SVPWM过调制技术在同步电机控制系统中的应用(审稿后修改)
SVPWM控制技术及其应用
SVPWM控制技术及其应用摘要 :空间矢量脉宽调制(SVPWM)是控制永磁同步电机的一种控制方式。
SVPWM的原理是利用逆变器各桥臂开关控制信号的不同组合,使逆变器的输出电压矢量的运行轨迹尽可能接近圆形。
SVPWM技术应用于交流调速系统中不但改善了脉宽调制((PWM)技术存在电压利用率偏低的缺点,而且具有转矩脉动小、噪声低等优点。
本文对SVPAM的控制技术及其应用进行了较为详细的阐述。
关键词 :永磁同步电机;矢量控制;变频调速SVPWM Control Technique and ApplicationFu Rong-bing(Henan Polytechnic University,School of Electrical Engineering and Automation)Abstract: Space vector pulse width modulation(SVPWM)is a method to control the PMSM motor.The principle of SVPAM is using every inverter bridge switch control signal of different combination,make the operation of the inverter output voltage vector trajectory as close as possible to the circular. SVPWM technology applied in AC speed regulation system can not only improve the shortcoming of low voltage utilization in the pulse -width modulation (PWM) technology , but have little torque ripple,low noise advantages. In this paper, the SVPAM control technology and application are discussed in detail.Key words: permanent magnet synchronous motor;motor Vector control; Frequency control of motor spector1引言SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
基于SVPWM的异步电机变频调速系统的研究

基于SVPWM的异步电机变频调速系统的研究异步电机变频调速系统是现代电力系统中常用的一种调速方法,其通过改变电机的供电频率达到调节电机转速的目的。
随着电力电子技术的发展,基于空间矢量脉宽调制(SVPWM)的异步电机变频调速系统逐渐成为研究的热点。
本文将从SVPWM工作原理、SVPWM调速系统的基本结构和控制策略等方面对基于SVPWM的异步电机变频调速系统展开详细研究。
首先,介绍SVPWM的工作原理。
SVPWM是一种综合利用直流信号和交流信号来控制逆变器输出的方法,其通过合理的调节直流信号和交流信号的幅值和相位来实现对逆变器输出电压的控制。
SVPWM可以有效地提高电机的工作效率和调速响应速度,同时减小电机的谐波失真。
其次,介绍SVPWM调速系统的基本结构。
SVPWM调速系统主要由电源模块、逆变器模块、电机模块和控制模块组成。
电源模块负责提供电源电压,逆变器模块将直流电压转换为交流电压供给电机,电机模块将交流电压转换为机械能,控制模块对整个系统进行调节和控制。
然后,详细介绍SVPWM调速系统的控制策略。
SVPWM调速系统的控制策略可以分为开环控制和闭环控制两种方式。
对于开环控制,控制算法主要基于电机的数学模型,通过计算电机的工作状态和控制信号来实现对电机转速的调节。
而对于闭环控制,则需要实时采集电机的转速信息,通过反馈控制来实现对电机转速的精确调节。
最后,对基于SVPWM的异步电机变频调速系统的未来发展进行展望。
随着电力电子技术的进一步发展,基于SVPWM的异步电机变频调速系统将进一步提高其控制精度和调速性能,为各个工业领域提供更加可靠和高效的动力系统。
综上所述,基于SVPWM的异步电机变频调速系统是一种非常有潜力的调速方法。
通过深入研究SVPWM的工作原理、调速系统的基本结构和控制策略,可以更好地实现对异步电机的精确调速控制。
同时,基于SVPWM的异步电机变频调速系统也将在未来的发展中得到进一步的完善和应用。
空间电压矢量调制svpwm技术

空间电压矢量调制svpwm技术
空间电压矢量调制(Space Vector Pulse Width Modulation,简称SVPWM)是一种在电机控制中得到普遍应用的一种技术。
它具有传统占空比调制(Pulse Width Modulation,简称PWM)电流良好的性能和空间矢量调制(Space Vector Modulation,简称SVM)的矢量控制优势。
SVPWM的动作变的更为温和,不会出现PWM的跳变峰值,也不会出现SVM的明显的数字步进现象。
同时,SVPWM可以实现更高的转矩精度。
SVPWM技术是由角度切换极坐标系和占空比调制矢量矢量组成,用以驱动同步电机的一种方法。
其特点是:采用多相电容网络,根据外部控制计算输出控制矢量,通过最小二乘算法,得到三相电压控制矢量,可以在模拟和数字单元之间进行无损变换。
最后,再将计算出的三控制矢量分解为二级占空比和重迭开关信号,在这个过程中不需要使用任何滤波器或步进正弦发生器,也可以实现电流的控制。
SVPWM算法研究与试验应用

SVPWM算法研究与试验应用SVPWM算法是一种针对空间矢量调制技术的高级控制算法,用于对三相交流电机进行精密控制。
该算法可以通过改变参考电压矢量的相位和大小,控制电机的电流和速度,并且具有较高的动态响应能力和控制精度。
SVPWM算法的基本原理是通过将三相交流电压转换为一个空间矢量,并将其控制在一个特定的方向和大小,从而实现电机驱动控制。
具体而言,该算法将三相电压看作一个三角形,通过通过调整参考电压的大小和相位,控制电机的电流和速度。
其中,电机的电流和速度与参考电压的相位差和大小有关。
SVPWM算法适用于多种交流电机驱动控制,如变频空调、电动汽车、电动机、风电等领域,广泛应用于工业自动化和控制系统中。
在实际应用中,为了提高算法的可靠性和灵活性,通常需要通过建立基于SVPWM算法的电机模型和控制系统,进行动态仿真和试验分析,以验证控制算法的性能和有效性。
在电机控制系统中,SVPWM算法通常与其他控制算法组合使用,如PID控制、电流矢量控制、位置控制等,实现更加稳定和高效的电机驱动控制。
同时,也需要针对不同应用场景和电机参数调整控制系统的参数和配置,以保证控制系统的效率和精度。
总之,SVPWM算法作为一种高级控制算法,在工业自动化和控制系统中具有广泛的应用前景。
通过建立电机模型和控制系统,可以实现SVPWM算法的实验验证和优化,同时也可以使控制系统更加灵活和智能,为电机控制和工业应用带来更大的价值和效益。
为了更好地了解市场变化和消费者需求,许多公司会收集大量的数据并进行分析。
以下是一些可能的相关数据,以及对其进行分析的例子。
1. 销售额数据:通过对销售额数据进行分析,公司可以了解销售趋势和产品受欢迎程度。
例如,如果一家服装公司发现一种特定的衣服款式最近的销售额增加了很多,那么他们可能会考虑生产更多这种衣服款式。
2. 消费者调研数据:消费者调研数据可以帮助公司了解消费者的喜好和需求,从而制定更好的营销策略和产品开发计划。
svpwm快速实现方法及其在电机驱动中的应用

svpwm快速实现方法及其在电机驱动中的应用《svpwm快速实现方法及其在电机驱动中的应用》一、介绍在现代电机驱动系统中,空间向量脉宽调制(SVPWM)技术作为一种高效、精确的电机控制方法,广泛应用于交流电机的驱动中。
本文将介绍SVPWM的快速实现方法,并讨论其在电机驱动中的应用。
二、SVPWM的基本原理SVPWM是通过控制电机三相电压的大小和相位来实现对电机的精确控制。
其基本原理是将电机三相电压转换为一个空间向量,然后通过调制这个空间向量来控制电机的转速和转矩。
在SVPWM中,通过合理的空间向量拟合和PWM信号生成,可以实现对电机的无感应、高精度控制。
三、SVPWM实现方法1. 基于复向量旋转的SVPWM实现首先介绍了基于复向量旋转的SVPWM实现方法,该方法通过复数运算来实现空间向量的计算和PWM信号的生成。
复向量旋转方法适用于对SVPWM原理有深入理解并且对数学运算熟练的工程师,能够实现高精度的SVPWM控制。
2. 快速算法实现接着介绍了基于快速算法的SVPWM实现方法,该方法通过查表和逻辑运算来快速计算出SVPWM所需的PWM信号。
快速算法实现方法简化了SVPWM的计算过程,降低了计算复杂度,提高了实时性,适合于对SVPWM控制要求高,且对算法实现有一定挑战的工程师。
四、SVPWM在电机驱动中的应用1. 实现高效节能的电机控制通过SVPWM技术,可以精确控制电机的转速和转矩,实现高效节能的电机控制。
SVPWM在各种类型的电机中都有广泛的应用,包括感应电机、同步电机和永磁同步电机等。
2. 提高电机系统的动态响应性能SVPWM技术能够快速、精确地控制电机的输出,从而提高电机系统的动态响应性能。
在需要高动态性能的应用中,如电动汽车、电梯和风力发电机等,SVPWM技术的应用可以显著提高系统的性能指标。
3. 降低电机系统的噪音和振动由于SVPWM技术可以精确控制电机的输出,可以降低电机系统的噪音和振动。
SVPWM逆变器过调制策略对交流电机动态性能影响的研究的开题报告
SVPWM逆变器过调制策略对交流电机动态性能影响的研究的开题报告1.研究背景随着电力电子技术的发展,逆变器已成为交流电机调速控制的重要部分。
传统的脉宽调制(PWM)策略在逆变器控制中得到广泛应用,但它具有调制波形有限、谐波含量高等缺点。
为了解决这些问题,SVPWM(Space Vector Pulse Width Modulation)过调制策略被引入逆变器控制中,其优点是调制波形质量高,谐波含量少,控制精度高等。
然而,SVPWM过调制策略的复杂性和计算量大,对控制器的要求较高,需要对其动态性能进行深入研究。
2.研究目的本次研究旨在探究SVPWM过调制策略对交流电机动态性能的影响,分析过调制对驱动系统的稳定性和控制精度的影响,为逆变器控制策略的研究提供理论基础。
3.研究内容和方法研究内容:(1)通过建立逆变器与交流电动机的数学模型,研究SVPWM过调制策略在控制过程中的具体实现并探究其调制波形特性。
(2)研究过调制策略对交流电机运行性能的影响。
根据实验结果,分别分析过调制后的电机转速、转矩、电流等运行状态,并与传统PWM策略进行对比,分析SVPWM过调制策略相对优势与劣势。
(3)采用MATLAB/Simulink软件对SVPWM逆变器进行建模,进行仿真分析,通过对比传统PWM和SVPWM过调制策略的控制效果,进一步验证理论模型和测试数据。
研究方法:(1)文献调研法:调研和分析已有关于SVPWM和PWM逆变器控制策略的研究成果,为本次研究提供理论基础。
(2)实验法:通过实验测试电机的转速、转矩、电流等运行状态,分析SVPWM 过调制策略在控制过程中的作用。
(3)仿真法:采用MATLAB/Simulink软件进行SVPWM逆变器的建模和仿真,验证理论模型和测试数据的正确性。
4.研究意义和预期结果本次研究可以为SVPWM逆变器的应用提供技术支持,比较传统PWM与SVPWM 过调制的控制精度和稳定性,为逆变器控制策略的研究提供新思路。
SVPWM的原理讲解以及应用过程中的推导与计算
SVPWM的原理讲解以及应用过程中的推导与计算SVPWM(空间矢量调制技术),是一种电机调速技术,通过在三相电流中引入一个辅助电流,将三相电流分解为一个基础正弦波电流和一个辅助电流,然后根据基础正弦波电流和辅助电流的大小和相位关系,控制电机输出的磁场方向和大小。
SVPWM可以提高电机的效率和控制精度,并减小电机的振动和噪音。
1.电机模型分析:首先,对电机进行建模和分析。
通过将电机抽象为一个旋转矢量图,分析电机的磁场分布和电流控制。
2.空间矢量图:根据电机模型分析,可以得到电机的矢量图。
矢量图用于描述电机的磁场方向和大小,有助于理解电机的运行原理。
3.矢量控制:根据矢量图,可以控制电机的磁场方向和大小。
通过控制电流矢量的大小和相位关系,可以控制电机的输出磁场。
4.空间矢量调制:SVPWM通过将电流矢量分解为一个基础正弦波电流和一个辅助电流,再根据它们的大小和相位关系,控制电机的输出磁场。
辅助电流可以用来改变电机的输出磁场方向,基础正弦波电流用来控制电机的输出磁场大小。
5.SVPWM计算:为了实现SVPWM,需要对电流进行计算和控制。
首先,根据需要的输出磁场向量,计算出对应的辅助电流和基础正弦波电流。
然后,根据电机的控制策略,计算出实际的电流指令。
在计算辅助电流和基础正弦波电流时,可以采用矢量旋转和空间矢量分解的方法。
通过将输出磁场向量进行数学运算和变换,可以得到电流矢量的大小和相位。
具体的计算过程可以按照以下步骤进行:1.确定需要的输出磁场向量的大小和相位。
2.将输出磁场向量进行矢量旋转和变换,得到一个新的矢量。
矢量旋转和变换的具体方法可以根据电机的控制策略和转子位置来确定。
3.将新的矢量分解为一个基础正弦波电流和一个辅助电流。
辅助电流用于改变输出磁场的方向,基础正弦波电流用于控制输出磁场的大小。
4.根据基础正弦波电流和辅助电流的大小和相位关系,计算出实际的电流指令。
根据电机的控制策略,可以使用速度环、电流环等控制器来计算输出的电流指令。
svpwm的调制原理及其应用
SVPWM的调制原理及其应用1. 什么是SVPWM(Space Vector Pulse Width Modulation)调制法?SVPWM是一种常用于交流电力电子变换器中的调制技术。
它通过控制电压的矢量和宽度,以实现对电机的精确控制。
SVPWM调制法具有高效、精确以及低谐波的优点,被广泛应用于电机驱动和变频器控制系统中。
2. SVPWM的原理SVPWM的原理基于空间矢量图。
在三相交流电系统中,通过控制三个相电压,可以产生一个旋转的磁场。
SVPWM将矢量分解为两个相邻矢量和一个零矢量来表示,通过适当的矢量合成和特定的PWM技术,可以实现电机的精确控制。
SVPWM的基本原理如下:1.将输入的三相电压转换为旋转矢量。
2.计算出所需的电机磁通矢量。
3.将磁通矢量分解为相邻矢量和零矢量。
4.通过调整相邻矢量的宽度,控制电流大小。
5.通过控制PWM波形的频率和占空比,控制电机输出的转速。
3. SVPWM的应用SVPWM调制技术在电机驱动和变频器控制系统中得到了广泛应用。
以下是SVPWM调制法的几个常见应用:3.1 电机驱动SVPWM技术可以精确控制三相电机的转速和转矩。
通过调整矢量合成和PWM 波形,可以实现电机的平稳运行,并且降低失去步的风险。
此外,SVPWM调制法还能够减小电机运行时的噪音和振动。
3.2 变频器控制系统SVPWM调制技术被广泛应用于变频器控制系统中。
变频器可以将输入电源的频率和电压转换为所需的输出,以满足不同的负载需求。
SVPWM调制法能够提供高效、可靠的控制方式,使得变频器能够有效地控制负载。
3.3 电网接口SVPWM技术还可以应用于电网接口中。
电网接口是将分布式能源(如太阳能、风能)与电网进行连接的装置。
SVPWM调制技术可以控制电能的输入和输出,实现电网与分布式能源的平衡,并确保电网的稳定运行。
3.4 可再生能源系统在可再生能源系统中,如风力发电、太阳能发电等,SVPWM调制技术可以有效管理电能的转换和输送。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基金项目:陕西省科技统筹创新工程计划(2013KTCQ01-20)作者简介:卫丽超 女,1991年生,硕士研究生,研究方向为电机与电机控制; 刘景林 男,1964年生,教授,博士生导师,研究方向为电机及其控制 SVPWM 过调制技术在同步电机控制系统中的应用卫丽超,刘景林,鲁家栋,杨奔(西北工业大学自动化学院,西安,710129)摘要:空间电压脉宽调制(SVPWM )技术在永磁同步电机(PMSM)矢量控制中已经得到了广泛的应用,但当逆变器输出电压达到最大值时,电机转速便受到限制,此时逆变器输出电压没有达到母线电压的最大值,所以电压利用率较低。
SVPWM 过调制技术可以在母线电压不变的情况下增大逆变器输出电压,提高母线电压的利用率,进而提高电机的最高转速和负载转矩。
本文介绍了一种SVPWM 过调制方法,该方法模型简单,易于编程,并通过仿真和实验验证了其正确性,在工程应用中具有较好的应用价值。
关键词:永磁同步电机; 空间电压脉宽调制; 过调制 中图分类号:TM341;TM351 文献标志码:AApplication of SVPWM Overmodulation Technique in the PMSM Control SystemWei lichao ,Liu jinglin ,Lu jiadong ,Yang ben(School of Automation Northwestern Polytechnical University Xi’an 710129 China)Abstra ct :SVPWM technology has been widely used in permanent magnet synchronous motor (PMSM) vector control system. But the motor speed is limited when the inverter output voltage get maximum. And the bus voltage utilization ratio is low because the inverter output voltage has not reached the maximum of bus voltage. SVPWM Over modulation technology can increase the inverter output voltage when the bus voltage remains the same. It will be improve the utilization rate of bus voltage. And also improve the speed and load torque of the PMSM. This paper introduces a kind of SVPWM overmodulation method. It is simple modeling and easy to programming. And the method is verified by simulation and experiment. It has good value in engineering application. Key words :PMSM; SVPWM; Overmodulation0引言永磁同步电机由于其结构简单、运行可靠,具有高功率因数和高效率的特点,广泛应用于航空航天、数控机床、工业机器人和制造业等高性能自动化设备领域中[1]。
空间电压矢量脉宽调制(SVPWM )控制技术使得同步电机转矩脉动小、调速范围宽、动态响应快。
但是逆变器输出电压随着电机转速的升高达到最大时,电机相电流不能再增大,此时合成电压矢量幅值U ∗=U dc /√3,U dc 为逆变器直流侧母线电压[1~3]。
SVPWM 过调制技术可以提高母线电压的利用率,提高逆变器的输出电压,从而提高电机的最高转速和负载转矩,在机床加工行业中,可以显著地提升加工速度,具有广泛的应用前景和显著的经济效益。
本文给出了一种SVPWM 过调制策略,在Matlab/Simulink 中搭建模型,仿真及实验结果验证了本文的正确性。
1 SVPWM 原理及过调制算法的实现SVPWM 调制分为线性调制区域和过调制区域。
SVPWM 根据伏秒平衡原则,通过在一个PWM 周期内对8个基本电压矢量组合,使逆变器输出电压的平均值与给定电压矢量相等[4~7]。
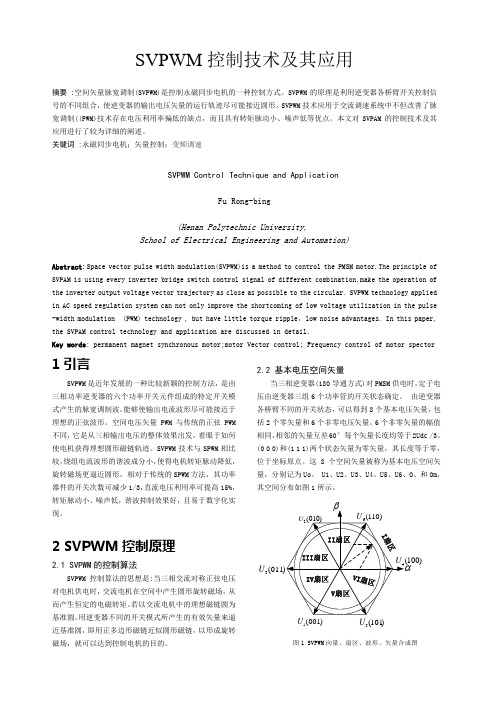
电压调制的控制指令是矢量控制系统给出的参考矢量信号U ∗,它以某一角频率在空间逆时针旋转,当旋转到矢量图的某个60°扇区中时,控制系统计算该区间所需的基本电压空间矢量,并以此矢量所对应的状态驱动功率管的开关。
在SVPWM 线性调制模式下,逆变器能够输出的最大不失真圆形旋转电压矢量为图1所示六边形内切圆,其幅值即逆变器输出的不失真最大正弦相电压幅值为U ∗=U dc /√3。
U图1 SVPWM 电压矢量图当参考电压矢量U ∗<U dc /√3时,如图2所示,假设参考电压矢量U ∗位于第Ⅰ扇区,可以选择相邻的矢量U 4、矢量U 6和零矢量来合成,如式(1)。
60U θ图2 电压空间矢量合成原理图{U α=|U ∗|cosθ=T 4T |U 4|+T 6T |U 6|cosπ3U β=|U ∗|sinθ=T 6T |U 6|sinπ3(1)所以:{T 4=√3T U dc (√32U α−12U β)T 6=√3TU dc U β (2)SVPWM 线性调制首先需要判断合成电压矢量U ∗处于六边形内哪一个扇区,然后根据式(2)计算U ∗相邻两个矢量的作用时间。
当零电压矢量作用时间为零时,一个PWM 周期T 内非零电压矢量的作用时间最长,此时的合成空间电压矢量幅值最大。
由图1可知其幅值最大不会超过图中所示的六边形边界。
当合成矢量落在该边界之外时,将发生过调制。
SVPWM 过调制策略主要有两种:电压相位跟随方法和电压幅值跟随方法[4,5]。
相位跟随方式是使输出电压相位与参考电压一致,这种方案谐波比较小,但由于其幅值存在一定偏差,不能实现母线电压的最大化利用。
幅值跟随方式则是使电压矢量的相位与参考值有偏差,保持幅值上的最大化输出,其谐波会有所增加。
根据参考电压矢量U ∗的幅值将SVPWM 过调制分为两个区域,当U dc /√3<U ∗<2U dc /3时,工作在过调制Ⅰ区,采用电压相位跟随方法。
当2U dc /3<U ∗<2U dc /√3时,工作在过调制Ⅱ区,采用电压幅值跟随方法。
1.1 SVPWM 过调制Ⅰ区算法SVPWM 过调制Ⅰ区算法为相位跟随算法,如图3所示,当合成参考电压矢量U dc /√3<U ∗<2U dc /3时,超出六边形的部分实际不能输出,此时要使实际输出电压基波和参考电压相等,需要对参考电压矢量幅值进行调整[1],将修正后的电压矢量限制在正六边形边界范围之内。
604图3 过调制Ⅰ区矢量调制原理图过调制Ⅰ区采用相位跟随算法,即不改变参考电压矢量的相位,仅改变其幅值,调整后使其位于矢量六边形内,如图3所示。
{θ1=θU1∗=U dc√3sin(θ−(n−2)π3)((n−1)π3≤θ≤(n−1)π3+π6) U1∗=U dc√3sin((n+1)π3−θ)((n−1)π3+π6≤θ≤(n−1)π3+π3)(3){T4=T4T4+T6T6=T6T4+T6(4)式(3)中n为扇区号(n=1,2,3,4,5,6),计算出新的角度θ1和新的参考电压矢量U1∗,此时,U1∗与U∗幅值比较接近,并且角度相同,用θ1和U1∗代替和θ和U∗。
再根据式(1)、(2)计算矢量作用时间,当两个矢量作用时间T4+T6>T时,用式(4)调整,完成SVPWM过调制。
图4 (a)为过调制Ⅰ区程序流程图。
(a)过调制Ⅰ区(b)过调制Ⅱ区图4 SVPWM过调制程序流程图1.2 SVPWM过调制Ⅱ区算法SVPWM过调制Ⅱ区算法为幅值跟随算法,当合成参考电压矢量2U dc/3<U∗< 2U dc/√3时,不仅需要对参考电压幅值进行调整,还需要改变其相位,如图5所示,将U∗调整到六边形内,得到新的参考电压矢量U2∗,具体方法为式(5)。
604α图5 过调制Ⅱ区矢量调制原理图当(n−1)π3≤θ≤(n−1)π3+π6;{θ2=π6+(n−1)π3−arctan(U∗sin(π6+(n−1)π3−θ)U/√3) U2∗=U dc√3sin(θ−(n−2)π3)当(n−1)π3+π6≤θ≤(n−1)π3+π3;{θ2=π6+(n−1)π3+arctan(U∗sin(θ−(π6+(n−1)π3))U/√3) U2∗=U dc√3sin((n+1)π3−θ)(5)此时U2∗与U∗幅值的误差最小,用U2∗和θ2代替U∗和θ。
式(5)的调整方法可能出现投影点超出六边形的情况,处理方法为,当θ处于第一扇区时,若θ</6π,则θ2=0,若θ>/6π,则θ2=/3π。
当U∗处于其他五个扇区,调整方法类似,即将U∗投影到六边形上,投影点的矢量即为新的U2∗,其幅值及角度就是调整后的电压矢量。
再根据式(1)、(2)计算矢量作用时间,过调制Ⅱ区程序流程图如图4 (b)所示。
当某一矢量作用时间T4(或T6)大于PWM周期T时,令T4(或T6)等于T,另一矢量作用时间T6(或T4)等于0。
当T4+T6>T,而T4、T6均小于周期T时,用式(4)调整。
SVPWM过调制算法具体实现方法是:判断U∗的幅值大小决定是否进入过调制区域以及处于过调制Ⅰ区或Ⅱ区。
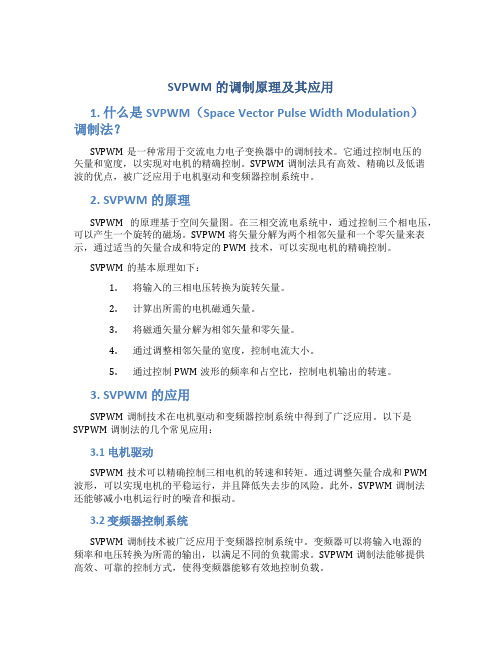
算法主流程图如图6所示:图6 SVPWM过调制算法主流程图2 永磁同步电机控制性能仿真及实验结果实验样机为内嵌式分数槽永磁同步电机,电机参数为:额定功率P=7.5kW,直流母线电压U dc=540V,定子电阻R=0.26Ω,直轴电感L d=0.0109H,交轴电感L q=0.0124H。
在Matlab/Simulink软件平台下搭建仿真模型,SVPWM过调制模型如图7所示。
图7 SVPWM过调制模型图8、图9分别是SVPWM线性区域调制电压轨迹图和过调制区域电压轨迹图,由图可以看出,SVPWM线性调制模式下,逆变器能够输出的最大不失真电压矢量近似圆形,而在过调制模式下输出电压矢量覆盖六边形,提高了直流母线电压的利用率。
图8 SVPWM线性调制电压轨迹图图9 SVPWM过调制电压轨迹图实验在美国Magtrol测功机平台上进行,实验平台如图10,利用日本Yokogawa高精度功率分析仪WT3000,控制器以DSP为核心,对永磁同步电机进行实验。