GPS高程与正常高的转换
正高与正常高的区别
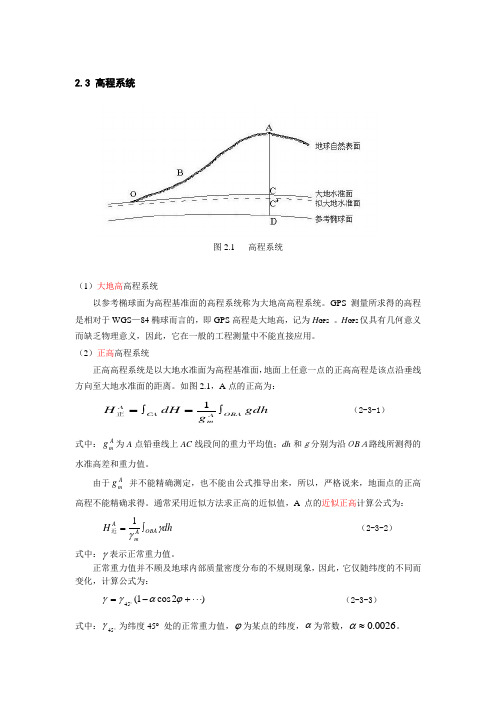
2.3 高程系统图2.1 高程系统(1)大地高高程系统以参考椭球面为高程基准面的高程系统称为大地高高程系统。
GPS 测量所求得的高程是相对于WGS —84椭球而言的,即GPS 高程是大地高,记为H GPS 。
H GPS 仅具有几何意义而缺乏物理意义,因此,它在一般的工程测量中不能直接应用。
(2)正高高程系统正高高程系统是以大地水准面为高程基准面,地面上任意一点的正高高程是该点沿垂线方向至大地水准面的距离。
如图2.1,A 点的正高为:gdh g dH H OBA A mCA A ⎰=⎰=1正 (2-3-1) 式中:A m g 为A 点铅垂线上AC 线段间的重力平均值;dh 和g分别为沿OB A路线所测得的水准高差和重力值。
由于A m g 并不能精确测定,也不能由公式推导出来,所以,严格说来,地面点的正高高程不能精确求得。
通常采用近似方法求正高的近似值,A 点的近似正高计算公式为: dh H OBA Am A γγ⎰=1近 (2-3-2)式中:γ表示正常重力值。
正常重力值并不顾及地球内部质量密度分布的不规则现象,因此,它仅随纬度的不同而变化,计算公式为:)2cos 1(45⋅⋅⋅+-=ϕαγγ (2-3-3)式中: 45γ为纬度45︒ 处的正常重力值,ϕ为某点的纬度,α为常数,0026.0≈α。
由于地球内部质量分布并不是均匀的,因此,正常重力值γ与实测重力值g 并不相同,在某些地区(如我国西部高山地区)差异很大,因此,近似正高在这些地区会受到较大的歪曲。
(3)正常高高程系统以似大地水准面为基准面的高程系统称为正常高高程系统。
正常高高程计算公式为: gdh H OBA Am A ⎰=γ1常 (2-3-4)由上式与式(2-3-1)比较可知,正高高程无法精确求得,但正常高高程可以精确求得。
在式(2-3-4)中,g 可由重力测量结果求得,dh 可由水准测量的结果求得,而 A m γ可由正常重力公式计算求得。
GPS原理及应用题目及答案

GPS原理及应用复习题目一.名词解释1二体问题:2真近点角、平近点角、偏近点角:3多路径效应:4无约束平差和约束平差5.章动6.异步观测7.接收机钟差8.周跳9.三维平差10.岁差11.同步观测12.卫星钟差13.整周未知数14.二维平差二.填空题1.GPS工作卫星的地面监控系统包括__________ 、__________ 、__________ 。
2.GPS系统由__________ 、__________ 、__________ 三大部分组成。
3.按照接收的载波频率,接收机可分为__________ 和__________接收机。
4.GPS卫星信号由、、三部分组成。
5.接收机由、、三部分组成。
6.GPS卫星信号中的测距码和数据码是通过技术调制到载波上的。
7. 1973年12月,GPS系统经美国国防部批准由陆海空三军联合研制。
自1974年以来其经历了、、三个阶段。
8.GPS 卫星星座基本参数为:卫星数目为、卫星轨道面个数为、卫星平均地面高度约20200公里、轨道倾角为度。
9.GPS定位成果属于坐标系,而实用的测量成果往往属于某国的国家或地方坐标系,为了实现两坐标系之间的转换,如果采用七参数模型,则该七个参数分别为,如果要进行不同大地坐标系之间的换算,除了上述七个参数之外还应增加反映两个关于地球椭球形状与大小的参数,它们是和。
10.真春分点随地球自转轴的变化而不断运动,其运动轨迹十分复杂,为了便于研究,一般将其运动分解为长周期变化的和短周期变化的。
11.GPS广播星历参数共有16个,其中包括1个,6个对应参考时刻的参数和9个反映参数。
12.GNSS的英文全称是。
13.载体的三个姿态角是、、。
14、GPS星座由颗卫星组成,分布在个不同的轨道上,轨道之间相距°,轨道的倾角是°,在地球表面的任何地方都可以看见至少颗卫星,卫星距地面的高度是km。
15、GPS使用L1和L2两个载波发射信号,L1载波的频率是MHZ,波长是cm,L2 载波的频率是MHZ,波长是cm。
高级工程测量工试题(1)
高级工程测量工试题(1)高级工程测量工试题(1)一.判断题1.对测绘仪器.工具,必须做到及时检查校正,加强维护.定期检修。
() 2.工程测量应以中误差作为衡量测绘精度的标准,三倍中误差作为极限误差。
()3.大.中城市的GPS网应与国家控制网相互联接和转换,并应与附近的国家控制点联测,联测点数不应少于3个。
()4.在测量中,观测的精度就是指观测值的数学期望与其真值接近的程度。
() 5.测量过程中仪器对中均以铅垂线方向为依据,因此铅垂线是测量外业的基准线。
() 6.地面点的高程通常是指该点到参考椭球面的垂直距离。
() 7.GPS点高程(正常高)经计算分析后符合精度要求的可供测图或一般工程测量使用。
() 8.按地籍图的基本用途,地籍图可划分为分幅地籍图和宗地图二类。
() 9.国家控制网布设的原则是由高级到低级.分级布网.逐级控制。
() 10.地形的分幅图幅按矩形(或正方形)分幅,其规格为40cm×50cm 或50cm×50cm。
()11.采用三角网布设首级网时,宜布设为近似等边三角形网,其三角形的内角不应小于20°。
()12.在几何水准测量中,保证前后视距相等,可以消除球气差的影响。
() 13.高斯投影是一种等面积投影方式。
() 14.在54坐标系中,Y坐标值就是距离中子午线的距离。
() 15.在四等以上的水平角观测中,若零方向的2C互差超限,应重测整个测回。
() 16.在工程测量中,一级导线的平均边长不应超过1Km,导线相对闭合差≤1/15000。
(X) 17.用测距仪测量边长时,一测回是指照准目标一次,读数一次的过程。
(X)18.在水准测量中,当测站数为偶数时,不必加入一对水准尺的零点差改正,但是当测站数为奇数时,一定在加入零点差改正。
(V)19.影响电磁波三角高程测量精度的主要因素是大气折光的影响。
(V)20.误差椭圆可用来描述点位误差的大小和在特定方向的误差。
待定点的误差椭圆是相对于已知点的。
GPS四参数设置
GPS四参数设置。
南方RTK使用中参数的求取及分类一、控制点坐标库的应用GPS 接收机输出的数据是WGS-84经纬度坐标,需要转化到施工测量坐标,这就需要软件进行坐标转换参数的计算和设置,控制点坐标库就是完成这一工作的主要工具。
控制点坐标库是计算四参数和高程拟合参数的工具,可以方便直观的编辑、查看、调用参与计算四参数和高程拟合参数的校正控制点。
在进行四参数的计算时,至少需要两个控制点的两套坐标系坐标参与计算才能最低限度的满足控制要求。
高程拟合时,使用三个点的高程进行计算时,控制点坐标库进行加权平均的高程拟合;使用4到6个点的高程时,控制点坐标库进行平面高程拟合;使用7个以上的点的高程时,控制点坐标库进行曲面拟合。
控制点的选用和平面、高程拟合都有着密切而直接的关系,这些内容涉及到大量的布设经典测量控制网的知识,在这里没有办法多做介绍,建议用户查阅相关测量资料。
利用控制点坐标库的做法大致是这样的:假设我们利用A、B 这两个已知点来求取参数,那么首先要有A、B 两点的GPS 原始记录坐标和测量施工坐标。
A、B 两点的GPS原始记录坐标的获取有两种方式:一种是布设静态控制网,采用静态控制网布设时后处理软件的GPS 原始记录坐标;另一种是GPS 移动站在没有任何校正参数起作用的Fixed(固定解)状态下记录的GPS 原始坐标。
其次在操作时,先在控制点坐标库中输入A 点的已知坐标,之后软件会提示输入A 点的原始坐标,然后再输入B 点的已知坐标和B 点的原始坐标,录入完毕并保存后(保存文件为*.cot文件)控制点坐标库会自动计算出四参数和高程拟合参数。
1.1、校正参数操作:工具→校正向导或设置→求转换参数(控制点坐标库)所需已知点数:1个校正参数是工程之星软件很特别的一个设计,它是结合国内的具体测量工作而设计的。
校正参数实际上就是只用同一个公共控制点来计算两套坐标系的差异。
根据坐标转换的理论,一个公共控制点计算两个坐标系误差是比较大的,除非两套坐标系之间不存在旋转或者控制的距离特别小。
gps怎么测量高程
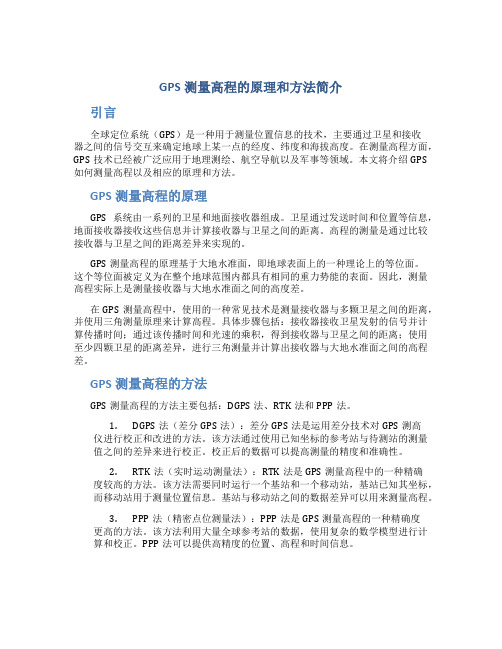
GPS测量高程的原理和方法简介引言全球定位系统(GPS)是一种用于测量位置信息的技术,主要通过卫星和接收器之间的信号交互来确定地球上某一点的经度、纬度和海拔高度。
在测量高程方面,GPS技术已经被广泛应用于地理测绘、航空导航以及军事等领域。
本文将介绍GPS 如何测量高程以及相应的原理和方法。
GPS测量高程的原理GPS系统由一系列的卫星和地面接收器组成。
卫星通过发送时间和位置等信息,地面接收器接收这些信息并计算接收器与卫星之间的距离。
高程的测量是通过比较接收器与卫星之间的距离差异来实现的。
GPS测量高程的原理基于大地水准面,即地球表面上的一种理论上的等位面。
这个等位面被定义为在整个地球范围内都具有相同的重力势能的表面。
因此,测量高程实际上是测量接收器与大地水准面之间的高度差。
在GPS测量高程中,使用的一种常见技术是测量接收器与多颗卫星之间的距离,并使用三角测量原理来计算高程。
具体步骤包括:接收器接收卫星发射的信号并计算传播时间;通过该传播时间和光速的乘积,得到接收器与卫星之间的距离;使用至少四颗卫星的距离差异,进行三角测量并计算出接收器与大地水准面之间的高程差。
GPS测量高程的方法GPS测量高程的方法主要包括:DGPS法、RTK法和PPP法。
1.DGPS法(差分GPS法):差分GPS法是运用差分技术对GPS测高仪进行校正和改进的方法。
该方法通过使用已知坐标的参考站与待测站的测量值之间的差异来进行校正。
校正后的数据可以提高测量的精度和准确性。
2.RTK法(实时运动测量法):RTK法是GPS测量高程中的一种精确度较高的方法。
该方法需要同时运行一个基站和一个移动站,基站已知其坐标,而移动站用于测量位置信息。
基站与移动站之间的数据差异可以用来测量高程。
3.PPP法(精密点位测量法):PPP法是GPS测量高程的一种精确度更高的方法。
该方法利用大量全球参考站的数据,使用复杂的数学模型进行计算和校正。
PPP法可以提供高精度的位置、高程和时间信息。
GPS简答题
1、主控站的主要作用有哪些?答:主控站的作用有:(1)收集数据;(2)数据处理;(3)监测与协调;(4)控制卫星2、地面监控站部分的工作程序是怎样的?GPS卫星的主要作用有哪些方面?答:地面监控部分的工作程序为:由监测站连续接收GPS卫星信号,不断积累测距数据(伪距和伪距差),并将这些测距数据以及气象数据、卫星状态数据等发送到主控站;再由主控站对测距数据进行包括电离层、对流层、相对论效应、天线相位中心的偏移及地球自转和时标改正等的传播时延改正。
并用卡尔曼数学滤波器进行连续数据平滑处理及最小二乘与多项式拟合,以提供卫星的位置和速度的六个轨道根数的摄动,每个卫星的三个太阳压力常数,卫星的时钟偏差,漂移和漂移率,各监测站的时钟偏差,对流层残余偏差及三个极移偏差状态数据,并将这些数据编成导航电文传送到注入站。
最后由注入站将这些导航电文注入卫星。
GPS卫星的主要作用有三方面:(1)、接收地面注入站发送的导航电文和其它信号;(2)、接收地面主控站的命令,修正其在轨运行偏差及启用备件等;(3)、连续地向广大用户发送GPS导航定位信号,并用电文的形式提供卫星自身的现势位置与其它在轨卫星的概略位置,以便用户接收使用。
3、星历误差对定位的影响有哪些?减弱星历误差影响的途径有几种?答:对于单点定位时,星历误差的径向分量作为等价测距误差进入平差计算,配赋到星站坐标和接收机钟改正数中去,具体配赋方式则与卫星的几何图形有关。
减弱星历误差影响的途径:(1)建立卫星跟踪网独立定轨;(2)相对定位;(3)轨道松弛法。
4、电离层折射及其影响有哪些?减弱电离层影响的有效措施有几种?答:当GPS信号通过电离层时,如同其它电磁波一样,信号的路径会发生弯曲,传播速度会发生变化。
此时再用光速乘上信号传播时间就不会等于卫星至接收机的实际距离。
对于GPS 信号,这种距离差在天顶方向最大可达50m,在接近地平方向时可达150m。
减弱电离层影响的有效措施:(1)相对定位;(2)双频接收。
大地高与正常高的转换
大地高与正常高的转换1.引言1.1 概述概述部分的内容可以如下所示:概述部分旨在介绍本文的主题和内容,即大地高与正常高的转换。
在地理测量学中,大地高和正常高是两个重要的概念,对于地面高度的测量与计算具有重要意义。
在本文中,我们将首先通过对大地高和正常高的定义与测量方法进行详细介绍,使读者对这两个概念有一个清晰的了解。
大地高是指相对于地球参考椭球体而言的地面高度,而正常高则是指相对于一个确定的重力场而言的地面高度。
随后,我们将讨论大地高与正常高之间的关系。
由于地球的引力场并不完全均匀,所以大地高与正常高之间存在一定的差异。
了解这种关系对于地理测量学的精确度与准确性至关重要。
最后,本文将介绍一些转换大地高与正常高的方法。
这些方法可根据所处的地理区域和所需的精度级别来确定。
了解这些转换方法能够帮助我们在地理信息系统(GIS)和其他相关应用中更好地处理地面高度数据。
通过阅读本文,读者将能够对大地高与正常高的概念有一个全面的了解,并且掌握转换这两者之间的方法。
这将为地理测量学和地理信息系统领域的从业人员提供重要的参考和指导。
1.2 文章结构文章结构部分的内容可以以以下方式进行编写:在本文中,将按照以下结构来讨论大地高与正常高的转换问题。
首先,在引言部分对本文的概述进行简要介绍。
然后,给出文章的整体结构,以指导读者了解本文的组织方式和内容安排。
最后,阐明本文的目的,即探讨大地高与正常高之间的关系,并提供一些转换方法。
接下来,正文部分将分为两个主要部分:大地高的定义与测量方法,正常高的定义与测量方法。
对这两个概念将进行详细讲解,包括它们的定义、相关测量方法和相关领域的应用。
通过比较和对照这两个概念的不同特点和测量方式,我们可以更好地理解它们之间的关系。
最后,在结论部分,将综合前文的讨论,对大地高与正常高之间的关系进行总结,并提供一些转换大地高与正常高的方法。
这部分将揭示两者之间的联系和转换的重要性,同时也会提供一些建议和技巧,以帮助读者在实际应用中进行转换。
GPS高程
∧
多面函数法
多面函数法作为一种优良的内插方法,无论在DEM内插中,还是在 GPS点的高程异常内插中,都可以获得令人满意的内插结果。 多面函数法是从几何观点出发,解决根据数据点形成一个平差的数 学曲面问题。其理论根据是认为“任何一个圆滑的数学表面总可 以用一系列有规则的数学表面总和,以任意的精度逼近”。即某点 的高程异常的表达式为:
多参数方法 ∆ D trop ( t ) = ( ρ w + ρ d + ρ i ) m ( E ) T i −1 ≤ t < T i , T i = T i −1 + ∆ T
II:解决的途径:
利用模型改正 用两个观测站同步观测求差
(3)、多路径效应
3、与信号传播有关的误差 (1)、观测误差
③平差转换法
在某一区域内,如果有一定数量的点具有三维坐标, 我们即可根据坐标转换的原理,求得参考椭球面与 似大地水准面之间的平移和旋转参数,并把这些参 数加入GPS网的平差,在已知点的约束下,通过平 差即可求得GPS观测点的平面坐标和正常高高程。 这种方法的精度取决于已知点的密度,已知数据的 精度以及平移旋转参数的精度。
GPS高程的概述 GPS高程的概述
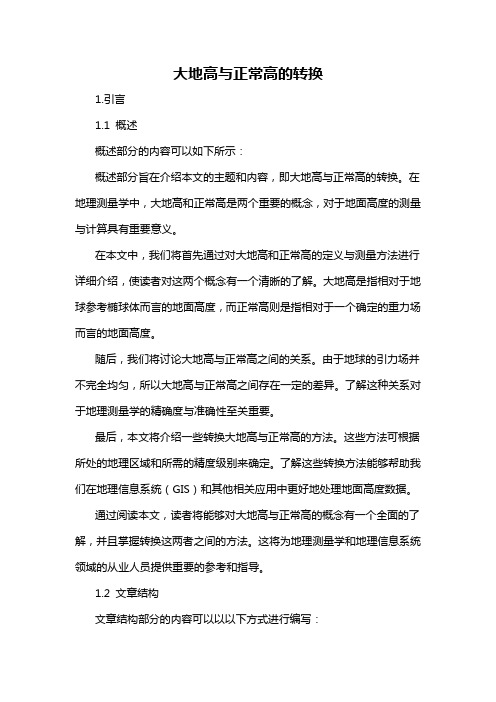
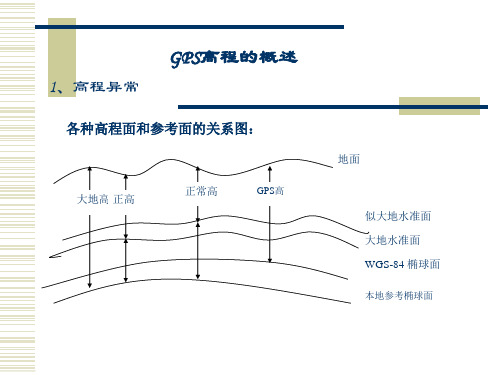
1、高程异常
各种高程面和参考面的关系图: 各种高程面和参考面的关系图:
地面 正常高
GPS高
大地高 正高
似大地水准面 大地水准面 WGS-84 椭球面
本地参考椭球面
2、GPS高程转换的基本程序
i H i Nor = HGPS − ξi
i i ξ i = H GPS − H Nor
在某一区域内,如果有一定数量的已知水准点(正常高已知),在这些已 知高程的水准点上施测GPS,每点的高程异常值就可计算得到。然后,再用 一个函数来模拟该区域的似大地水准面的高度,这样我们就可以用数学内 插的方法求解区域内任一点的高程异常值。此时,如果在区域内某点上通 过GPS测量得到了,我们可以用模拟好的数学模型求解该点的,进而求得该 点的正常高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.分区拟合 见下图
• 平面的一般方程: • Ax+By+Cz+D=0
作业
• 1.高程拟合 • 点分布的情况高的转换
四、常用的高程拟合方法 目前,由于区域似大地水准面精化并没有普及,因此在 实际的工程应用中,几何的高程拟合方法仍然广泛的应用。
多项式拟合法几种模型
1. 一次多项式模型 (1)平面坐标函数形式
a0 a1 x a2 y (4 1)
式(4-1)中, ζ为某点的高程异常; x,y为该点 的平面直角坐标,a0、a1、a2为待定转换参数。
GPS高程与正常高的转换
五、多项式拟合实施步骤 (2)二次多项式拟合实施步骤
因为
ˆ1 1 v1 ˆ2 2 v 2
ˆm m v m
GPS高程与正常高的转换
五、多项式拟合实施步骤 (2)二次多项式拟合实施步骤
所以
2 2 ˆ ˆ ˆ ˆ ˆ ˆ v2 a0 x2 a1 y2 a2 x2 a3 y2 a4 x2 y2 a5 2 .......... .. 2 2 ˆ ˆ ˆ ˆ ˆ ˆ vm a0 xm a1 ym a2 xm a3 ym a4 xm ym a5 m ˆ ˆ ˆ ˆ ˆ ˆ v1 a0 x1a1 y1a2 x12 a3 y12 a4 x1 y1a5 1
GPS高程与正常高的转换
五、多项式拟合实施步骤 (1)一次多项式拟合实施步骤 当重合点多余3个,设有n个时,我们则可以按照平差的方法求解。 根据平差原理,此问题的必要观测数t=3,观测数为n。 如果按照间接平差法求解,则应设3个独立的参数,然后,列出n个 误差方程,求出参数。 就设a0、a1、a2为参数,然后列出如下形式的平差值方程:
ˆ ˆ ˆ ˆ 1 a0 x1a1 y1a2 ˆ ˆ ˆ ˆ 2 a0 x2 a1 y2 a2 ............ ˆ ˆ ˆ ˆ n a0 xn a1 yn a2
GPS高程与正常高的转换
五、多项式拟合实施步骤 (1)一次多项式拟合实施步骤 由
GPS高程与正常高的转换
四、常用的几种高程拟合方法
多项式拟合法几种模型
1. 一次多项式模型 (2)经纬度函数形式 式中 :B、L为某点的经纬度 其它符号见下式表示。
a0 a1dB a2 dL
或
a0 a1B a2 L
dB B B0 , dL L L0
B 其中:B0 n
GPS高程与正常高的转换
二、高程系统
4. 大地水准面差距
大地水准面到椭球面的距离,称为大地水准 面差距,记为hg (或N) 。
5. 高程异常
似大地水准面到椭球面的距离,称为高程异 常,记为ζ 。
6. 三个高程系统之间的转换关系
如图,可以看出 H=Hg+ hg H= Hγ + ζ
GPS高程与正常高的转换
GPS高程与正常高的转换
三、GPS高程的实现方法
4. 区域似大地水准面精化法
高精度、高分辨率大地水准面的确定,其主 要目的是:用GPS技术结合区域内的地面重力资 料、水准资料、高分辨率的地形数据以及最新的 重力场模型,精确研究并确定区域似大地水准面, 以求取高精度的高程异常,从根本上解决GPS技 术无法直接提供正常高的问题。
GPS高程与正常高的转换
三、GPS高程的实现方法
2. 地球模型法
地球模型法本质上是一种数字化的等值线图, 目 前 国 际 上 较 长 采 用 的 地 球 模 型 有 OSU91A 、 EGM96等。不过这些模型均不适合于我国
3. 高程拟合法
高程拟合法就是利用在范围不大的区域中, 高程异常具有一定得相关性这一原理,采用数学 方法求解正高、正常高或高程异常。
GPS高程与正常高的转换
五、多项式拟合实施步骤 (2)二次多项式拟合实施步骤
1 1 B 1
x1 x2 xm
y1 y2 ym
x12
2 x2
y12
2 y2
x1 y1 x2 y2 xm ym
2 xm 2 ym
V v1
ˆ ˆ x a0
2 2
a0 a1dB a2dL a3 (dB)2 a4 (dL)2 a5dBdL (4 6)
GPS高程与正常高的转换
五、多项式拟合实施步骤 (1)一次多项式拟合实施步骤 根据一次多项式数学模型
a0 a1 x a2 y
如果求出a0 、a1 、a2 三个系数,就可以根据点的位置(x,y)求 出点的高程异常,进而求出点的正常高
GPS高程与正常高的转换
二、高程系统 测量中常用的高程系统有:大地高系统、正高系统、 正常高系统。
1.大地高系统
大地高系统是以地球椭球面为基准面的高程系统。 大地高的定义是:由地面点沿通过该点的椭球面法 线到椭球面的距离。也称为椭球高,一般用符号H表示。 大地高是一个纯几何量,不具有物理意义。同一个 点,在不同的基准下,具有不同的大地高。利用GPS, 可以测定地面点的WGS-84中的大地高。
ˆi i vi
得到如下误差方程
ˆ ˆ ˆ v1 a0 x1a1 y1a2 1 ˆ ˆ ˆ v2 a0 x2 a1 y2 a2 1 ............ ˆ ˆ ˆ vn a0 xn a1 yn a2 1
GPS高程与正常高的转换
T T
1
GPS高程与正常高的转换
五、高程拟合中的有关问题
1.适用范围
适用于高程变化较为平缓的地区(如平原地区)。
2.选择合适的高程异常已知点
所谓高程异常已知点的高程异常值,一般通过水准测量测定正 常高、通过GPS测定大地高。 重合点尽量多,均匀分布,最好将整个GPS网包围起来。
3.高程异常已知点的数量
y1 1 y2 2 l ,1 n, yn n
则可得到误差方程:
ˆ V BX l
设权阵为单位阵P=E,则得到法方程的解
ˆ BT PBX BT Pl 0
ˆ ( BT PB)1 BT Pl X
L L0 n
GPS高程与正常高的转换
四、常用的几种高程拟合方法
多项式拟合法几种模型
2. 二次多项式模型 (1)平面坐标函数形式
a0 a1x a2 y a3 x2 a4 y 2 a5 xy (4 4)
(2)经纬度函数形式
a0 a1B a2 L a3 B a4 L a5 BL (4 5)
ˆ a1 v2
ˆ a2
L 1
vm
ˆ a3
ˆ a4
T
ˆ a5
T
T
2
m
GPS高程与正常高的转换
五、多项式拟合实施步骤 (2)二次多项式拟合实施步骤
ˆ V Bx L
设权阵为P(可根据水准高程或大地高的精度确 定),则根据最小二乘原理,可得参数的解
ˆ x ( B PB) B Pl
GPS高程与正常高的转换
西安科技大学测绘学院 史经俭
GPS高程与正常高的转换
一、问题的产生 GPS能够提供地面点精确的三维坐标值(X, Y,Z和L,B,H)。其精度达10-7量级。 其高程信息是依赖于椭球面的,即是大地高。 而我国使用的高程是基于似大地水准面的正常 高。 为充分利用GPS的高程信息,研究利用GPS测 出的地面点的大地高求其正常高,成为GPS应用的 一个重要方面,也属于广义的坐标转换范畴。
五、多项式拟合实施步骤 (1)一次多项式拟合实施步骤 令
v1 1 ˆ a0 v2 ˆ 1 ˆ B V , a1 , X n ,1 3,1 n ,3 ˆ a2 v 1 n
x1 x2 xn
GPS高程与正常高的转换
五、多项式拟合实施步骤 (2)二次多项式拟合实施步骤
若存在m个公共点,则可列出m个平差值方程:
ˆ ˆ ˆ ˆ ˆ ˆ ˆ1 a0 x1a1 y1a2 x12 a3 y12 a4 x1 y1a5
2 2 ˆ ˆ ˆ ˆ ˆ ˆ ˆ2 a0 x2 a1 y2 a2 x2 a3 y2 a4 x2 y2 a5 .......... .. 2 2 ˆ ˆ ˆ ˆ ˆ ˆ ˆm a0 xm a1 ym a2 xm a3 ym a4 xm ym a5
三、GPS高程的实现方法 从前面的关系式可以看出,为;了由GPS高程 (大地高)确定出正高或正常高,需要有大地水 准面差距或高程异常数据,方可达到目的。获取 两者的方法有以下几种。
1. 等值线法
可以从全国高程异常图和大地水准面差距图 上通过内插法查求出点的hg(或ζ ) 。从而可得 Hg=H- hg;Hγ = H – ζ但要注意以下问题: (1)等值线图所适用的坐标系统,在求解正常高 或正高时,要采用相应的大地高数据。 (2)精度在很大程度上取决于等值线图的精度。
H常 H大
因此,如何求出a0、a1、a2是我们要解决的问题。
我们知道,如果有3个GPS/水准重合点,我们就可以得到3个点的 高程异常,从而列出以下的3个方程,解出3个系数,得到具体的求高 程异常的公式。
1 a0 x1a1 y1a2 a0 x1a1 y1a2 1 0 2 a0 x2 a1 y2 a2 ,或a0 x2 a1 y2 a2 2 0 a x a y a 0 3 a0 x3a1 y3a2 0 3 1 3 2 3
GPS高程与正常高的转换