一种对称解耦硅微陀螺仪的结构设计与仿真
硅微振动陀螺仪设计与性能测试

硅微振动陀螺仪设计与性能测试贾方秀;裘安萍;施芹;苏岩【摘要】介绍了基于DDSOG(Deep Dry Silicon On Glass)工艺自主研发的硅微振动陀螺仪的结构,封装,及信号与性能检测.利用结构解耦的方法和DDSOG工艺设计和制备了双质量线振动式陀螺结构.为了提高它的机械灵敏度、可靠性和长期稳定性,采取真空封装技术实现了器件级真空封装,并消除了轴向加速度等共模干扰的影响.陀螺电路采用自激闭环驱动、开环检测的方式,简化了电路.为了降低环境温度对陀螺零偏的影响,研究了既定范围内陀螺的输出特性,建立了陀螺输出与温度之间的关系模型,设计了温度补偿电路,降低了陀螺整表的功耗和体积.对采用上述技术的硅微陀螺仪进行了性能测试,测试结果表明,陀螺Q值>100 000,量程为±500(°)/s,标度为21.453 mV·(°)-1s-1,非线性和对称性分别为36.905×10-6和184.125×10-6.常温下陀螺零偏稳定性为7.714 3(°)/h,带宽为100 Hz,整表体积为31mm×31mm×12mm,功耗为288 mW.该陀螺仪性能好、体积小、功耗低,在中等精度的惯性导航系统中有较好的应用前景.【期刊名称】《光学精密工程》【年(卷),期】2013(021)005【总页数】10页(P1272-1281)【关键词】硅微振动陀螺仪;真空封装;自激驱动;温度补偿【作者】贾方秀;裘安萍;施芹;苏岩【作者单位】南京理工大学MEMS惯性技术研究中心,江苏南京210094;南京理工大学MEMS惯性技术研究中心,江苏南京210094;南京理工大学MEMS惯性技术研究中心,江苏南京210094;南京理工大学MEMS惯性技术研究中心,江苏南京210094【正文语种】中文【中图分类】V241.5;V666.1231 引言硅微机械陀螺是一种(Micro-Electro-Mechanical Systems)MEMS传感器,具有微型化、智能化、多功能集成化和适于批量生产等优点。
微机械陀螺仪的微结构分析与设计

微机械陀螺仪的微结构分析与设计
微机械陀螺仪的微结构分析与设计
针对基于微米技术的微机械陀螺检测功能微弱的现象,本文建立了振动轮式微机械陀螺仪的机电系统动力学模型.经对某微陀螺结构的仿真计算发现,哥氏阻尼力随激励哥氏力增大而增大,造成电容检测信号极为微弱,无论激励的幅度和频率如何.为此,本文给出了一种新型振动轮式微陀螺结构,可减小哥氏阻尼力,相对增大了激励哥氏力.这种新型结构显著增强了电容检测信号,而且具有双轴微陀螺功能、对耦合线加速度不敏感等特点.
作者:贾建援王志荣冯小平作者单位:贾建援,王志荣(西安电子科技大学机电工程学院)
冯小平(西安电子科技大学电子工程学院)
刊名:仪器仪表学报ISTIC EI PKU英文刊名:CHINESE JOURNAL OF SCIENTIFIC INSTRUMENT 年,卷(期):2001 22(5) 分类号:V24 关键词:微机械陀螺仪微电子机械系统微惯量测量组合机电系统动力学微结构设计。
一种新型微机械陀螺仪结构方案设计与仿真
摘 要 :为 了解 决微机 械 陀螺 仪 驱动 和检 测模 态耦 合 的 问题 ,提 出了一种 新 型 的双质 量 块双 线振 动 结构 方案 。根 据微 陀螺 的 结构 和 工作原 理 ,对 其驱 动 和检 测模 态进 行 了理论 分析 ,给 出 了简化 的动 力 学方程 ,并利 用A Ys 限元 分析 软件 Ns 有
一
、
模 态和 和质 量 块反 相振 动 的驱 动模 态 , 根 据其 驱 动方 向动 力 学模 型 ,可 以得 到伪 驱 动模 态频 率 为
v rf hec re t s e i n. e iy t o r cne sofd sg
Ke wo d : mirma hn dg r so eCo r eSr cued c u l gQu l yfco ; y r sM co c ie yo c p ; mbd i ;tu tr eo pi ; ai atr v n t ANS i lt n YSs muai o
(.c o l f l t n a Ma h n a E gn eigU i ri f lcrnc c n e T c n Ig ,h n d 6 7 1 ia 1S h o o Ee r i l c a i l n ie r ,nv syo e t iS i c & e h oo yC e g u 1 3 , n co c & c n e t E o e 1 Ch 2S i z u n i d u d sr o pC .LdS i z u n 0 0 3 , hn ; . h i h a g Kn aP mpI u t Gru o , t. h i h a g 5 0 5 C i j a g n y j a a
计算 机 光盘 软 件 与应 用
工 程 技 术
双解耦微机械陀螺设计、仿真及优化

双解耦微机械陀螺设计、仿真及优化摘要:双解耦微机械陀螺是一种新型的陀螺仪,并在近年来得到了广泛的关注和研究。
在本文中,我们将介绍双解耦微机械陀螺的设计、仿真及优化方案。
首先,我们将详细讨论该陀螺的结构和工作原理,并介绍其各个部分的设计和制造过程。
随后,我们将使用ANSYS软件进行仿真,并分析其性能指标。
最后,我们将探讨如何进行优化,以使陀螺的性能得到进一步提升。
关键词:双解耦微机械陀螺;设计;仿真;优化1. 引言陀螺作为一种重要的导航仪器,在航空、航天、军事等领域得到了广泛的应用。
传统的陀螺由于体积和重量较大,因此往往不适合微小尺寸的应用场景。
而微机械陀螺由于具有体积小、重量轻、功率低的特点,因此近年来受到了越来越多人的关注。
双解耦微机械陀螺由于其结构简单、体积小、灵敏度高等特点,成为了研究的热点之一。
在本文中,我们将介绍该陀螺的设计、仿真及优化方案。
下面将依次介绍各个环节的内容。
2. 双解耦微机械陀螺的设计双解耦微机械陀螺由四个部分组成:输入轮、感应盘、输出轮和转子部分。
其中,输入轮和输出轮分别位于转子的两端,用于提供转矩和控制转速。
感应盘和转子部分则是实现陀螺作用的关键部分。
下面将分别介绍它们的结构和设计过程。
2.1 输入轮和输出轮输入轮和输出轮在设计上需要考虑其结构的合理性和材料的选取。
其中,输入轮需要承受外力作用并转动,因此需要材料强度高、硬度好。
常用的材料有金属和硬质合金等。
输出轮则需要具有一定的惯性和转动平稳性,常用的材料有陶瓷、金属、石墨等。
2.2 感应盘感应盘的设计需要考虑其结构的稳定性和精度。
一般情况下,感应盘的材料可以选择金属或者硬质合金。
感应盘的外形可以采用圆形或者多边形等形状,以实现更好的灵敏度和几何形状限制。
2.3 转子部分转子部分是实现陀螺作用的关键部分,其结构和材料的选取将直接影响陀螺的性能指标。
常见的转子结构包括对称型和非对称型两种。
对称型转子所需控制电流相对较小,且能够极大地降低传感器背景噪声,因此适合高精度要求的场合。
硅微陀螺正交校正结构设计与试验

摘 要 :为从 源头上 消 除硅 微 陀螺 的正 交误 差 , 采 用 静 电修调 方 法 , 研 究正 交校 正 结 构设 计 问题 .
( Ke y L a b o r a t o r y o f Mi c r o — I n e r t i a l ns I t r u me n t a n d Ad v a n c e d N a v i g a t i o n T e c h n o l o g y o f Mi n i s t r y o f E d u c a t i o n , S o u he t a s t Un i v e r s i t y , Na nj i n g 2 1 0 0 9 6, C h i n a ) Abs t r a c t :To e l i mi na t e q u a d r a t u r e e r r o r o f s i l i c o n mi c r o- gy r o s c o p e a t t h e s o u r c e,e l e c t r o s t a ic t t im — r i n m g i s e mp l o y e d a nd d e s i g n i s s u e s a bo u t qu a ra d t u r e c o re c i t o n s t r u c t u r e a r e i n v e s t i g a t e d. Ba s e d o n t h e na a l y s i s o f he t e l e c ros t t a t i c t r i mmi n g p in r c i p l e, d e s i g n f u n d a me n t a l s a n d pa t t e r n s e l e c io t n o f he t c o r r e c t i o n e l e c t r o d e s a r e d i s c us s e d.A l a yo ut s c h e me wa s d e s i g n e d t o e l i i n m a t e i n t e r f e in r g e l e c t r o s t a t — i c f o r c e s nd a pa ra m e t e r o p t i i z m a i t on wa s c a r r i e d o u t t o i mp r o ve t he re a a ut i l i z a t i o n e ic f i e n c y. F o r a
电容式微机械陀螺仪的设计与仿真分析
自八十年代开始,以 IC 工艺为基础的微机械 加工技术逐渐开始应用于传感器的制造,人们开 始研制硅微机械陀螺仪。硅微机械陀螺与传统机 械式陀螺相比,有微型化和集成化、可靠性高和 寿命长、能耗低,易于数字化和智能化动态性能 好等一系列优点,因而得到广泛的应用[1~4]。电 容式微机械陀螺仪是目前微机械传感器研究的重 点,国内外对此展开了大量的研究[5~8]。
fx
=
1 2π
kx = 7709.3 m
fy
=
1 2π
ky = 7742.3 m
f
=
1 2π
ki m
对以上计算所得谐振频率与仿真的谐振频率 (1) 相比较,驱动模固有频率相差的百分比为:
其中,ki 是支撑系统沿 i 方向的刚度系数,m
是被支撑梁带动的运动部分的等效质量。所以, 从式(1)可知,传感器各阶模态的谐振频率主要取 决于传感器弹性梁在各个方向的弹性系数[11]。
(上接第 99 页)
参考文献: [1] 张均红,赵君辙. 惯性导航中陀螺仪的研究现状及发展趋势[J].科技论坛.2008,(7):60-61. [2] 张杨林. MEMS 技术的发展现状及应用[J].机械工人. 2005,(4):66-68. [3] 王寿荣. 硅微型惯性器件理论及应用[M].南京:东南大学出版社,2000:4-14. [4] 高钟毓. 微机械陀螺原理与关键技术[J]. 仪器仪表学报.1995,16(4):40-44. [5] P.Greiff, B.Boxenhorm, T. King, et al. Silicon monolithic micromechanical gyroscope. Tech.Dig.6thInt[J]. COuf.Solid-
6
结构解耦的双质量微陀螺仪结构方案设计与仿真

J R L OF S T E T U VE ST ( trl cec dt n OU NA OU H AS NI R I Y Na a SineE io ) u i
VO13 N o 5 .8 . Se t 2 08 p. 0
Ab ta t sr c :A e d a— s e o p e o bel e rvb ain l n w u lmasd c u ld d u l- n a irt a M S( co lcr me h nc l y — i o ME mir ee to c a ia s s
t e m)g rso ei po oe o eted c u l gpo l o ed vn d n e s gmo e yocp rp sdt sl e o pi rbe f h r igmo ea dsn i d s o v h n m t i n
真验 证 的基础 上 , 通过 调节 结构 参数 实现 了陀螺驱 动模 态 与敏 感模 态 固有 频 率 的 匹配 及 其 与 干 扰模 态 的 隔离. 2个质 量块 的差 动输 出能够有 效减 小 共模 信号 的干扰 , 变面 积 式 的梳 齿 电容布 置 方 式能使 微 陀螺在 空 气下 的模 态 品质 因数 显著 提 高. 该结 构 设 计 方案 能使 微 陀螺 的整 体 性 能得 到提 高 , 达到 了理 想 的设 计 目的.
量双 线振 动 式微机 械 陀螺仪 结构 方案 , 对驱 动和 检 测梳 齿 的 电容布 置 以及 梁 的 结构 形 式进 行 并 了设 计. 根据微 陀螺 的结构 和工作 原理 , 对该 陀螺 的驱 动 和 检 测模 态进 行 了理 论 分 析 , 出 了简 给 化 的动力 学方程 , 并利 用 AN Y S S有 限元 分 析 软 件进 行 了数 值 仿 真 , 以验 证 设 计 思 想 的 正确 性 . 仿 真结果 表 明 , 质量块 和 折叠 梁 的设 计使 该微 陀螺 能够 实现驱 动和 检测 模 态 的完全 解耦. 仿 双 在
硅微机械三轴陀螺仪的结构设计与仿真的开题报告

硅微机械三轴陀螺仪的结构设计与仿真的开题报告一、选题背景随着现代科技和工业技术的不断发展,越来越多的应用场景需要高精度的姿态控制技术支持,例如卫星通信、无人机、导弹、宇航器等。
而陀螺仪作为高精度姿态控制技术的核心器件之一,其自身的精度和稳定性直接决定了整个系统的性能和稳定性。
因此,对硅微机械陀螺仪的研究和开发具有重要意义。
硅微机械陀螺仪是利用微纳加工技术将微机电系统(MEMS)、光学技术和电子技术集成在一起的陀螺仪。
其结构简单、制造成本低、功耗小、响应速度快、重量轻等优点使其在军事、航空航天、汽车等领域中得到广泛应用。
本课题旨在研究硅微机械三轴陀螺仪的结构设计与仿真,以提高其性能和稳定性,为应用场景提供更为优秀的姿态控制解决方案。
二、研究目标本课题的主要研究目标如下:1. 建立硅微机械三轴陀螺仪的数学模型,分析其工作原理。
2. 设计硅微机械三轴陀螺仪的结构,优化其精度和稳定性。
3. 进行仿真分析,验证设计方案的可行性和性能。
4. 提出进一步优化的建议,为后续制造和实验提供参考。
三、研究内容和方法本课题的具体研究内容和方法如下:1. 硅微机械三轴陀螺仪的数学模型建立通过分析陀螺仪的工作原理,建立其数学模型。
采用旋转向量法,将角速度向量表示为旋转向量,得到姿态响应方程组。
采用微积分方法求解方程,得到姿态解算方程式。
2. 硅微机械三轴陀螺仪的结构设计通过对现有硅微机械陀螺仪的结构和性能分析,设计出一种新的硅微机械三轴陀螺仪结构。
采用SolidWorks等软件进行三维建模和分析,考虑结构的稳定性和精度等因素,优化设计方案。
3. 硅微机械三轴陀螺仪的仿真分析在MATLAB等软件中,基于建立的数学模型和结构设计方案,完成仿真分析。
包括姿态响应曲线、陀螺仪输出模拟等仿真数据分析,验证设计方案的可行性和性能。
4. 结果分析和建议提出通过对仿真结果的评估和分析,提出硅微机械三轴陀螺仪结构设计的优化建议,为后续制造和实验提供参考。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
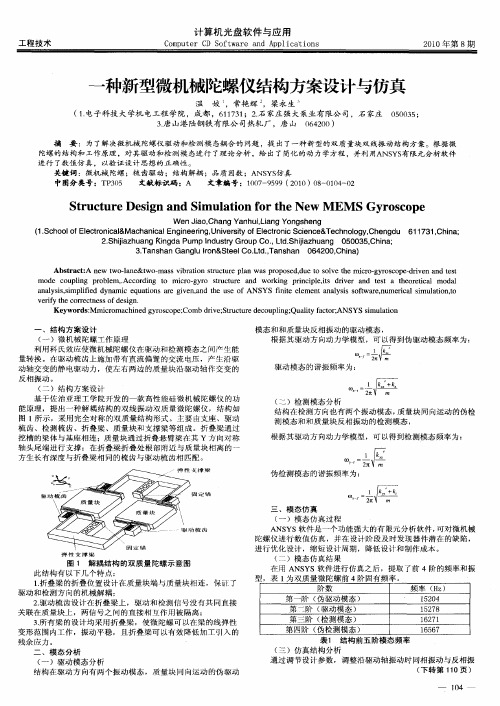
图 1 对称解耦硅微陀螺仪模型
x+ y+
ωx
Qx
2 + ωx x x=
Fd + 2Ωy m Fs − 2Ωx m
ωy
Qy
(1)
2 + ωy y y=
56
东南大学研究生学报
第5卷
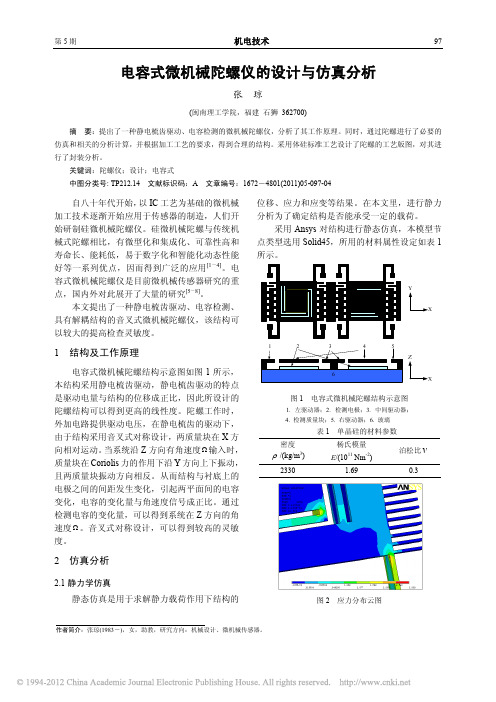
图2
对称解耦硅微陀螺仪 敏感模态 图 4 驱动和敏感模态仿真图
4 实验测试
图3 对称解耦硅微陀螺仪封装图
式中, ω x 和 ω y 分别为硅微陀螺仪驱动和检测方向 的固有谐振频率, Qx 和 Qy 分别为驱动与检测方向 的品质因数。假定 Fd = f d sin ω x t , f d 为静电驱动
非常小,可忽略不计,则稳态 力的幅值。由于 2Ωy
时,驱动模态的简谐振动为
1 对称解耦硅微陀螺仪工作机理
图 6 敏感模态的频率特性
从图中可知,敏感模态的谐振频率为 6540Hz, 计算可得其品质因数为 117。
5 结论
本文设计了一种对称解耦硅微陀螺仪,它的驱 动和检测支承梁完全相同且对称分布,使得驱动与 敏感的固有谐振频率受加工误差和温度变化的影 响近乎相同,因此驱动模态和检测模态匹配性好。 由于驱动和检测机构的梳齿都做滑膜阻尼振动,所 以驱动和检测模态的品质因数高。经实验测试,驱 动模态和检测模态的谐振频率分别为 6534 和 6540, 比仿真结果略低,这主要是由于加工时的过刻蚀引 起的。但由于此陀螺的对称结构形式,加工误差对 驱动和敏感模态的影响几乎相同,所以驱动与检测 的谐振频率只相差 6Hz。实验测试驱动与检测的品 质因数分别为 145.2 和 117。通常情况下,采用压 膜检测的硅微陀螺仪的检测模态品质因数只有 10 左右,由此可见该陀螺的检测模态品质因数有了显 著提高。对称解耦硅微陀螺仪的其它性能正在进行 测试,将在后续文章中报道。
本文设计的对称解耦硅微陀螺仪是一种采用 振动元件来检测转动角速率的双线振动式硅微陀 螺仪。 它的简单模型可表示为由质量块、 驱动机构、 检测机构、弹簧及阻尼器组成的两自由度系统,如 图 1 所示[3]。由图可知,该对称解耦硅微陀螺仪的 驱动机构和检测机构都做线性振动并完全解耦。它 的工作机理是由驱动机构产生静电力,驱动质量块 沿着水平方向振动,当垂直纸面方向有转动时,竖 直方向将产生哥氏力,激励质量块同时沿着竖直方 向振动。因竖直方向的振动幅值与转动速率成正 比,所以通过检测机构检测其振动幅值,则可以得 出垂直纸面方向的转动角速率。理想情况下,对称 解耦硅微陀螺仪的运动方程如下所示:
Q=
Байду номын сангаас
fc fH − fL
(5)
式中, f c 为频谱曲线峰值所对应的频率, f H 和 f L 分别为峰值下降 3dB 所对应的频率。 采用上述公式, 计算可得驱动模态品质因数为 145.2。 4.2 敏感模态 采用相同的方法,在微陀螺的上下两端固定电 极上施加电压,使得微陀螺沿敏感方向发生谐振,
驱动模态
Structural Design and Simulation of a Symmetrical and Decoupling Microgyroscope
Liu Mei, Zhou Bailing
(Department of Instrument Science and Engineering Southeast University, Nanjing 210096)
Abstract: A symmetric and decoupling silicon microgyroscope is designed. The drive and sense supporting beams are same and symmetrically arranged, which make the drive and sense frequency is similarly affected by the manufacturing error and temperature change so that the frequency difference between drive and sense is small. The drive and sense machines vibrate linearly and are completely decoupled, so the coupling between drive and sense mode is small and the microgyroscope can oscillate steadily. Because the moving combs of the drive and sense machines glide along the fixed combs, the quality factor of the drive and sense mode is high and sensitivity is largely improved. The experiment was done and found the frequency difference between drive and sense is only 6Hz, and their quality factors are respectively 145.2 and 117 in the atmospheric environment. Key words: Silicon microgyroscope;symmetric and decoupling structure;finite element analysis
x=
f d Qx cos(ωx t ) 2 mωx
(2)
当采用开环检测时, Fs = 0 ,那么哥氏力作用 下检测方向的运动表达式为
y=
−2ΩQx f d cos(ω x t − ϕ ) mω x
(ω
2 y
−ω
2 2 x
)
⎛ω ω +⎜ x y ⎜ Q ⎝ y
⎞ ⎟ ⎟ ⎠
2
(3)
式中, ϕ = − arctan ⎜
硅微陀螺仪是一种采用微加工技术制造,用于 测量物体的转动角或转动角速率的微型惯性传感 器。∗与传统陀螺相比,硅微陀螺仪具有体积小、重 量轻、功耗低、可与电路集成、批量制作成本低的
作者简介:刘梅,1977 年,女,博士研究生, 周百令,男,教授,博士生导师.
突出特点,使得它在汽车、机器人、航空、炮弹等 领域得到了广泛应用[1]。
4.1 驱动模态 在微陀螺的左右两端固定电极上分别施加相 位相反且频率等于微陀螺的固有频率的交流电压, 并叠加一个直流偏置电压,使得微陀螺沿驱动方向 发生谐振。在空气条件下,实验测得的驱动模态的 频率特性如下图所示
固有频率(Hz) 6554
图 5 驱动模态的频率特性
从图 5 可知,驱动模态的谐振频率为 6534Hz。 硅微陀螺仪的品质因数计算公式
3 ANSYS 仿真
采用有限元分析软件 ANSYS 对所设计的对称 解耦硅微陀螺仪进行了模态仿真,仿真结果如表 1 所示。从表中可知,驱动和敏感模态相匹配,且驱 动和敏感模态与干扰模态得到了很好的隔离。图 4 给出了结构的前两阶模态,分别为驱动模态和敏感 模态。
表 1 对称解耦硅微陀螺仪固有频率 模态号 1 2 6557 3 12220 4 22004
参考文献:
[1] N.Yazdi, F.Ayazi, and K.Najafi, Micromachined inertial sensors[C]. Proceedings of IEEE, 1998 86(8): 1640-1659. [2] Said Emre Alper and Tayfun Akin. A symmetric surface micromachined gyroscope with decoupled oscillation modes[J]. Sensors and Actuators A: Physical, 2002: 347-358.
第 5 卷第 1 期 2007 年 7 月
东南大学研究生学报
JOURNAL OF GRADUATE STUDENTS SOUTHEAST UNIVERSITY
Vol.5
No.1
JUL. 2007
一种对称解耦硅微陀螺仪的结构设计与仿真
刘梅, 周百令
(东南大学仪器科学与工程学院,南京 210096)
摘
要:本文设计了一种对称解耦硅微陀螺仪。它的驱动与检测支承梁完全相同且对称分布,驱动和敏感模态的谐振频率受
⎛
⎞ ⎟。 2 2 ⎟ ⎜ Qy (ω y − ω ) x ⎝ ⎠
ω xω y
从式(3)可知,当驱动频率与检测频率相匹配时, 即 ω x = ω y = ω ,敏感模态的振动幅值达到最大, 此时结构的灵敏度最高
y 2Qx Qy f d = mω 3 Ω
(4)
2 结构设计
本文设计的对称解耦硅微陀螺仪结构简图和 封装图分别如图 2 和图 3 所示。它的驱动和检测支 承梁完全相同且对称分布,这使得驱动和敏感模态 的谐振频率受加工误差和温度变化的影响近乎相 同,因此驱动与检测模态谐振频率匹配性好,结构 的灵敏度高。该微陀螺仪驱动与检测机构都做线性 振动且完全解耦,使得结构振动平稳,并消除了静 电驱动力引起的正交耦合误差。由图可知,检测机 构的活动梳齿相对固定梳齿作滑膜阻尼振动,使得 硅微陀螺仪敏感模态的品质因数显著提高,从式 (4)可知,结构的灵敏度也得到了提高。
lium45@;
第1期
刘 梅,一种对称解耦硅微陀螺仪的结构设计与仿真
55
本文设计了一种结构对称解耦硅微陀螺仪,它 的驱动和检测支承梁完全相同且对称分布,使得驱 动与敏感的固有谐振频率受加工误差和温度变化 的影响近乎相同, 驱动模态和检测模态匹配性好[2]。 它的驱动机构和检测机构都做线性振动并完全解 耦,所以驱动和敏感之间的耦合小,结构振动平 稳性好。由于驱动和检测机构的梳齿都做滑膜阻尼 振动,所以驱动与检测模态的品质因数高,结构的 灵敏度大大提高。