第4章 振动系统的运动微分方程
汽车振动基础第4章-多自由度(定稿)
k11 k1 x1 k2 x1 k1 k2
k21 k12 k2 x1 k2
k22 k2 x2 k3 x2 k2 k3
j2
k31 k13 0
k32 k23 k3 x2 k3
0 k1 k 2 k 2 K k 2 k 2 k3 k3 0 k3 k3
– 拉格朗日法
• 方程的形式
广义坐标
qi (i 1, 2,3,, n)
T:系统的总动能
d T T ( ) Qi 0 dt qi qi
i 1, 2,3, , n
对应于第i个广义 坐标的广义力
– 保守系统
» 系统作用的主动力仅为势力 Qi
d T T U ( ) 0 dt qi qi qi
m2 m22 m3 4
④柔度矩阵的影响系数法
F ij
柔度影响系数 ij 的意义是在第j个坐标上施加单位力作用时,在第i个坐 标上引起的位移。 例题4-8 用影响系数法求图示系统的柔度矩阵
11 F 21 31
12 22 32
13 23 33
也可写成 其中
或
或
MX KX 0
力方程 位移方程
K 1MX X 0
m x 0 或 x
称为柔度,而
FMX X 0
1 称为柔度矩阵
1 k
FK
②刚度矩阵的影响系数法
K kij
刚度影响系数 k 的意义是使系统的第j个坐标产生单位位移,而其它的 ij 坐标位移为零时,在第i个坐标上所施加的作用力的大小。
仅代表外部激励 广义力
机械振动基础
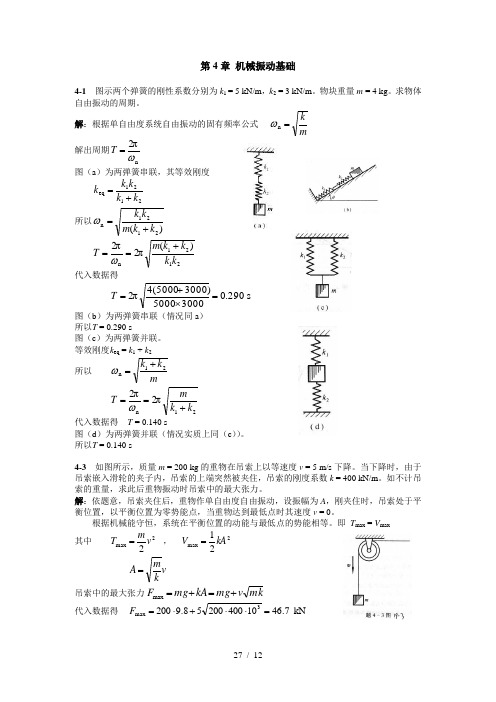
第4章 机械振动基础4-1 图示两个弹簧的刚性系数分别为k 1 = 5 kN/m ,k 2 = 3 kN/m 。
物块重量m = 4 kg 。
求物体自由振动的周期。
解:根据单自由度系统自由振动的固有频率公式 mk =n ω 解出周期 nπ2ω=T图(a )为两弹簧串联,其等效刚度 2121eq k k k k k +=所以 )(2121n k k m k k +=ω2121n)(π2π2k k k k m T +==ω代入数据得s 290.0300050003000)4(5000π2=⨯+=T图(b )为两弹簧串联(情况同a ) 所以 T = 0.290 s图(c )为两弹簧并联。
等效刚度 k eq = k 1 + k 2 所以 mk k 21n +=ω21nπ2π2k k mT +==ω代入数据得 T = 0.140 s图(d )为两弹簧并联(情况实质上同(c ))。
所以 T = 0.140 s4-3 如图所示,质量m = 200 kg 的重物在吊索上以等速度v = 5 m/s 下降。
当下降时,由于吊索嵌入滑轮的夹子内,吊索的上端突然被夹住,吊索的刚度系数k = 400 kN/m 。
如不计吊索的重量,求此后重物振动时吊索中的最大张力。
解:依题意,吊索夹住后,重物作单自由度自由振动,设振幅为A ,刚夹住时,吊索处于平衡位置,以平衡位置为零势能点,当重物达到最低点时其速度v = 0。
根据机械能守恒,系统在平衡位置的动能与最低点的势能相等。
即 T max = V max 其中 2max 2v m T = , 2max 21kA V =v km A =吊索中的最大张力 mk v mg kA mg F +=+=max 代入数据得 kN 7.461040020058.92003max =⋅⋅+⋅=F4-5 质量为m 的小车在斜面上自高度h 处滑下,而与缓冲器相碰,如图所示。
缓冲弹簧的刚性系数为k ,斜面倾角为θ。
(完整版)第四章晶格振动
➢研究的意义:利用晶格振动的理论解释晶
体的热学性质
➢研究的方法:
一维 格波 原子链 声子
三维 晶格
晶格振动与热 学性质之间的 关系
§1 一维原子链的振动
简谐近似:假设原子间的相互作用力仅存在于最近 邻原子之间,在简谐近似下,我们可以用 一个力 常数为k 的弹簧表示最紧邻原子间的相互作用。一 维情况下,原子的振动是纵向的。 一 独立简谐振动 二 简谐振动的耦合 (一)一维单原子链的振动 (二)一维双原子链的振动
—— 一维复式格子存在两种独立的格波
5 分析讨论
振动状态的传递
波矢q的取值
色散关系 两种格波的振幅 长波极限下的两种格波
1)振动状态的传递
Aei[t(2na)q] 2n
and
Be 2n1
i [t ( 2 n 1) aq ]
轻原子(质量为m)之间相互传递振动状态,相邻轻原 子之间的最小空间位相差为2qa。同样,相邻重原子 (质量为M)之间相互传递振动状态,其最小空间位相 差也是2qa。
5 讨论
un Aeiqnat
1) 格波与连续介质中弹性波的差别与联系
—— 格波和连续介质波具有完全类似的形式
—— 一个格波表示的是所有原子同时做频率为 的振动
➢ 差别:格波的空间坐标是离散的。
➢联系:在长波极限下,常用连续介质弹性波代替
较复杂的格波。(证明)
例1
证明在长波极限下,可用连续介质弹性波代 替较复杂的格波。
i[t (2n1)aq]
m2 A k(eiaq eiaq )B 2kA
M2B
k (eiaq
eiaq
)A
2kB
(2k m2 )A (2k cos aq)B 0
机械系统动力学 第四章 固有频率的实用计算方法
第4章 固有频率的实用计算方法
二、邓克利法(Dunkenley法)
对于多自由度振动系统,若用柔度法建立的运动微分 方程可表示为:
X MX
同样地令 X {u}sinnt
4-2-8
(I 2 M)u 0
I 2 M 0
特征方程
对于二个自由度系统:
1-211m1 -212m2 0 -221m1 1-222m2
若取 u1
{1
{u1}T {u1}T
K{u1} M {u1}
=
{1
1} k m
1} 0
k
1
0 1 2m 1
1 2 代入式4-2-7进行试算
k 0.定 于对振型的假设。计算 一阶固有频率精度较高
2k k 1
但数值偏大
若取
{1
2 n1
{u1}T {u1}T
K{u1} M {u1}
第4章 固有频率的实用计算方法
4-1 单自由度系统 一. 列方程法
单自由度无阻尼自由振动系统运动
mx kx 0
只要列出单自由度无阻尼自由振动系统的运动微分 方程,就可以得到振动系统的固有频率
n
k m
第4章 固有频率的实用计算方法
4-1 单自由度系统 一. 列方程法
例4-1-1:建立图4-1-1(a)所示的均质杆绕O点作微幅转 动振动系统的运动微分方程。
振动系统固有频率:
n
ka2 Jo
ka2 1 ml3 3
3ka2 ml 3
第4章 固有频率的实用计算方法
4-1 单自由度系统
二.能量法
原理:
对于单自由度无阻尼自由振动系统,其响应为简谐振
动位,置系,统势能T 为U0,c动ons能t 达或到最ddt大(T,U即) :0U
第4章 振动系统的运动微分方程

[
]
两边对时间求导数
3 &x & & mx&& = mgx − 2k (2 x + λ s ) x 2
注意到在静平衡位置满足 所以微分方程为
mg = 2kλ s
3 m&& + 4kx = 0 x 2
返回首页
Theory of Vibration with Applications
4.1 牛顿定律和普遍定理
返回首页
4.2 拉格朗日(Lagrange)运动方程 拉格朗日(Lagrange)
4.2.4 完整的保守系统的拉格朗日运动方程
例4-5 图示系统,摆的支点在水平方向受到弹性约束,其总 刚度为k,摆的质量为m,摆长为l。试用拉格朗日方程求出系 统的运动方程。 解: (1)选择x及θ 为广义坐标。 (2)动能及势能
4.1.4 普遍定理的综合应用
在有限路程中主动力的功为
∑ Wx0 − x = −mg ( x0 − x) +
1 2 k (2 x0 + λ s ) − (2 x + λ s ) 2 2
[
]
由动能定理的积分形式
T − T0 = ∑Wx0 − x
1 3 2 1 2 2 & ⋅ mx − T0 = − mg ( x 0 − x ) + k (2 x 0 + λ s ) − (2 x + λ s ) 2 2 2
∑ (F
n i =1
Theory of Vibration with Applications
x i δ xi
+ F y i δ y i + Fz i δ z i = 0
振动系统的运动微分方程题解
习 题3-1 复摆重P ,对质心的回转半径为C ρ,质心距转动轴的距离为a ,复摆由水平位置无初速地释放,列写复摆的运动微分方程。
解:系统具有一个自由度,选复摆转角ϕ为广义坐标,原点及正方向如如题4-1图所示。
复摆在任意位置下,根据刚体绕定轴转动微分方程 O O M J =ϕ其中)(22a gP J C O +=ρ 得到复摆运动微分方程为 ϕϕρcos )(22Pa a gP C =+ 或0cos )(22=-+ϕϕρga a C3-2均质半圆柱体,质心为C ,与圆心O 1的距离为e ,柱体半径为R ,质量为m ,对质心的回转半径为C ρ,在固定平面上作无滑动滚动,如题3-2图所示,列写该系统的运动微分方程。
解:系统具有一个自由度,选θ为广义坐标。
半圆柱体在任意位置的动能为:222121ωC C J mv T +=用瞬心法求C v : 2222*2)cos 2()(θθθ Re R e CC v C -+== θω =2C C m J ρ=故2222221)cos 2(21θρθθ Cm Re R e m T +-+=系统具有理想约束,重力的元功为题3-1图题3-2图θθδd mge W sin -= 应用动能定理的微分形式W dT δ=θθθρθθd mge m Re R e m d C sin 21)cos 2(2122222-=⎥⎦⎤⎢⎣⎡+-+ θθθθθθθθθθρd mge d mRe d mRe d R e m C sin sin cos 2)(2222-=+-++ 等式两边同除dt ,θθθθθθθθθθρ sin sin cos 2)(2222mge mRe mRe R e m C -=+-++ 0≠θ ,等式两边同除θ故微分方程为0sin sin )cos 2(2222=+++-+θθθθρθmge mRe Re R e m C ①若为小摆动θθ≈sin ,1cos ≈θ,并略去二阶以上微量,上述非线性微分方程可线性化,系统微摆动的微分方程为0])[(22=++-θθρge r R C要点及讨论(1)本题也可以用平面运动微分方程求解。
振动力学基础
k1 = k2 = 2k0
k0 4k0 ϖ= =ϖ0 ϖ = = 2ϖ 0 m m
例. 质量为m的比重计,放在密度为 ρ 的液体中。已知比 重计圆管的直径为d。试证明,比重计推动后,在竖直方向 的运动为简谐振动,并计算周期。 解: 取平衡位置为坐标原点 平衡时: mg 浮力:
−F =0
F
F = ρ Vg
o
2
2
d πρg ω= 2 m
x
x
k的轻弹簧、一 例.如图所示,振动系统由一倔强系数为 如图所示,振动系统由一倔强系数为k 半径为 R、转动惯量为 J的定滑轮和一质量为 m的物体所 半径为R 转动惯量为J 的定滑轮和一质量为m 组成。使物体略偏离平衡位置后放手,任其振动,试证 物体作简谐振动 . 物体作简谐振动. 解:取位移轴 ox , 解:取位移轴ox ox, m的平衡位 原点在 原点在m m在平衡位置 置。 置。m 时,设弹簧伸长量 : 为∆l,则有 ,则有:
x1
x2
1 1 1 2 2 2 m1v1 + m2 v2 + kx = c 2 2 2
m1v1 + m2v2 = 0 x = x2 − x1 − l
dv1 dv2 dx m1v1 + m2 v2 + kx =0 dt dt dt
d ( x2 − x1 −l) dv1 dv2 mv +mv +k ( x2 − x1 −l) =0 11 11 dt dt dt dv1 dv2 k − + ( x2 −x1 −l)( v2 −v1) =0 dt dt m v1
o
其中 V 为比重计的排水体积
mg
2 ⎡ ⎤ d x ⎛d ⎞ mg − ⎢V + π ⎜ ⎟ x ⎥ ρ g = m 2 2 d t ⎝ ⎠ ⎢ ⎥ ⎣ ⎦ 2 2 d x ⎛d ⎞ mg − ρ Vg − ρ gπ ⎜ ⎟ x = m 2 dt ⎝2⎠
《机械振动》张义民—第4章第1、2节ppt
◆当振动系统需要两个独立坐标描述其运动时, 那么这个系统就是两个自由度系统。
◆两自由度系统是最简单的多自由度系统。 ◆两自由度系统的振动微分方程一般由两个联立 的微分方程组成。 ◆两自由度系统有两个固有频率及固有振型。
◆在任意初始条件下的自由振动一般由这两个固 有振型叠加,只有在特殊的初始条件下系统才按某 一个固有频率作固有振动。
大象体积庞大,走起路来 更是别具一格,四只脚移动 时分别各自相差90度的位移 差。没有一只脚做的是相同 位移的移动。
◆四只脚动物可以看作是“四个振动体耦合在一起的 系统”吗?事实上,四个振动体组成的系统的基本运动 模式,确实与所提到的那四种走路方式一模一样。
◆可是动物们为什么会按照耦合振动体的方式来行走 呢?虽说现在关于这个问题还没有定论。生物学家们认 为,掌管运动的脑神经网(由数突连接起来的神经细胞) 看起来更接近“耦合振动体”一些。有推测认为,正是 脑神经网的动力学特性,使得动物走起路来才会表现出 振动体的特点。
1998年匈牙利的物理学家塔 马斯·维塞克在布达佩斯音乐学 院举行的一场音乐会上意外地发 现了同步化的现象。
演出相当成功,落幕后观众们热烈的掌声长达 3分钟之久,而维塞克博士便在这里发现了有趣 的东西。音乐会刚一结束,观众们雷鸣暴雨般的 掌声响起,然而过了一段时间之后,观众们的热 烈的掌声显然同步化了,变成了同一种节奏的拍 手。为了答谢观众们的热情,演奏者重新走上台 来谢幕,这时的掌声又突然之间失去了刚才的节 奏,雨点般疯狂地响起。在最后长达3分钟的鼓 掌声中,狂热的掌声和同步的掌声依次交替出现。
◆强迫简谐振动发生在激励频率,而这两个坐标 的振幅将在这两个固有频率下趋向最大值。共振时 的振型就是与固有频率相应的固有振型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(d)
分析杆 AB ,列写 AB 的运动微分方程,如图(c)
m2 &x&C = − X A
(e)
m2 &y&C = −YA − m2 g
(f)
1 12
m2l 2ϕ&&
=
X
A
l 2
cosϕ
+ YA
l 2
sin ϕ
(g)
运动学方程
xC
=
xA
+
l 2
sin
ϕ
,
x&C
=
x& A
+
l ϕ& cosϕ 2
yC
=
−
l cosϕ , 2
y& C
=
l ϕ& sinϕ 2
&x&C
=
&x&A
−
l ϕ& 2 2
sin ϕ
+
l ϕ&& cosϕ 2
(h)
&y&C
=
l ϕ&& sin ϕ 2
+
l ϕ& 2 2
cos ϕ
(i)
上述 9 个方程包含 &x&A ,ε , &x&C , &y&C ,ϕ&&, X A ,YA , F, N 等 9 个未知量,由上述 9 个方程消去
解:系统具有两个自由度,选图示 AB 与铅垂线的夹角ϕ 及圆轮中心 A 的位移 xA 为广
义坐标。
分析圆轮 A ,受力图如图(b)所示。列写圆轮 A 的运动微分方程:
m1&x&A = X A − F
(a)
0 = YA + N − m1g
(b)
1 2
m1 R 2ε
=
FR
(c)
运动学方程
&x&A = Rε
t = 0 , x = x0 , x& = x&0
系统的主动力图如图所示。
图 4-2 振动问题
在有限路程中主动力的功为
∑ [ ] Wx0−x
=
−mg ( x0
−
x) +
1k 2
(2 x0
+ λs )2
− (2x + λs )2
由动能定理的积分形式
72
∑ T − T0 = Wx0 −x
T0 为初始位置系统的动能。
4.2 拉格朗日(Lagrange)运动方程
4.2.1 虚位移原理
在力学中遇到的第一个变分原理是虚位移原理。它是处理力学系统平衡问题的最基本原 理,也是分析力学的基础。
虚位移是指满足固定在某一时刻的约束条件的、假象的、任意的、无限小位移。对可变 形系统,虚位移必须满足变形连续条件。即一个系统的虚位移就是这个系统的广义坐标的变 分。
假设一个系统的广义坐标是( q1, q2 ,L, qλ ),其间存在非定恒的完整约束
φk (t; q1 , q2 ,L, qλ ) = 0
(k = 1, 2, L, m)
若给系统的位形一虚位移δq,那么,根据定义,虚位移必定在约束面上,即
(4-6)
φk (t, q1 + δq1 , q2 + δq2 ,L, qλ + δqλ ) = 0 将式(4-7)按泰勒级数展开,得到
d2r m
=
ΣF
dt 2
(4-1)
(2)直角坐标形式
m
d2x dt 2
=
ΣFx ,
m
d2 y dt 2
=
ΣFy ,
m
d2z dt 2
=
⎫ ΣFz ⎬
⎭
(4-2)
上式是将式(4-1)投影到直角坐标系的各轴上得到的。
(3)自然轴系形式
m dv dt
=
∑
Fτ
,
m
v2 ρ
=
∑
Fn
,
0
=
∑
Fb
⎫ ⎬
⎭
(4-3)
4.1.2 质点系动能定理的微分形式
设质点系由 n 个质点组成,其在理想约束的条件下,质点系动能的微分等于作用在质点 系的主动力的元功之和。有
dT = Σ δWF
(4-4)
其中, δWiF 表示作用在质点系上主动力的元功, dT 表示质点系动能的微分。
70
4.1.3 刚体平面运动微分方程
刚体的平面运动可简化为具有相同质量的平面图形在固定平面内的运动。应用质心运动
例 4-1 均质鼓轮重 P1 ,半径为 R ,对转动轴的回转半径为 ρ ,在半径为 r 的轴颈上绕 一不可伸长的细绳,绳端系一重为 P2 的重物。可变形的细绳简化为一弹性刚度系数为 k 的
弹簧绕于轮缘上,如图 4-1(a)所示。试写系统运动微分方程。
图 4-1 振动系统
解:以鼓轮及重物组成的系统为分析对象。 系统具有一个自由度,选鼓轮转角ϕ 为广义坐标,顺时针为正,零点位于弹簧静变形 处,即在静平衡位置满足 kR 2ϕ s = P2r 当ϕ 取任意值时系统的受力图如图 4-1(a)所示。由质系对固定点的动量矩定理建立
若以鼓轮为分析对象,鼓轮的受力图如图(b)所示,此时鼓轮与重物间细绳的拉力变 为外力。列写鼓轮作定轴转动的微分方程
P1 ρ 2ϕ&& = Tr − FR
(b)
g
F = kR(ϕs + ϕ )
(c)
方程中包括未知拉力 T ,欲消去 T 还必须分析重物,重物的运动方程为
P2 g
rϕ&&
=
P2
−
T
(注意: T ≠ P2 )
(k = 1, 2, L, m)
展开式(5-10),略去高次项后,得到实位移应满足的条件为
(4-10)
dφ k
=
∂φ k ∂q1
dq1
+
∂φ k ∂q 2
dq 2
+L +
∂φ k ∂qλ
dqλ
+
∂φ k ∂t
dt
=0
(k = 1, 2, L, m)
(4-11)
从式(4-9)与式(4-11)中可以看出,满足式(4-11)的 dq 不可能满足条件式(4-9), 也就是说,在这种情况下,系统的实位移与虚位移是不同的。
cosϕ
(k)
+
1 2
m2lϕ&
2
sin ϕ
cosϕ
+
m2 g sinϕ
=
0
将(j)式代入(k)式,化简后得
2 3
lϕ&&
+
&x&A
cosϕ
+
g
sin ϕ
=
0
(l)
式(j)(l)为系统的运动微分方程。
要点及讨论 运用平面运动微分方程求解刚体动力学问题时,需分别分析每个刚体的运动与受力,列
写每个刚体的运动微分方程及补充的运动学方程。未知量的数目应与方程的数目相等。联立 求解所列写的方程,即可得到所要求的结果。
约束的质点系,在给定位置保持平衡的必要和充分条件是:所有作用于该质点系上的主动力
在任何虚位移中所作的虚功之和等于零。即
n
∑ Qiδqi = ∑δ WF = 0
i =1
系统的运动微分方程。
解:系统具有一个自由度,建立广义坐标 x ,坐标原点位
于弹簧具有静伸长时圆盘中心的静平衡位置,坐标正方向如图
中所示。 x 取任意值时,系统的动能为
T
=
1 2
mvC2
+
1 2
JCω 2
=
1 2
mx& 2
+
1 2
⋅
1 2
mR 2
x& 2 R2
故
T = 1 ⋅ 3 mx& 2 22
设初始条件为
=
1 2
k(2x0
+
λs )2
−
mg ( x0
+
λs )
V
=
1 2
k(2x
+
λs )2
− mg(x
+ λs )
方程为
1 2
⋅
3 2
mx& 2
+
1 2
k(2x
+
λs )2
−
mg ( x
+
λs
)
=
T0
+
1 2
k (2 x0
+
λs
)2
−
mg ( x0
+
λs )
整理后与方程(a)相同。
若选静平衡位置处为势能零点,则方程为
[ ] 1
2
⋅
3 2
mx& 2
− T0
=
−mg ( x0
−
x) +
1k 2
(2 x0
+ λs )2
− (2x
+ λs )2
(a)
两边对时间 t 求导数
3 2
mx&&x&
=
mgx&
−
2k
(2x
+
λs
)
x&
注意到在静平衡位置满足
所以微分方程为
mg = 2kλs
3 m&x& + 4kx = 0
(b)
2
要点及讨论
(4-8)
δφ k