PCI-1240运动控制卡 快速入门手册解析
运动控制卡说明书

第一章概述1.1 PCI_SERVO4四轴运控卡的软硬件简介PCI_SERVO4四轴运控卡是基于PC机PCI总线的步进电机或数字式伺服电机的上位控制单元,它与PC机构成主从式控制结构:PC机负责人机交互界面的管理和控制系统的实时监控等方面的工作(例如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监控等等);该卡完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。
每块该卡可控制4轴步进电机或数字式伺服电机,并支持多卡共用,以实现多于四个运动轴的控制;每轴均可输出脉冲和方向信号,以控制电机的运转;同时,可外接原点、减速、限位等开关信号,以实现回原点、保护等功能,这些开关信号由该卡自动检测并作出反应。
另外,该卡还提供了适用于伺服系统的伺服使能和偏差清零信号接口,以及供用户使用的通用I/O接口。
该卡采用先进的专用控制芯片,具有梯形及S形升降速曲线,最高输出频率可达4MHz,带有编码器反馈端口,主要适用于数字式交流伺服系统或闭环的步进电机控制系统。
该卡配备了功能强大、内容丰富的运动控制驱动软件工具。
该卡在插补算法和运动函数的执行效率方面采用了更有效的方法,提高了插补精度、插补速度和实时性。
这些软件工具主要分为示范软件和运动函数库两大类。
利用PCI_SERVO4的示范软件既可以很快地熟悉该卡的软、硬件功能,又可以方便快捷地测试执行电机及驱动系统在完成各种运动时的性能特性。
该卡运动函数库用于二次开发,用户只要用VC++或Visual Basic等支持DLL调用的开发工具编制所需的用户界面程序,并把它与该卡运动库链接起来,就可以开发出自己的控制系统,例如:数控系统、检测设备、自动生产线等。
该卡的运动函数库能够完成与运动控制有关的复杂细节(比如:升降速、直线插补、圆弧插补等),这样就可以大大缩短控制系统的开发周期。
1.2PCI_SERVO4的结构PCI_SERVO4控制卡作为开发运动控制系统的平台,其结构是开放式的。
S1240基础知识介绍

S1240培训教材一湖南省电信有限公司技术维护局目录第一讲A1000 S12系统介绍 (3)第二讲操作与维护 (19)第三讲用户管理 (34)第四讲中继及字冠管理 (51)第五讲计费管理 (70)第六讲NO.7信令系统管理 (97)第一讲A1000 S12系统介绍一、A1000 S12交换机的特点及结构1、System 1240的历史与未来关于A1000 S12(又称为System 12或S1240)的基本研究起始于70年代中期。
如图1.1所示,当时的开发主要有2个目标,一是在一个ISDN环境中设计用于话音和数据的系统;另一方面是采用新的半导体技术(LSI,VLSI)提供充分的运算能力和大量存储器。
这项研究导致S12结构的产生。
在70年代末,S12的项目转到位于比利时的Bell公司,德国的SEL公司,意大利的FACE公司和西班牙的SESA公司的实验室和开发中心。
80年代初,由于LSI和VLSI的发展,推动了专用的数字交换网络芯片的技术和公用电话网技术。
1981年底,比利时公司成功的制造出第一个S12交换机,并投入使用。
不久以后,德国安装了4个系统(两个市话局和两个长话局)。
系统12那时称作ALic(Analogue Line Interface Circuit,模拟用户线接口电路),又称为A系列S12交换机。
1985年,S12技术第一次被更新,新的名字是ELC(Evolutionary Line Circuit ,改进型用户线电路),又称E系列S12交换机。
1988年初,在德国开通了第一个有ISDN功能的S12 ELC型交换机。
到1989年底共有25个带有ISDN功能的交换机在6个国家运行,到1990年又增加到3500多个系统在20个国家的电话公司安装。
1991年6月,Alcatel开始生产Alcatel 1000系列,目标是向B-ISDN转换,92年,成功地研制了NGL(New Generation Line,新生成用户线),又可称为J系列S12。
PCI1234使用手册
PCI-1234光隔离64通道输入输出卡使用说明书V1.112010-1概述 (3)管脚定义 (4)开关选择 (6)寄存器 (7)输入输出说明 (9)编程指南 (10)程序demo (12)概述P CI-1234是一款基于PCI协议的光隔离64通道输入输出控制卡,用户可设置板ID号,兼容5V/3.3V PCI协议。
特点:z32路光隔离输入通道(无极性),32路光隔离输出z具有较高的输出驱动能力z可配置板ID号z兼容标准产品z兼容5V和3.3V 2.2版本PCI协议z光隔离输入通道输入电阻 4.7KΩ@1/4Wz光隔离输入逻辑高:3V~24V ,逻辑低为:0~2.4Vz隔离输出通道采用达林顿管集电极开路输出,集电极开路电压5V~35V(DC) 200mA反向电流输出z隔离电压 3750Vrms管脚定义PCI1234 100-pin SCSI-II 接口如下(1)IDI0 (26)IDO0 (51) IDI8 (76)IDO8(2)IDI1 (27) IDO1 (52) IDI9 (77) IDO9(3)IDI2 (28) IDO2 (53) IDI10 (78) IDO10(4)IDI3 (29) IDO3 (54) IDI11 (79) IDO11(5)IDI4 (30) IDO4 (55) IDI12 (80) IDO12(6)IDI5 (31) IDO5 (56) IDI13 (81) IDO13(7)IDI6 (32) IDO6 (57) IDI14 (82) IDO14(8)IDI7 (33) IDO7 (58)IDI15 (83) IDO15(9)COM1 (34)VDD1 (59)COM2 (84)VDD2(10)COM1 (35)IGND (60) COM2 (85)IGDN(11)COM1 (36)IGND (61) COM2 (86)IGND(12)COM1 (37)IGND (62) COM2 (87)IGND(13)IDI16 (38)IDO16 (63)IDI24 (88)IDO24(14)IDI17 (39)IDO17 (64)IDI25 (89)IDO25(15)IDI18 (40)IDO18 (65)IDI26 (90) IDO26(16)IDI19 (41)IDO19 (66)IDI27 (91) IDO27(17)IDI20 (42)IDO20 (67)IDI28 (92) IDO28(18)IDI21 (43)IDO21 (68)IDI29 (93) IDO29(19)IDI22 (44)IDO22 (69)IDI30 (94) IDO30(20)IDI23 (45)IDO23 (70)IDI31 (95) IDO31(21)COM3 (46)VDD3 (71)CMO4 (96)VDD4(22)COM3 (47)IGND (72) CMO4 (97)IGND(23)COM3 (48)IGND (73) CMO4 (98)IGND(24)COM3 (49)IGND (74) CMO4 (99)IGND(25)NC (50)V5V (75) NC (100)V5V接图1 PCI1234 CN1链图其中:IDIn: 光隔离输入通道n(n= 0~31)IDOn: 光隔离输出通道n(n= 0~31)VDDm: 保护电源端IGND: 光隔离输出通道地COMm:光隔离输入公共端。
笔记本电脑MiniPCI总线测速功能说明
笔记本电脑MiniPCI总线测速功能说明在一块新的笔记本电脑上,使用其功能,可以方便的测试笔记本电脑的MiniPCI总线速度,即测即知;使用其功能,可以在购买笔记本电脑时,起到参考作用;也可使用其功能,将总线速度快的笔记本电脑卖出好价钱。
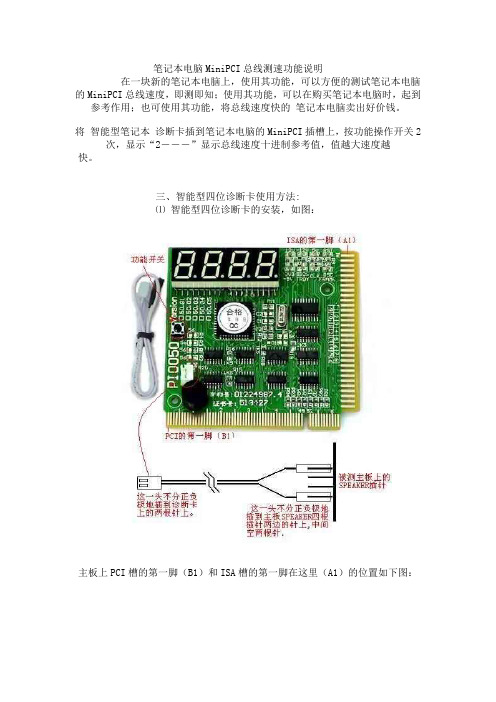
将智能型笔记本诊断卡插到笔记本电脑的MiniPCI插槽上,按功能操作开关2次,显示“2---”显示总线速度十进制参考值,值越大速度越快。
三、智能型四位诊断卡使用方法:⑪ 智能型四位诊断卡的安装,如图:主板上PCI槽的第一脚(B1)和ISA槽的第一脚在这里(A1)的位置如下图:⑫ 智能型诊断卡PI0050A使用方法流程图:⑬ 智能型诊断卡PI0050A数码管显示定义:智能型诊断卡 PI0050A 显示四位代码,前两位(即千位和百位)为被测计算机的检测故障代码;后两位(十位和个位)根据不同的操作,显示的代码意义不同。
当故障检测时,十位和个位显示的是千百位上故障代码的前一码;当使用代码翻查功能时,十位和个位显示的是千百位上故障代码的个数记数(PI0050卡总共能记忆48个代码,记数的序数号为00至47)。
故障检测时: 千百十个代码翻查时:千百十个位位位位位位位位故障代码前一码故障代码代码个数记数⑭ 智能型诊断卡PI0050A功能开关操作说明流程图:零速网络 » 个人电脑 » 电脑诊断卡使用方法‹‹ 上一主题 |下一主题 ››打印[其他]电脑诊断卡使用方法版主1# 大 中 小 发表于 2007-5-21 18:57 只看该作者 官方强烈推荐使用web 迅雷进行高速下载! 最新影视资源电脑诊断卡使用方法断卡使用方法 一、用户必读; 二、智能型笔记本电脑诊断卡使用方法;三、智能型四位诊断卡使用方法;四、智能型并口诊断卡L50使用方法.一、用户必读:⑪. 诊断卡也叫PC Analyzer 或POST ( Power On Self Test )卡,其工作原理是利用主板中 BIOS 内部自检程序的检测结果,通过代码一一 显示出来,结合本书的代码含义速查表就能很快地知道电脑故障所在。
基于PCI_1240控制卡G代码编译器的设计与研究
2009年3月第37卷第3期机床与液压MACH I NE TOOL &HYDRAULI CSM ar 12009V ol 137N o 13收稿日期:2008-03-24作者简介:赵振江(1969)),男,硕士,研究生,讲师,研究方向为计算机应用。
E-m ai:l z haozz@j 1631com 。
基于PCI -1240控制卡G 代码编译器的设计与研究赵振江(沈阳化工学院计算机科学与技术学院,辽宁沈阳110142)摘要:根据数控代码特点,用BOOST 正则表达式设计了一种G 代码编译器。
该编译器匹配速度快、精度高、具有较强的通用性和兼容性。
根据编译器的解释结果,利用PC I -1240伺服运动控制卡进行直线、插补等复杂运动,满足工业现场各种伺服驱动的需要。
该软件编译器具有控制简单、可靠和编程容易等特点。
关键词:PCI -1240伺服运动控制卡;G-CODE 编译器;正则表达式;数控系统中图分类号:T P39 文献标识码:A 文章编号:1001-3881(2009)3-116-3D esign and Research of G Code Co m piler Based on t he PCI -1240Control CardZ HAO Zhenjiang(Depart m ent o f Co m puter Science and Techno logy ,Shenyang Institute of Che m icalT echnology ,Shenyang L iaon i n g 110142,Chi n a)Abstrac t :A ccord i ng to t he cha racte ristics o fN C code ,a k i nd of G code co m piler was designed using Boo st .R egex.the co m-p iler has h i gh m atch speed and accuracy,and a strong versatility and co m pa tibility .A ccord i ng to the explaina ti on of t he comp iler ,usi ng t he PC I -1240servo mo ti on contro l card to m ake li near ,i nterpo l a ti on and o t her comp l ex m otion ,It can m ee t t he needs o f a var i e -ty of servo dr i ve i n i ndustria l scene .The comp iler has t he features o f si m ple and re liab l e contro l and easy prog ramm i ng.K eyword s :PCI -1240servo m oti on con tro l card ;G-CODE com piler ;R egu l ar expressi on ;N u m er ica l contro l syste m0 前言随着计算机结构透明性的增强,硬件的开放性、统一的操作平台、资源的丰富性,数控技术向着通用计算机即开放式结构方向发展,并成为最具生命力的技术平台。
台达运动控制卡系统快速应用手册_2013.12.31
台达运动控制卡系统快速应用手册Ver: 13.1231.1Delta Electronics, Inc.IABG Solution Center2013.12.31(此页为空)说明本手册讲解台达A01/B01/F01运动控制卡系统的架构、性能、软件函数接口等, 旨在为用户提供快速便捷的应用指引。
本手册参考以下文档:{1}A01/B01卡片手册PCI-DMC-01_UserGuide_Traditional.pdf{2}F01卡片手册PCI-DMC-F01_UserGuide_Traditional.pdf{3}远程模组手册ASD-DMC-RM_UserGuide_Traditional.pdf{4}集合扩展模组手册ASD-DMC-GAGE_UserGuide_Traditional.pdf{5}软件开发手册PCI-DMC_ProgrammingGuide_Traditional.pdf{6}伺服手册DELTA_ASDA-A2_M_TC_********.pdf(此页为空)目录{1}系统概述............................................................................................................................................................. - 1 - {1.1}特色功能.................................................................................................................................................. - 2 - {1.2}最大配置.................................................................................................................................................. - 3 - {1.3}通讯总线.................................................................................................................................................. - 3 - {1.4}产品清单.................................................................................................................................................. - 4 - {1.5}软件开发.................................................................................................................................................. - 4 - {1.5.1}支持的电脑操作系统版本........................................................................................................... - 4 - {1.5.2}支持的软件高级语言开发环境................................................................................................... - 4 - {1.5.3}软件开发包介绍........................................................................................................................... - 5 - {1.5.4}查看Dll文件版本......................................................................................................................... - 5 - {1.5.5}新建工程示例............................................................................................................................... - 9 - {2}卡片................................................................................................................................................................... - 33 - {2.1}卡片A01/B01/F01简介及区别 ............................................................................................................ - 33 - {2.1.1}A01 .............................................................................................................................................. - 33 - {2.1.2}B01 .............................................................................................................................................. - 34 - {2.1.3}F01 ............................................................................................................................................... - 35 - {2.1.4}A01/B01/F01区别表 .................................................................................................................. - 35 - {2.2}A01/B01卡号设定及卡号从站号设定规则......................................................................................... - 36 - {2.3}F01卡号设定及卡号从站号设定规则 ................................................................................................. - 36 - {2.4}查看卡片版本(EzDMC软件) ................................................................................................................. - 37 - {3}伺服................................................................................................................................................................... - 39 - {3.1}伺服ASD-A2-####-F系列 ..................................................................................................................... - 39 - {3.1.1}站号设定..................................................................................................................................... - 39 - {3.1.2}读取伺服驱动器参数................................................................................................................. - 41 - {3.1.3}写入伺服驱动器参数................................................................................................................. - 41 - {3.1.4}系统初始化过程会重置部分参数............................................................................................. - 41 - {3.1.5}使能禁能..................................................................................................................................... - 42 - {3.1.6}回原点......................................................................................................................................... - 43 - {3.1.7}绝对值型马达............................................................................................................................. - 62 - {3.2}伺服ASD-M-####-F系列 ...................................................................................................................... - 65 - {4}远程数字量输入模组....................................................................................................................................... - 65 - {4.1}32点输入ASD-DMC-RM32MN ............................................................................................................. - 65 - {4.1.1}站号设定及端口号说明............................................................................................................. - 65 - {4.2}64点输入ASD-DMC-RM64MN ............................................................................................................. - 66 - {4.2.1}站号设定及端口号说明............................................................................................................. - 66 - {5}远程数字量输出模组....................................................................................................................................... - 67 - {5.1}32点输出ASD-DMC-RM32NT............................................................................................................... - 67 - {5.1.1}站号设定及端口号说明............................................................................................................. - 67 - {5.2}64点输出ASD-DMC-RM64NT............................................................................................................... - 68 - {5.2.1}站号设定及端口号说明............................................................................................................. - 68 - {6}远程数字量16点入16点出混合模组ASD-DMC-RM32PT ........................................................................... - 69 - {6.2.1}站号设定及端口号说明............................................................................................................. - 69 -{7}远程模拟量4通道输入模组ASD-DMC-RM04AD........................................................................................... - 70 - {7.1}站号设定及通道号说明........................................................................................................................ - 70 - {8}远程模拟量4通道输出模组ASD-DMC-RM04DA........................................................................................... - 71 - {8.1}站号设定及通道号说明........................................................................................................................ - 71 - {9}远程脉冲量4路输出模组ASD-DMC-RM04PI ................................................................................................ - 71 - {9.1}模式设定及站号设定............................................................................................................................ - 71 - {9.1.1}模式1 .......................................................................................................................................... - 72 - {9.1.2}模式2 .......................................................................................................................................... - 73 - {9.2}“模式1”与“模式2”区别.............................................................................................................. - 74 - {9.3}模式1 ..................................................................................................................................................... - 74 - {9.3.1}获取DI/DO状态(_DMC_01_get_monitor) ................................................................................ - 74 - {9.4}模式2 ..................................................................................................................................................... - 75 - {9.4.1}获取DI/DO状态(_DMC_01_get_monitor) ................................................................................ - 75 - {9.4.2}获取DI状态(_DMC_01_get_servo_DI)...................................................................................... - 76 - {9.4.3}获取DO状态(_DMC_01_get_servo_DO) .................................................................................. - 76 - {10}集合扩展模组................................................................................................................................................. - 76 - {10.1}集合站号模组ASD-DMC-GA01 ........................................................................................................... - 76 - {10.1.1}GA01/GE搭配及GA01站号设定 ............................................................................................ - 77 - {10.1.2}GA01站号设定助手................................................................................................................. - 78 - {10.2}扩展数字量16点输入模组ASD-DMC-GE16MN ............................................................................... - 81 - {10.3}扩展数字量16点输出模组ASD-DMC-GE16NT ................................................................................. - 81 - {10.4}扩展脉冲量1路输出模组ASD-DMC-GE01PH ................................................................................... - 81 -{1}系统概述“台达运动控制卡系统”是台达电子新近推出的基于工控电脑的运动控制整体解决方案。
PCI-1240快速入门手册
PCI-1240快速入门手册目录第一章 PCI-1240安装1.1PCI-1240 Driver与Utility安装1.2PCI-1240硬件安装第二章 PCI-1240与驱动器接线2.1 PCI-1240 针脚描述2.2 PCI-1240 与驱动器连接第三章 PCI-1240 测试3.1 PCI-1240 Utility 使用第四章 PCI-1240 软件编程4.1 PCI-1240 软件编程第五章 附录1.PCI-1240 Utility界面说明:第一章 PCI-1240安装1.1PCI-1240 Driver 与Utility 安装在使用pci-1240之前必须安装pci-1240驱动,驱动安装步骤:A)将研华提供的驱动光盘置于光驱中,出现如下画面:B)点击Installation选项,出现如下画面:C)点击Individual Driver,出现如下画面:D)选择Motion Control Cards 中选项 PCI-1240,点击安装PCI-1240驱动;1.2 PCI-1240硬件安装:1)PCI-1240跳线设置:I.BoardID 设置:通过设置板卡上DIP开关可以设置PCI-1240的BoardID从0-15。
II.JP1~8设置nP+P,nP+N和nP-P,nP-N输出引脚为+5v输出还是差分输出,缺省设置为差分输出;如图所示:注意:设置为+5v单端输出时,要防止外部噪声窜入PCI-1240.III.JP9 Enable/Disable紧急停止功能,如图所示:2)单块板卡安装:I.关闭计算机电源;II.将PCI-1240卡插在计算机的任一PCI槽上;III.重新开启计算机,系统会自动寻找到PCI-1240,根据提示点击Next添加PCI-1240驱动;3)多块板卡安装:I.将板卡的BoardID DIP开关设置成不同的值(不能有重复);II.先将一块板卡插在一PCI槽,根据单块板卡安装方法,添加驱动;III.然后关机,根据单块板卡安装方法,依次安装其他板卡。
台达电子PCI-DMC軸卡使用手册说明书

PCI-DMC 軸卡使用手冊台達電子工業股份有限公司機電事業群33068 桃園市桃園區興隆路18號TEL: 886-3-3626301FAX: 886-3-3716301*本使用手冊內容若有變更,恕不另行通知V1.0序言感謝您使用本產品,本使用手冊提供PCI-DMC運動控制軸卡的相關資訊。
本手冊內容包含⏹硬體規格⏹電器安全須知⏹軸卡PCB配置與接腳定義⏹接線範例⏹產品安裝與配件⏹硬體與軟體安裝⏹EzDMC說明PCI-DMC運動控制軸卡產品特色PCI-DMC運動控制軸卡提供了高機能多軸擴充功能,可在1 ms內同時操控12軸的DMCNET伺服驅動器,並支援多樣化的運動控制模組(直線補間、圓弧補間、螺旋補間、連續補間)。
完整的運動控制架構,將可滿足業界更多樣化的需求。
本產品為多軸同動控制的最佳整合平台,不僅在裝配上更容易、穩定性更佳、擴充性更具彈性、是產業再升級與產品加值的不二選擇。
如何使用本操作手冊您可視本手冊為學習使用PCI-DMC運動控制軸卡之參考資訊,手冊將告訴您如何安裝、設定、使用及維護本產品。
台達電子技術服務如果您在使用上仍有問題,歡迎洽詢經銷商或本公司客服中心。
(此頁有意留為空白)目錄PCI-DMC介紹1.1 環境的建構 ····································································································· 1-21.2 硬體規格 ········································································································ 1-31.3 電氣安全須知 ·································································································· 1-41.4 PCB配置 ······································································································· 1-51.5 連結器腳位介紹 ····························································································· 1-101.5.1 PCI-DMC-A02 ························································································· 1-101.5.2 PCI-DMC-B01 ························································································· 1-141.5.3 PCI-DMC-B02 ························································································· 1-191.5.4 PCI-DMC-F01 ························································································· 1-221.5.5 PCI-DMC-F02 ························································································· 1-251.6 接線範例 ······································································································ 1-291.6.1 PCI-DMC-A02/F02/B01/B02輸入點連結外部裝置接線 ····································· 1-291.6.2 PCI-DMC- A02/F02/B01/B02輸出點連結外部裝置接線 ····································· 1-301.6.3 PCI-DMC-B01/B02高速計數器接線 ····························································· 1-311.6.4 3.3 V Compare Output接線(CN9/CN10) ······················································· 1-321.7 軸卡相容性 ··································································································· 1-33安裝介紹2.1 產品包裝與配件 ······························································································· 2-22.2 硬體安裝 ········································································································ 2-22.3 驅動程序軟體安裝前置作業················································································· 2-32.4 驅動程序軟體安裝 ···························································································· 2-72.4.1 軟體安裝程序 ···························································································· 2-72.4.2 軟體安裝程序(Windows 7 64-bit) ·································································· 2-102.5 檢視軟體包安裝結果 ························································································· 2-142.5.1 檢視軟體安裝成功 ···················································································· 2-142.5.2 檢視軟體安裝失敗 ···················································································· 2-152.6 軟體安裝失敗的處置 ······················································································· 2-162.7 將軸卡安裝在其它PCI插槽 ·············································································· 2-182.8 手動安裝驅動程序 ·························································································· 2-222.9 BCB範例使用說明·························································································· 2-29EzDMC操作說明3.1 EzDMC功能簡介 ····························································································· 3-2 3.2 EzDMC通訊連結程序 ······················································································· 3-3 3.3 搜尋PCI-DMC軸卡 ·························································································· 3-3 3.4 尋找連結的擴充模組裝置···················································································· 3-4 3.5 EzDMC的狀態列顯示 ······················································································· 3-5 3.6 串列式Motion單軸操作介面 ··············································································· 3-6 3.8 Master Security 操作介面 ················································································ 3-10 3.9 軸卡重置 ······································································································ 3-13 3.10 參數儲存功能說明 ·························································································· 3-14PCI-DMC介紹在使用PCI-DMC之前,本章節簡介PCI-DMC環境建構、硬體規格、安全須知、PCB配置、PCI_DMC腳位連接與接線範例作說明。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PCI-1240快速入门手册目录第一章PCI-1240 安装1.1 1.2 PCI-1240 Driver 与Utility 安装PCI-1240 硬件安装第二章PCI-1240 与驱动器接线2.1 PCI-1240 针脚描述2.2 PCI-1240 与驱动器连接第三章PCI-1240 测试3.1 PCI-1240 Utility 使用第四章PCI-1240 软件编程4.1 PCI-1240 软件编程第五章附录1. PCI-1240 Utility 界面说明:第一章PCI-1240安装1.1 PCI-1240 Driver与Utility安装在使用pci-1240 之前必须安装pci-1240 驱动,驱动安装步骤:A) 将研华提供的驱动光盘置于光驱中,出现如下画面:B) 点击Installation 选项,出现如下画面:C) 点击Individual Driver,出现如下画面:D) 选择Motion Control Cards 中选项PCI-1240,点击安装PCI-1240 驱动;1.2 PCI-1240 硬件安装:1) PCI-1240 跳线设置:I. BoardID 设置:通过设置板卡上DIP 开关可以设置PCI-1240的BoardID 从0-15。
II. JP1~8 设置nP+P,nP+N 和nP-P,nP-N 输出引脚为+5v 输出还是差分输出,缺省设置为差分输出;如图所示:注意:设置为+5v单端输出时,要防止外部噪声窜入PCI-1240.III. JP9 Enable/Disable 紧急停止功能,如图所示:2) 单块板卡安装:I. 关闭计算机电源;II. 将PCI-1240 卡插在计算机的任一PCI 槽上;III. 重新开启计算机,系统会自动寻找到PCI-1240,根据提示点击Next 添加PCI-1240 驱动;3) 多块板卡安装:I. 将板卡的BoardID DIP 开关设置成不同的值(不能有重复);II. 先将一块板卡插在一PCI 槽,根据单块板卡安装方法,添加驱动;III. 然后关机,根据单块板卡安装方法,依次安装其他板卡。
第二章PCI-1240与驱动器接线2.1 PCI-1240针脚描述:图2-1 PCI-1240 针脚定义图表2-1 PCI-1240 针脚定义说明针脚名称参考地输入/输出说明VEX * 输入外部电源(12-24v)EMG * 输入紧急停止信号(所有轴)XLMT+ * 输入X 轴+方向限位控制信号输入XLMT-* 输入X 轴-方向限位控制信号输入XIN1 * 输入X 轴减速/立即停止信号XIN2 * 输入X 轴减速/立即停止信号XIN3 * 输入X 轴减速/立即停止信号YLMT+ * 输入Y 轴+方向限位控制信号输入YLMT-* 输入Y 轴-方向限位控制信号输入YIN1 * 输入Y 轴减速/立即停止信号YIN2 * 输入Y 轴减速/立即停止信号YIN3 * 输入Y 轴减速/立即停止信号XINPOS * 输入X 到位输入信号XALARM * 输入X 轴伺服驱动器错误报警信号XECAP * 输入X 轴编码器A 相+输入XECAN * 输入X 轴编码器A 相-输入XECBP * 输入X 轴编码器B 相+输入XECBN * 输入X 轴编码器B 相-输入XINOP * 输入X 轴编码器Z 相+输入XINON * 输入X 轴编码器Z 相-输入YINPOS * 输入Y 到位输入信号YALARM * 输入Y 轴伺服驱动器错误报警信号YECAP * 输入Y 轴编码器A 相+输入YECAN * 输入Y 轴编码器A 相-输入YECBP * 输入Y 轴编码器B 相+输入YECBN * 输入Y 轴编码器B 相-输入YINOP * 输入Y 轴编码器Z 相+输入YINON * 输入Y 轴编码器Z 相-输入XEXOP+ * 输入X 轴慢进+向输入XEXOP- * 输入X 轴慢进-向输入YEXOP+ * 输入Y 轴慢进+向输入YEXOP- * 输入Y 轴慢进-向输入GND * * 接地脚XOUT4 GND 输出X 轴通用输出脚XOUT5 GND 输出X 轴通用输出脚XOUT6 GND 输出X 轴通用输出脚XOUT7 GND 输出X 轴通用输出脚sXP+P GND 输出X 轴CW/Pulse +输出XP+N GND 输出X 轴CW/Pulse -输出XP-P GND 输出X 轴CCW/DIR +输出XP-N GND 输出X 轴CCW/DIR -输出GND * * 接地脚YOUT4 GND 输出Y 轴通用输出脚YOUT5 GND 输出Y 轴通用输出脚YOUT6 GND 输出Y 轴通用输出脚YOUT7 GND 输出Y 轴通用输出脚sYP+P GND 输出Y 轴CW/Pulse +输出YP+N GND 输出Y 轴CW/Pulse -输出YP-P GND 输出Y 轴CCW/DIR +输出YP-N GND 输出Y 轴CCW/DIR -输出VEX * 输入外部电源(12-24v)ZLMT+ * 输入Z 轴+方向限位控制信号输入ZLMT-* 输入Z 轴-方向限位控制信号输入ZIN1 * 输入Z 轴减速/立即停止信号ZIN2 * 输入Z 轴减速/立即停止信号ZIN3 * 输入Z 轴减速/立即停止信号ULMT+ * 输入U 轴+方向限位控制信号输入ULMT-* 输入U 轴-方向限位控制信号输入UIN1 * 输入U 轴减速/立即停止信号UIN2 * 输入U 轴减速/立即停止信号UIN3 * 输入U 轴减速/立即停止信号ZINPOS * 输入Z 到位输入信号ZALARM * 输入Z 轴伺服驱动器错误报警信号ZECAP * 输入Z 轴编码器A 相+输入ZECAN * 输入Z 轴编码器A 相-输入ZECBP * 输入Z 轴编码器B 相+输入ZECBN * 输入Z 轴编码器B 相-输入ZINOP * 输入Z 轴编码器Z 相+输入ZINON * 输入Z 轴编码器Z 相-输入UINPOS * 输入U 到位输入信号UALARM * 输入U 轴伺服驱动器错误报警信号UECAP * 输入U 轴编码器A 相+输入UECAN * 输入U 轴编码器A 相-输入UECBP * 输入U 轴编码器B 相+输入UECBN * 输入U 轴编码器B 相-输入UINOP * 输入U 轴编码器Z 相+输入UINON * 输入U 轴编码器Z 相-输入ZEXOP+ * 输入Z 轴慢进+向输入ZEXOP- * 输入Z 轴慢进-向输入UEXOP+ * 输入U 轴慢进+向输入UEXOP- * 输入U 轴慢进-向输入GND * * 接地脚ZOUT4 GND 输出Z 轴通用输出脚ZOUT5 GND 输出Z 轴通用输出脚ZOUT6 GND 输出Z 轴通用输出脚ZOUT7 GND 输出Z 轴通用输出脚sZP+P GND 输出Z 轴CW/Pulse +输出ZP+N GND 输出Z 轴CW/Pulse -输出ZP-P GND 输出Z 轴CCW/DIR +输出ZP-N GND 输出Z 轴CCW/DIR -输出GND * * 接地脚UOUT4 GND 输出U 轴通用输出脚UOUT5 GND 输出U 轴通用输出脚UOUT6 GND 输出U 轴通用输出脚UOUT7 GND 输出U 轴通用输出脚sUP+P GND 输出U 轴CW/Pulse +输出UP+N GND 输出U 轴CW/Pulse -输出UP-P GND 输出U 轴CCW/DIR +输出UP-N GND 输出U 轴CCW/DIR -输出2.2 PCI-1240与驱动器连接:1、与UPK 步进电机驱动器连接:说明:外加DC24v 电源,采用CW/CCW 驱动方式驱动,温度报警通过XALARM 引脚输入。
2、与MINAX X 系列交流伺服电机驱动器连接:说明:板卡采用DC24v 供电,采用CW/CCW 方式驱动。
编码器返回信号依次按图示连接到X 轴的编码器输入脚(XECAP,XECAN,XECBP,XECBN,XINOP, XINON)上。
HOME 引脚接XIN1,限位信号接到XLMT+,XLMT-上。
接线注意事项:1.信号线必须远离动力电源线、大电动机、断路器、电焊机等大的电磁源以及视频监视器等;2. 如果信号线穿过,必须单独隔离,采用屏蔽双绞线作为输入信号线,并且屏蔽双绞线的隔离层只能接一端的地;3. 信号线和电源线不能布置同一管道中;4. 如果信号线和电源线必须平行放置时,两线之间必须保持足够的距离;5. 信号的质量与传输信号线有很大的关系,我们推荐使用我们的PCL-10251信号线缆;第三章PCI-1240测试3.1 PCI-1240 Utility使用:1、启动PCI-1240:开始—>Advantech Automation—>Motion—>PCI-1240 —>PCI-1240 Utility,如图界面:2、点击Board Selection 选择板卡并点击OK 按纽:4、击Parameters Setting 按纽,设置运动控制参数(具体设置参照附录参数设置说明:),如图:5、设置好参数以后,点击Save 按纽,出现如下画面,然后点击Yes:6、点击Input Status 按纽,显示输入监视画面:7、点击Operation 按纽,出现运行截面,如图所示:7、点击Profile Monitor 按纽,显示监视运动画面,如图:第四章软件编程4.1 PCI-1240软件编程:研华公司PCI-1240 运动控制卡提供基于WIN98/2000 下32 位DLL 驱动编程,具体编程方法请参考PCI-1240 Manual 编程文档,位置如下:此外,我们提供VB、VC 例程供参考,路径位于安装目录下(如D:\Program Files\ADVANTECH\Motion\PCI-1240\Examples)。
附录1、PCI-1240 Utility各界面参数说明:A.Group1 参数设置说明:36 457 181——选择任意轴,点击Load 按纽,加载该轴上次Group1 参数设置;2——选择电机驱动器脉冲输出方式:CW/CCW 方式或Pulse/DIR 方式;3——选择电机驱动器慢进方式(JOG)脉冲输出高低电平,High 或Low有效;4——选择电机驱动器慢进方向(JOG)低电平正转/高电平反转,还是相反;5——选择加速方式,梯形方式或S 形方式加速;6——设置Multiplier(1—500),其他的参数会相应地改变;7——设置运行参数:Initial Speed——设置初始速度(SV);Driver Speed——设置驱动速度(DV);Max Drive Speed——设置最大驱动速度(MDV);Acc./Dec.——设置速度变化率/加速度(ACC);Rate of Acceleration——设置加速度变化率(AK);8——选择任意几轴,点击Save 保存以上设置参数;此外Reset 按纽是复位PCI-1240 至初始化状态,Exit 按纽退出设置。