第二章-单自由度系统的自由振动-yyt
第二章 单自由度系统振动的理论及应用

M t
则得
2 .. n 0
通解为:
A sin(n t 0 )
代入:
将振动的初始条件t= 0 , 0 , . 0.
A
.0 2 0 2 n
2
n 0 0 arctan . 0
例: 已知:质量为m=0.5kg的物体沿光滑斜面无初速度滑下。 当物块下落高度h=0.1m时,撞于无质量的弹簧上, 并与弹簧不再分离,弹簧刚度系数k=0.8kN/m。 倾角 30 求:此系统振动的固有频率和振幅并给出物块的运动方程。
计算固有频率的能量法
无阻尼自由振动系统没有能量的损失,振动将永远持续下去. 在振动过程中,系统的动能与弹簧的势能不断转换,但总的机械能 守恒.因此,可以利用能量守恒原理计算系统的固有频率. 如图所示无阻尼振动系统 当系统作自由振动时,运动规律为:
x A sin(0t )
速度为:
dx v 0 A cos(0t ) dt
称为单自由度线性纵向振动系统的运动微分方程式,又称单 自由度有粘性阻尼的受迫振动方程.
可分为如下几种情况进行研究:
(1)当c=0,F(t)=0时, 该方程为单自由度无阻尼自由振动方程.
(2)当F(t)=0时, mx cx kx 0 该方程为单自由度有拈性阻尼的自由振动方程.
.. .
mx .. kx 0
由机械能守恒定律有
Tmax Vmax
即
1 1 2 2 J 0 Φ ( k1l 2 k 2d 2 )Φ 2 2 2
解得固有频率
0
k1 l 2 k 2 d 2 J
例: 已知:如图表示一质量为m,半径为r的圆柱体,在一半 径为R的圆弧槽上作无滑动的滚动。 求:圆柱体在平衡位置附近作微小振动的固有频率。
振动单自由度系统的振动 PPT课件
例3 品質彈簧系統,W=150N,st=1cm , A1=0.8cm,
A21=0.16cm。 求阻尼係數μ 。
解:n
g
st
9.8 31.3rad / s 0.01
A21 A2 A3 A21 (e ) nT1 20
A1 A1 A2
A20
0.16 (enT1 )20 0.8
ln( 0.16) 0.8
由 dHI
dt
mI (F )
,
有
(
3 2
M
m)Rx
4k xR
振動微分方程:
x
8k 3M
2m
x
0
固有頻率:
n
8k 3M 2m
1
解2 : 用機械能守恆定律 以x為廣義座標(取靜平衡位置為 原點)
T 1 Mx2 1 MR2 ( x )2 1 mx2
2
22 R 2
1 ( 3 M m)x2 22
1
§12-2 單自由度系統的有阻尼自由振動
自由振動是簡諧運動,振幅不隨時間而變。但實際中振 動的振幅幾乎都是隨時間逐漸減小的(也稱為衰減振動), 這是因為有阻尼。 一、阻尼的概念:
阻尼:振動過程中,系統所受的阻力。
粘性阻尼:在很多情況下,振體速度不大時,介質粘性引起 的阻尼力與速度的一次方成正比,這種阻尼稱為粘性阻尼。
mg F mx
F k(x st ) st — 振体静止平衡时弹簧的 变形:mg k st
1
mx mg F mg k(x st ) kx
令
2 n
k m
则:x
2 n
x
0
這就是品質——彈簧系統無阻尼自由振動的
微分方程。
對於其他類型,同理可得。如
《单自由度系的振动》课件

主动控制技术广泛应用于航空航天、机械制造、土木工程等领域, 以减小或消除结构的振动。
优势与局限性
主动控制技术的优点在于能够快速响应并有效抑制振动,但需要外部 能源和复杂的控制系统,增加了系统的复杂性和成本。
被动控制技术
被动控制技术定义
被动控制技术是利用阻尼材料或结构来吸收或耗散振动能量的方 法。
弹性力学模型
描述弹性体的振动特性,适用于弹性体的振动。
振动分析的数值方法
有限元法
将系统离散化为有限个单元,求解每个单元的振动响应。
时域法
在时间域内直接求解系统的振动响应。
频域法
将系统振动问题转化为频率域内的问题,求解系统的振动特性。
04
单自由度系统的振动控 制
主动控制技术
主动控制技术定义
主动控制技术是一种通过向系统提供反向振动来抵消原始振动的方 法。
03
单自由度系统的振动分 析
振动分析的基本方法
解析法
通过数学公式推导,求解系统的振动特性。
实验法
通过实验测量系统的振动响应,分析其特性 。
数值法
利用数值计算方法,求解系统的振动响应。
振动分析的数学模型
线性模型
描述线性系统的振动特性,适用于小振幅振动。
非线性模型
描述非线性系统的振动特性,适用于大振幅振动 。
总结词
在机械系统中,振动控制是提高设备稳定性和延长使用寿命 的关键。
详细描述
机械系统中的许多设备,如发动机、压缩机、机床等,都容 易受到振动的影响。通过采用适当的控制策略,如主动或被 动隔振、阻尼减振等,可以有效减小振动对设备性能的影响 ,提高设备的稳定性和可靠性。
建筑结构中的振动控制
第二章单自由度系统的自由振动

f=1/T。
n
n —— 固有频率,振体在2秒内振动的次数。
反映振动系统的动力学特性,只与系统本身的固有 参数有关。
8
无阻尼自由振动的特点是: (1) 振动规律为简谐振动;
(2) 振幅A和初相位 取决于运动的初始条件(初位移和初速度); (3)周期T 和固有频率 n 仅决定于系统本身的固有参数(m,k,I )。
重物匀速下降时处于静 平衡位置,若将坐标原点取在绳被卡住瞬时重物所 在位置,则t=0时有:
x0 0 x0 v
其振动规律为: x x0 cos nt
n
x0
sin nt
13
解:
x0 0 x0 v
根据:
x x0 cos nt
n
x0
sin nt
1 ( 3 M m) x 2 2 2
以平衡位置为计算势能的零位置, 并注意轮心位移x时,弹簧伸长2x
U k [( st 2 x) 2 st 2 ] ( M m) gx 2 2kx2 2k st x ( M m) gx
因平衡时
2k st x (M m) gx
O l C mg
16
解:取图示坐标系,将直升机桨叶视为一物 理摆,根据绕固定铰的动量矩定理得到其 摆动微分方程
J 0 mgl sin
O l C mg
sin
n
mgl , J0
J0 mgl 0
J0 Tn 2 mgl
mgl J0 2 Tn2 4
m Tn 2 n k 2
固有周期
k / m g / s
10
固有频率及固有周期
k g wn m s
第二章 单自由度系统振动

mgcos(90 ) 0 m
m
90
mg
g Sin 0
为非线性方程
微振动时: sin g 0 为线性方程 l
第二节 无阻尼自由振动(1)
一、运动方程: 质点仅在弹性恢复力作用下运动
A x
2 0
2 0 x 2 n
, tg
1
n x0
0 x
此无重弹性梁相当于弹簧,其静变形相当于弹簧的静 变形,故: x F
n
g
st
70 rad/s
mg
st
O
初始条件: x0 2mm,
2 0 2
0 0 x
0 / n ) 2mm A x (x
七、固有频率的计算方法 1.运动微分方程法
2 x n x0
2.静变形法
n
k kg g m mg s
k
m
3.能量法
x A sin(nt )
Tmax 1 2 mA2n 2
1 2 kA 2
x
1 2 1 mA2n 2 cos 2 (nt ) T mx 2 2
A D D2
2 1 2
(5)
tg 1
D1 D2
式中:
三、对初始条件响应 t 0 x 0 设初始条件为: x t 0 x0 , x
代入(4)或(5)得:
x x0 cos nt
, t g
则 A x
2 0
2 0 x 2 n
n A sin(nt )
1t
2t
∴
第二章 单自由度系统的自由振动
35
第二章 单自由度系统的自由振动
方程的特征根为: 讨论在阻尼比ξ取值不同时,微分方程解 (1)小阻尼情况,即ξ<1:
此时特征方程的根:
的性质。
微分方程的解为:
设:
,考虑初始条件t=0时,有
,
,将其
代入微分方程的解中,有
t=0时
求解 得到
36
第二章 单自由度系统的自由振动
为:
T
1
•
m(l )2
2
U 1 k(a)2
2
平衡位置时: kas mgl
d
1 2
ml 2
•
2
1 2
k
(a
)
2
0
dt
••
k
(a)2
0
ml
n
a l
k m
T
2 n
2l
a
m k
22
第二章 单自由度系统的自由振动
2.3 瑞利法
8
第二章 单自由度系统的自由振动
例题讲解3 重物落下,与简支梁做完全非弹性碰撞
梁长 L,抗弯刚度 EJ m
h
l/2
0
l/2
求: 梁的自由振动频率和最大挠度
第二章 单自由度系统的自由振动
解: 取平衡位置 以梁承受重物时的静平衡位 置为坐标原点建立坐标系
静变形 由材料力学 : mgl3
48EJ
1 2
m2
(
l2 l1
x)2
1 2
第二章 单自由度体系的振动 (2)经典.ppt

.......... .(c)
my(t) y 0
I(t)
1
可得与 (b) 相同的方程
k
刚度法常用于刚架类结构,柔度法常用于梁式结构。
2.1.2 单自由度体系自由振动微分方程解答
my ky 0 .......... .......... .......... ......( b)
改写为 y k y 0 m
( 2 2 ) Asint F sint
m
y
F
m( 2 2 )
sin t
特解:y Asint
A
F
m( 2 2 )
方程通解:
y
C1
sin t
C2
cos t
F
m(2
2)
sin t
Page 24
其中:C1、C2 由初始条件确定,若: y(0) 0, y(0) 0
C1
F m(2
2 )
这条曲线仍具有衰减性, 但不具有波动性。
t
1 临界阻尼常数为: cr 2m (3) 1 (超阻尼)
临界阻尼比为: c
cr
体系不出现振动,很少遇到,不予讨论。
y0
Page 21
2.2单自由度体系的强迫振动
2.2.1 单自由度体系强迫振动微分方程的建立 2.2.2 简谐荷载作用下结构的动力反应 2.2.3 一般荷载作用下结构的动力反应 2.2.4 阻尼对受简谐荷载强迫振动的影响 2.2.5 有阻尼时的杜哈梅积分
它表示合成运动仍是一个简谐运动。其中A和可由下式确定
振幅 相位角
A
y2
v
2
. . . . . . . . .... . . . . . . .... . . . . . . . (g )
第2章 单自由度系统的自由振动
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
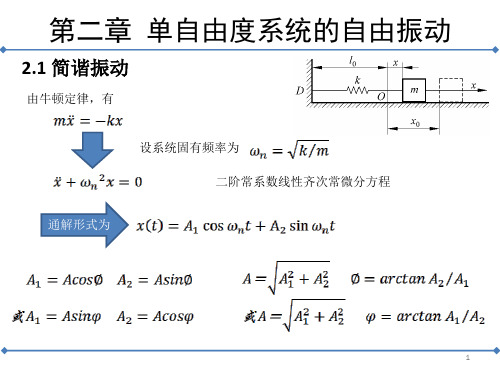
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.3 单自由度无阻尼自由振动—作业
水塔塔身的高度为300ft,材料为钢筋混凝土,内外径分 别为8ft和10ft,装满水时水塔的重量为6*105lbf。钢筋 混凝土的弹性模量为4*106lbf/in2 ,忽略塔身的质量。求 (1)水塔横向振动的固有频率; (2)若横向初始位移为10in,则由其引起的振动响应; (3)水塔的最大速度和加速度。
质量元件
平动:
力矩和周期已知
O l C mg
Fm mx
Tm J
力、质量和加速度的单位分别为N、kg和m / s 2。
转动:
图 用振动测量方法求
桨叶的转动惯量 力矩、转动惯量和角加速度的单位分别为Nm、kg m 2和rad / s 2 .
23
2.3 单自由度无阻尼自由振动—实例
解: 由动量矩定理得
力矩和周期已知
O l C mg
(t ) mgl sin (t ) J o
sin
(t ) mgl (t ) 0 J o
n
mgl Jo
Jo mgl
图 用振动测量方法求
桨叶的转动惯量
mgl 2 Jo T 2 n 4
Tn 2
24
(2)最大位移位置 T 0 ; V Vmax 机械能守恒
Tmax Vmax
2 2 max mx kxmax
即
max vmax k x n m xmax A
固有频率
28
能量方法:
例 一倒置的摆,杆质量不计,假设起转动惯量为I, 求做微幅振动时摆的固有频率。
机械能守恒
x(t ) A sin(nt )
振幅 频率 初相位
振幅:
A
x 0 x n
2 0
2
简谐运动的三要素
•
n x0 arctan 初相位: 0 x
在简谐运动三要素中,哪些参数是系统的固有参数?哪些参数是依赖于外部条件 的参数? 无阻尼的质量弹簧系统受到初始扰动后,其自由振动是以 n 为振动频率的简谐振 动,并且永无休止; 初始条件是外界能量注入的一种方式,有初始位移即注入了弹性势能,有初始速 度即注入了动能。
kx 0 m x
振动微分方程
27
能量方法:
对无阻尼系统,即无能量损失,可以根据机械能守恒原理直接推导 出系统的振动微分方程或者直接求取系统的固有频率。
证明: 考虑两个特殊位置上系统能量
(1)静平衡位置 T Tmax
1 2 max ; V 0 mx 2 1 2 kx max 2
当F(t)≠0: 强迫振动
牛顿第二定律:物体动量的 微分方程
同学们试采用达朗贝尔原理、虚位移原理及能量 守恒原理推导一下图示振动系统的运动微分方程。
F(t)
10
2.2 微分方程齐次微分方程通解的求法—特征根法
(t ) bx(t ) 0 x(t ) ax
如将坐标原点设在卡住瞬时位置,则
则振动解: x ( t )
v
0 v x0 0 ; x
n
sin(n t ) 1.28sin(19.6t ) (cm )
绳中最大张力为静张力与最大动张力之和:
Tmax W kA 1.47105 0.74105 2.21105 ( N )
振动理论与声学原理
第二章 单自由度系统的自由振动
牛顿(1643年1月4日—1727年3月31日)是一 位英国物理学家、数学家、剑桥大学数学教授 、英国皇家学会主席。他在1687年发表的论文 《自然哲学与数学原理》里,对万有引力和三 大运动定律进行了描述。这些描述奠定了此后 三个世纪里物理世界的科学观点,并成为了现 代工程学的基础。
统的振动理论就可以得到满意的结果。
3. 单自由度系统的基本概念具有普遍意义。多自由度系统和无限自由 度系统的振动,在特殊的坐标系中考察时,显示出与单自由度系 统类似的性态。
k
弹簧-质量系统就是一个典型的单自由度系统
m x
8
2.2 运动微分方程
根据牛顿第二定律
(t ) F (t ) Fd (t ) Fs (t ) m x
2
max
1 m gl 2 2 2
ka2 m gl n I
30
等效质量和等效刚度法:
2l 3 l 3
当杆件顺时针转动角度θ时, 弹簧产生压缩变形,质量块上 升,而杆件发生了转动。
刚性连接
杆的质量为:m
M
k
转动时的动能计算公式为
2l 3
l 3
1 2 T J 0 2
其中J0为杆件的转动惯量。
2 n
k n m
固有频率
该二阶常系数齐次方程的通解为:
x(t ) X1 cosnt X 2 sin nt
初始条件
(0) x 0 x(0) x0 , x
X1 x0 , X 2
单位:rad/s
n
0 x
自由振动:
x(t ) x0 cos nt
n
0 x
m
25
2.4 求单自由度无阻尼系统固有频率的方法
① 微分方程法:
运动微分方程 ② 能量方法: 系统的固有频率
Tmax Vmax
③ 等效质量和等效刚度法:
系统的固有频率
T
V
④ 静变形法:
等效质量 meq 等效刚度 keq
n
keq meq
26
能量方法:
对无阻尼系统,即无能量损失,可以根据机械能守恒原理直接推导 出系统的振动微分方程或者直接求取系统的固有频率。
x(t ) A sin(nt )
A x 0 x n
2 0 2
k
m
振幅:
v0
k
v0
k0
固有频率
k n m
m
v0
19
2.3 单自由度无阻尼自由振动—实例
例1:升降机笼的质量为 m ,由钢丝绳牵挂以等速度 v0 向下运动。 钢丝 绳的刚度系数为 k ,质量可忽略不计。如果升降机运行中急刹车,钢丝绳上 端突然停止运动,求此时钢丝绳所受的最大张力。 v0 解: x0 0 k
15
•
•
2.3 单自由度无阻尼自由振动--谐波(简谐)振动
n :
A、 :
n
16
2.3 单自由度无阻尼自由振动--谐波(简谐)振动
17
上节课知识回顾
振动问题有哪几类,解决振动问题的方法
有哪些? 单自由度无阻尼振动系统的特点是什么?
18
2.3 单自由度无阻尼自由振动—实例
例1:升降机笼的质量为 m ,由钢丝绳牵挂以等速度 v0 向下运动。 钢丝 绳的刚度系数为 k ,质量可忽略不计。如果升降机运行中急刹车,钢丝绳上 端突然停止运动,求此时钢丝绳所受的最大张力。 v0
x(t ) Cest
特解形式
(s as b)e 0
2 st
(s as b) 0
2
s1 , s2
特征值
特征方程
特征根 不相等实根 相等实根
s
s1 s2 s1 s2
通解形式
共轭复根
s1,2 i
x(t ) C1es1t C2es2t x(t ) es1t (C1 C2t ) x(t ) et (C1 cos t C2 sin t )
x(t ) A sin(nt )
振幅: A
arctan 初相位:
固有频率
x 0 x n n x0
2 0
2
x 0
n
k m
21
2.3 单自由度无阻尼自由振动—实例
例2 提升机系统。重物W=1.47x105N,钢丝刚度k=5.78x104N/cm。重物以 v=15m/min的速度匀速下降,求绳的上端突然卡住时, (1)重物的振动频率;(2)绳中最大张力。 gk 解:振动(自然)频率 n 19.6 rad / s W
Tmax Vmax
29
零平衡位置
能量方法:
解:广义坐标θ,平衡位置设置零坐标如图
显然,系统的振动方程为: (t ) cos(nt ) θ
(t ) sin( t ) 则,角速度为: n n
有 max 最大动能 Tmax
max n
n
m
(振幅)
0 v0 x
0 x
m k
k
m
k
A
2 x0 (
n
) 2 v0
v0
v0
(钢丝绳最大动张力)
Td kA v0 mk
(钢丝绳总张力的最大值)
k0
T mg v0 mk
m
v0
20
2.3 单自由度无阻尼自由振动—实例
例2 提升机系统。重物W=1.47x105N,钢丝刚度k=5.78x104N/cm。重物以 v=15m/min的速度匀速下降,求绳的上端突然卡住时, (1)重物的振动频率;(2)绳中最大张力。
刚性连接
杆的质量为:m
M
k
31
等效质量和等效刚度法:
1 V keq x 2 2
2
2l 3
l 3
1 2 T meq x 2
刚性连接
杆的质量为:m
1
2
授课内容
基本概念 微分方程求解方法回顾 单自由度无阻尼自由振动特性分析 求解无阻尼系统固有频率的方法 单自由度有阻尼自由振动 有阻尼自由运动微分方程的建立
3
2.1 基本概念
研究对象 单自由度系统