1-3直流脉宽调速系统
脉宽调节 pwm spwm 英文翻译(1-3)

毕业设计外文资料翻译学院:专业:姓名:学号:外文出处: Home Power #75·February/March2000 (用外文写)24.437 Power Electronics附件: 1.外文资料翻译译文;2.外文原文。
附件1:外文资料翻译译文自制程序脉冲幅宽调节——应用于12-24伏G.弗勒斯特库克宽幅脉冲调节器(PWM)可以作为调光器使用,还可以作为直流电机调速器。
这里所描述的设备可以控制几安培的直流电流。
该电路系统可以用于调节12-24伏内的微小变化。
此设备已被用于控制汽车尾灯亮度,以及电脑电源控制的小型直流风扇的转速。
脉冲幅宽调节一个PWM电路的工作原理是形成一系列占空比率可控的直流脉冲方波。
在平均时间内可以有0-100%的不同变化。
这样,就能把量化的电力传送到负载。
PWM电路相比于电阻功率控制器上的的主要优点是效率更高。
在PWM的50%的水平时,将使用全部功率的50%,几乎将所有这些都转移到负载。
而在电阻功率控制器的50%水平时,将消耗约全部功率的71%;50%的功率转移到负载,另外21%的能量浪费到了加热电阻上。
根据负载电流,通常PWM电路浪费的功率远低于1%。
它需要在连续恒定功率下运行,所以更多被用于高功率负载的效率提高。
优势能源再生系统中的关键是提高负载效率。
一个脉宽调制器的另一个优点是,有充分的脉冲电源电压,并且产生一个更容易克服电机内阻的更大的扭矩。
而一个电阻功率控制器对电机速度的控制会使电压减弱,这将导致电机反应延迟。
最后,在PWM电路,常见的小电位器可用于控制各种负载,而大型和昂贵的高功率可变电阻器必须要用电阻控制器。
缺点脉宽调制电路的主要缺点是增加了复杂性,和可能产生射频干扰(RFI)。
射频干扰会更少通过附近的负载控制器而通过短路线,而且在某些情况下,会通过额外的电源滤波线路。
该电路会产生调幅无线干扰,这些干扰在横跨负载电容(C3)的旁路形成,远离最近的引脚。
《电力拖动自动控制系统》课程综述

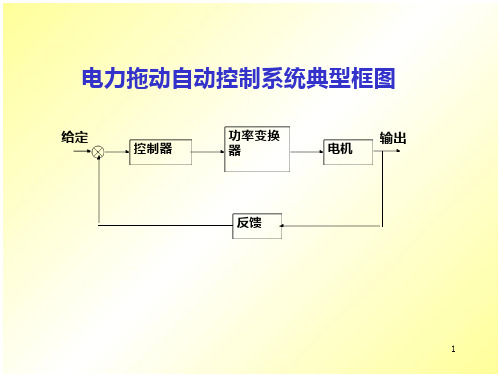
电力拖动自动控制系统电力拖动自动控制系统简介电力拖动自动控制系统包括:直流调速系统和交流调速系统。
直流调速系统包括:直流调速方法、直流调速电源和直流调速控制。
交流调速系统包括:交流调速系统的主要类型、交流变压调速系统、交流变频调速系统、绕线转子异步电机双馈调速系统——转差功率馈送型调速系统和同步电动机变压变频调速系统。
电力拖动自动控制系统课程内容介绍第一篇直流调速系统闭环反馈直流调速系统1.1 直流调速系统用的可控直流电源根据前面分析,调压调速是直流调速系统的主要方法,而调节电枢电压需要有专门向电动机供电的可控直流电源。
常用的可控直流电源有以下三种:旋转变流机组——用交流电动机和直流发电机组成机组,以获得可调的直流电压。
静止式可控整流器——用静止式的可控整流器,以获得可调的直流电压。
直流斩波器或脉宽调制变换器——用恒定直流电源或不控整流电源供电,利用电力电子开关器件斩波或进行脉宽调制,以产生可变的平均电压。
1.2 晶闸管-电动机系统(V-M系统)的主要问题本节讨论V-M系统的几个主要问题:(1)触发脉冲相位控制;(2)电流脉动及其波形的连续与断续;(3)抑制电流脉动的措施;(4)晶闸管-电动机系统的机械特性;(5)晶闸管触发和整流装置的放大系数和传递函数。
1.3 直流脉宽调速系统的主要问题自从全控型电力电子器件问世以后,就出现了采用脉冲宽度调制(PWM)的高频开关控制方式形成的脉宽调制变换器-直流电动机调速系统,简称直流脉宽调速系统,即直流PWM 调速系统。
(1)PWM变换器的工作状态和波形;(2)直流PWM调速系统的机械特性;(3)PWM 控制与变换器的数学模型;(4)电能回馈与泵升电压的限制。
1.4反馈控制闭环直流调速系统的稳态分析和设计本节提要:转速控制的要求和调速指标;开环调速系统及其存在的问题;闭环调速系统的组成及其静特性;开环系统特性和闭环系统特性的关系;反馈控制规律;限流保护——电流截止负反馈1.5 反馈控制闭环直流调速系统的动态分析和设计反馈控制闭环直流调速系统的动态数学模型;反馈控制闭环直流调速系统的稳定条件; 动态校正——PI调节器的设计;系统设计举例与参数计算转速、电流双闭环直流调速系统和调节器的工程设计方法内容提要:转速、电流双闭环控制的直流调速系统是应用最广性能很好的直流调速系统。
直流调速系统
GT
Ud
Id
-
- Un +
+ RP2
-
n
+ IG
-
U tg
V-M闭环系统原理框图
-
( a ) 给 定 环 节 —— 产 生 控 制 信 号 : 由 高 精 度 直 流 稳压电源和用于改变控制信号的电位器组成。 (b)比较与放大环节——信号的比较与放大;由P、I、 PI运放器组成
(c)触发器和整流装臵环节(组合体)--功率放大
nnom 1000r/min、 Ra=0.05Ω
晶闸管整流器的内阻
Ks=30 问 题
Rrec=0.13Ω
要求D=20,s≤5%
问若采用开环V-M系统能否满足要求? 若采用α=0.015V·min/r转速负反馈闭环系统,问放大 器的放大系数为多大时才能满足要求?
解(1)设系统满足D=20,检验系统是否满足s≤5%?
特点:
损耗较大、有级 调速,机械特性 较软。 (2)弱磁调速 特点: 只能弱磁,调 速范围小
工程上,常将调压与调磁相结合,可以扩大调速范围 。
n
Φn Φ2 Φ1 Φ1 Φ2 Φn nn Un U d3 U d2 U d1 Ten
图1-2 调压和调 磁时的机械特性
U d1 U d2 U d3 U n
①系统结构图
U n
Un U d0
电动机
U n
放大器
U ct 整流器及
触发装置
n
速度检测
②系统中各环节的稳态输入输出关系如下: 电压比较环节 放大器
* U n U n Un
U ct K P U n
晶闸管整流器及触发装臵 U d 0 K sU ct
直流脉宽调速系统的原理

直流脉宽调速系统的原理
直流脉宽调速系统是一种常用的电动机调速方法,其原理是通过控制电源给电动机供电的脉冲宽度,来调节电机转速。
具体原理如下:
1. 电源模块:系统通过电源提供给电动机稳定的直流电。
2. 控制模块:控制模块根据用户的需求,通过控制信号来调节电源输出的脉冲宽度。
一般常用的调速方法有开关调速和调整调速。
3. 脉冲宽度调制(PWM):控制模块输出的控制信号经过脉冲宽度调制(PWM),将模拟信号转换为脉冲信号。
脉冲的宽度表示电源供电的时间,具体宽度决定了电机的转速。
4. 电机驱动模块:控制模块输出的脉冲信号通过电机驱动模块传输给电机,控制电机的转速。
5. 反馈信号:在实际应用中,为了保证系统的稳定性和精度,会引入速度或位置的反馈信号,通过传感器采集电机的实际转速或位置,并反馈给控制模块,用于精确调节输出的脉冲宽度。
通过控制脉冲宽度的变化,可以改变电机驱动的平均电压和电流,从而控制电机的转速。
当脉冲宽度增加时,电机驱动的平均电流增大,电机转速也增加。
反之,
当脉冲宽度减小时,电机驱动的平均电流减小,电机转速降低。
总之,直流脉宽调速系统通过控制脉冲宽度来调节电机供电时间,从而控制电机的转速。
该系统具有调速范围广、调速响应快、控制精度高等优点,被广泛应用于各种需要调速控制的场合,如工业生产中的机械设备、自动化系统等。
直流脉宽调速驱动系统的研究

摘 要 : 直流 脉宽 调 速 系统 通 过改 变 P M 的 占空 比来 实现 对 直流 电动 机 的调 速 , 统包 括 控 制 电路 、 W 系 驱动 电
C Cn m b r P 7 L u e:T 2 3
D cm ̄ t o e ou d :A c
A t l :O 3 0 0 (0 8 0 — 0 8 0 ri eI 10 - 1 72 0 )7 0 2 — 3 c D
1引言
近十年来 , 我国 的电力拖 动控制 系统得 到迅猛发展 , 直流 拖动控制技术经历 了交磁 电机扩大机 系统 、 磁放大器控 制 、 晶 体管控 制 、 集成 电路控 制 、 计算机 控制 的发 展过 程 , 至今 已进 人了一个全新 的时 期 ,其主要标志 为智能功率集成 电路和数 字信号处理器 的出现 ,使 得控制 系统模 块化和全数 字化容易
路 、 电路 和保 护 电路 的设计 。 主 驱动 电路 由分 立元件 组成 , 电路结 构简 单 , 保护 功能 由单 片机 实现 后 , 电路 不需 本 要保护 , 以 系统 的组成 简单 , 价低 。主 电路 采用 的是 H 桥双 极性 电路 , 得 电动 机 可以 实现正 反转 。保 护 电 所 造 使 路 的保 护 功能是 把输 出 的电压值 或 电流值 与给定 值 比较后 , 如果 有故 障 向单 片机发 出 中断 申请 , U 响应 中断 CP 后数 据读入 , 由单 片机通 过软 件处 理完成 , 这种方 法单 片机 无需 进行变 换 时间 的管理 , U效 率 高。 CP
电力拖动自动控制系统--动控制系统(1)-
1.2 晶闸管-电动机系统(V-M系统)的主要问题
on
• ton不变,变 T —脉冲频率调制(PFM); • t 和 T 都可调,改变占空比—混合型。
on
40
• PWM系统的优点
1 主电路线路简单,需用的功率器件少; 2 开关频率高,电流容易连续,谐波少,电机损耗及发热
都较小; 3 低速性能好,稳速精度高,调速范围宽,可达1:10000左
右; 4 若与快速响应的电机配合,则系统频带宽,动态响应快
可调的直流电压。 • 直流斩波器或脉宽调制变换器——用恒定直流电源或不
控整流电源供电,利用电力电子开关器件斩波或进行脉 宽调制,以产生可变的平均电压。
28
1.1.1 旋转变流机组( G-M系统, Ward-Leonard系统)
图1-1旋转变流机组供电的直流调速系统(G-M系统)
29
• G-M系统特性
15
4. 电枢绕组的反电势
E是电枢旋转时,绕组切割主磁通Φ的结果,故和Φ与转速n的乘积
成正比。
式中:Ke—电动势结构系数,Ce —恒磁通电动势结构系数;
n—电动机转速,在此转速下,电动机的电磁转矩
Te正好与负
载转矩Tl相平衡,系统处于稳定运行状态。
16
5. 直流电动机的机械特性方程
1 理想空载转速n0 当Te=0时,n=n0;
34
35
➢ 晶闸管对过电压、过电流和过高的dV/dt与di/dt 都十分敏感,若超过允许 值会在很短的时间内损坏器件。 ➢ 当系统处在深调速状态,即在较低速运行时,晶闸管的导通角很小,使得 系统的功率因数很低,并产生较大的谐波电流,引起电网电压波形畸变,殃 及附近的用电设备。由谐波与无功功率引起电网电压波形畸变,殃及附近的 用电设备,造成“电力公害”。
直流脉宽调速系统
直流脉宽调速系统脉宽调速系统的主电路采纳脉冲宽度调制(PWM)式变换器,脉宽调制式变换器是采纳脉冲宽度调制的一种斩波器。
直流斩波器节能效果显著,最初应用于直流电力机车,目前在中、小容量的调速系统中已得到广泛的应用。
与“晶闸管--直流电动机”系统相比,直流脉宽调速系统具有如下特点:1)采纳绝缘栅双极性晶体管(IGBT)、功率场效应管(P-MOSFET)、门极可关断晶闸管(GTO)、全控电力晶体管等电子器件,主电路简洁,所需功率元件少;且主电路工作在开关状态,损耗少、效率高。
2)开关频率高、电流连续、谐波成分低、电动机损耗小。
3)系统频带宽,快速性好、动态抗干扰力量强。
4)系统低速性能好、调速范围宽、稳态精度高。
直流脉宽调速系统的静、动态特性分析方法和晶闸管相位掌握的直流调速系统基本相同,区分仅在于主电路和脉宽调制掌握电路。
与前述晶闸管直流调速系统不同,直流脉宽调速系统的脉宽调制放大器常采纳电力晶体管(GTR)、功率场效应管(MOSFET)、绝缘栅双极晶体管(IGBT)或功率集成芯片等器件替换晶闸管变流器,因而它具有功率元件比晶闸管直流调速系统少、线路简洁、系统功率因数好、脉宽调制频率高(达2kHz~3kHz)、系统反应快、电机低速运转平稳、调速范围宽等优点。
1. PWM直流不行逆调速系统图5-51为PWM直流不行逆调速系统原理图,图中ASR为转速调整器,ACR为电流调整器,GT为三角波发生器,GP为脉冲发生器,AOP为过电流爱护单元,BC为电流变换器,BV为速度变换器,其技术数据如表所示。
表PWM直流不行逆调速装置技术参数型号规格见各厂样本直流额定电压直流额定电流静差度调速范围适用电动机功率180V或220V10A、30A、60A≤+0.4%(最高速)1:500(测速发电机反馈)1kW~10kW 2. PWM直流可逆调速系统。
1-3 直流电动机的脉宽调制(PWM)调速
若VT1关断时间长,在t=t2时,电枢电流ia衰减 到零,那么在电动机内电势Ea的作用下,VT2导通, 电枢电流ia 将沿着相反的方向从B点流入A点,电机 进入能耗制动。通过控制VT2的时间间隔可以控制电 机的制动转矩 注意:在VT1重新导通之间,必须先关闭VT2, 让电枢电流经过VD1续流,电机短时进入再生制动状 态,否则在VT2还没有完全关断之前就让VT1导通, 电源经过VT2、VT1直接短路,损坏开关元件。
1、单极性脉宽调制方式 系统输出电压UA的极性是通过一个控制电压Uc 来改变的。 Uc为正,VT1与VT2交替导通,VT4一直导通, VT3关断,此时,B点总是为正,A点总是为负 Uc为负,VT3与VT4交替导通,VT2一直导通, VT1关断,此时,B点总是为负,A点总是为正
工作原理: Uc为正时 0<t<t1时,VT1导通,VT2关断,若Us>Ea, 电枢电流经VT1、VT4从B流到A,电机处在电动 机状态。 在t1<t<T时,VT1关闭,VD2与VT4续流,电枢 电流方向不变,电机仍处在电动机状态。 若在t1<t<T期间的某一时刻t2电枢电流衰减到 零,那么在t2<t<T期间,Ea使VT2导通,电枢电 流反向,经VT2、VD4从A流到B,电机进入能耗 制动状态 若Ea>Us,在VT2关断期间,电枢电流经VD1 和VD4输回电网,电机作再生制动 Uc为负时,原理与此类似,电机反向
如果电流连续,则电机始终处于电动状态 若在t1<t<T期间的某一时刻t2电枢电流衰减到 零,那么在t2<t<T期间,Us和Ea共同作用,使 VT2、VT3导通,电枢电流反向,经VT2、VT3从A 流到B,电机进入反接制动状态 在VT1、VT4再次导通之前,必须关断VT2、 VT3,电枢电流VD1、VD4续流,电机进入再生制 动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、PWM控制与变换器的数学模型
传递函数
U d (s) Ks −Ts s Gs ( s ) = = K se ≈ U c (s) Ts s + 1
Ks--PWM装置的放大系数 Ts--PWM装置的延迟时间
t on T − t on 2t on Ud = Us − Us = ( − 1)U s T T T
U d = γU s
γ = 2ρ − 1
VD1
U b1
VD3
§1-3 直流脉宽调速系统 可逆PWM PWM变换器 二、可逆PWM变换器 双极性可逆PWM变换器 (一)双极性可逆 变换器
+ Us VT1 VT3
Usa
Usa
+Uc
-Ub 0 Upw 0
-Ub 0 Upw
-Uc
t
0
t
a)Uc=0
b)Uc>0
b)Uc<0
1.3.3 脉宽调速系统的控制电路 二、逻辑延时环节
晶体管的关断过程包括存储 时间t 和电流下降时间t 时间 s和电流下降时间 f,总 关断时间t 称关断时间 off,这段时间内 晶体管并未完全关断 逻辑延时环节DLD保证在对 保证在对 逻辑延时环节 一个管子发出关闭脉冲后, 一个管子发出关闭脉冲后, 延时t 延时 ld后再发出对另一个管子 的开通脉冲
§1-3 直流脉宽调速系统
(三)受限单极性可逆PWM变换器 受限单极性可逆PWM变换器 PWM
+ Us VT1 VD1
U b1
VD3
VT3
U b3
A
M
B
VT2
U b2
VT4 VD2 VD4
U b4
课堂习题
为什么晶体管PWM-电动机系统比晶闸管-电 -电动机系统比晶闸管- 为什么晶体管 动机系统能获得更高的动态性能? 动机系统能获得更高的动态性能?
Ub
0
VD
M
ud
VT C t
Ub
E M VD
Us
Us
Ud E id t
ton T
t on Ud = U s = ρU s T ρ = t on T = U d U s -PWM电压的占空比 电压的占空比
§1-3 直流脉宽调速系统
1.不可逆PWM变换器 1.不可逆PWM变换器 不可逆PWM
VD2 3 2
U b2
U b1 = −U b 2
VT1 VD2 VT1
E M 4 VD1 1 C Us
Us ud
VT1
U b1
1
2 ton T
1
Ud E id t
§1-3 直流脉宽调速系统 1.不可逆PWM变换器 不可逆PWM 1.不可逆PWM变换器
U b1 = −U b 2
U b2
Us
Ud
U b1
Us
t on
T + t on
− id
U b1 = −U b 2
VD1
VD1 VT2 VT2 t
§1-3 直流脉宽调速系统 1.不可逆PWM变换器 不可逆PWM 1.不可逆PWM变换器
0
U
Us
E
Ud
t on
0
T T + t on
− id
制动状态的电压、 图4-2 制动状态的电压、电流波形
id
U b2
1 0
U b1
U b1
U b3
UAB +Us
U b2
0
U b4
t
-Us
id 0
1 1 4
2 2
1 1 3 4
2 2 3 4
t
二、可逆PWM变换器 可逆PWM变换器 PWM 双极性可逆PWM变换器 (一)双极性可逆 变换器
+ Us VT1 VD1
U b1
Ub1 Ub4 0
VT1 VT4
VD2 VD3
VT1 VT4
§1-3 直流脉宽(PWM)调速系统
脉宽调制PWM PWM变换器 1.3.1 脉宽调制PWM变换器
直流 直流 电源电压能否反相 不可逆 PWM变换器 变换器 可逆 双极性 单极性 受限单极性 控制方式
§1-3 直流脉宽调速系统
VT + Us L
强迫关断电路
1.不可逆PWM变换器 1.不可逆PWM变换器 不可逆PWM
VD2 VD3
VT1 VT4
t
Ub3 U b2 0
3 VT3
U b3
ton
T t
VD3
1
UAB +Us
A
M
B
0
-Us
t
VT2
U b2
VT4 VD2 2 VD4
U b4
id 0
4
1 1
2 2
1 1 3 4
2 2 3 4
t
双极性PWM PWM变换电路 图4-3 双极性PWM变换电路
双极性PWM PWM变换器电压和电流波形 图4-4 双极性PWM变换器电压和电流波形
§1-3 直流脉宽调速系统
(二)单极性可逆PWM变换器 单极性可逆PWM变换器 PWM
+ Us VT1 VD3 VD1
U b1
VT4
Ub4
VD2
VT3
Ub3 Ub1
U b3
A
M
B
0 Ub2 0
UAB +Us
VT1
VT1
VT1
t
VT2
U b2
VT4 VD2 VD4
U b4
ton
VT2
T
VT2
t
0
t
答案
PWM的高开关频率使晶体管-直流脉宽调速 的高开关频率使晶体管- 使晶体管 系统的频带较宽, 频带较宽 系统的频带较宽,提高系统快速性
1.3.2 脉宽调速系统的开环机械特性 稳态: 稳态:电机的平均电磁转矩与负载转矩相平衡 的状态
U d − I d R γU s − I d R n= = Ce Ce
2 4 2 4 b2 b4
缺点:需要防止单边导通事故 缺点:需要防止单边导通事故 单边导通
§1-3 直流脉宽调速系统
优点: 主电路简单 主电路简单, 优点:1.主电路简单,需用的功率器件少 2.开关频率高,电流容易连续,谐波少 开关频率高, 开关频率高 电流容易连续, 3.低速性能好,稳速精度高,调速范围宽 低速性能好, 低速性能好 稳速精度高, 4.系统频带宽,快速响应性能好,动态抗扰 系统频带宽, 系统频带宽 快速响应性能好, 能力强 5.主电路元件工作在开关状态,导通损耗小, 主电路元件工作在开关状态, 主电路元件工作在开关状态 导通损耗小, 装置效率高
Us
t4
2 T
t on
t
4
3
轻载电动状态的电压、 轻载电动状态的电压、电流波形
2.可逆PWM变换器 2.可逆PWM变换器 可逆PWM
(一)双极性可逆PWM变换器 双极性可逆 变换器
Ub1 Ub4
Us
0
VT1 VT4
VD2 VD3
VT1 VT4
VD2 VD3
VT1 VT4
t
ton
T t
Ub3 Ub2 0
U b3
优点( ) 优点(1)电流一定连续 M VT VT (2)电机在四象限运行 ) VD VD U (3)电机停止时有微振 U ) 电流, 电流,能消除静摩擦死区 (4)低速时,每个晶体管的驱动脉冲仍较宽,有 )低速时,每个晶体管的驱动脉冲仍较宽, 利于保证晶体管可靠导通 (5)低速平稳性好,调速范围达 )低速平稳性好,调速范围达20000左右 左右
U d = γU s
γ =1 γ = 0.75 γ = 0.5 γ = 0.25
− I d −Teav
I d Teav
1.3.3 脉宽调速系统的控制电路
Uc
1.3.3 脉宽调速系统的控制电路 脉宽调制器UPW 一、脉宽调制器UPW 电压 脉冲
Usa-锯齿波调制信号 Uc-控制信号 Ub-负偏移电压 Upw-调制输出电压
1.3.3 脉宽调速系统的控制电路
一、脉宽调制器UPW 脉宽调制器UPW Usa-锯齿波调制信号 Uc-控制信号 Ub-负偏移电压 Upw-调制输出电压
Usa -Ub 0 Upw 0 t
Usa Ub Uc
R0 R0 R0
+ + Upw
锯齿波脉宽调制器(UPW) 图4-9 锯齿波脉宽调制器(UPW)