上述因素对SRM的影响。
为简化分析,在本文的SRM仿真模型建立中进行如下假设:(1)母线直流电压与设定值严格相等,没有波动;(2)功率变换器各开关器件均为理想开关,即导通时压降为零,关断时电流为零;(3)忽略铁耗和相间互感。
根据电机物理特性方程和获取的查找表构建SRM本体模型,并和其它模块一起共同构成了SRM仿真系统。
本系统模型采用逻辑模块与数学模块搭建,主要包括以下几个模块:控制模块,角度变换模块,SRM本体模块。
开关磁阻起动_发电机系统的建模与仿真_孙剑波

第25卷第1期湖 北 工 业 大 学 学 报2010年2月Vol .25No .1 Journal of Hubei University of Technology Feb .2010[收稿日期]2009-12-15[基金项目]国家自然科学基金(50807019).[作者简介]孙剑波(1976-),男,湖北孝感人,华中科技大学讲师,研究方向:新型电机及控制.[文章编号]1003-4684(2010)01-0059-04开关磁阻起动/发电机系统的建模与仿真孙剑波,韦忠朝,王双红,詹琼华,匡 哲(华中科技大学电气与电子工程学院,湖北武汉430074)[摘 要]开关磁阻电机因具有结构简单、高可靠性等优点,因而适合应用在航空起动/发电机领域。
开关磁阻起动/发电机系统的数学模型包括开关磁阻电机、功率主电路以及滤波电路。
在建模过程中,结合了磁场有限元和机电耦合方程组,因此考虑了磁场饱和和机电耦合问题。
通过仿真,可以预估系统的性能和设计系统的参数,使得系统输出电压达到目标要求。
仿真结果验证了系统设计的正确性。
[关键词]开关磁阻电机;发电机系统建模;滤波电路[中图分类号]T M 352[文献标识码]:A 开关磁阻电机(Sw itched Reluctance M o to rs ,S RM )的转子上既无绕组,又无永磁体,定子各相独立运行,因而具有高可靠性、非常宽的调速范围、高效率、可缺相运行等优点,其应用领域不断拓展。
目前,S RMs 已经被成功应用于飞机电源系统[1-3]、混合动力汽车的起动/发电机[4-8],以及风力发电系统[9-10].与其他电机相比,SRM 兼顾了可靠性、功率密度以及高速运行能力,因此特别适合应用在航空起动/发电机领域.在飞机发动机点火之前,SRM 作为电动机来起动发动机;在点火之后,飞机发动机又反过来带动SRM 发电.于是一台S RM 既具有起动功能,又具有发电功能.本文针对一台应用在航空领域的开关磁阻起动/发电机系统进行数学建模和仿真,实现整个系统的性能预估和参数设计,以验证系统设计的正确性.1 数学模型开关磁阻起动/发电系统包含3个主要部分:一台三相12/8极开关磁阻电机、功率主电路和滤波电路.功率主电路如图1所示.图1 功率主电路 电机的三相绕组与不对称半桥主电路相连.在起动阶段,由电池给系统供电,电机作为电动机带动发动机起动.为了避免电池直接给负载电阻(R L )供电,直流母线分成2条母线:励磁母线和发电母线.2条母线由1个二极管(RD 2)相连.同时,在发电阶段电池不允许充电,所以电池与励磁母线之间也接有1个二极管(RD 1).由于电机发出的电能具有脉动性,为了使输出电压达到航空电源的技术要求,发电母线电压需经过一个滤波电路后输出.滤波电路由2个电容(C 2,C 3)和一个电感(L )构成.SRM 的数学模型可表示为:d ψk d t =U p k -i k R p d ωdt=(T e -T L )/J d θdt=ω.(1)式中:i k ,R p ,ψk 分别是电机相电流、相电阻和相磁链;ω是转子角速度;T e ,T L 分别是电磁转矩和负载转矩;J 是转动惯量;θ是转子位置角;U pk 是电机绕组的相电压.而U p k =U exc(S k =1),0(S k =0),-U gen(S k =-1).其中:k =1,2,3;S k 代表开关函数;U exc 是励磁母线电压;U g en 是发电母线电压.由功率主电路和滤波电路的电路方程式得:dU exc d t =U e -U exc C 1·R D 1+I ba ck -I exc C 1,dU g en dt =I g en -i LC 2,dU out dt =(i L -U o utR L )/C 3,di L d t =U gen -U o ut L;(2)i exc =i exca +i excb +i excc .(3)其中: i exck =i k(S k =1),0(S k =0),0(S k =-1);i g en =i gena +i g en b +i genc -i b ack .(4)而i genk =0(S k =1),(S k =0),i k(S k =-1);i b ack=U gen -U excR D 2.(5)又R D 1=0.01(U exc U e ),inf(U exc >U e );R D 2=0.01(U g en ≥U exc ),inf(U g en <U exc ).U e是电池电压.I exc、I gen、I b ack分别是励磁母线电流、发电母线电流、发电母线回馈到励磁母线的电流.U o ut 是系统输出电压.C 1是励磁母线的滤波电容.C 2和C 3是滤波电路的电容.R D 是二极管的等效导通电阻.i L 是滤波电路的电感电流.2 仿真结果本系统中的SRM 主要结构参数如:定子外径0.14m ;定子内径0.09m ;轴径0.04m ;定子极数12;转子极数8;铁心轴向长度0.3m .每相绕组的磁链是该相电流和转子位置角的非线性函数(图2).磁链数据以表格形式存储起来,在仿真的每一步计算中,利用二维表格插值,实现磁链到电流的变换.图2 SRM 的磁链特性系统的控制框图如图3所示.系统为双闭环控制结构,外环为电压环,内环为功率环.电压环的误差信号经调节后作为功率环的给定信号.功率环的误差由开关角度的调整来减小.在起动阶段,外环开环,内环用来控制相电流.为了加快起动过程,电流给定为电机允许的最大电流值.在发电阶段,外环调节使得输出电压恒定.内环功率调节加快了输出电压的动态响应.图3 开关磁阻起动/发电机系统的控制框图在起动阶段,电机作为电动机运行,带动发动机从静止状态加速.当速度达到12000r /min 时,发动机点火,之后电机和发动机一起加速转子系统,当速度达到25000r /min 时,起动过程结束,电机转为发电机运行,由发动机带动发电.系统的速度响应如图4所示.整个起动过程经历了大约15s .图4 系统在起动阶段的速度响应当SRM 稳定运行在25000r /min 速度下发电60湖 北 工 业 大 学 学 报2010年第1期 时,电机相电流波形如图5所示.相电流最大值为60A ,发生在相绕组关断时刻.励磁母线电压、发电母线电压、输出母线电压、滤波电感电流波形如图6所示.由于滤波器的作用,输出母线电压的脉动比发电母线电压的脉动要小得多.输出电压在稳态情况下保持在(270±0.2)V 范围内.因此,系统的稳态性能达到了目标要求(270±4)V.励磁母线电流、发电母线电流、从发电母线回馈到励磁母线的电流波形如图7所示.一旦有电流从发电母线回馈到励磁母线时,励磁母线的电压就被钳制在270V ,该电压比电池电压(200V )高,所以二极管截止,电池脱离了励磁母线,防止了发电时给电池的充电.图7 各母线电流仿真过程中,还可对电机的转矩脉动进行分析,如图8所示.转矩脉动过大将会给机械系统带来不利的影响,因此必须加以分析.系统的转矩脉动因数为(T max -T min )/Tav =2.3017.航空电源对输出电压的动态响应也有较高的要求.在仿真中对负载突变情况下的输出电压动态响应进行了分析,如图9所示.当速度稳定在25000r /min 时,时间为0~0.04s ,发电机经历了一个起励过程,电气负载为8kW (额定负载);在0.04s 时刻,各母线电压均已达到稳定时,在这一时刻电气负载突变到9.2kW (115%额定负载);在0.08s 时刻,电气负载突变为4kW (50%额定负载).从图9可以看出,尽管负载出现了突变,输出电压始终都被控制在(270±1)V ,系统的动态响应非常好.滤波电路参数设计系统输出电压中的谐波必须得到有效抑制,该功能由滤波电路来完成.输出电压的频谱要求如图10所示.电容C 1、C 2、C 3的作用是平滑相应母线的电压,电感L 用来调整输出电压中的谐波频率.当C 1、C 2、C 3和L 分别取2200uF 、1000uF 、4000uF 和0.003mH 时,输出电压的频谱满足了目标要求(图11).61 第25卷第1期 孙剑波等 开关磁阻起动/发电机系统的建模与仿真3 结论仿真结果表明开关磁阻起动/发电机系统的各项稳态和动态性能均达到目标要求,验证了系统设计的正确性.[ 参 考 文 献 ][1] M acM inn S R ,Sember J W .Contr ol of a sw itched -r e -luctance aircraf t sta rter -g ener ator ove r a very widespeed ra ng e ,in Pro c [J ].Inte rsociety Energ y Conver sionEnginee ring Co nf .,1989:631-638.[2] Radun A .Generating with the switched -re luctance mo -to r in P ro c [J ].I EEE A PEC '94,1994:41-47.[3] Camero n D E ,Lang J H .T he contro l of high -speedvariable -reluctance g ene rato rs in electric po wer sys -tems [J ].IEEE T rans .I nd .A pplicat .,v ol .29,pp .1106–1109,N ov ./Dec .1993.[4] K oker nak J M ,T o rrey D A ,K aplan M .A switchedreluctance star te r /alternato r for hybrid electric v ehicles in Pro c [J ].IEEE T ransac tions O n Industrial Electro n -ics ,2002,49(1):-.[5] M ese E ,Sozer Y ,K oker nak J M ,et al .Optimal ex cita -tion of a high speed switched r eluctance g ener ator in Pr oc [J ].IEEE A P EC2000,2000:362-368.[6] Besbe s M ,G absi M ,Hoa ng E ,et al .SRM desig n forstarter -a lter nato r sy stem in P ro c [J ].ICEM 2000,2000:1931-1935.[7] K io skeridis I ,M ademlis C .O ptimal efficiency co nt rolof sw itched reluctance generato rs P owe r Elect ronics[J ].IEEE T ransac tions on Vo lume 21,2006,21(4):1062-1072.[8] T o rrey D A .Sw itched reluc tance g ene rato rs and theirco ntrol [J ].IEEE T rans .Ind .Electron .,2002,49(1):3-14.[9] T o rrey D A .V ariable -reluc tance g ener ator s in w ind -e n -e rgy sy stems in P ro c [J ].IEEE PESC '93,1993,93:561-567.[10]Ca rdenas R ,Ray W F ,A sher G M .Switched reluc -ta nce ge ner ator s fo r wind energ y applications in Pr oc [J ].IEEE P ESC '95,1995(5):59-564.Modeling and Simulation of Switched ReluctanceStarter /Generator SystemS UN Jian -bo ,WEI Zhong -chao ,WANG Shuang -ho ng ,ZHA N Qiong -hua ,KUANG Zhe(School o f E lectrical and E lectronics Engin .,H uazhong Univ .o f S ci .and Tech .,Wuhan 430074,China )A bstract :Sw itched Reluctance M otors show g reat advantag es of structural simplicity and hig h reliability apply ing to aerial starter /generator .This pape r proposes a m odeling method of sw itched reluctance star -ter /g enerator system ,including sw itched reluctance machine ,po wer circuit and filter circuit .The simula -tion m odel is constructed based on magnetic finite element analysis and electrom echanical dynamic equa -tions ,w hich considers m ag netic saturatio n and electro mechanical coupling .Throug h simulatio ns ,the per -fo rm ance of the system is evaluated .The control parame ters o f the contro ller and component parameters of filter circuit are de signed to satisfy the specificatio n perfo rmance o f the system .The simulatio n results val -idate the desig n of the sy stem .Keywords :switched reluctance starte r ;generato r ;engin System mo deling ;tilter circuit62湖 北 工 业 大 学 学 报2010年第1期 。
开关磁阻电机调速系统研究及MATLAB仿真
开关磁阻电机调速系统研究及MATLAB仿真在开关磁阻电机调速系统中,主要包括开关磁阻电机、功率电子器件
和控制算法三个主要部分。
其中,开关磁阻电机由转子和定子组成,通过
改变定子和转子之间的磁阻能够实现转速的调节。
功率电子器件用于控制
电机的输入和输出电力,常用的有IGBT、MOSFET等。
控制算法主要用于
实现对电机的调速控制,常用的方法有PID控制、模糊控制等。
在进行MATLAB仿真时,需要建立相应的数学模型。
首先需要将电机
的转动方程和电磁方程建立起来,然后根据电机的特性进行参数设置和仿
真实验设计。
可以通过MATLAB的仿真工具箱来实现对开关磁阻电机调速
系统的仿真,该工具箱提供了丰富的函数和算法,能够方便地进行系统建
模和仿真。
在进行仿真实验时,可以通过改变不同的参数来观察系统的动态响应。
例如,调整PID控制器的参数以改变电机的调速性能,通过观察电机的转
速和转矩变化情况来评估调速系统的性能。
同时,还可以分析电机控制系
统的稳定性、鲁棒性等,并对系统进行优化。
总之,开关磁阻电机调速系统的研究和MATLAB仿真是提高电机性能
和控制精度的重要手段。
通过建立数学模型和进行仿真实验,可以对系统
进行分析和优化,为实际应用提供参考和指导。
同时,也为开关磁阻电机
的进一步研究和应用奠定了基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直线开关磁阻电机发电系统仿真研究尹红梅 陈昊 孙晨晨(中国矿业大学 信电学院 江苏 徐州 221008)摘 要:本文分析了直线开关磁阻电机的结构和工作原理,建立RBF神经网络模型,训练出动子位置、电流和磁链的映射关系,以及磁共能与动子位置、电流的映射关系。
利用所得的数据在MATLAB环境下,根据LSRM的数学模型建立起LSRM电动和发电状态下的非线性模型,并进行了仿真实验,得出电流和转矩的特性。
最后通过样机试验的对比,验证了模型的有效性。
关键词:直线开关磁阻电机 RBF神经网络 发电 仿真中文图书分类号:TM359.4Simulation of Linear Switched Reluctance Generate SystemYin Hongmei1 Chen Hao2 Sun Chenchen3(School of Information and Electronic Engineering, China University of Mining and Technology, Xuzhou,Jiangsu, 221008, China)Abstract: After analyzing the structure and working principle of Linear Switched Reluctance Motor, a RBF Network model was set up to get the relationship of translator position, phase current and flux-linkage. And anther RBF Network model was set up to get the relationship of translator position, phase current and co-energy. And then two models of LSRM with moving and generation state were set up on the platform of MATLAB-Simulink. After simulation, the characteristic of phase current of main circuit and toque was provided. In the end, the experiment results were carried out. The results verified the model has good performance.Keywords:Linear Switched Reluctance Motor (LSRM), RBF Network, Generation, Simulation1 引言直线开关磁阻电机(Linear Switched Reluctance Motor,简称LSRM)是一种新型的牵引电机,是从旋转式开关磁阻电机(Switched Reluctance Motor,简称SRM)演化而来的[1][2]。
它结合了开关磁阻电动机和传统直线电动机的优点,有两大特色:一是电机动子直接与负载相关联,消除了传统的机械传动系统,减少了损耗,降低了成本;二是电机采用现代电力电子技术,将开关电路和电机绕组连接,使电机具有起动力矩大、过载能力强,调速范围广等优点[3]。
相比其他的交流直线电动机,LSRM在高精度加工以及大功率传输方面有更广泛的应用前景[4]。
开关磁阻电机的单机功耗并不比其它形式的电机效率高,但其整体传动装置的效率要比其它电机高得多[5],特别在精密直线往复运动中,它的优越性就显得十分明显[6]。
目前对于直线开关磁阻电机的研究中多的采用线性模型[7],这种模型的能模拟LSRM的基本特性,但是不够精确。
本文通过计算所得的先验磁链和磁共能数据,建立RBF神经网络模型,训练出动子位置、电流和磁链的映射关系,以及磁共能与动子位置、电流的映射关系[8]。
利用所得的数据在MATLAB环境下,根据LSRM的数学模型建立起LSRM的非线性模型。
并利用模型进行了电动和发电状态的仿真实验,最后通过样机试验的对比,验证了模型的有效性。
2 LSRM 的工作原理与数学模型直线开关磁阻电机采用双凸极结构,从结构让看,相当于沿SRM [9][10]圆周方向,将旋转的定、转子展开,运动的部分为动子,固定的部分(电机轨道)为定子。
由于制造工艺方面的限制,LSRM 动子、定子之间的气隙一般远较SRM 定、转子间的气隙大[11][12]。
从降低系统成本,使电机结构简单化的角度考虑, LSRM 一般采取相绕组固定在动子上,即动初级结构[13]。
本文所研究的LSRM 为三相6/4结构,如图1所示。
本电机是短初级长次级、定初级动次级结构,次级沿导轨滑动。
这种结构可以降低电机成本。
实际应用中可以根据需要加长次级长度,或者变为定次级动初级的结构,将次级铺设为导轨,初级沿导轨运行。
图1 三相6/4级LSRM 电机结构示意图1——绕组线圈 2——铁磁材料 Fig.1 Diagram of Three-phase 6/4 LSRM与SRM 相似,LSRM 同样遵循“磁阻最小原理”。
当给LSRM 初级一相通电时,由于磁通沿磁阻最小路径闭和,磁场扭曲产生的切向磁拉力使LSRM 动子移动,直至形成最小磁阻磁通回路。
LSRM 的基本数学方程: 1 LSRM 的电压平衡方程:dtd i R u j j j j ψ+= (1)相磁链j ψ又可以表示为相电感和相电流的乘积,即)(),(t i i x L j j j j =ψ (2)2 机械方程根据力学定律可以推导出LSRM 在电磁推力和负载拉力作用下的动子机械运动方程:l e F dtdxD dt dx M F ++=2 (3)式(3)中 e F ――电磁推力,D ――摩擦系数,M ――LSRM 动子质量, l F ――负载拉力。
3 机电联系方程LSRM 电机绕组电压平衡方程式(1)从电路角度对电机进行了电气阐释,而机械方程式(3)从力学角度描述了电机机械运动规律。
LSRM 机电联系方程从能量转化角度建立起电路方程和机械方程的连接。
一般地,功对距离的导数定义为力,由此可以推导,LSRM 一相绕组产生的瞬时电磁推力为:consti e xW F =∂′∂=(4)式(4)中 e F ――电机一相绕组产生的瞬时电磁推力,W ′――电机绕组的磁共能,∫∫==′ii idi i x L di W 0),(ψ (5)电机的出力和特性通常决定于平均电磁推力,对瞬时电磁推力在一个周期里积分并取平均值可得一相绕组平均电磁推力:∫=ττ1),(1dx i x F F e av (6)式(6)中 τ――相邻两个动子极间的距离,可以称为动子极距,1av F ――电机一相绕组平均电磁推力。
对于3相LSRM ,平均电磁推力为:13av av F F =∫=tedx i x F 0),(3τdx d xx L x i ξξξττ∫∫∂∂=0)(0),(3(7) 式(7)中 av F ――电机平均电磁推力, ξ――电机绕组相电流中间变量。
式(1)、(3)、(7)构成了LSRM 的数学模型,在理论上能够准确地描述电机电磁及力学关系,但是),(i x L 和)(x i 解析困难,在实际研究、应用过程中往往进行适当简化。
3基于径向基函数神经网络的LSRM 建模径向基函数神经网络属于前向网络的一种,它由输入层、输出层和隐层三层神经元组成,输入层节点只传递输入信号到隐层,隐层由像高斯函数那样的辐射状作用函数构成,而输出层节点通常是简单的线性函数[8][14]。
本文建立基于RBF NN 的),(x i ψ模型,网络的2个输入量分别为相电流i 和动子相对位置x ,输出量为磁链ψ,如图2所示。
图2 基于RBF 神经网络的()x i ,ψ模型示意图 Fig.2 Diagram of ()x i ,ψ Model Based on RBF NN将x i −−ψ先验知识输入建立的RBF NN),(x i ψ模型,经训练,建立起输入量i 、x 和输出量ψ之间的数学映射关系[15]。
图3所示为细化动子位置和相电流(相电流A i )20,0(∈)时的i x −−ψ三维示意图。
从图中可以看出,通过),(x i ψ网络模型可以求取给定范围内任意动子位置和相电流下的磁链值。
图3网络模型),(θψi i x −−ψ三维示意图Fig.3 Diagram of the Three-dimensional i −ψwith theModel of ),(θψi在所建立的),(x i ψ模型基础上,根据式(5)可得磁共能W ′。
与前面建立RBF NN ),(x i ψ模型相似,选择相电流i 和动子相对位置θ为网络输入,磁共能W ′作为输出,建立基于RBF NN 的()θ,'i W 模型,并由此根据式(4)可得转矩e T 。
图4所示为基于RBF NN 的),(x i W ′三维示意图。
图4 基于RBF NN 的),(x i W ′三维示意图 Fig. 4 Diagram of the Three-dimensional ()θ,'i W Basedon RBF NN根据所得的磁链和磁共能的数据,在MATLAB 环境下建立了仿真模型,如图5所示。
模型采用模块化结构,包括5个部分:位置计算、控制器、功率变换器、相绕组和转速计算。
本系统功率变换器结构为不对称半桥式,模型中采用功率器件MOSFET 和二极管来搭建系统的功率变换器,如图6,和函数编写的功率变换器相比,更接近系统的实际工作情况。
本系统采用了速度电流双闭环,使转速平稳可控。
图5 LSRM 系统仿真模型 Fig.5 Simulation Model of LSRMLSRM 的控制方法与SRM 类似,有电流斩波控制、角度控制以及电压PWM 控制。
本文选取的是电压PWM 控制,通过PI 调节器调节电压占空比,从而调节供电电压,最终实现调节转速的目的。
(a )电动状态(b) 发电状态 图6 功率变换器仿真模型 Fig.6 Simulation Models of Converters将式(2)代入式(1)整理可得相电流方程:jjjj j j j i vxi R u i ∂∂∂∂−−=ψψ (8)根据式(4)、(8)建立一相绕组仿真模型,如图7所示。
图7 一相绕组仿真模型Fig.7 Simulation Model of one phase of LSRM4 仿真结果为了简化模型,本系统假设次级导轨无限长,往返运动的情况暂不考虑。