09刚体的平面运动
第九章刚体的平面运动PPT学习教案

v
A
B
v
B vB Av
C
vA v C
CA
v
AA
O 0
第20页/共123页
例题4 已知: OA= OO1 = r,BC=2r,∠OAB=45°,求:连此瞬 时C点 的速度 vC 。
解:(1) 机构的运动分析
C
vCB
(2) 取A为基点,研究B点
vB vA vBA vA r0
vB vBA vA cos 45
选o为基点应用加速度合成定理aoaoao第85点相对于基点o的法向加速度沿半径oa指向中心o大小为aoaobobo所以b点的加速度大小为它与半径ob间的夹角为arctanarctanarctan其中第8795运动学综合运用对于工程中复杂的机构运动首先要分清各物体的运动形式计算有关联接点的速度和加速对于有关运动量的计算有两种分析方法全过程分析法和瞬时分析法
●
这一运动过程可视为图形先随基点 A 作平动。再绕基点 A’ 作定轴转动,转过角度为Δ 。
●
这一运动过程又可视为图形先随基 点B作 平动。 再绕基 点 B’ 作定轴转动,转过角度为Δ ’ 。
B Ⅰ
A
上 述两种 运动分 解方式 ,得到 相同 的 结果。 而实际 上平动 和转动 是同 时 进行的 。
B B
第27页/共123页
三、平面图形上各点的速度
选取速度瞬心P为基点,则平面 图形上任一点B的速度 等于该点随图 形绕速度瞬心转动的速度。
vB vP vBP vBP
大小: vB BP
vB
B
vA
C
A
S P
vC
方向: BP, 指向与 转向相一致。
由此可见,只要已知图形在某一瞬时的速度瞬心
刚体的平面运动
瞬时针方向
例2: 图示椭圆规。已知 :AB =l=20㎝, vA=20㎝/s,φ=30°, C为杆AB的中点。试求 :vB 、ωAB 、 vC 。
解: (1)分析各刚体的 运动,选取研究对象
选取AB作为研究对 象
(2)分析与AB连接点的运 动,选取运动已知的点 为基点
选A点 —— 基点(A点 运动已知)
解
(1)分析运动,确定基点。轮I做平面 运动,O点加速度可求,选其作为 基点。
(2)基点O的速度、加速度、轮I角速度
vo L 1,ao L12
vo r
L r
1
(3)求B点的加速度
aB ao aτBo aBno
v0
aτBo 0
aBno
r 2
L2 r
12
aB
ao2
aBnO
2
L1
1
vB= vA+ vBA
大小: ? ? 方向: (4)由三角关系求出所求量。
vA A r 900
o
l
vA
B
vB vBA
vB
vBA
vc
vCA
vA
B vA
AB
C vA
A
y
vB
vr =vBA
y'
r'B B
ve =vA
vA S
A
x'
0
x
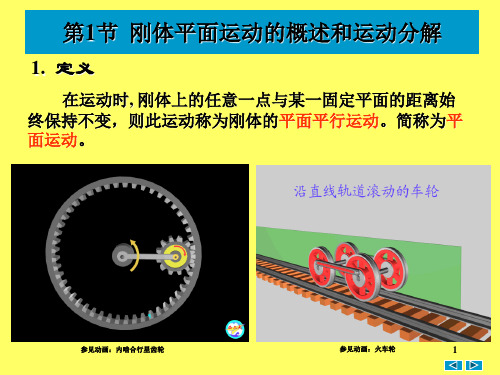
1、定义
第三节 速度投影定理
平面图形上任意两点的速度在该两点连线上的投影相 等。——速度投影定理
vC vA2 vC2A 2vA vCA cos vA2 (AB l / 2)2 2vA (AB l / 2) cos
20(cm / s)
第八章刚体的平面运动
其中,i ,j 为x,y 轴的单位矢量。
14
2. 速度投影定理
同一平面图形上任意两点的速度在这两点连
线上的投影相等。
证明:
vB =vA +vBA
vBA vB
∵(vB )AB= (vA )AB+ (vBA) AB
A
B
vA
vA
而vBA 垂直AB,在AB两点连线上的投影为零
∴ (vB )AB= (vA )AB
O
30 A 60 60 B vB 已知方向,可求出连杆CB的速度瞬
vA
心Cv2。
36
例题
刚体的平面运动
例题8
因为
CCv2 CB tan 30
3l 3
故得连杆CB角速度的大小
C
Cv2
Cv1
vC
CB
vC CCv 2
3 l
vA
它的转向沿逆时针。于是滑块B 速
度的大小为
O
30 A
vA
60 60 B vB
M3和M4各点的加速度大小。
39
例题
刚体的平面运动
例题9
解: 因在此瞬时O点的加速度是已知的,
M3
故选O点为基点,则齿轮节圆边缘上任一
点M 的加速度为:
aO vO M4
M2
RO
a O
因为任一瞬时齿轮的角速度 vO ,
R
M1
因此,可对此式求导数,从而求得齿轮
的角加速度
O
ψ
A vB
vA=u
vB
u
tan
,
vBA
u
sin
,
所以
AB
vBA l
u l
第九章刚体的平面运动

刚体的简单运动:平移、定轴转动第九章刚体的平面运动刚体的复杂运动:刚体的平面运动平面运动平移+转动绕不断运动的轴的转动本章内容:刚体平面运动的分解;平面运动刚体的角速度、角加速度;刚体上各点的速度、加速度。
行星齿轮机构(动画)行星轮平面运动:在运动中,刚体上的任意一点与某一固定 平面始终保持相等的距离。
曲柄连杆机构用一个平行于固定平面的平面截割连杆; 连杆 截面S :一个平面图形平面图形上各点的运动可以代表刚体内所有点的运动。
过平面图形上任一点作垂直于图形的直线;直线作平移刚体作平面运动 刚体的平面运动可简化为平面图形在它的自身平面内运动。
— 平面图形的运动方程 x y oo' Mϕ线段上任一点O '的位置 ⎪⎩⎪⎨⎧==='')()()(321t f t f y t f x o o ϕ平面图形在其平面上位置的确定平面图形的运动方程由两部分组成:平面图形按O'点的运动方程的平移;线段与固定坐标轴x 轴的夹角 ϕ平面图形绕O'点转角为的转动。
ϕ例如车轮的运动.例如车轮的运动.车轮的平面运动可以看成是车轮随同车厢的平动和相对车厢的转动的合成.车轮对于静系的平面运动(绝对运动)车厢(动系Ax' y') 相对静系的平动(牵连运动)车轮相对车厢(动系Ax' y')的转动(相对运动)我们称动系上的原点A为基点,于是 车轮的平面运动随基点A 的平动 绕基点A'的转动刚体的平面运动可以分解为随基点的平动和绕基点的转动.再例如: 平面图形S在∆t时间内从位置I 运动到位置II ✶以A 为基点: 随基点A 平动到A'B''后, 绕基点转角到A'B' ✷以B 为基点: 随基点B 平动到A''B'后, 绕基点转 角到A'B' 图中看出:AB // A'B'' // A''B' ,于是有 21ϕϕ∆=∆1ϕ∆2ϕ∆2121212010, ; , lim lim εεωωωω∆ϕ∆∆ϕ∆∆∆====→→dt d dt d tt t t §9-1 刚体平面运动的概述和运动分解所以,平面运动随基点平动的运动规律与基点的选择有关,而绕基点转动的规律与基点选取无关.(即在同一瞬间,图形绕任一基点转动的ε ,ω都是相同的)基点的选取是任意的。
第9章 刚体的平面运动(2012zx)

第八章
刚体的平面运动
基本特征
平面图形上各点的速度
平面图形上各点的加速度
一、基本特征
1.工程实例
动画
1.工程实例
动画
2. 定义
刚体的平面运动 —— 刚体上任一点到某一 固定平面的距离保持不变。
刚体平面运动简化
动画
3. 简化
平面图形在其自身平面的运动
atBA
B
anBA aA
α
A
aB aA A aA
a B a A a BA n aB a A aBA aBA
AB AB
2
aa ae ar
平面矢量式 两个分量式, 求解两个未知量
B A AB顺
例题 如图,车轮沿直线轨道作无滑动的纯滚动, 已知: r, ω , α, vC ,aC 。求轮缘上A,P点的加 速度。 ω vC aC C
( )
2
( )
r
例题
曲柄滚轮机构的曲 柄长度与滚轮半径 均为15cm,曲柄转 速 n = 60 rpm。 求:当 =60º 时 (OAAB)滚轮
的角速度B与角
加速度B。
例题
1 .运动分析: OA定轴转动 解: AB杆和轮B平面运动
P1
2. 速度分析:(画各连接点速度矢)
对AO 杆: n / 30 60 / 30 2 rad/s
平面图形上 各点代表一 直线(垂直 图面)的运 动; 整个平面图 形的运动代 表刚体的平 面运动。
3. 简化
平面图形在其自身平面的运动
平面图形上 各点代表一 直线(垂直 图面)的运 动; 整个平面图 形的运动代 表刚体的平 面运动。
刚体的平面运动
a
A
n BA
aA
于是, B 点的加速度便是 A的加速度( 牵连加速度) 与B点绕A点转动的加速度 ( 相对加速度) 的矢量和.
需要注意的是:
a B a A a n a BA BA
考虑到A , B 两点加速度的分解, 上式可写成:
n n a B a B a A a A a n a BA BA
刚体的运动方程退化为:
t
刚体绕O´ 轴作定轴转动. 转动方程为 t 由此可见, 刚体的平面运动可以看成是由刚体的平动和定轴转动叠加而成 的运动. 如图上的刚体作平面运动, 可以看作以O´ 描述的刚体的平动和刚体绕O´ 点转动的合成运动. 我们在这里称O´ 点为‘ 基点 ’.
VM
V MO'
VO'
M
: 取O´ 点为基点, ( 这时, 可想象平面 上建立了一个运动的状态可用 O´ 点来描述的平动坐标系. 于是, M 点的速度便是 O´ 的速度( 牵连速 度)
VO'
O´
与M 点绕O´点转动的速度( 相对速度) 的矢 量和.
VM
V MO'
VO'
M
Va Ve Vr V M VO' V
V B
2 r2
2 r1 r2 0
方向如图示
例三.( 习 9 – 12 ) 图示小型精压机的传动机构, OA = O1B = r = o.1 m , EB = BD = AD = l = 0.4 m .在图示瞬时, OA AD , O1B ED , O1D 连线为水平. OD 及 EF 连线为铅直. 已知曲柄 OA 的转速为 n = 120r/min , 求: 此时压头 F 的速度. E C B O1 解: ED , AD 杆平面运动. 由结构及 E , B 点可能的运动方向 ED 杆的速度瞬心为 C 点 ( 如图示 )
《刚体的平面运动 》课件

鲁棒性分析
分析控制系统对参数变化和外部干扰的鲁棒 性表现。
05
刚体的平面运动的展望
刚体的平面运动的发展趋势
理论研究的深入
随着数学和物理学理论的不断发展,人们对刚体的平面运动的理 解将更加深入,这有助于推动相关领域的研究和应用。
航空航天领域
在航空航天领域,刚体的平面运动对于飞行器的姿态调整和机动性有着 至关重要的作用,未来随着空间探索的深入,其应用前景将更加广阔。
03
医疗器械
刚体的平面运动在医疗器械领域也有着广泛的应用,例如在手术机器人
中用于精确控制手术器械的动作,提高手术的精度和安全性。
刚体的平面运动的挑战与机遇
挑战
刚体的平面运动的研究和应用面临着 一些挑战,如精确控制、稳定性、复 杂环境下的适应性等问题,需要不断 探索和创新来解决。
自动化生产线
刚体的平面运动在自动化生产线中起到关键作用, 如传送带、机器人手臂等。
机械设备的维护和检修
刚体的平面运动在机械设备的维护和检修中也有应 用,如对机械设备进行定位和调整。
航空航天中的应用
飞机起降系统
刚体的平面运动在飞机起降系统中起 到关键作用,如飞机滑行、转向等。
航天器对接
航空航天器的制造和测试
刚体的平面运动的重要性
实际应用
刚体的平面运动在实际生活中广泛存 在,如机械设备的运作、车辆的行驶 等。
理论意义
刚体的平面运动是刚体运动的基础, 对于理解更复杂的刚体运动形式具有 重要意义。
刚体的平面运动的基本原理
平移原理
刚体在平面内沿直线进行平移时,其上任意一点都沿着该直线进行等距离的移 动。
旋转原理
详细描述
在实际的物理问题中,刚体往往不会只进行平动或转动,而是同时进行这两种运动。这种复杂的平面运动形式通 常包括椭圆运动、抛物线运动等。这种复杂的运动形式通常需要综合考虑平动和转动的共同作用,以确定刚体的 最终运动轨迹。
理论力学第9章-刚体的平面运动
S 在平面运动时,基点 A 的坐标 xA,yA 和夹角j 都随
时间而变化。
x y
A A
f1(t ) f2(t )
j f3(t )
(9-1)
y
y
B
yA
Aj
x
O
xA
x
刚体平面运动的运动方程(Equations of planar motion of rigid bodies)
竖直位置处点A、B、C、D的速度。
解:选轮心O为基点,先研
究点C的速度。由于圆轮沿直线 轨道作无滑动的滚动,点C的速 度为
vC vO vCO 0
圆轮的角速度为 vCO vO
RR
A
vDO
vD
D vO O
vO
vAO
vA
vO B vO
vCO
C
vBO vO
vB
各点相对基点的速度为 vAO vBO vDO R vO
[vB ]AB [v A ]AB
vB
vBA
j
vA
B
vB cos(90 j) vA cosj
vB vA cot j
vA
j
A
比较基点法和速度投影法可知,当已知平面图
形上一点速度的大小和方向以及另一点速度的方位
时,应用速度投影法求该点速度的大小和指向是很
方便的,但用速度投影法不能求出平面图形的角速
随着点 M 在垂线 AN 的位置不同,vM 的大小也不
同,总可以找到一点 C,这点的瞬时速度等于零。
vC vA ω AC 0
AC vA ω
刚体作平面运动时,在每一瞬时,图形内必有一 点为速度瞬心;速度瞬心是随时间而变化的,在不同 瞬时,平面图形有不同位置的速度瞬心。