Noise Reduction by Fuzzy Image Filtering
数码相机专业词汇
Accessories (附/配件)Anti-shake (防抖)Aperture (光圈)Aperture priority (光圈优先)Auto bracketing (自动包围)Auto focus (自动对焦)Auto rotation (自动旋转)Background (背景)Backlit (背光的)背光的主体(backlit subject)Battery grip (电池手托)Built-in flash (内置闪光灯)Composition (构图)Depth of field (DOF) (景深)Digital zoom (数码变焦)SLR (单反相机)DSLR (数码单反相机)Effective pixels (有效像素)Exposure (曝光)Exposure compensation (曝光补偿)Electromagnetic diaphragm (EMD) 电磁光圈External speedlite (外置闪光灯)Film (胶卷,菲林)Filter (滤光镜)Focus (对焦)对焦环(focusing ring)自动对焦(auto-focusing)Foreground (前景)Full frame (全幅/全片幅)Full pressing (全按)Halfway pressing (半按)High key (高调/亮调)Histogram (光暗分布图)Hood (遮光罩)Image stabilization (成像稳定)Image stabilizer (IS) (成像稳定系统/器) LCD monitor (液晶显示器)Lens (镜片/头)自动对焦镜头(auto-focusing lens)标准镜头(standard lens)标准变焦镜头(standard zoom lens)超广角变焦镜头(ultra wide lens)中距远摄镜头(medium telephoto lens)远摄变焦镜头(telephoto zoom lens) 远摄镜头(telephoto lens)超远摄镜头(super telephoto lens)微距镜头(macro lens)移轴镜头(tilt and shift lens)Light(光)低光/暗光(low light)Lighting (用光)Low key(低调/暗调)Macro (微距)Manual (手动)Metering (测光)矩阵/评估测光(matrix / evaluative metering)中央权重平均测光(center-weighted average metering)点测光(spot (partial) metering)Noise reduction (减噪)Optical zoom (光学变焦)Photographer(摄影者/家)Photography (摄影)文献摄影(documentary photography)艺术摄影(fine art photography)风光摄影(landscape photography)裸体摄影(nude photography)扫街摄影(street photography)肖像摄影(portrait photography)Picture angle (图像对角)Playback (回放显示)Red-eye reduction (红眼消除)Remote switch (遥控开关)Sensitivity (ISO) (感光度)Sensor (感光器/芯片)Setting (设置)Shape (形状)Sharpening (锐度)Shutter (快门)快门按钮(shutter button)Shutter priority (快门优先)Shutterspeed (快门速度)Subject (拍摄主体)Subject distance (主体距离)Texture (质地,质感)Tripod (三脚架)Viewfinder (取景器)Ultrasonic Motor (USM) (超声波马达)White balance (白平衡)Wide (广角)Zoom (变焦)变焦环(zoom ring)相机英文词汇大全(字母序)AAberration 像差Accessory 附件Accessory Shoes 附件插座、热靴Achromatic 消色差的Active 主动的、有源的Acutance 锐度Acute-matte 磨砂毛玻璃Adapter 适配器Advance system 输片系统AE Lock(AEL) 自动曝光锁定AF(Autofocus) 自动聚焦AF Illuminator AF照明器AF spotbeam projector AF照明器Alkaline 碱性Ambient light 环境光Amplification factor 放大倍率Angle finder 弯角取景器Angle of view 视角Anti-Red-eye 防红眼Aperture 光圈Aperture priority 光圈优先APO(APOchromat) 复消色差APZ(Advanced Program zoom) 高级程序变焦Arc 弧形ASA(American Standards Association) 美国标准协会Astigmatism 像散Auto bracket 自动包围Auto composition 自动构图Auto exposure 自动曝光Auto exposure bracketing 自动包围曝光Auto film advance 自动进片Auto flash 自动闪光Auto loading 自动装片Auto multi-program 自动多程序Auto rewind 自动退片Auto wind 自动卷片Auto zoom 自动变焦Automatic exposure(AE) 自动曝光Automation 自动化Auxiliary 辅助的BBack 机背Back light 逆光、背光Back light compensation 逆光补偿Background 背景Balance contrast 反差平衡Bar code system 条形码系统Barrel distortion 桶形畸变BAse-Stored Image Sensor (BASIS) 基存储影像传感器Battery check 电池检测Battery holder 电池手柄Bayonet 卡口Bellows 皮腔Blue filter 蓝色滤光镜Body-integral 机身一体化Bridge camera 桥梁相机Brightness control 亮度控制Built in 内置Bulb B 门Button 按钮CCable release 快门线Camera 照相机Camera shake 相机抖动Cap 盖子Caption 贺辞、祝辞、字幕Card 卡Cartridges 暗盒Case 机套CCD(Charge Coupled Device) 电荷耦合器件CdS cell 硫化镉元件Center spot 中空滤光镜Center weighted averaging 中央重点加权平均Chromatic Aberration 色差Circle of confusion 弥散圆Close-up 近摄Coated 镀膜Compact camera 袖珍相机Composition 构图Compound lens 复合透镜Computer 计算机Contact 触点Continuous advance 连续进片Continuous autofocus 连续自动聚焦Contrast 反差、对比Convetor 转换器Coreless 无线圈Correction 校正Coupler 耦合器Coverage 覆盖范围CPU(Central Processing Unit) 中央处理器Creative expansion card 艺术创作软件卡Cross 交叉Curtain 帘幕Customized function 用户自选功能DData back 数据机背Data panel 数据面板Dedicated flash 专用闪光灯Definition 清晰度Delay 延迟、延时Depth of field 景深Depth of field preview 景深预测Detection 检测Diaphragm 光阑Diffuse 柔光Diffusers 柔光镜DIN (Deutsche Industrische Normen) 德国工业标准Diopter 屈光度Dispersion 色散Display 显示Distortion 畸变Double exposure 双重曝光Double ring zoom 双环式变焦镜头Dreams filter 梦幻滤光镜Drive mode 驱动方式Duration of flash 闪光持续时间DX-code DX编码EED(Extra low Dispersion)超低色散Electro selective pattern(ESP)电子选择模式EOS(Electronic Optical System) 电子光学系统Ergonomic人体工程学EV(Exposure value)曝光值Evaluative metering综合评价测光Expert专家、专业Exposure曝光Exposure adjustment曝光调整Exposure compensation曝光补偿Exposure memory曝光记忆Exposure mode曝光方式Exposure value(EV)曝光值Extension tube近摄接圈Extension ring近摄接圈External metering外测光Extra wide angle lens超广角镜头Eye-level fixed眼平固定Eye-start眼启动Eyepiece目镜Eyesight correction lenses视力校正镜FField curvature 像场弯曲Fill in 填充(式)Film 胶卷(片)Film speed 胶卷感光度Film transport 输片、过片Filter 滤光镜Finder 取景器First curtain 前帘、第一帘幕Fish eye lens 鱼眼镜头Flare 耀斑、眩光Flash 闪光灯、闪光Flash range 闪光范围Flash ready 闪光灯充电完毕Flexible program 柔性程序Focal length 焦距Focal plane 焦点平面Focus 焦点Focus area 聚焦区域Focus hold 焦点锁定Focus lock 焦点锁定Focus prediction 焦点预测Focus priority 焦点优先Focus screen 聚焦屏Focus tracking 焦点跟踪Focusing 聚焦、对焦、调焦Focusing stages 聚焦级数Fog filter 雾化滤光镜Foreground 前景Frame 张数、帧Freeze 冻结、凝固Fresnel lens 菲涅尔透镜、环状透镜Frontground 前景Fuzzy logic 模糊逻辑GGlare 眩光GN(Guide Number) 闪光指数GPD(Gallium Photo Diode) 稼光电二极管Graduated 渐变HHalf frame 半幅Halfway 半程Hand grip 手柄High eye point 远视点、高眼点High key 高调Highlight 高光、高亮Highlight control 高光控制High speed 高速Honeycomb metering 蜂巢式测光Horizontal 水平Hot shoe 热靴、附件插座Hybrid camera 混合相机Hyper manual 超手动Hyper program 超程序Hyperfocal 超焦距IIC(Integrated Circuit) 集成电路Illumination angle 照明角度Illuminator 照明器Image control 影像控制Image size lock 影像放大倍率锁定Infinity 无限远、无穷远Infra-red(IR) 红外线Instant return 瞬回式Integrated 集成Intelligence 智能化Intelligent power zoom 智能化电动变焦Interactive function 交互式功能Interchangeable 可更换Internal focusing 内调焦Interval shooting 间隔拍摄ISO(International Standard Association) 国际标准化组织JJIS(Japanese Industrial Standards)日本工业标准LLandscape 风景Latitude 宽容度LCD data panel LCD数据面板LCD(Liquid Crystal Display) 液晶显示LED(Light Emitting Diode) 发光二极管Lens 镜头、透镜Lens cap 镜头盖Lens hood 镜头遮光罩Lens release 镜头释放钮Lithium battery 锂电池Lock 闭锁、锁定Low key 低调Low light 低亮度、低光LSI(Large Scale Integrated) 大规模集成MMacro微距、巨像Magnification放大倍率Main switch主开关Manual手动Manual exposure手动曝光Manual focusing手动聚焦Matrix metering矩阵式测光Maximum最大Metered manual测光手动Metering测光Micro prism微棱Minimum最小Mirage倒影镜Mirror反光镜Mirror box反光镜箱Mirror lens 折反射镜头Module模块Monitor监视、监视器Monopod独脚架Motor电动机、马达Mount卡口MTF (Modulation Transfer Function调制传递函数Multi beam多束Multi control多重控制Multi-dimensional多维Multi-exposure多重曝光Multi-image多重影Multi-mode多模式Multi-pattern多区、多分区、多模式Multi-program多程序Multi sensor多传感器、多感光元件Multi spot metering多点测光Multi task多任务NNegative 负片Neutral 中性Neutral density filter 中灰密度滤光镜Ni-Cd battery 镍铬(可充电)电池OOff camera 离机Off center 偏离中心OTF(Off The Film) 偏离胶卷平面One ring zoom 单环式变焦镜头One touch 单环式Orange filter 橙色滤光镜Over exposure 曝光过度PPanning 摇拍Panorama 全景Parallel 平行Parallax 平行视差Partial metering 局部测光Passive 被动的、无源的Pastels filter 水粉滤光镜PC(Perspective Control) 透视控制Pentaprism 五棱镜Perspective 透视的Phase detection 相位检测Photography 摄影Pincushion distortion 枕形畸变Plane of focus 焦点平面Point of view 视点Polarizing 偏振、偏光Polarizer 偏振镜Portrait 人像、肖像Power 电源、功率、电动Power focus 电动聚焦Power zoom 电动变焦Predictive 预测Predictive focus control 预测焦点控制Preflash 预闪Professional 专业的Program 程序Program back 程序机背Program flash 程序闪光Program reset 程序复位Program shift 程序偏移Programmed Image Control (PIC) 程序化影像控制QQuartz data back 石英数据机背RRainbows filter 彩虹滤光镜Range finder 测距取景器Release priority 释放优先Rear curtain 后帘Reciprocity failure 倒易律失效Reciprocity Law 倒易律Recompose 重新构图Red eye 红眼Red eye reduction 红眼减少Reflector 反射器、反光板Reflex 反光Remote control terminal 快门线插孔Remote cord 遥控线、快门线Resolution 分辨率Reversal films 反转胶片Rewind 退卷Ring flash 环形闪光灯ROM(Read Only Memory) 只读存储器Rotating zoom 旋转式变焦镜头RTF(Retractable TTL Flash) 可收缩TTL闪光灯SSecond curtain 后帘、第二帘幕Secondary Imaged Registration(SIR) 辅助影像重合Segment 段、区Selection 选择Self-timer 自拍机Sensitivity 灵敏度Sensitivity range 灵敏度范围Sensor 传感器Separator lens 分离镜片Sepia filter 褐色滤光镜Sequence zoom shooting 顺序变焦拍摄Sequential shoot 顺序拍摄Servo autofocus 伺服自动聚焦Setting 设置Shadow 阴影、暗位Shadow control 阴影控制Sharpness 清晰度Shift 偏移、移动Shutter 快门Shutter curtain 快门帘幕Shutter priority 快门优先Shutter release 快门释放Shutter speed 快门速度Shutter speed priority 快门速度优先Silhouette 剪影Single frame advance 单张进片Single shot autofocus 单次自动聚焦Skylight filter 天光滤光镜Slide film 幻灯胶片Slow speed synchronization 慢速同步SLD(Super Lower Dispersion) 超低色散SLR(Single Lens Reflex) 单镜头反光照相机SMC(Super Multi Coated) 超级多层镀膜Soft focus 柔焦、柔光SP(Super Performance) 超级性能SPC(Silicon Photo Cell) 硅光电池SPD(Silicon Photo Dioxide) 硅光电二极管Speedlight 闪光灯、闪光管Split image 裂像Sport 体育、运动Spot metering 点测光Standard 标准Standard lens 标准镜头Starburst 星光镜Stop 档Synchronization 同步TTele converter增距镜、望远变换器Telephoto lens长焦距镜头Trailing-shutter curtain后帘同步Trap focus陷阱聚焦Tripod三脚架TS(Tilt and Shift)倾斜及偏移TTL flashTTL闪光TTL flash metering TTL闪光测光TTL(Through The Lens)通过镜头、镜后Two touch双环UUD(Ultra-low Dispersion) 超低色散Ultra wide 超阔、超广Ultrasonic 超声波UV(Ultra-Violet) 紫外线Under exposure 曝光不足VVari-colour 变色Var-program 变程序Variable speed 变速Vertical 垂直Vertical traverse 纵走式View finder 取景器WWarm tone 暖色调Wide angle lens 广角镜头Wide view 广角预视、宽区预视Wildlife 野生动物Wireless remote 无线遥控World time 世界时间XX-sync X-同步ZZoom 变焦Zoom lens 变焦镜头Zoom clip 变焦剪裁Zoom effect 变焦效果其他:TTL 镜后测光NTTL 非镜后测光UM 无机内测光,手动测光MM 机内测光,但需手动设定AP 光圈优先SP 快门优先PR 程序暴光。
【最新精选】《数字图像处理》结课小论文题目汇总及要求

《数字图像处理》结课测试题目题目的路径:首先在Matlab的Command window中键入“demo”,进入demo 窗口。
然后在树形选择框中选择“Toolboxes\Image Processing”和“Blocksets\ Video and Image Processing”。
最后逐个查看并选择自己感兴趣的题目。
所有题目汇总如下:图像去模糊1. Deblurring Images Using the Blind Deconvolution Algorithm基于盲解卷算法的图像去模糊2. Deblurring Images Using the Lucy-Richardson Algorithm使用LR算法进行图像去模糊3. Deblurring Images Using a Regularized Filter使用正则滤波器进行图像去模糊4. Deblurring Images Using the Wiener Filter使用维纳滤波器进行图像去模糊图像增强5. Contrast Enhancement Techniques图像对比度增强技术6. Correcting Nonuniform Illumination如何对不均匀光照进行校正7. Enhancing Multispectral Color Composite Images多谱(卫星遥感) 图像增强技术图像配准8. Finding the Rotation and Scale of a Distorted Image计算失真图像的旋转参数和尺度参数9. Registering an Aerial Photo to an Orthophoto基于控制点的多幅航拍图像的配准10. Registering an Image Using Normalized Cross-Correlation使用归一化交叉相关法来配准图像图像分割11. Batch Processing Image Files Using Distributed Computing分布式计算对图像序列进行批处理12. Color-Based Segmentation Using the L*a*b* Color Space基于Lab色彩空间的彩色图像分割13. Color-Based Segmentation Using K-Means Clustering 基于K-均值聚类的彩色图像分割14. Detecting a Cell Using Image Segmentation使用图像分割技术来检测细胞15. Finding V egetation in a Multispectral Image多谱图像(卫星遥感)上的农作物区域分割16. Marker-Controlled Watershed Segmentation基于标记控制的分水岭分割算法17. Texture Segmentation Using Texture Filters基于纹理滤波器的纹理图像分割图像几何变换18. Creating a Gallery of Transformed Images常见的图像几何变换简介19. Exploring a Conformal Mapping图像的保角变换(共形映射)20. Extracting Slices from a 3-Dimensional MRI Data Set 如何从3维MRI数据集中提取切片图21. Padding and Shearing an Image Simultaneously图像的剪切变换和填充操作图像的测量22. Finding the Length of a Pendulum in Motion从单摆图像序列中计算摆长23. Granulometry of Snowflakes使用形态学方法对雪花的颗粒度进行测量24. Identifying Round Objects在图像中计算物体的“似圆度”25. Measuring Angle of Intersection在图像中计算钢梁的交叉角度26. Measuring the Radius of a Roll of Tape如何用图像方法测量胶带的半径图像的Radon变换27. Reconstructing an Image from Projection Data基于拉东(Radon)变换的CT图像重建视频检测和跟踪28. Abandoned Object Detection遗弃物体检测技术29. Motion Detection基于SAD的运动检测系统30. Lane Departure Warning System车道偏离预警系统31. Lane Detection and Tracking基于Hough变换的车道检测和跟踪32. Traffic Warning Sign Recognition交通警示牌自动识别技术33. People Tracking基于背景差分的行人检测技术34. Color Segmentation基于色彩分割的人体检测35. Tracking Cars Using Background Estimation 基于背景估计的汽车检测36. Tracking Cars Using Optical Flow基于光流法的汽车检测37. Surveillance Recording基于主帧检测的监控记录技术38. Pattern Matching基于模板匹配的PCB检测系统压缩技术39. V ideo Compression基于DCT变换的视频压缩技术40. Image Compression基于DCT变换的图像压缩技术视频分析技术41. Histogram Display图像直方图的实时显示42. Concentricity Inspection光纤的同心性检测系统43. Edge Detection边缘检测技术简介44. V ideo Focus Assessment视频自动聚焦参量计算视频增强45. V ideo Stabilization基于模板的电子稳像技术46. Periodic Noise Reduction针对周期噪声的图像降噪算法47. Histogram Equalization基于直方图均衡的图像增强48. Rotation Correction基于Hough变换的旋转图像校正基于形态学的视频分割技术49. Cell Counting细胞自动计数系统50. Feature Extraction如何自动计算视频中扇形的数目51. Object Counting如何自动计算订书钉的数目52. Object Extraction and Replacement视频目标的实时提取和替换视频回放处理53. Continuous Image Rotation图像连续旋转效果的实现54. Projecting Videos onto a Rotating Cube 如何将视频投影到旋转的立方体上55. V isual Effects图像浮雕效果的实现56. Picture in Picture画中画效果的实现57. Panorama Creation全景照片技术58. Bouncing Balls如何在图像上叠加动画《数字图像处理》结课测试报告规范1.内容要求(1)本报告(论文)的名字,系统功能、实现了什么结果。
基于深度学习的图像去噪技术优化研究

基于深度学习的图像去噪技术优化研究IntroductionWith the increasing use of digital images in various fields including healthcare, security, telecommunication, and robotics, the task of image denoising has become essential. Image denoising refers to the process of removing the noise component from an image to obtain a clear and enhanced version. One of the most popular approaches to image denoising is the use of deep learning techniques. This article explores the optimization of image denoising techniques using deep learning.Image Denoising TechniquesThere are various image denoising techniques that have been developed over the years. These techniques range from traditional statistical approaches to more advanced deep learning methods. Traditional methods include median filtering, Wiener filtering, and wavelet-based approaches. However, these methods are not effective in removing complex noise patterns such as non-uniform noise and they tend to blur image details.Deep Learning techniques for Image DenoisingRecently, deep learning techniques have emerged as a powerful approach for image denoising due to their ability to learn complex patterns in data. Deep learning methods for image denoising can be broadly classified as unsupervised, supervised, and semi-supervised.Unsupervised learning methods utilize autoencoder models to learn the image representation without the use of labeled data. Whereas, supervised learning involves training the network with labeled data. Semi-supervised techniques combine supervised and unsupervised learning methods.Optimization of Deep Learning Techniques for Image DenoisingOne of the most challenging aspects of using deep learning methods for image denoising is optimizing the network to achieve maximum performance. Optimization involves fine-tuning the hyperparameters of the network including learning rate, batch size, and number of hidden layers. The choice of hyperparameters is a critical factor that determines the success of the network. Optimal hyperparameters can help improve the accuracy of the network and reduce the error margin.In recent years, several techniques have been proposed to optimize the performance of deep learning models for image denoising. These techniques include:1. Incorporation of data augmentation techniques such as rotation, flipping, and zooming to increase the size of the training dataset.2. The use of ensemble techniques to combine the results of multiple models to enhance the prediction accuracy.3. Fine-tuning of pre-trained models to improve the accuracy of the network.4. The use of non-linear activation functions such as Rectified Linear Units (ReLU) and leaky ReLU to improve the convergence speed of the network.5. The implementation of regularization techniques such as dropout to reduce overfitting of the network.Advantages of Deep Learning Techniques for Image DenoisingDeep learning techniques have several advantages over traditional methods for image denoising. These advantages include:1. Ability to learn complex representations of data.2. High accuracy in handling complex noise patterns.3. Reduced computation time due to parallel processing of data.4. Better generalization ability compared to traditional methods.ConclusionIn conclusion, deep learning techniques provide a powerful approach for image denoising. The optimization of these techniques is necessary for improving the accuracy of the network and reducing the error margin. Several optimization techniques have been proposed to enhance the performance of deep learning models for image denoising. These techniques include data augmentation, ensemble techniques, fine-tuning of pre-trained models, and regularization techniques. Withthese techniques, deep learning methods are becoming the preferred approach for image denoising in various applications.。
遥感erdas界面翻译

一、主页(一)Information1、ContentsContentsRetrieverGeocoder2、MetadataView/Edit Image Metadata View/Edit Point Cloud Metadata View/Edit Vector Metadata View/Edit Annotation Metadata View/Edit NITF MetadataView/Edit IMAGINE HFAEdit Image Metadata3、SelectSelectSelect by BoxSelect by LineSelect by EllipseSelect by PolygonFollow HyperlinksSelector PropertiesPick Properties4、InquireInquire BoxInquire ShapeInquire Color5、MeasureMeasure(二)Edit1、Cut2、Copy3、Paste4、Delete5、Undo6、Paste From Selected Object (三)Extent1、Fit to Frame2、ResetReset (一)信息内容:内容检索地理编码元数据:查看/编辑影像元数据查看/编辑点云元数据查看/编辑矢量元数据查看/编辑注记元数据查看NITF元数据查看IMAGINE HFA文件内容元数据编辑选择:选择通过拉框选择通过画线选择通过画椭圆选择通过画多边形选择跟踪超链接选择器属性采集器属性查询:查询框查询光标形状查询光标颜色测量:测量(二)编辑剪切复制粘贴删除撤销由选中内容粘贴(三)内容全景显示重置:重置(七)Roam1、HorizontalHorizontalVerticalUser-Defined2、Speed Down3、Speed4、Speed UpSpeed UpSpeed Reset5、Go to Start6、Step Backwards7、Reverse8、Stop9、Start/Pause10、Step Forwards11、Go to End12、Snail TrailSnail TrailMerge Snail Trails13、Roam Properties(七)漫游水平:水平垂直自定义减速速度加速:加速重置速度从头开始快退倒退停止开始/暂停快进到最后追踪:追踪合并追踪漫游属性二、Manage Data管理数据(一)Catalog1、Hexagon ContentHexagon ContentImage Catalog(二)Conversion1、Coordinate Calculator2、Import Data3、Export Data4、GeoMedia ToolsShapefiles to WarehouseWarehouse to ShapefilesGeoMedia Utilities5、Pixels To ASC||6、ASC|| to Pixels7、Graphical Importer(一)目录海克斯康内容:海克斯康内容影像目录(二)转换坐标计算器数据导入数据导出空间数据仓库工具:Shp转仓库仓库转Shp空间数据仓库工具栅格转文本文本转栅格GeoRaster导入器8、GeoRaster Manager9、Imagizer Data Prep(三)VectorizeRaster to Shape to Shape to Annotation (四)Rasterize1、Vector to RasterVector to RasterAnnotation to Raster(五)Image1、Edit Image Metadata2、Pyramids &StatisticsCompute Pyramids and Statistics Create ThumbnailsProcess Footprints and RSETS3、Compare Images4、Create New Image5、Create ECW Transparency(六)NITF/NSIF1、NITFView NITF MetadataExtract Shape LASDPPDB WorkstationMake RPF TOCCIB JPEG 2000 ExporterRPF Frame SearchMake ECRG/ECIB TOCECRG/ECIB Frame Search(七)Office Tools1、Send to PowerPoint2、Send to Word3、Send to GeoPDF4、Send to JPEG GeoRaster管理器IMAGIZER数据预处理(三)矢量化栅格转shp:栅格转shp栅格转注记(四)栅格化矢量转栅格:矢量转栅格注记转栅格(五)影像编辑元数据金字塔和统计:计算金字塔和统计创建缩略图处理范围线和金字塔影像比较创建新影像创建ECW透明度(六)NITF/NSIFNITF:查看NITF元数据提取Shp文件提取LAS文件合并数字式目标定位数据库工作站生成影像目录CIB JPEG 2000输出RPF帧搜索制作ECRG/ECIB目录表ECRG/ECIB帧搜索(七)Office工具发送到PPT发送到Word发送到GeoPDF发送到JPEG三、Raster栅格(一)Resolution (一)分辨率·Two Layer Union Operators Zonal AttributesMatrix UnionSummary Report of Matrix Overlay by Min or Max Index by Weighted Sum (七)Scientific1、FunctionsTwo Image Functions Single Image Functions2、Fourier Analysis Fourier TransformFourier Transform Editor Inverse Fourier Transform Fourier Magnitude ·双层联合计算区域分析矩阵分析归纳分析叠加分析加权分析(七)科学的函数分析:两个影像函数单个影像函数傅里叶分析:傅里叶变换傅里叶变换编辑傅里叶逆变换傅里叶幅值计算四、Vector矢量(一)Manage1、Copy Vector Layer2、Rename Vector Layer3、Delete Vector Layer4、Buffer Analysis5、Attribute to Annotation(二)ER Mapper Vector to Shape 1、Reproject Shape Shape Elevation (三)Raster To VectorRaster to Shapefile (一)管理复制矢量重命名矢量删除矢量缓冲区分析属性转注记ER映射矢量转Shp Shape重投影Shp裁切高程重投影(二)栅格转矢量栅格转Shp五、Terrain地形(一)Manage (一)管理六、Toolbox工具箱(一)Common1、IMAGINE Photogrammetry2、Image Equalizer3、Spatial Model Editor Spatial Model EditorLaunch Spatial Model4、Model MakerModel MakerModel Librarian5、MosaicMosaicProMosaicPro from 2D View Mosaic ExpressUnchip NITF6、AutoSync Workstation AutoSync Workstation Georeferencing wizardEdge Match WizardOpen AutoSync Project7、Stereo AnalystStereo AnalystAuto-Texturize from Block Texel MapperExport 3D shape KML Extended Features to Ground 8、MapsMap Series ToolMap Database ToolEdit Composition Paths9、VirtualGISVirtual World EditorCreate MovieRecord Flight Path with GPS Create TIN Mesh (一)通用图像摄影测量影像匀光器空间模型编辑器:空间模型编辑器发射空间模型空间建模:空间建模模型库管理影像镶嵌:启动专业镶嵌镶嵌视窗显示影像镶嵌快车合并自动配准:自动配准地理参考向导边缘匹配向导打开自动配准工程立体分析:立体分析自动纹理纹理编辑器输出Shp为KML构建地面实体地图工具:图幅地图地图数据库工具修改制图文件路径虚拟GIS:虚拟世界编辑器录像录制通过GPS点定义飞行路径建立不规则三角网七、Help帮助(一)Reference Library1、Help2、About IMAGINE3、Reference booksHexGeoWiki4、WorkflowsCommon WorkflowsSpatial Modeler WorkflowsClassification WorkflowsPhotogrammetry WorkflowsPoint Cloud WorkflowsZonal Change WorkflowsRectification WorkflowsMap Making WorkflowsMosaic WorkflowsVector WorkflowsModel Maker WorkflowsNITF Workflows5、User GuidesAAIC User GuideAutonomous Spectral Image Processing User GuideAutoSync User GuideDeltaCue User GuideHyperspectral User GuideIMAGINE Objective User GuideIMAGIZER Data Prep User GuideIMAGIZER Viewer User Guide Photogrammetry Suite Contents Operational Radar User GuideRader InterferometryStereo Analyst User GuideSubpixel Classifier User GuideVirtual GIS User GuideInstallation and Configuration Guide6、Spatial ModelingSpatial Model EditorModel Maker(Legacy) (一)相关阅览帮助关于IMAGINE参考书:希格维基工作流:常见工作流空间建模器工作流分类工作流摄影测量工作流点云工作流分区变化工作流整流工作流地图制图工作流镶嵌工作流矢量工作流模型制作工作流NITF工作流使用指南:AAIC使用指南自主光谱图像处理用户指南自动配准使用指南变化检测使用指南高光谱使用指南IMAGINE面向对象使用指南IMAGIZER数据准备使用指南IMAGIZER视窗使用指南摄影测量套件目录操作雷达用户指南雷达干涉立体分析使用指南子像元分类使用指南虚拟GIS使用指南安装与配置指南空间建模:空间模型编辑器模型制作者(Legacy)Spatial Modeler Language(Legacy)Graphical Models Reference Guide7、Language ReferenceERDAS Macro Language8、Release NotesERDAS IMAGINE Issues ResolvedAutonomous Spectral Image ProcessingRelease Notes9、ERDAS IMAGINE Release Notes(二)Search Commands1、Search2、Search Box(三)Page1、Previous2、Next空间建模语言(Legacy)图估模型的参考指南建模和定制:ERDAS宏语言发布说明:ERDAS IMAGINE问题解决自主光谱图像处理发布说明ERDAS IMAGINE发行说明(二)搜索命令搜索搜索框(三)页码向前向后八、Multispectral(一)Enhancement1、Adjust RadiometryGeneral ContrastBrightness/ContrastPhotography EnhancementsPiecewise ContrastBreakpointsLoad BreakpointsSave BreakpointsData Scaling2、Discrete DRADiscrete DRADRA Properties(二)Brightness Contrast1、Contrast Down/Up2、Brightness Down/Up(三)Sharpness1、Sharpness Down/Up2、FilteringConvolution FilteringStatistical FilteringReset Convolution(四)Bands1、Sensor Types2、Common Band Combinations (五)View1、Set Resampling Method2、Pixel Transparency(六)Utilities1、Subset & ChipCreate Subset ImageNITF ChipMaskDice ImageImage Slicer2、Spectral Pro Pro Pro Pro Features3、Pyramids & Statistics Compute Pyramids && Statistics Compute Statistics on Window Generate RSETs(七)Transform & Orthocorrect 1、Transform & OrthoOrtho Using Existing ModelOrtho With Model Selection Transform Using Existing Model Create Affine CalibrationPerform Affine Resample Resample Pixel Size2、Control Points3、Single Point4、Check Accuracy(八)Edit1、Fill2、Offset3、Interpolate九、Drawing(一)Edit1、Cut2、Copy3、Paste4、Delete5、Undo6、Paste from Selected Object (二)Insert Geometry1、Point2、Insert Tic3、Arc4、Create Freehand Polyline5、Rectangle6、Polygon7、Ellipse8、Create Concentric Rings9、Text10、Place GeoPoint11、Place GeoPoint Properties12、GrowGrowGrowing Properties13、EasyTrace14、Lock15、Layer Creation Options (三)Modify1、Enable Editing2、SelectSelectSelect by BoxSelect by LineSelect by EllipseSelect by PolygonFollow HyperlinksSelector PropertiesPick Properties3、LineLineReshapeReplace a portion of a lineSplineDensifyGeneralizeJoinSplit4、AreaAreaReshapeSplit polygon with PolylineReplace a portion of a polygon Append to existing polygonInvert Region5、Vector Options(四)Insert Map Element1、Map GridMap GridUTM GridGeographic GridMGRS Grid Zone ElementDeconflict Grid TicmarksGrid Tic Modifier toolGrid Preferences2、Scale Bar3、Legend4、North ArrowNorth ArrowDefault North Arrow Style5、Dynamic ElementsDynamic ElementsDynamic Text EditorConvert to Text(五)Font/Size1、Font Face2、Font/Symbol Unit Type3、Font/Symbol Size4、Font/Symbol Units5、Bold6、Italic7、Underline8、Colors(六)Locking1、Lock Annotation OrientationLock Annotation OrientationReset Annotation Orientation to Screen Reset Annotation Orientation to Map Lock Annotation Orientation Set Default (七)Styles1、Object Style GalleryAdd to GalleryCustomize Styles2、Customize Styles(八)Shape1、Area Fill2、Line Color3、Line StyleLine Thickness1 pt2 pt4 pt6 ptLine PatternSolid LineDotted LineDashed LineDashed Dotted Line OutlineNo OutlineArrowsNo ArrowStart ArrowEnd ArrowBoth Ends(九)Arrange1、ArrangeOrder ObjectsBring to FrontBring ForwardSend To BackSend BackwardGroup ObjectsGroupUngroupPosition ObjectsRotate North十、Format(一)Insert Geometry1、point2、Insert Tic3、Arc4、Create Freehand Polyline5、Rectangle6、Polygon7、Ellipse8、Create Concentric Rings9、Text10、Place GeoPoint11、Place GeoPoint Properties12、GrowGrowGrowing Properties13、EasyTrace14、Lock15、Layer Creation Options (二)Text1、Text GalleryAdd to Gallery(三)Font1、Font Face2、Font Unit Type3、Font Size4、Font Units5、Bold6、Italic7、Underline8、Colors(四)Symbol1、Symbol Size2、Symbol Units3、Symbol Unit Type(五)Locking1、Lock Annotation OrientationLock Annotation OrientationReset Annotation Orientation to Screen Reset Annotation Orientation to Map Lock Annotation Orientation Set Default (六)Styles1、Object Style GalleryAdd to GalleryCustomize Styles2、Customize Styles(七)Shape1、Area Fill2、Line Color3、Line StyleLine Thickness1 pt2 pt4 pt6 ptLine PatternSolid LineDotted LineDashed LineDashed Dotted Line OutlineNo OutlineArrowsNo ArrowStart ArrowEnd ArrowBoth Ends(八)Arrange1、Bring to Front Bring to FrontBring Forward2、Send to Back Send to BackSend Backward3、GroupGroupUngroup4、AlignAlign Horizontal Left Align Horizontal Center Align Horizontal Right Align Vertically Top Align Vertically Center Align Vertically Bottom Distribute Horizontally Distribute Vertically Alignment..5、FlipFlip VerticallyFlip Horizontally6、Rotate North(十一)Table(一)View1、Show AttributesShow AttributesFrom View Attribute2、Switch Table View(二)Drive1、Drive Viewer to first selected item2、Drive to previous selected feature3、Drive to next selected feature4、Drive Viewer to last selected item5、Zoom to Item(三)Column1、Unselect Columns2、Select All Columns3、Invert Column Selection4、Add Class Name5、Add Area(四)Row1、Unselect Rows2、Select All Rows3、Invert Row Selection4、Criteria(五)Query1、Merge2、Colors3、Column Properties(六)Edit1、Edit Column Next2、Edit Row Next。
一种基于邻域噪声评价法的图像去噪算法(精)

信号点被误判为脉冲噪声点经常发生在图像 的边缘区域・ 在邻域脉冲噪声评价过程中 ,将一个 正方形的对称区域分成几个同样大小的子窗口 , 称之为邻域窗口・ 如图 2 所示 ,局部窗口 Ⅰ 内的中 心像素点 c 属于边缘像素 1 , 在邻域窗口 Ⅱ 中通 过式 ( 1) 局部相似度函数可将其判定为信号点 , 因 为该像素点总是与几个邻域窗口内信号点有很高 的相似度・ 但是 , 由于点 c 在局部窗口 Ⅰ 内与其他 像素点相似度很低 , 却可能会被误判为较强的脉 冲噪声点・
第 2 9 卷第 7 期 2008 年 7 月
东 北 大 学 学 报 ( 自 然 科 学 版 ) Journal of Nort heastern University ( Nat ural Science)
Vol129 ,No. 7 J ul. 2 0 0 8
一种基于邻域噪声评价法的图像去噪算法
刘伟嵬 , 颜云辉 , 孙宏伟 , 王永慧
L k ( c) =
j =0
的不足 ,本文提出了一种新的基于邻域噪声评价 的图像去噪算法・ 新算法中通过分析像素局部统 计信息来计算局部相似度函数 , 评价每个局部像 素点的噪声污染情况 , 从而找到图像的噪声点和 边缘像素点 ,避免小脉冲噪声的遗漏 ; 然后通过邻 域噪声评价 ,收集邻域信息 ,计算邻域噪声评价函 数并作为最终判定各像素点是否为噪声点的依 据 ,因此提高了脉冲噪声的检测精度・ 仿真实验表 明 ,该算法在噪声检测精度 、 客观失真测量和视觉 效果方面具有更好的效果・
neighborhoodimpulsenoiseevaluationconnectionwitoverlappinglocalfiel为此本文提出将邻域噪声评价函数作为最终判定各像素点是否为噪声点的依据该函数通一种基于邻域噪声评价法的图像去噪算法1035过计算所有邻域窗口的相似度函数来实现过上述分析将被考察像素点所在的所有邻域窗口的局部相似度进行求和计算即可得到邻域窗口脉冲噪声评价函数meanabsoluteerrormeansquareerrorpsnrpeaksignal2to2noiseratio作为衡量算法结果好坏的标准maemsepsnr的定义如下其中psnr20lgmse噪声像素点灰度值复原综上所述然后通过邻域噪声评价最终判定是否为脉冲噪声当判定为脉冲噪声点时基于最大相似度原采用该窗口内具有最大局部相似度的像素点的灰度值来替换原始图像中心像素的灰度值实验结果及分析为了对本文所提算法的有效性进行评估本文算法与传统中值滤波算法及最小距离滤波算其中256256ena灰度图像作为实验对象10的脉冲噪声给出了本文滤波算法与其他滤波算法应用于噪声强度为ena图像的视觉效果3a可见ena图像的背景复杂图像的纹理和细节信息比较丰富3d显示出应用经典中值滤波和最小距离滤波方法的脉冲噪声去除效果图像纹理和细节部分略有模糊3e显示出应用本文提出的算法进行处理的效果不仅图像整体清晰度高而且纹理和细节保持好ena图像的性能比较tableperformancecomparisondifferentalgorithmsenaimagecorruptedimpulsenoise2145mse69
采用通道和空间注意力的真实噪声盲去噪算法

2噪声图像的灰度直方图分布
图像去噪属于典型的低层视觉任务,其中底层像素级特 征起着至关重要的作用,目前大多数研究中AWGN水平b 通常在10-50范围内因此本文设定= 10代表低水平 噪声和¢7=50代表高水平噪声,并对比了其灰度直方图分布 与真实噪声图像的分布,如图1所示.
倉3®蓿
灰度值
(a)真实噪声图像
小型微 型计算 机系统
Journal of Chinese Computer Systems
2021年7月第7期
Vol. 42 No. 7 2021
采用通道和空间注意力的真实噪声盲去噪算法
肖娟I,李小霞吕念祖I,周颖胡",王学渊.2
乂西南科技大学信息工程学院,四川绵阳621010) 气特殊环境机器人技术四川省重点实验室,四川绵阳621010)
收稿日期:2020-07-05 收修改稿日期:2021-01-04 基金项目:国家自然科学基金项目(61771411)资助;四川省科技计划项目 (2019YJ0449.2020YFSY0062)资助;西南科技大学研究生创新基金项目(18ycxl21)资助.作者简介:肖娟,女,1994年生,硕士研究生,CCF
合格用FLEXIDOME IP indoor 5000 HD安防摄像头说明书
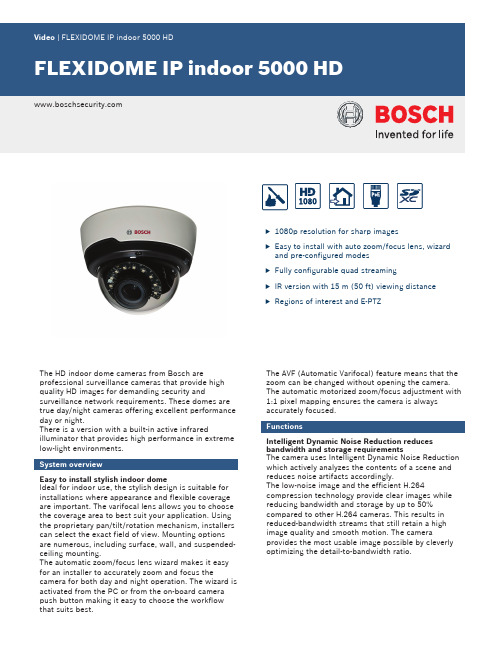
u1080p resolution for sharp imagesu Easy to install with auto zoom/focus lens, wizardand pre-configured modesu Fully configurable quad streamingu IR version with 15 m (50 ft) viewing distanceu Regions of interest and E-PTZThe HD indoor dome cameras from Bosch areprofessional surveillance cameras that provide highquality HD images for demanding security andsurveillance network requirements. These domes aretrue day/night cameras offering excellent performanceday or night.There is a version with a built-in active infraredilluminator that provides high performance in extremelow-light environments.System overviewEasy to install stylish indoor domeIdeal for indoor use, the stylish design is suitable forinstallations where appearance and flexible coverageare important. The varifocal lens allows you to choosethe coverage area to best suit your application. Usingthe proprietary pan/tilt/rotation mechanism, installerscan select the exact field of view. Mounting optionsare numerous, including surface, wall, and suspended-ceiling mounting.The automatic zoom/focus lens wizard makes it easyfor an installer to accurately zoom and focus thecamera for both day and night operation. The wizard isactivated from the PC or from the on-board camerapush button making it easy to choose the workflowthat suits best.The AVF (Automatic Varifocal) feature means that thezoom can be changed without opening the camera.The automatic motorized zoom/focus adjustment with1:1 pixel mapping ensures the camera is alwaysaccurately focused.FunctionsIntelligent Dynamic Noise Reduction reducesbandwidth and storage requirementsThe camera uses Intelligent Dynamic Noise Reductionwhich actively analyzes the contents of a scene andreduces noise artifacts accordingly.The low-noise image and the efficient H.264compression technology provide clear images whilereducing bandwidth and storage by up to 50%compared to other H.264 cameras. This results inreduced-bandwidth streams that still retain a highimage quality and smooth motion. The cameraprovides the most usable image possible by cleverlyoptimizing the detail-to-bandwidth ratio.Area-based encodingArea-based encoding is another feature which reduces bandwidth. Compression parameters for up to eight user-definable regions can be set. This allows uninteresting regions to be highly compressed, leaving more bandwidth for important parts of the scene. Bitrate optimized profileThe average typical optimized bandwidth in kbits/s for various image rates is shown in the table:Multiple streamsThe innovative multi-streaming feature delivers various H.264 streams together with an M‑JPEG stream. These streams facilitate bandwidth-efficient viewing and recording as well as integration with third-party video management systems.Depending on the resolution and frame rate selected for the first stream, the second stream provides a copy of the first stream or a lower resolution stream.The third stream uses the I-frames of the first stream for recording; the fourth stream shows a JPEG image at a maximum of 10 Mbit/s.Regions of interest and E-PTZRegions of Interest (ROI) can be user defined. The remote E-PTZ (Electronic Pan, Tilt and Zoom) controls allow you to select specific areas of the parent image. These regions produce separate streams for remote viewing and recording. These streams, together with the main stream, allow the operator to separately monitor the most interesting part of a scene while still retaining situational awareness.Built-in microphone, two-way audio and audio alarm The camera has a built-in microphone to allow operators to listen in on the monitored area. Two-way audio allows the operator to communicate with visitors or intruders via an external audio line input and output. Audio detection can be used to generate an alarm if needed.If required by local laws, the microphone can be permanently blocked via a secure license key. Tamper and motion detectionA wide range of configuration options is available for alarms signaling camera tampering. A built-in algorithm for detecting movement in the video can also be used for alarm signaling.Storage managementRecording management can be controlled by the Bosch Video Recording Manager (VRM) or the camera can use iSCSI targets directly without any recording software.Edge recordingThe MicroSD card slot supports up to 2 TB of storage capacity. A microSD card can be used for local alarm recording. Pre-alarm recording in RAM reduces recording bandwidth on the network, or — if microSD card recording is used — extends the effective life of the storage medium.Cloud-based servicesThe camera supports time-based or alarm-based JPEG posting to four different accounts. These accounts can address FTP servers or cloud-based storage facilities (for example, Dropbox). Video clips or JPEG images can also be exported to these accounts.Alarms can be set up to trigger an e-mail or SMS notification so you are always aware of abnormal events.Easy installationPower for the camera can be supplied via a Power-over-Ethernet compliant network cable connection. With this configuration, only a single cable connection is required to view, power, and control the camera. Using PoE makes installation easier and more cost-effective, as cameras do not require a local power source.The camera can also be supplied with power from+12 VDC power supplies.For trouble-free network cabling, the camera supports Auto-MDIX which allows the use of straight or cross-over cables.True day/night switchingThe camera incorporates mechanical filter technology for vivid daytime color and exceptional night-time imaging while maintaining sharp focus under all lighting conditions.Hybrid modeAn analog video output enables the camera to operate in hybrid mode. This mode provides simultaneous high resolution HD video streaming and an analog video output via an SMB connector. The hybrid functionality offers an easy migration path from legacy CCTV to a modern IP-based system.Access securityPassword protection with three levels and 802.1x authentication is supported. To secure Web browser access, use HTTPS with a SSL certificate stored in the camera.Complete viewing softwareThere are many ways to access the camera’s features: using a web browser, with the Bosch Video Management System, with the free-of-chargeBosch Video Client or Video Security Client, with the video security mobile app, or via third-party software. Video security appThe Bosch video security mobile app has been developed to enable Anywhere access to HD surveillance images allowing you to view live images from any location. The app is designed to give you complete control of all your cameras, from panning and tilting to zoom and focus functions. It’s like taking your control room with you.This app, together with the separately available Bosch transcoder, will allow you to fully utilize our dynamic transcoding features so you can play back images even over low-bandwidth connections.System integrationThe camera conforms to the ONVIF Profile S, ONVIF Profile Q and ONVIF Profile G specifications. Compliance with these standards guarantees interoperability between network video products regardless of manufacturer.Third-party integrators can easily access the internal feature set of the camera for integration into large projects. Visit the Bosch Integration Partner Program (IPP) website () for more information.HD standardsComplies with the SMPTE 274M-2008 Standard in:–Resolution: 1920x1080–Scan: Progressive–Color representation: complies with ITU-R BT.709–Aspect ratio: 16:9–Frame rate: 25 and 30 frames/sComplies with the SMPTE 296M-2001 Standard in:–Resolution: 1280x720–Scan: Progressive–Color representation: complies with ITU-R BT.709–Aspect ratio: 16:9–Frame rate: 25 and 30 frames/sInstallation/configuration notesDimensions mm (inch)Parts included•Camera•Screw kit•Installation documentation Technical specificationsSensitivity – (3200K, reflectivity 89%, F1.3, 30IRE)Ordering informationFLEXIDOME IP indoor 5000 HDProfessional IP dome camera for indoor HD surveillance. Varifocal 3 to 10 mm f1.3 lens; IDNR; day/ night; H.264 quad-streaming; cloud services; motion/ tamper/audio detection; microphone; 1080pOrder number NIN-51022-V3FLEXIDOME IP indoor 5000 IRProfessional IP dome camera for indoor HD surveillance. Varifocal 3 to 10 mm f1.3 lens; IDNR; day/ night; H.264 quad-streaming; cloud services; motion/ tamper/audio detection; microphone; 1080p; infrared Order number NII-51022-V3FLEXIDOME IP indoor 5000 HDProfessional IP dome camera for indoor HD surveillance. Automatic Varifocal 3 to 10 mm f1.3 lens; DC iris; IDNR; day/night; H.264 quad-streaming; cloud services; motion/tamper/audio detection; microphone; 1080pOrder number NIN-50022-A3FLEXIDOME IP indoor 5000 IRProfessional IP dome camera for indoor HD surveillance. Automatic Varifocal 3 to 10 mm f1.3 lens; DC iris; IDNR; day/night; H.264 quad-streaming; cloud services; motion/tamper/audio detection; microphone; 1080p; infraredOrder number NII-50022-A3AccessoriesNDA-LWMT-DOME Dome Wall MountSturdy wall L-shaped bracket for dome cameras Order number NDA-LWMT-DOMENDA-ADTVEZ-DOME Dome Adapter BracketAdapter bracket (used together with appropriate wall or pipe mount, or surface mount box)Order number NDA-ADTVEZ-DOMEVEZ-A2-WW Wall MountWall mount (Ø145/149 mm) for dome cameras (use together with appropriate dome adapter bracket); whiteOrder number VEZ-A2-WWVEZ-A2-PW Pipe MountPendant pipe mount (Ø145/149 mm) for dome cameras (use together with appropriate dome adapter bracket); whiteOrder number VEZ-A2-PWLTC 9213/01 Pole Mount AdapterFlexible pole mount adapter for camera mounts (use together with the appropriate wall mount bracket). Max. 9 kg (20 lb); 3 to 15 inch diameter pole; stainless steel strapsOrder number LTC 9213/01NDA-FMT-DOME In-ceiling mountIn-ceiling flush mounting kit for dome cameras(Ø157 mm)Order number NDA-FMT-DOMENDA-ADT4S-MINDOME 4S Surface Mount BoxSurface mount box (Ø145 mm / Ø5.71 in) for dome cameras (use together with the appropriate dome adapter bracket).Order number NDA-ADT4S-MINDOMEMonitor/DVR Cable SMB 0.3M0.3 m (1 ft) analog cable, SMB (female) to BNC (female) to connect camera to coaxial cableOrder number NBN-MCSMB-03MMonitor/DVR Cable SMB 3.0M3 m (9 ft) analog cable, SMB (female) to BNC (male) to connect camera to monitor or DVROrder number NBN-MCSMB-30MNPD-5001-POE Midspan PoE InjectorPower-over-Ethernet midspan injector for use with PoE enabled cameras; 15.4 W, 1-portOrder number NPD-5001-POENPD-5004-POE Midspan PoE InjectorPower-over-Ethernet midspan injectors for use with PoE enabled cameras; 15.4 W, 4-portsOrder number NPD-5004-POERepresented by:North America:Europe, Middle East, Africa:Asia-Pacific:China:Latin America and Caribbean:Bosch Security Systems, Inc. 130 Perinton Parkway Fairport, New York, 14450, USA Phone: +1 800 289 0096 Fax: +1 585 223 9180***********************.com Bosch Security Systems B.V.P.O. Box 800025617 BA Eindhoven, The NetherlandsPhone: + 31 40 2577 284Fax: +31 40 2577 330******************************Robert Bosch (SEA) Pte Ltd, SecuritySystems11 Bishan Street 21Singapore 573943Phone: +65 6571 2808Fax: +65 6571 2699*****************************Bosch (Shanghai) Security Systems Ltd.203 Building, No. 333 Fuquan RoadNorth IBPChangning District, Shanghai200335 ChinaPhone +86 21 22181111Fax: +86 21 22182398Robert Bosch Ltda Security Systems DivisionVia Anhanguera, Km 98CEP 13065-900Campinas, Sao Paulo, BrazilPhone: +55 19 2103 2860Fax: +55 19 2103 2862*****************************© Bosch Security Systems 2016 | Data subject to change without notice 188****8507|en,V9,01.Jun2016。
纹理物体缺陷的视觉检测算法研究--优秀毕业论文

摘 要
在竞争激烈的工业自动化生产过程中,机器视觉对产品质量的把关起着举足 轻重的作用,机器视觉在缺陷检测技术方面的应用也逐渐普遍起来。与常规的检 测技术相比,自动化的视觉检测系统更加经济、快捷、高效与 安全。纹理物体在 工业生产中广泛存在,像用于半导体装配和封装底板和发光二极管,现代 化电子 系统中的印制电路板,以及纺织行业中的布匹和织物等都可认为是含有纹理特征 的物体。本论文主要致力于纹理物体的缺陷检测技术研究,为纹理物体的自动化 检测提供高效而可靠的检测算法。 纹理是描述图像内容的重要特征,纹理分析也已经被成功的应用与纹理分割 和纹理分类当中。本研究提出了一种基于纹理分析技术和参考比较方式的缺陷检 测算法。这种算法能容忍物体变形引起的图像配准误差,对纹理的影响也具有鲁 棒性。本算法旨在为检测出的缺陷区域提供丰富而重要的物理意义,如缺陷区域 的大小、形状、亮度对比度及空间分布等。同时,在参考图像可行的情况下,本 算法可用于同质纹理物体和非同质纹理物体的检测,对非纹理物体 的检测也可取 得不错的效果。 在整个检测过程中,我们采用了可调控金字塔的纹理分析和重构技术。与传 统的小波纹理分析技术不同,我们在小波域中加入处理物体变形和纹理影响的容 忍度控制算法,来实现容忍物体变形和对纹理影响鲁棒的目的。最后可调控金字 塔的重构保证了缺陷区域物理意义恢复的准确性。实验阶段,我们检测了一系列 具有实际应用价值的图像。实验结果表明 本文提出的纹理物体缺陷检测算法具有 高效性和易于实现性。 关键字: 缺陷检测;纹理;物体变形;可调控金字塔;重构
Keywords: defect detection, texture, object distortion, steerable pyramid, reconstruction
II
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验结果
MSE(mean squared error):数理统计中均方误差是指 参数估计值与参数真值之差平方的期望值.
图
维纳滤波后
模糊均值滤波
本文的算法
实验结果
实验结果总结
主要创新
1.采用模糊集的方法来描述中心像素点的方向导数 2.采用模糊集的方法来描述模糊导数的正负 3.在每一次迭代完成后,根据剩余噪声的强度自适应 改变隶属度函数的参数K
目录
论文信息 传统的方法 本文算法 实验结果 主要创新
论文信息
Authors: Dimitri Van De Ville,Member,IEEE,Mike Nachtegael,Dietrich Van der Weken,Etienne E. Kerre,Wilfried Philips,Member,IEEE,and Ignace Lemahieu,Senior Member,IEEE Publication: IEEE TRANSACTIONS ON FUZZY SYSTEMS,VOL.11,NO.4,AUGUST 2003
自适应参数K的选择
设计一个根据图像噪声强度变化的参数K,进而得到 自适应的隶属度函数。 将图像分割成NxN的不重叠的块,对不同的图像块分 别计算 μ ,指出μ 越大,图像块的像素值越集中
证明 μ 和图像的噪声强度 有线性关系
自适应参数K的选择
μ
自适应阈值K的选择
实验结果
原始图像
本文的工作
模糊导数的定义
导数的定义:邻域像素与中心像素的差值
∇ N(x,y)=I(x,y-1)-I(x,y)
∇ NW(x,y)=I(x-1,y-1)-I(x,y)
D∈dir= NW,W,SW,S,SE,E,NE,N
模糊导数的定义
当图像边缘通过中心像素点时,中心像素点的邻近 像素点的导数较大。因此,如果一个方向的邻近三 个像素的导数有两个导数都是较小的,说明该像素 点附近不是边缘,很有可能是噪声产生的。
其中and和or操作分别对应最小值和最大值运 算
模糊导数的应用
上阶段得到的模糊导数不能直接与中心像素点的 值相加,需要指定模糊导数的正负,论文采用一 个模糊规则来描述模糊导数的正负。
模糊导数的应用
L Δ= 8
D∈dir
(λ
+ D
-λ )
D
D∈dir= NW,W,SW,S,SE,E,NE,N
传统的方法
中值滤波:把数字图像或数字序列中一点的值用该点 的一个邻域中各点值的中值代替,让周围的像素值 接近的真实值,从而消除孤立的噪声点 均值滤波算法:该滤波算法的主要是对滤波窗口内 所有象素进行加权平均,将得到的平均灰度值代替 滤波窗口中心象素的灰度值,进而完成滤波操作 排序统计滤波算法(OSF):该算法首先将滤波窗口中 的各象素按照升序或降序进行排列,得到排序向量 ,然后对排序后的象素进行加权平均,进而得到被 处理象素的最终结果
∇ NW(x,y)
∇ NW(x-1,y+1)
∇ NW(x+1,y-1)
模糊导数的定义
每个方向计算模糊导数选择的邻域像素点参考表。
模糊导数的定义
将“小”设置为模糊集 隶属度函数定义:
m K(u)={
1-
u
0 u K K, 0 ,u K
u是某一方向的导数,K是一个自适应参数
模糊导数的定义