4坐标系中的旋转变换(2016年)
旋转的力旋转变换的认识
旋转的力旋转变换的认识旋转是物体围绕某一中心点或轴线进行的转动运动。
在自然界和人类日常生活中,旋转现象无处不在。
旋转不仅是一种基本的物理现象,也是许多领域中重要的概念,如力学、电磁学、光学等等。
本文将探讨旋转的力以及旋转变换的认识。
一、旋转的力力是物体产生运动或形态变化的原因。
在旋转现象中,旋转的力是使物体发生转动的力量。
旋转的力可分为两种情况:外力和内力。
外力是指作用在物体上并使其围绕某一中心点或轴线进行旋转的力量。
外力通常通过作用在物体上的力矩来实现。
力矩是力在转动物体上的产生力矩大小与力臂长度的乘积。
当外力与物体的力臂垂直时,力矩最大;当外力与物体的力臂平行时,力矩为零。
根据牛顿第一定律,旋转的物体会保持其旋转状态,直到受到力矩的影响而改变。
内力是物体内部分子或分子团的相互作用力。
在旋转现象中,内力的存在会影响物体的转动。
例如,一个刚性物体的内部分子间的作用力可以导致物体整体进行旋转。
此外,内力还可以改变物体的转动轴线或转动速率。
旋转的力与直线运动的力有一些不同之处。
在直线运动中,力可以直接作用在物体的质心上,而在旋转中,力必须作用在物体上的某一点上才能产生转动效果。
这一点被称为转动轴。
通过合理施加外力,可以改变旋转的角速度和转动轴的位置。
这也是旋转变换的重要概念。
二、旋转变换的认识旋转变换是指将一个坐标系中的向量或物体转换到另一个坐标系中的过程。
旋转变换通常涉及到旋转轴、旋转角度和旋转中心等要素。
在二维平面中,旋转变换可以通过旋转矩阵来表示。
旋转矩阵是一个二阶方阵,用于描述二维平面上点的旋转变换。
旋转矩阵的每个元素与旋转角度、旋转中心和旋转轴等因素相关。
在三维空间中,旋转变换也可以通过旋转矩阵来表示。
旋转矩阵是一个三阶方阵,用于描述三维空间中点或物体的旋转变换。
旋转矩阵的构造方法和二维平面中的类似,但需要更多的参数来描述旋转变换。
旋转变换有许多应用领域,如计算机图形学、航空航天技术、机器人学等。
苏教版选修4《极坐标系中的旋转变换》说课稿
苏教版选修4《极坐标系中的旋转变换》说课稿引言《极坐标系中的旋转变换》是苏教版选修4中的一篇数学课文,本篇课文通过介绍极坐标系中的旋转变换,旨在帮助学生理解极坐标系的概念及其在几何图形中的应用。
通过本课文的学习,学生将能够掌握极坐标系中的旋转变换的基本概念、方法和相关运算,并能够运用所学知识解决实际问题。
一、学情分析本节课内容适用于高中数学选修课程,学生已经掌握了直角坐标系和极坐标系的基本概念及其转换关系。
对于旋转变换这一概念,学生可能有一些模糊的认识,但他们已经学习了平面向量相关内容,对于向量的旋转有一定的了解。
因此,本课将通过对比向量的旋转和极坐标系中的旋转变换,帮助学生更深入地理解极坐标系中的旋转变换。
二、教学目标通过本节课的学习,学生将能够: 1. 理解极坐标系中的旋转变换的概念; 2. 掌握极坐标系中的旋转变换的基本方法;3. 能够运用极坐标系中的旋转变换解决几何问题;4. 培养学生的逻辑思维和几何推理能力。
三、教学重点与难点1. 教学重点•极坐标系中的旋转变换的概念和基本方法;•运用极坐标系中的旋转变换解决几何问题。
2. 教学难点•极坐标系中的旋转变换与向量的旋转的比较;•运用极坐标系中的旋转变换解决复杂的几何问题。
四、教学过程步骤一:导入与引入(5分钟)1.引导学生回顾直角坐标系与极坐标系的基本概念及其转换关系;2.提问:在直角坐标系中,我们学过向量的旋转,那在极坐标系中是否也存在旋转变换?3.引入本节课的话题:我们今天要学习的是《极坐标系中的旋转变换》。
步骤二:学习与讲解(20分钟)1.讲解极坐标系中的旋转变换的概念与基本方法:–给出旋转变换的定义:极坐标系中,以原点为中心,逆时针旋转一个角度θ,得到的新坐标称为旋转变换;–引导学生进行基本的旋转变换操作,帮助理解旋转变换的方法和过程;–通过实例演示,让学生掌握极坐标系中的旋转变换的基本运算规则。
2.比较向量的旋转和极坐标系中的旋转变换:–将直角坐标系中的向量旋转和极坐标系中的旋转变换进行对比,帮助学生更好地理解两者之间的关系和差异。
旋转变换(一)旋转矩阵
旋转变换(一)旋转矩阵1. 简介计算机图形学中的应用非常广泛的变换是一种称为仿射变换的特殊变换,在仿射变换中的基本变换包括平移、旋转、缩放、剪切这几种。
本文以及接下来的几篇文章重点介绍一下关于旋转的变换,包括二维旋转变换、三维旋转变换以及它的一些表达方式(旋转矩阵、四元数、欧拉角等)。
2. 绕原点二维旋转首先要明确旋转在二维中是绕着某一个点进行旋转,三维中是绕着某一个轴进行旋转。
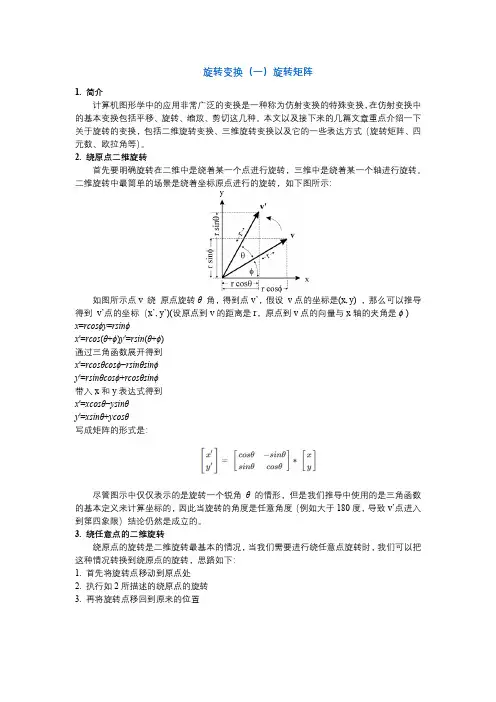
二维旋转中最简单的场景是绕着坐标原点进行的旋转,如下图所示:如图所示点v 绕原点旋转θ角,得到点v’,假设v点的坐标是(x, y) ,那么可以推导得到v’点的坐标(x’, y’)(设原点到v的距离是r,原点到v点的向量与x轴的夹角是ϕ )x=rcosϕy=rsinϕx′=rcos(θ+ϕ)y′=rsin(θ+ϕ)通过三角函数展开得到x′=rcosθcosϕ−rsinθsinϕy′=rsinθcosϕ+rcosθsinϕ带入x和y表达式得到x′=xcosθ−ysinθy′=xsinθ+ycosθ写成矩阵的形式是:尽管图示中仅仅表示的是旋转一个锐角θ的情形,但是我们推导中使用的是三角函数的基本定义来计算坐标的,因此当旋转的角度是任意角度(例如大于180度,导致v’点进入到第四象限)结论仍然是成立的。
3. 绕任意点的二维旋转绕原点的旋转是二维旋转最基本的情况,当我们需要进行绕任意点旋转时,我们可以把这种情况转换到绕原点的旋转,思路如下:1. 首先将旋转点移动到原点处2. 执行如2所描述的绕原点的旋转3. 再将旋转点移回到原来的位置也就是说在处理绕任意点旋转的情况下需要执行两次平移的操作。
假设平移的矩阵是T(x,y),也就是说我们需要得到的坐标v’=T(x,y)*R*T(-x,-y)(我们使用的是列坐标描述点的坐标,因此是左乘,首先执行T(-x,-y))在计算机图形学中,为了统一将平移、旋转、缩放等用矩阵表示,需要引入齐次坐标。
直角坐标系中的几何变换方法总结
直角坐标系中的几何变换方法总结直角坐标系是我们在数学和物理学中经常使用的一种坐标系统。
在直角坐标系中,我们可以通过坐标点的位置来描述一个点的位置。
然而,在实际问题中,我们经常需要对坐标系进行一些变换,以便更好地解决问题。
本文将总结一些常见的几何变换方法,帮助读者更好地理解和应用直角坐标系。
一、平移变换平移变换是指在直角坐标系中将一个图形沿着某个方向移动一定的距离。
平移变换不改变图形的形状和大小,只改变了它的位置。
在直角坐标系中,我们可以通过将图形中的每个点的坐标增加或减少相同的数值来实现平移变换。
例如,如果我们要将一个图形沿着x轴正方向平移3个单位,我们可以将每个点的x坐标加3。
二、旋转变换旋转变换是指在直角坐标系中将一个图形绕着某个点或某个轴旋转一定的角度。
旋转变换不改变图形的大小和形状,只改变了它的方向。
在直角坐标系中,我们可以通过将图形中的每个点绕着旋转中心进行旋转来实现旋转变换。
旋转的角度可以用弧度或度数来表示。
例如,如果我们要将一个图形绕着原点逆时针旋转90度,我们可以使用旋转矩阵来计算每个点的新坐标。
三、缩放变换缩放变换是指在直角坐标系中将一个图形沿着某个方向放大或缩小一定的比例。
缩放变换改变了图形的大小,但不改变它的形状和方向。
在直角坐标系中,我们可以通过将图形中的每个点的坐标乘以相同的比例因子来实现缩放变换。
例如,如果我们要将一个图形沿着x轴方向放大2倍,我们可以将每个点的x坐标乘以2。
四、对称变换对称变换是指在直角坐标系中将一个图形关于某个点、某个直线或某个平面进行对称。
对称变换不改变图形的大小和形状,只改变了它的位置。
在直角坐标系中,我们可以通过将图形中的每个点的坐标关于对称中心进行对称来实现对称变换。
例如,如果我们要将一个图形关于x轴进行对称,我们可以将每个点的y坐标取负值。
五、剪切变换剪切变换是指在直角坐标系中将一个图形沿着某个方向进行拉伸或压缩。
剪切变换改变了图形的形状,但不改变它的大小和方向。
旋转矩阵、欧拉角、四元数理论及其转换关系
旋转矩阵、欧拉⾓、四元数理论及其转换关系1. 概述旋转矩阵、欧拉⾓、四元数主要⽤于表⽰坐标系中的旋转关系,它们之间的转换关系可以减⼩⼀些算法的复杂度。
本⽂主要介绍了旋转矩阵、欧拉⾓、四元数的基本理论及其之间的转换关系。
2、原理2.1 旋转矩阵对于两个三维点p1(x1,y1,z1),p2(x2,y2,z2),由点 p1 经过旋转矩阵 R 旋转到 p2,则有注:旋转矩阵为正交矩阵RR^T=E任意旋转矩阵:任何⼀个旋转可以表⽰为依次绕着三个旋转轴旋三个⾓度的组合。
这三个⾓度称为欧拉⾓。
三个轴可以指固定的世界坐标系轴,也可以指被旋转的物体坐标系的轴。
三个旋转轴次序不同,会导致结果不同。
2.2 欧拉⾓欧拉⾓有两种:静态:即绕世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静⽌,所以称为静态。
动态:即绕物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态。
使⽤动态欧拉⾓会出现万向锁现象;静态欧拉⾓不存在万向锁的问题。
对于在三维空间⾥的⼀个参考系,任何坐标系的取向,都可以⽤三个欧拉⾓来表现。
参考系⼜称为实验室参考系,是静⽌不动的。
⽽坐标系则固定于刚体,随着刚体的旋转⽽旋转。
如图1,设定xyz-轴为参考系的参考轴。
称xy-平⾯与XY-平⾯的相交为交点线,⽤英⽂字母(N)代表。
zxz顺规的欧拉⾓可以静态地这样定义:α是x-轴与交点线的夹⾓,β是z-轴与Z-轴的夹⾓,γ是交点线与X-轴的夹⾓。
图中三个欧拉⾓分别为:(α,β,γ);蓝⾊的轴为:xyz轴红⾊的轴为:XYZ轴绿⾊的线为交线:Nα∈[0,2π],β∈[0,π],γ∈[0,2π]很可惜地,对于夹⾓的顺序和标记,夹⾓的两个轴的指定,并没有任何常规。
科学家对此从未达成共识。
每当⽤到欧拉⾓时,我们必须明确的表⽰出夹⾓的顺序,指定其参考轴。
实际上,有许多⽅法可以设定两个坐标系的相对取向。
欧拉⾓⽅法只是其中的⼀种。
此外,不同的作者会⽤不同组合的欧拉⾓来描述,或⽤不同的名字表⽰同样的欧拉⾓。
坐标系及其变换-完成
(2-23)
(2-20)式两端矩阵非对角线上对称元素相等,得
oz
ay
2
x
s
in
a x n z 2 y sin
ny
ox
2 z
s
in
(2-24)
由此解出等效旋转角 的正弦为
si n 1 2( o z a y ) 2 ( a x n z ) 2 ( n y o x ) 2 (2-25)
n
y
oy
ay
p
y
nz 0
oz 0
az 0
pz 1
nx ny nz p • n
则T的逆阵为 T 1 ox oy oz p •o (2-14)
a0x
ay 0
az 0
p•a
1
式中 p、n、o、a表示T的各列矢量;” ”•表示二矢量的数量积。
5.一般旋转变换
所谓一般旋转变换,即其旋转轴线不与参考系任何轴 线重合,而是参考系中某一矢量,这一矢量的方向用其上
o y cos
1 cos
(2-28)
z sgn( n y o x )
ax
cos
1 cos
式中 sgn—符号函数,当括弧内差值为正时取正号,
否则取负号。
3.相对变换
• 如上所述,一个齐次坐标可分解为平移及旋转 变换,根据这些平移和旋转是相对什么坐标系 去实现的,就导出了不同相对变换的概念,前 面只提及相对于参考系的变换,实际上还可相 对于变换过程中当前坐标系来实现变换。
(1)坐标系的相对变换
1) 相对于参考系的相对变换——始终相对于一 2) 个相同的参考系的变换
R( o ,)tYCR (z,)o Xt (2-18)
坐标系坐标系变换
xs VxL xw WxL VxR VxL WxR WxL ys VyB yw WyB VyT VyB WyT wyB
xs
VxR WxR
VxL WxL
(xw
WxL) VxL
5)其他变换
▪ 此外,还有数据库坐标到屏幕坐标的变换和屏幕坐标到数据库坐标 的变换。这两个变换是用来进行人机交互编辑并将编辑好的图形数 据送回数据库的。变换原理同上
空间数据的坐标变换
1)窗口区→视图区
▪ 用户可以在用户坐标系下指定任意的感兴趣的区域输出到设备上, 这个区域称为窗口区。窗口区是用户图形的一部分
相应的向量形式为:
x, y
x,
y
cos sin
sin
cos
空间数据的坐标变换
2)图形的几何变换
▪ 二维图形几何变换的齐次坐标表示
齐次坐标技术是从几何学中发展起来的,它实质上是用n+1维向 量来表示n维向量(合并矩阵乘法和加法) 。采用了齐次坐标技术 ,可把图形变换表示成图形的点集矩阵与某一变换矩阵进行矩阵 乘,从而借助计算机的高速计算得到变换后数据(采用统一的计 算形式实现平移、缩放和旋转)。
[
x
,
y
]
0
S
y
空间数据的坐标变换
2)图形的几何变换
▪ 二维图形几何变换的一般表示
旋转变换 x A cos( ) A (cos cos sin sin)
x cos y sin
y A sin( ) A(sin cos cos sin ) x sin y cos
0 0 1
几何形的旋转和切变变换
几何形的旋转和切变变换几何形的旋转和切变变换是数学中常见的几何操作,它们在许多领域中都有广泛的应用,包括计算机图形学、物理学、工程学等。
在本文中,我们将探讨旋转和切变的基本概念、公式以及其在实际应用中的意义。
旋转变换是将一个几何形体绕着某个中心点旋转一定角度的操作。
我们常用极坐标系来描述旋转变换,其中原点代表旋转中心,角度表示旋转的程度。
假设我们有一个点P(x,y),要将它绕着中心点O旋转θ角度后的新坐标为P'(x',y'),那么有以下公式:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ这些公式通过三角函数来描述坐标的变化。
通过改变θ的值,我们可以实现对几何形体的不同旋转效果。
切变变换是将一个几何形体沿着某个方向进行平移的操作。
它可以分为水平切变和垂直切变两种。
水平切变是将几何形体的每个点在水平方向上进行平移,而垂直切变则是在垂直方向上进行平移。
具体的切变公式如下:水平切变:x' = x + shx * yy' = y垂直切变:x' = xy' = y + shy * x其中shx和shy分别表示水平和垂直方向的切变系数。
通过改变切变系数的大小,我们可以实现对几何形体在平移方向上的不同变换效果。
旋转和切变变换在计算机图形学中有着广泛的应用。
比如,在计算机游戏中,我们经常需要对角色的模型进行旋转和切变,以实现动画效果。
同时,在CAD软件中,旋转和切变变换也被用于设计和编辑图形对象,使其具有更好的可视化效果。
除了计算机图形学,旋转和切变变换还在物理学和工程学等领域中发挥着重要作用。
在物理学中,我们可以通过旋转和切变变换来描述刚体在空间中的运动轨迹,从而研究其力学行为。
在工程学中,旋转和切变变换可以应用于材料力学、流体力学等领域,来研究材料的变形和流体的运动。
综上所述,几何形的旋转和切变变换在数学中具有重要的地位和广泛的应用。
[算法]计算中表示旋转的几种方法
[算法]计算中表⽰旋转的⼏种⽅法如何表⽰旋转,可能的表⽰⽅法有:(1)轴-⾓(axis-angle)表⽰法。
⽅便转换,⼏何意义明显(2)欧拉⾓表⽰法(3)旋转矩阵(rotation matirces)法(4)四元数法第⼀种所谓轴-⾓表⽰法,是说任何的旋转情况都归类为下⾯这种情况,即⼀个旋转将向量x旋转为x′,⼀定是绕⼀个旋转轴ˆn‘旋转了θ度,因此,任何⼀个旋转都可以表⽰为⼀个旋转轴(x,y,z)和⼀个⾓度θ这⾥有通过Rodrigues formula:⼀种常见的写法改写成:IIRC,这⾥应该是⽤了叉乘矩阵和单位矩阵的⼀个减法做的变换。
第三种是旋转矩阵法,从代数的⾓度理解旋转矩阵,那就是空间之间的变换,同时,结合上⾯两种表⽰法,也可以有另外的理解。
⾸先是空间之间的变换。
想象我们有两个三维线性空间的直⾓坐标系,⼀个^u1,^u2,^u3,⼀个\hat{u_1}^',\hat{{u_1}^'},\hat{{u_1}^'},其中\hat{{u}^'}是ˆu经过某种旋转变换得到的像,那么由线性代数的知识,在^u1,^u2,^u3坐标系下表⽰\hat{{u_1}^'},\hat{{u_1}^'},\hat{{u_1}^'}的坐标将坐标写成矩阵,实际上就描述了这⼀旋转的矩阵:其次是所谓轴-⾓表⽰法。
轴-⾓表⽰的旋转可以写成rot(ˆn,θ),的形式,将叉乘矩阵带⼊上⾯的Rodrigues Formula,即可得到对应的矩阵形式。
⾄于欧拉⾓法,其实就是三个矩阵相乘。
Processing math: 100%。
直角坐标系中点的旋转研究
直角坐标系中点的旋转研究一、问题提出旋转作为中学几何变换的重要变换之一,在数学的应用中随处可见,在很多几何辅助线的作法上都运用到旋转变换的思想。
特别在求解和证明有关等腰直角三角形、正三角形、正方形和探究角、线段、面积等问题时更是用到旋转的思想方法。
本文结合中考20题型,以直角坐标系为载体,将旋转变换应用到点的旋转中,求解点在旋转不同角度后的坐标求解。
二、问题研究1.旋转180度传统的旋转变换角度主要考察的180度和90度,本文先由中心对称图形出发,即从旋转180度开始。
已知:),(y x P 关于原点对称的点为P ′(-x,-y )什么是P 点关于原点的对称点,课本是这样叙述的:连接PO ,并延长,以O 点为圆心,以PO 为半径画图交PO 延长线于P ′点,则P ′与P 关于O 中心对称中心对称的概念是某图形绕着某点顺时针或逆时针旋转180度,与另一个图形重合,则两个图形关于那个点中心对称。
其实从作题思路来看,可以通过全等的方法来证明作轴X PA ⊥, 轴X B P ⊥′, 则OB P Δ≌Δ′POA (AAS 或ASA).因此,通过全等解题的思想,可以把问题多样化分类讨论,运用相同的方法解决不同的问题。
例如:求P (4,3)关于(1,0)中心对称的点的坐标由AC P PAB ′ΔΔ≌可得AC=AB=3,3==′PB C PP ′∴(-2,-3)所以,点旋转180度后的求解,主要利用了全等的解题方法。
其实,可以发现A P PA ′=,即A 为P P ′的中点,观察P (4,3),A (1,0),P ′(-2,-3)的横纵坐标之间的关系 可以发现:02)3-(3,12)2-(4=+=+由中心对称引入中点公式 我们是否可以猜想 A(1,1y x ), B(2,2y x ) 的中点坐标为C (2,22121y y x x ++)如右图所示:过A 作平行于x 轴的直线与过B 作平行y 轴的直线相交于M 点, 过C 作BM CL AM CN ⊥⊥,由中位线性质AM CL BM CN 21,21== 1212-,-∴y y BM x x AM ==2)-(212121∴211211x x x x x AM x AM x x A C +=+=+=+= 2)-(212121∴211211y y y y y BM y BM y y A C +=+=+=+= )2,2(2121y y x x C ++∴那么反过来,已知A (x,y )关于P (m,n )中心对称的点为B ,那么B 点的坐标为______解:设B (00,y x )由中点公式m x x =+20,x m x -2∴0= n y y =+20,y n y -2∴0=当旋转角度由180度到90度的时候,解决问题的方法还是和以前一样么?例如:若P (-3,2)绕原点O (0,0)顺时针旋转90度,得P ′,求P ′坐标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. (2016 广西河池市) 】.如图,在平面直角坐标系中,O 为坐标原点,点A 的坐标为(1,3).将线段OA 绕原点O 逆时针旋转30°,得到线段OB ,则点B 的坐标是( )A .(0,2)B .(2,0)C .(1,―3)D .(―1,3)答案:】.答案A逐步提示作AC ⊥x 轴于点C ,根据勾股定理求出OA 的长,根据正切的概念求出∠AOC 的度数,再根据旋转变换即可得解.详细解答解:过点A 作AC ⊥x 轴于点C .∵点A 的坐标为(1,3),∴OC =1,AC =3.∴OA =12+ (3)2=2.∵tan ∠AOC =AC OC=3,∴∠AOC =60°.∴将线段OA 绕原点O 逆时针旋转30°得到线段OB 时,点B 恰好在y 轴上.∴点B 的坐标是(0,2) .故选择A.解后反思本题通过作垂线,将点的坐标转化为线段的长度,应用勾股定理求斜边的长,应用特殊角的三角函数值求出特殊角的度数,再根据旋转的方向和角度确定所求点的位置,最后写出其坐标.关键词 图形旋转的特征、特殊角三角函数值的运用、点的坐标20160926210454015732 4 坐标系中的旋转变换 选择题 基础知识 2016/9/262. (2016 广西贺州市) 】.如图,将线段AB 绕点O 顺时针旋转90°得到线段A ′B ′,那么A (﹣2,5)的对应点A ′的坐标是( )A.(2,5) B.(5,2) C.(2,﹣5) D.(5,﹣2)答案:】.考点坐标与图形变化-旋转.分析由线段AB绕点O顺时针旋转90°得到线段A′B′可以得出△ABO≌△A′B′O′,∠AOA′=90°,作AC⊥y轴于C,A′C′⊥x轴于C′,就可以得出△ACO≌△A′C′O,就可以得出AC=A′C′,CO=C′O,由A的坐标就可以求出结论.解答解:∵线段AB绕点O顺时针旋转90°得到线段A′B′,∴△ABO≌△A′B′O′,∠AOA′=90°,∴AO=A′O.作AC⊥y轴于C,A′C′⊥x轴于C′,∴∠ACO=∠A′C′O=90°.∵∠COC′=90°,∴∠AOA′﹣∠COA′=∠COC′﹣∠COA′,∴∠AOC=∠A′OC′.在△ACO和△A′C′O中,,∴△ACO≌△A′C′O(AAS),∴AC=A′C′,CO=C′O.∵A(﹣2,5),∴AC=2,CO=5,∴A′C′=2,OC′=5,∴A′(5,2).故选:B.点评本题考查了旋转的性质的运用,全等三角形的判定及性质的运用,等式的性质的运用,点的坐标的运用,解答时证明三角形全等是关键。
20160926195312687961 4 坐标系中的旋转变换选择题基础知识2016/9/263. (2016 广东省茂名市) 】.如图,在平面直角坐标系中,将△ABO绕点B顺时针旋转到△A1BO1的位置,使点A的对应点A1落在直线y=x上,再将△A1BO1绕点A1顺时针旋转到△A1B1O2的位置,使点O1的对应点O2落在直线y=x上,依次进行下去…,若点A的坐标是(0,1),点B的坐标是(,1),则点A8的横坐标是.答案:】.考点坐标与图形变化-旋转;一次函数图象与几何变换.分析先求出点A2,A4,A6…的横坐标,探究规律即可解决问题.解答解:由题意点A2的横坐标(+1),点A4的横坐标3(+1),点A6的横坐标(+1),点A8的横坐标6(+1).故答案为6+6.点评本题考查坐标与图形的变换﹣旋转,一次函数图形与几何变换等知识,解题的关键是学会从特殊到一般,探究规律,由规律解决问题,属于中考常考题型.三、20160926163457343134 4 坐标系中的旋转变换 填空题 双基简单应用 2016/9/264. (2016 山东省临沂市) 】.如图,将等边△ABC 绕点C 顺时针旋转120°得到△EDC ,连接AD 、BD ,则下列结论:①AC=AD ;②BD ⊥AC ;③四边形ACED 是菱形.其中正确的个数是(A) 0 .(B) 1 . (C) 2 .(D) 3 .答案:】.D20160926132328296162 4 坐标系中的旋转变换 选择题 基础知识 2016/9/265. (2016 辽宁省丹东市) 】.】.在平面直角坐标系中,△ABC 的位置如图所示(每个小方格都是边长为1个单位长度的正方形).(1)将△ABC 沿x 轴方向向左平移6个单位,画出平移后得到的△A 1B 1C 1;(2)将△ABC 绕着点A 顺时针旋转90°,画出旋转后得到的△AB 2C 2,并直接写出点B 2、C 2的坐标.ED C B A答案:】.】.考点作图-旋转变换;作图-平移变换.分析(1)利用点平移的规律写出点A、B、C的对应点A1、B1、C1的坐标,然后描点即可得到△A1B1C1;(2)利用网格特点和旋转的性质画出点B、C的对应点B2、C2,从而得到△AB2C2,再写出点B2、C2的坐标.解答解:(1)如图,△A1B1C1即为所求;(2)如图,△AB2C2即为所求,点B2(4,﹣2),C2(1,﹣3).20160926113336812114 4 坐标系中的旋转变换应用题基础知识2016/9/266. (2016 山东省聊城市) 】.如图,在平面直角坐标系中,已知△ABC的三个顶点的坐标分别为A(﹣3,5),B(﹣2,1),C(﹣1,3).(1)若△ABC经过平移后得到△A1B1C1,已知点C1的坐标为(4,0),写出顶点A1,B1的坐标;(2)若△ABC和△A1B2C2关于原点O成中心对称图形,写出△A1B2C2的各顶点的坐标;(3)将△ABC绕着点O按顺时针方向旋转90°得到△A2B3C3,写出△A2B3C3的各顶点的坐标.答案:】.答案(1)、图形见解析;A1的坐标为(2,2),B1点的坐标为(3,﹣2);(2)、图形见解析;A2(3,﹣5),B2(2,﹣1),C2(1,﹣3);(3)、图形见解析;A3(5,3),B3(1,2),C3(3,1).解析试题分析:(1)、利用点C和点C1的坐标变化得到平移的方向与距离,然后利用此平移规律写出顶点A1,B1的坐标;(2)、根据关于原点对称的点的坐标特征求解;(3)、利用网格和旋转的性质画出△A2B3C3,然后写出△A2B3C3的各顶点的坐标.试题解析:(1)、如图,△A1B1C1为所作,因为点C(﹣1,3)平移后的对应点C1的坐标为(4,0),考点:(1)、坐标与图形变化-旋转;(2)、坐标与图形变化-平移20160926105557507087 4 坐标系中的旋转变换应用题基础知识2016/9/267. (2016 山东省济南市) 】.京剧脸谱、剪纸等图案蕴含着简洁美、对称美,下列选取的图片中既是轴对称图形又是中心对称图形的是()答案:】.答案D解析A、B是轴对称图形但不是中心对称图形,C是中心对称图形但不是轴对称图形,所以A、B、C选项都不正确;D既是轴对称图形又是中心对称图形,所以D选项正确;故答案选D.20160926103459773498 4 坐标系中的旋转变换选择题基础知识2016/9/268. (2016 青海省西宁市) 如图,Rt△AOB中,∠AOB=90°,OA在x轴上,OB在y轴上,点A,B 的坐标分别为(,0),(0,1),把Rt△AOB沿着AB对折得到Rt△AO′B,则点O′的坐标为.答案:考点翻折变换(折叠问题);坐标与图形性质.分析作O′C⊥y轴于点C,首先根据点A,B的坐标分别为(,0),(0,1)得到∠BAO=30°,从而得出∠OBA=60°,然后根据Rt△AOB沿着AB对折得到Rt△AO′B,得到∠CBO′=60°,最后设BC=x,则OC′=x,利用勾股定理求得x的值即可求解.解答解:如图,作O′C⊥y轴于点C,∵点A,B的坐标分别为(,0),(0,1),∴OB=1,OA=,∴tan∠BAO==,∴∠BAO=30°,∴∠OBA=60°,∵Rt△AOB沿着AB对折得到Rt△AO′B,∴∠CBO′=60°,∴设BC=x,则OC′=x,∴x2+(x)2=1,解得:x=(负值舍去),∴OC=OB+BC=1+=,∴点O′的坐标为(,).故答案为:(,).点评本题考查了翻折变换及坐标与图形的性质的知识,解题的关键是根据点A和点B的坐标确定三角形为特殊三角形,难度不大.20160925152128437802 4 坐标系中的旋转变换填空题基础知识2016/9/259. (2016 内蒙古呼伦贝尔市) 】.如图,在Rt△ABC中,∠C=90°,AC=3,BC=4,把△ABC绕AB边上的点D顺时针旋转90°得到△A′B′C′,A′C′交AB于点E,若AD=BE,则△A′DE的面积是.答案:】.考点旋转的性质.分析在Rt△ABC中,由勾股定理求得AB=5,由旋转的性质可知AD=A′D,设AD=A′D=BE=x,则DE=5﹣2x,根据旋转90°可证△A′DE∽△ACB,利用相似比求x,再求△A′DE的面积.解答解:Rt△ABC中,由勾股定理求AB==5,由旋转的性质,设AD=A′D=BE=x,则DE=5﹣2x,∵△ABC绕AB边上的点D顺时针旋转90°得到△A′B′C′,∴∠A′=∠A,∠A′DE=∠C=90°,∴△A′DE∽△ACB,∴=,即=,解得x=,∴S△A′DE=DE×A′D=×(5﹣2×)×=,故答案为:.点评本题考查了相似三角形的判定与性质,勾股定理及旋转的性质.关键是根据旋转的性质得出相似三角形,利用相似比求解.20160925142202328972 4 坐标系中的旋转变换填空题基础知识2016/9/2510. (2016 内蒙古呼伦贝尔市) 】.如图,Rt△ABC中,AB=9,BC=6,∠B=90°,将△ABC折叠,使A点与BC的中点D重合,折痕为PQ,则线段BQ的长度为()A.B.C.4 D.5答案:】.考点翻折变换(折叠问题).分析设BQ=x,则由折叠的性质可得DQ=AQ=9﹣x,根据中点的定义可得BD=3,在Rt△BQD中,根据勾股定理可得关于x的方程,解方程即可求解.解答解:设BQ=x,由折叠的性质可得DQ=AQ=9﹣x,∵D是BC的中点,∴BD=3,在Rt△BQD中,x2+32=(9﹣x)2,解得:x=4.故线段BQ的长为4.故选:C.点评此题考查了翻折变换(折叠问题),折叠的性质,勾股定理,中点的定义以及方程思想,综合性较强.20160925142202125534 4 坐标系中的旋转变换 选择题 基础知识 2016/9/2511. (2016 江苏省宿迁市) 】.已知△ABC 是等腰直角三角形,AC =BC =2,D 是边AB 上一动点(A 、B 两点除外),将△CAD 绕点C 按逆时针方向旋转角α得到△CEF ,其中点E 是点A 的对应点,点F 是点D 的对应点.(1)如图1,当α=90°时,G 是边AB 上一点,且BG =AD ,连接GF .求证:GF ∥AC ;(2)如图2,当90°≤α≤180°时,AE 与DF 相交于点M .①当点M 与点C 、D 不重合时,连接CM ,求∠CMD 的度数;②设D 为边AB 的中点,当α从90°变化到180°时,求点M 运动的路径长.答案:】.答案(1)证明见解析;(2)①135°;②2. 解析试题分析:(1)欲证明GF ∥AC ,只要证明∠A =∠FGB 即可解决问题.(2)①先证明A 、D 、M 、C 四点共圆,得到∠CMF =∠CAD =45°,即可解决问题.∵2∠CAE +∠ACE =180°,2∠CDF +∠DCF =180°,∴∠CAE =∠CDF ,∴A 、D 、M 、C 四点共圆,∴∠CMF =∠CAD =45°,∴∠CMD =180°﹣∠CMF =135°.②如图3中,O 是AC 中点,连接OD 、CM .∵AD =DB ,CA =CB ,∴CD ⊥AB ,∴∠ADC =90°,由①可知A 、D 、M 、C 四点共圆,∴当α从90°变化到180°时,点M 在以AC 为直径的⊙O 上,运动路径是弧CD ,∵OA =OC ,CD =DA ,∴DO ⊥AC ,∴∠DOC =90°,∴CD 的长=901180π⨯=2π,∴当α从90°变化到180°时,点M 运动的路径长为2π.考点:几何变换综合题.20160925111800203601 4 坐标系中的旋转变换应用题基础知识2016/9/25。