侧方交会的精度分析
方位交会法在城区测量中的应用

建筑物遮挡:高楼林立的区域,建筑物遮挡严重,影响测量精度 信号干扰:高楼林立的区域,信号干扰严重,影响测量信号的接收和传输 测量设备限制:高楼林立的区域,测量设备受到限制,难以进行精确测量 测量时间限制:高楼林立的区域,测量时间受到限制,难以进行长时间测量
PART THREE
背景介绍:介绍城区测量的 背景和需求
智能化:随着人工智能和物联网技术的发 展,方位交会法在城区测量中的应用将更 加智能化,可以实现自动测量和实时监控。
环保与可持续发展:方位交会法在城区测 量中的应用将更加注重环保和可持续发展, 减少对环境的影响。
PART SIX
方位交会法在城区 测量中具有较高的 精度和可靠性
方位交会法在城区 测量中能够有效地 减少误差和偏差
环境监测:用于空气质量监测、噪声监 测等
智慧城市:用于智慧城市建设、管理、 服务等
科学研究:用于地理学、城市地理学等 学科的研究
技术进步:随着科技的发展,方位交会法 在城区测量中的应用将更加广泛和精确。
应用领域:方位交会法在城区测量中的 应用将不仅仅局限于传统的测量领域, 还将扩展到城市规划、交通管理等领域。
PART TWO
建筑物密集,遮挡视线
交通繁忙,影响测量精度
信号干扰,影响GPS定位
环境复杂,难以确定测量基准 点
建筑物遮挡:建筑物遮挡视线, 影响测量精度
信号干扰:建筑物密集区信号 干扰严重,影响测量信号接收
测量时间:建筑物密集区人流 量大,测量时间受限
测量精度:建筑物密集区地形 复杂,测量精度要求高
,a click to unlimited possibilities
汇报人:
CONTENTS
PART ONE
测边交会精度分析及在变形监测工作中的应用
测边交会精度分析及在变形监测工作中的应用作者:焦川川来源:《中国房地产业·下旬》2020年第08期【摘要】根据测边后方交会的原理和误差传播律,推导全站仪测边交会误差模型。
分析仪器精度、视距、角度等因素对架站点误差的影响,探讨提高变形监测精度的可行性。
【关键词】全站仪;边长测量;精度分析;交会角度变形监测工作中,常用的平面位移监测方法有视准线法、小角法、极坐标法等。
以上方法对基准点或工作基点稳定性或者场地通视条件要求较高,但是一般城区基坑监测受场地限制很难满足以上要求,如围挡临近基坑边、基坑边转折较多、基坑边机械施工、堆载物料等影响视线,均可能导致监测工作难以按计划进行。
此时若能根据现场条件合理采用测边交会测量,既能提高工作效率,又能保证测量精度。
1、两基准点测边交会坐标计算与精度分析测边后方交会用于变形监测工作时,通常需要在基坑变形影响区域外布置3-4个稳定的基准点。
通过测量架站点与基准点之间的距离,可以解算出仪器坐标。
仪器测量到两个基准点的边长是测边交会的最基本形式,现以这种形式进行分析。
如图1,A、B为基准点,坐标已知。
T为架站点,现场测量TA与TB的边长即可确定T 点坐标。
T点坐标计算公式如下:根据以上公式可知,测边交会误差与边长误差和夹角γ大小有关。
全站仪测距误差公式mL=±(a+b*L),目前常用的监测型全站仪固定误差a值在0.5-1.5mm范围内,比例误差b值在1-2ppm范围内。
根据常见基坑规模大小,交会法测量时,基准点到架站点的距离很少超过200m,此时比例误差影响相对较小。
实际测量时边长差异不大,不同边长测量误差基本一致。
公式(8)可近似表示为:(9)式中:L为平均边长。
当夹角γ在45°-135°范围内时,交汇点平面位置中误差变化不大。
且当夹角为90°时,点位精度最高。
以全站仪TCA1201+(测角精度1″,测距精度1mm+1.5ppm)为例,平均边长200m时,γ=90°时,交会点平面误差约为±1.8mm;γ=45°时交会点平面误差约为±2.6mm。
大数据时代测边后方交汇的计算公式及精度分析
大数据时代测边后方交汇的计算公式及精度分析摘要在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
基于此,本文就针对测边后方交汇的计算公式及精度进行分析研究。
关键词测边后方交汇;计算公式;精度分析前言由于测边后方交会定点具有布点灵活、施测方便、无须已知点之间互相通视且计算简便等优点,尤其在全站仪已普及应用的情况下,优点更为明显。
随着电子技术和计算机技术的发展,全站仪的测角和测距性能得到了很大程度的提高。
很多全站仪的测量、记录、数据预处理、显示等多种模块都向着智能化、集成化的方向发展,这样就大大减少了测设过程中的误差来源,提高了测量数据的精度。
1 测边后方交会定点的计算公式在实际的生产过程中,常常因工期紧,任务重,各项工作交叉进展,导致原有的测量控制点遭到不同程度的破坏,给施工测量工作带来了很大的困难。
例如两控制点不通视,在设备安装时某些部件上的控制点上只能放棱镜而不适宜架设仪器等情况。
以往为了解决工程测量中出现的这些问题,常用极坐标法、直角坐标法、无定向导线法等测设方法来确定加密点,这些方法不但工作量大,而且加密点往往达不到原有控制点的精度[1]。
而传统的后方交会方法是通过在加密点上观测3个已知方向的水平夹角来计算测站的平面坐标,它要求加密点不能位于由3个已知点构成的危险圆附近。
由于这些条件在城市工程测量中较难满足而限制了传统后方交会方法的使用。
为此,本文提出了测边后方交会方法。
它是通过在加密点P上安置全站仪,在已知点A、B上安置反射镜,通过测量水平距离P A、PB和水平角V,计算测站点的平面坐标。
与传统后方交会方法比较,测边后方交会只需要在加密点上观测附近任意两个已知点的水平距离和水平角就可以计算出测站点的坐标。
用误差椭圆分析交会法放样点位的精度

用误差椭圆分析交会法放样点位的精度测量在城市建设和规划中发挥着非常重要的作用,交会法放样点位是工程测量中常用的一种方法。
在充分考虑交会主要误差来源的基础上,用误差椭圆表示几种典型交会法下的点位误差分布,并对测角交会和测边交会进行了比较,通过分析得出不同交会方法对点位误差的影响规律和放样中应注意的问题。
标签测角交会;测边交会;误差椭圆概述随着社会主义改革开放的进一步深入,我国城市建设和规划的周期日益缩短。
在城市建设和规划过程中,测绘城市地形图和布设城市工程测量控制网是必不可少的工作。
以上测量工作中,经常用到以控制点为极点,以X轴为极轴,以极角和相应极径为变量的点位误差曲线。
点位误差曲线图的应用虽然很广泛,在它上面可以图解出控制点在各个方向上的位差,从而进行精度评定,但是它不是一种典型曲线,作图不太方便,因此降低了它的实用价值。
点位误差曲线总体形状与其相应的椭圆相似,通过一定的变通方法,可以用点位的误差椭圆代替误差曲线进行各类误差的量取[1],具体量取方法见参考文献1。
1 交会法放样点位在地形测量或工程测量中,当用图根网、图根锁或经纬仪导线测量的方法布设的图根控制点或工程控制点,尚不能满足大比例尺测图或工程放样的需要时,可以采用交会法作进一步的加密。
根据观测量的不同,交会法分为角度交会和距离交会,它在一定程度上提高了测量的效率。
在工程测量中,采用交会法放样点位是一种经常使用的方法。
通过对交会测量过程的分析,可以得到采用前方交会法放样点位时,放样点位的主要误差来源包括以下几个方面[3,4]:1.1 仪器本身及安置误差的影响在使用经纬仪或全站仪进行放样点位时,首先要在已知点上安置仪器,仪器在测站点上所造成的观测误差与仪器的安置精度有关,即仪器对中误差、整平误差势必影响放样点位的精度,例如整平时,圆水准气泡略偏一格,对中影响为5mm左右,所以在放样点位时,仪器应注意精确整平、仔细对中。
另外,还包含仪器本身的误差,如仪器的竖轴与水平度盘不垂直、水平轴与竖轴不垂直、视准轴与水准管轴不平行;仪器的标称中心与真实中心之间的差异;仪器照准部转动时,由于垂直轴和轴套表面的摩擦力,使仪器基座产生弹性扭转,和基座相连的水平度盘随之发生微小的方位变动,导致角度观测中方向观测读数产生误差;支承仪器基座的脚螺旋,其螺杆与螺母间有间隙,转动照准部时,螺杆在螺母内移动,带动了基座和水平度盘,使水平度盘产生微小的方位变动,也会导致角度观测中方向观测读数产生误差;仪器水平微动螺旋弹簧的弹力不足或油腻凝结,旋出水平微动螺旋照准目标时,弹簧不能迅速伸张,使微动螺旋杆和微动架之间出现空隙,在观测过程中,弹簧逐渐伸张把空隙消除,使视准轴离开照准目标,同样会对角度观测中方向观测读数带来误差。
边角交会设站的测设原理、精度分析及其在测量中的应用

高新技术2017年12期︱3︱边角交会设站的测设原理、精度分析及其在测量中的应用赖继文 雷和健湖南省地质测绘院,湖南 衡阳 421001摘要:在植被茂密的的谷地、严禁砍伐的风景区或封闭小区等的测量过程中,由于布设的控制点较少或由于控制点难以布设,通常会产生控制点间不通视而无法设站的情况。
本文介绍了一种旨在解决控制点间不通视情况的一种新的测站测设模式——“边角交会设站法”,并对其作业原理与精度进行了论证与分析;并介绍了其在测量过程中的应用方式。
关键词:边角交会设站;边角交会设站的测设原理;精度分析;自由设站;β(θ)角正负值的确定;投点法 中图分类号:P237 文献标识码:B 文章编号:1006-8465(2017)12-0003-03引言 在测量过程中,特别是在较小面积的工程测量过程中,由于周边环境的变化——如建(构)筑物的新建、植被的生长等或在地形条件限制区域——如植被茂密的的谷地、严禁砍伐的风景区或封闭小区等的测量过程中,由于布设的控制点较少或由于控制点难以布设,通常会产生控制点间不通视而无法设站的情况。
对此,大多数作业人员通常采用“自由设站”的方式进行作业予以解决。
然而采用“自由设站”方式进行作业时会存在如下几方面的缺陷: (1)重合点的平面误差会应其距测站的远近而有所不同,从而产生误差配赋的不一致性,严重时甚至会无法配赋而只能重测; (2)重合点的高程误差的评估会因其最或是值的计算而产生失真,由偶然误差而转化为系统误差; (3)采用多次“自由设站”时,其各测站的参数存在差异,其图形需分片处理与接边,效率低下且不确定性因素较多;(4)由于上述三个原因的存在,制约了“自由设站”作业方式的发展递次,因而当存在大片如前所述区域时,因其作业方式的局限性而显得无能为力。
针对上述情况,本人在实际生产管理与作业过程中,采用了“边角交会设站”的作业方式进行作业,较好地解决了此类问题。
本文将就“边角交会设站”的测设原理及其在测量中的应用方法进行粗浅探讨。
测绘技术中常见的误差和精度分析方法

测绘技术中常见的误差和精度分析方法随着科技的发展与普及,测绘技术在各个领域的应用越来越广泛。
无论是地理信息系统、土地利用规划还是城市规划设计,测绘技术都发挥着重要的作用。
然而,在实际应用中,我们往往会遇到各种误差和精确度问题,影响着测绘成果的真实性和可靠性。
因此,对误差和精度进行详细的分析和研究,是保证测绘成果准确性的重要环节。
首先,我们来了解一下常见的误差类型。
在测绘过程中,系统性误差和随机误差是两种主要的误差类型。
系统性误差是由于测量系统本身的缺陷、不完善或漂移引起的。
这种误差在每次测量中都有固定的偏差,且偏差方向始终保持一致。
系统性误差的存在会导致测绘结果的整体偏离真实值。
随机误差则是由于各种随机因素的干扰造成的。
随机误差的特点是在不同的测量过程中,每次的误差大小和方向都是随机分布的,没有固定的规律。
由于随机误差的随机性,可以通过多次测量取平均值的方法来消除。
了解误差类型后,我们需要通过精度分析来评估测绘成果的准确性。
精度分析是通过对测量结果的误差幅度和分布进行统计,从而确定测绘成果的精度水平。
在精度分析中,常用的方法包括绝对精度评定和相对精度评定两种。
绝对精度评定是通过与实际控制点或参考数据进行比较,确定测绘成果的误差范围。
这种方法适用于绝对位置精度的要求较高的测绘任务,如航空摄影测量和全球定位系统。
相对精度评定则是通过对测量数据的内部误差进行统计,得到测绘成果相对于自身的精度水平。
这种方法适用于相对位置精度要求较高的测绘任务,如地形图绘制和道路测量。
除了绝对精度评定和相对精度评定,还有一种常用的精度评定方法是检核点比例估计。
这种方法通过在整个测绘区域选取一定数量的检核点,分析其测量结果与真实值之间的差异,推断整个测绘区域的误差范围和精度水平。
在进行精度分析时,我们还需要根据具体的误差特点选择合适的统计方法。
常见的统计方法包括均值、标准差和方差分析等。
均值可以用来表示测量数据的集中程度,即数据的平均水平。
两点边角后方交会计算方法及精度评定
可化作:
$A =
-
Q(
Sb- SccosA ) Sb Sc sinA
VS
-
b
Q(
Sc S
- SbcosA bScsinA
)
V
S
c
(
2
)
设 V A 为观测角 A 的平差改正数, 则下式应成立:
Ac+ $A= A + V A
将( 2) 式代入上式, 并设 A- Ac= W 得:
Q(
Sb- SccosA) Sb S csin A
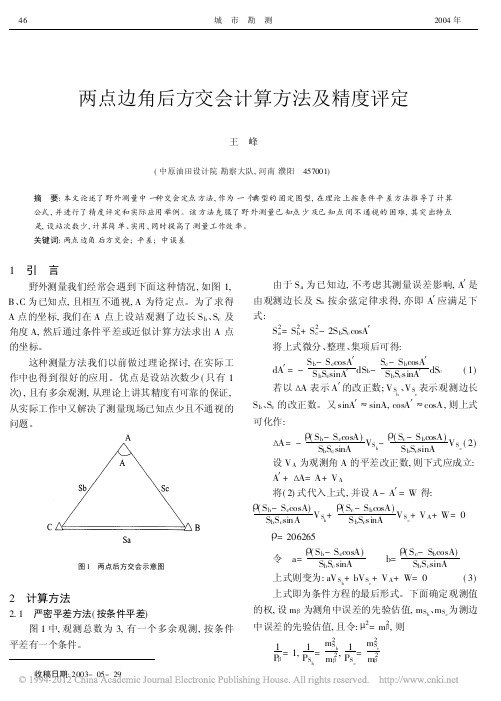
1引言
野外测量我们经常会遇到下面这种情况, 如图 1, B、C 为已知点, 且相互不通视, A 为待定点。为了求得 A 点的坐标, 我们在 A 点上设站观测了边长 Sb、Sc 及 角度 A, 然后通过条件平差或近似计算方法求出 A 点 的坐标。
这种测量方法我们以前做过理论探讨, 在实际工 作中也得到很好的应用。优点是设站次数少 ( 只有 1 次) , 且有多余观测, 从理论上讲其精度有可靠的保证, 从实际工作中又解决了测量现场已知点少且不通视的 问题。
将上式微分、集项, 整理后得
dBc=
S
Q#Sb aSc sin
Bc(
dS
b-
dSccosA )
因 SasinBc= SbsinA, 代入上式得
dBc=
S
Q csin
A
(
dSb
-
dS ccosA)
=
S
Q csin
A
dSb-
QcosA S csinA
dSc
按误差传播定律可得
48
城市勘测
2004 年
m2Bc=
Sb= 1086. 0079
测边交会及精度评定
线 AB 上。此时 sign 取 1 或-1 对 P 点坐标的计算是没有区别的。
1.4 计算公式二
xP xA AP cos( AB A sign)
xA AP cos AB cos A sign sin AB sin A sign
xA
AP AB
A
sign xB
xA sin
A
把 cos A AB2 AP2 BP2 和 S 1 AB AP sin A sin A 2S 代入上
2 AB AP
2
AB AP
3
第 1 章 计算公式
面两个公式,可得
xP
xA
AP AB
xB